Широке поширення в різних галузях народного господарства набули асинхронні двигуни трифазного струму. короткозамкненим ротором. Вони не мають ковзних контактів, прості по облаштуванню та обслуговуванню Двигун з короткозамкненим ротором у розібраному вигляді показаний на рис. 1. Основними його частинами є статор та ротор. Сердечники статора та ротора набирають із листів електротехнічної сталі.
У пазах сердечника статора укладають та закріплюють трифазну обмоткуЗалежно від напруги мережі живлення і даних двигуна її з'єднують зіркою або трикутником. Висновки статора обмоток маркують, завдяки цьому полегшується складання потрібної схеми з'єднання.
Відповідно до ГОСТ 183-74 прийняті наступні позначення висновків обмоток окремих фаз відповідно початок і кінець першої фази С1 і С4, другий - С2 і С5 і третьої - СЗ і С6 (рис 2). Розташування висновків на коробці контактних затискачів двигуна повинно задовольняти вимогу простоти з'єднання обмоток за будь-якою схемою. Обмотку ротора від сердечника не ізолюють. Її разом із вентиляційними лопатками виконують литий з алюмінію або його сплавів. Стрижні обмотки і кільця, що коротко замикають, утворюють так звану біличну клітину.
Конструктивне виконання двигунів залежить від способу вентиляції та ступеня захисту.
Асинхронні короткозамкнуті двигуниєдиної серії 4А за способом охолодження та ступеня захисту персоналу від зіткнення з струмопровідними або обертовими частинами, а також самої машини від попадання в неї сторонніх тіл мають два виконання (ГОСТ 14254-80): закрите обдуваемое (позначення IP44), захищене .
Двигуни виконання IP44 мають аксіальну систему вентиляції. Повітря подається вентилятором і обдуває зовнішню поверхню оребреної станини.
Для двигунів IP23 характерна двостороння радіальна система вентиляції, яка здійснюється за допомогою вентиляційних лопаток, розташованих на короткозамикаючих кільцях ротора.
Модель динаміки трифазної асинхронної машинитакож відомий як індукційна машина. Блок асинхронної машини реалізує трифазну асинхронну машину. Він працює або в режимі генератора або в режимі двигуна. Режим роботи продиктований знаком механічного моменту.
Електрична частина машини представлена моделлю стану станів четвертого порядку, а механічна частина - системою другого порядку. Усі електричні змінні та параметри відносяться до статора, позначеного первинними знаками у наступних машинних рівняннях. Усі величини статора і ротора перебувають у довільній двоосьової системі відліку. Індекси, що використовуються, визначені в цій таблиці.
Рис. 1 Асинхронний двигун із короткозамкненим ротором у розібраному вигляді
1 - статор; 2 - клемна коробка, 3-ротор 4 - підшипникові щити, 5 - вентилятор, 6 - кожух вентилятора
Двигуни цієї серії мають таку структуру позначень: 4 – порядковий номер серії; А – найменування виду двигуна – асинхронний; А - станина та щити з алюмінію; X - станина з алюмінію та чавунні щити; 56-355 – висота осі обертання; S, L, М – настановні розміри по довжині корпусу; А, В – позначення довжини сердечника (перша довжина – А, друга-В); 2, 4, 6, 8, 10, 12 число полюсів; У - Кліматичне виконаннядвигунів; 3 – категорія розміщення. Наприклад: 4АА56А2УЗ - електродвигун серії 4, асинхронний, закритого виконання, станина та підшипникові щити з алюмінію, з висотою осі обертання 56 мм, сердечник першої довжини, двополюсний, для районів помірного клімату, категорії розміщення 3.
Електрична система ранової роторної або білкової машини
Ω – опорний кадр кутової швидкості.
Електрична система подвійної безводної машини
Параметри блоку асинхронної машини визначаються наступним чином. Обидва блоки моделюють ту саму модель асинхронної машини. Визначає тип ротора: рана, білизна клітина чи подвійна клітина з білками.Для одиночних машин із короткозамкненим ротором забезпечує набір заданих електричних та механічних параметрів для різних асинхронних номінальних характеристик машини, міжфазної напруги, частоти та номінальної швидкості. Виберіть одну з попередньо встановлених моделей для завантаження відповідних електричних та механічних параметрів у записі діалогового вікна. Попередньо встановлені моделі не містять заданих параметрів насичення.
Рис 2 Розташування висновків на щитку двигуна при з'єднанні: а - зіркою; б - трикутником 
Таблиця 1
Тип двигуна |
|||
n = 3000 об/хв Виберіть Ні, якщо ви не бажаєте використовувати попередньо встановлену модель або хочете змінити деякі параметри попередньо встановленої моделі. При виборі попередньо встановленої моделі електричні та механічні параметри на вкладці «Параметри» діалогового вікна стають незмінними. Щоб почати з цієї попередньо встановленої моделі, а потім змінити параметри машини. Вчиняючи таким чином, ви просто порушуєте з'єднання з конкретною встановленою моделлю.
|
|||
n = 1500 об/хв |
|||
n = 1000 об/хв Використання швидкості, оскільки механічний вхід дозволяє моделювати механічний зв'язок між двома машинами. На наступному малюнку показано, як моделювати жорстке з'єднання валу в мотор-генераторній установці, коли тертя момент ігнорується в машині. Ви можете вибрати такі перетворення опорних кадрів. Роторний стаціонарний. . Ця конфігурація також виправдовує використання двох лінійних вхідних напруг усередині моделі замість трьох лінійних напруг. У наступній таблиці показані значення, отримані Θ та β у кожній системі відліку. |
|||
Продовження табл. 1
Тип двигуна |
Номінальна потужність, кВт |
||
Основні технічні дані двигунів невеликої потужності серії 4А наведені у табл. 1.
Розроблено та випускається єдина серія асинхронних двигунів АІ. Поліпшення енергетичних, пускових та віброшумових характеристик машин цієї серії досягається за рахунок застосування нових матеріалів та конструктивних рішень.
Основні технічні дані двигунів невеликої потужності серії АІ наведено у табл. 2.
Трифазний струм, проходячи по обмотках статора, створює магнітне поле, що обертається. Частота обертання поля n називається синхронною. Вона залежить від частоти fi напруги живлення і числа пар полюсів р машини: ![]()
і при f 1-50 Гц приймає значення: 3000 об/хв (р ==1), 1500 об/хв (р=2), 1000 об/хв (р=3) і т.д.
Для частоти напруги мережі матимемо: 
Ротор асинхронного двигуна, обертаючись у напрямі обертання поля, розвиває частоту, дещо меншу, ніж синхронна, яка називається асинхронною.
Таблиця 2
Це також впливає на швидкість моделювання та в деяких випадках точність результатів. Використовуйте стаціонарну систему відліку, якщо напруга статора або несиметрична, або переривчаста, а напруга ротора збалансована. Використовуйте опорну раму ротора, якщо напруга ротора або несиметрична, або переривчаста, а напруга статора збалансована. Використовуйте або стаціонарні, або синхронні опорні рамки, якщо вся напруга збалансована і безперервна. Коли цей прапорець встановлений, на виході виміру використовуються імена сигналів для ідентифікації позначок шини.
Тип двигуна |
Номінальна потужність, кВт |
Синхронна частота обертання, об/ш<н |
||
АІР80А2-ОМ2 Виберіть цей варіант для програм, для яких мітки сигналів шини мають лише буквено-цифрові символи. Коли цей прапорець знято, вихідний сигнал вимірювання використовує визначення сигналу для ідентифікації шин мітки. Ця вкладка містить електричні параметри машини. Номінальна потужність, напруга та частота. Визначає, чи моделюється магнітне насичення ротора та статорного заліза чи ні. Задає параметри кривої насичення без навантаження. Магнітне насичення статора та заліза ротора моделюється шматково-лінійним співвідношенням, що визначає точки кривої насичення без навантаження. Перший рядок цієї матриці містить значення струмів статора. Другий рядок містить значення відповідної напруги на клемах. Перша точка має відрізнятися. Ця точка відповідає точці, де починається ефект насичення. |
||||
АІР80В4-ОМ2 |
||||
АІР80А6-ОМ2 |
||||
АІР80В6-ОМ2 |
||||
Відставання ротора характеризується ковзанням s. Якщо частоту обертання ротора позначити через ri2, то співвідношення для ковзання набуде вигляду 
або, %, 
З (2) слід, що ковзання асинхронного двигуна змінюється від одиниці (при пуску, коли п2-0) до нуля (при синхронній частоті обертання, тобто коли П2-П1). Зауважимо, що точної рівності частоти обертання поля та ротора у руховому режимі не досягається. Однак відставання ротора на холостому ходу машини так мало, що їх можна знехтувати. Значення ковзань при повному навантаженні двигуна зазвичай становлять 4-6%.
Вираз частоти обертання ротора можна отримати із співвідношення (2):
Зауважимо, що чисельник правої частини рівності (2) має певний фізичний зміст. Різниця частоти обертання поля та ротора являє собою відносну частоту обертання, тобто частоту обертання поля щодо ротора ns, або частоту ковзання.
приклад. Відомі «1 = 1000 об/мнн, s = 4%. Обчислити частоту обертання ротора та відносну частоту обертання.
Маємо: ла = 1000 (1-0,04) = 960 об / хв, ns = nl-n2 = 1000-960 = = 40 об / хв.
Частота ЕРС і струмів, що наводяться в обмотці ротора магнітним полем, що обертається, визначається частотою ковзання: 
Шляхом нескладних перетворень цей вираз наводиться до вигляду
тобто. частота ЕРС і струмів ротора за умови ft – const пропорційна ковзанню.
приклад. Знайти частоту струму ротора попереднього прикладу.
Маємо-/2=/lS=50-0,04=2 Гц.
Потужність, що розвивається двигуном, в межах нормальних навантажень пропорційна ковзанню. Тому про навантаження машини можна судити з ковзання. ![]()
Якщо ви не встановите прапорець "Симуляція насичення", співвідношення між струмом статора та напругою статора буде лінійним. Час вибірки. Задає час вибірки, що використовується блоком. Можливі наступні варіанти: Трапецеїдальна ітеративна та Трапецієподібна ітеративна. Розділ "Моделювання дискретних електричних систем". Ці параметри потоку навантаження використовуються лише для ініціалізації моделі.
Вони не впливають на модель блоку або продуктивність моделювання. Вкажіть механічну потужність, прикладену до валу машини, у ватах. Коли машина працює у режимі двигуна, вкажіть позитивне значення. Коли машина працює у режимі генератора, вкажіть негативне значення.

Використання потужності двигуна в процесі експлуатації може бути різним. Коефіцієнт використання потужності ![]()
де Рг – корисна потужність при довільному навантаженні; Рном - номінальна потужність, т. е. корисна потужність, яку розрахована електрична машина.
Номінальній потужності відповідає номінальна напруга. Двигун споживає у своїй номінальний струм, маючи номінальні значення частоти обертання, потужності валу, ККД і cos φ.
Призначення двигуна полягає у перетворенні електричної енергії на механічну. У процесі перетворення виникають втрати. Вони представляють ту частину активної потужності, яка витрачається на нагрівання обмоток, стали осердя статора та подолання сил тертя.
Відношення корисної потужності Р2, що розвивається двигуном на валу, до активної потужності Р\, що споживається ним з мережі, називається коефіцієнтом корисної дії: ![]()
Крім активної, двигун споживає реактивну потужність, що намагнічує, необхідну для утворення магнітного потоку. Таким чином, повна потужність двигуна 5 складається з активної та реактивної складових: 
де Q – реактивна потужність двигуна.
Про відносне значення перетвореної потужності судять за коефіцієнтом потужності. Чим краще використовується потужність машини, тим вищий коефіцієнт потужності. Для його обчислення досить активну потужність поділити на повну: 
де U, I - фазні значення напруги та струму.
приклад. На щитку трифазного асинхронного двигуна з короткозамкненим ротором є такі позначення: Д"А. 220/
Коли вхід є негативним сигналом, асинхронна машина поводиться як генератор. Альтернативний вхід блоку – швидкість машини. Ці двигуни можуть працювати як безпосередньо від мережі, і від регульованої. Програми для цих двигунів охоплюють практично всі стадії виробництва та обробки.
Програми також поширюються на комерційні будівлі та внутрішнє середовище. Вони використовуються для приводу насосів, вентиляторів, компресорів, міксерів, мішалок, млинів, конвеєрів, дробарок, верстатів, кранів і т.д. і т.д. Не дивно, що цей тип електродвигуна настільки популярний, коли він враховує його простоту, надійність та низьку вартість.
380, 10,5/6,1 А, 2,8 кВт, 50 Гц, 2880 об/хв, КДД=81,5 %, cos 
(В даному випадку вона дорівнює 3000 об/хв), то ковзання при номінальному навантаженні складе:
Повна потужність двигуна при номінальному навантаженні SHom = 3l/ном /ном = 3-220-6,1« 4000 В-А = 4 кВ-А.
Активна потужність, що споживається двигуном при номінальному навантаженні,
Рхном = 31/ном /ном «Ф,ном = 3-220-6,1-0,86 = 3,44 кВт.
Втрати у двигуні при номінальному навантаженні
2ДРіш = Ртш – Р2 = 3,44 – 2,8 = 0,64 кВт.
З використанням даних табл. 1 побудовані криві залежності коефіцієнта потужності двигунів від їхньої номінальної потужності (рис. 3).
Крива 1 відповідає синхронній частоті обертання 3000 об/хв, 2 - 1500 об/хв і 3-1000 об/хв. З рис. 3 видно, що коефіцієнт потужності асинхронного двигуна залежить від номінальної потужності та синхронної частоти обертання.
Зі збільшенням потужності за постійності синхронної частоти обертання («!=const) зменшується відносне значення повітряного зазору. Завдяки цьому відносна реактивна потужність, що намагнічує, також зменшується, а коефіцієнт потужності зростає. До такого ж результату призводить збільшення синхронної частоти обертання за сталості номінальної потужності двигуна. Швидкісні машини мають менші габарити, що обумовлено зменшенням моменту, що обертає, у них істотно зменшується обсяг повітряного простору між сердечниками статора і ротора.
Криві залежності питомої потужності, що намагнічує, двигунів від номінальної при - const показані на рис. 4, звідки видно, що питома потужність, що намагнічує, тим менше, чим більше номінальна потужність двигуна і вище синхронна частота обертання.
Хоча базова конструкція асинхронних двигунів за останні 50 років не дуже змінилася, сучасні ізоляційні матеріали, комп'ютерні методи оптимізації дизайну та автоматизовані методи виробництва призвели до створення двигунів меншого фізичного розміру та меншої вартості на кВт.
Міжнародна стандартизація фізичних розмірів та розмірів рамок означає, що двигуни більшості виробників фізично взаємозамінні та мають схожі характеристики. Підшипники - єдині частини двигуна із короткозамкненим ротором. Для цього типу конструкції не потрібні скоби та щітки. Поліпшення в сучасній конструкції з попереднім мастилом підшипників продовжують термін служби цих двигунів.

Рис. 3 Криві залежності коефіцієнта потужності від номінальної потужності асинхронних двигунів за різних значень синхронної частоти обертання:
1 - «1=3000 об/хв; 2-/2,-1500 об//хв; 3 - «1 = 1000 об/хв 
Однофазні двигуни найчастіше використовуються для побутових цілей. Стаціонарна частина називається ротором статора, званим ротором, що підтримується на кожному кінці підшипниками. Статор і ротор складаються з. Електричний ланцюг, зазвичай зроблений із ізольованої міді або алюмінію, повинен витримувати струм магнітного ланцюга, зазвичай зробленого з ламінованої сталі, для перенесення магнітного потоку. Статор є зовнішньою нерухомою частиною двигуна, яка складається з.
Зовнішня циліндрична рама двигуна, виготовлена із листової сталі, чавуну або литого алюмінієвого сплаву. Магнітний шлях, який містить набір сталевих щілинних ламінатів, втиснутих в циліндричний простір усередині зовнішньої рами. Магнітний шлях ламінований для зменшення вихрових струмів, зниження втрат та нижчого нагріву. Набір ізольованих електричних обмоток, які розміщуються всередині пазів магнітного шляху, що ламінує. Площа поперечного перерізу цих обмоток має бути досить великою для потужності двигуна. Для трифазного двигуна потрібні 3 набори обмоток, по одному для кожної фази. 
Це може включати ніжки або фланець для монтажу. . Це обертова частина двигуна.
Рис. 4. Криві залежності питомої потужності, що намагнічує, від номінальної потужності асинхронних двигунів при різних значеннях синхронної частоти обертання:
1 - п,«>1000 об/хв; 2- «1-1500 об/хв; 3 - «1=3000 об/хв
Перехід від залежностей, наведених на рис. 3, до залежностей на рис. 4 виробляють з використанням наступних співвідношень:
(7)
де Show, Qhom - повна та реактивна потужності двигуна при номінальному навантаженні.
Зі порівняння рис. 3 і 4 неважко зробити висновок про вплив коефіцієнта потужності на енергетичні показники двигунів і системи живлення: у двигунів з підвищеним коефіцієнтом потужності при даному номінальному навантаженні (Рг=Рном) реактивна намагнічує потужність менше. Це призводить до зменшення повної потужності і, відповідно, зменшення струму, споживаного з мережі.
Як і у випадку статора вище, ротор складається з набору сталевих щілинних ламінатів, спресованих у вигляді циліндричного магнітного шляху і електричного ланцюга. Електричний ланцюг ротора може бути. Тип ротора рани, який включає 3 комплекти ізольованих обмоток із сполуками, виведеними на 3 скоби, встановлені на валу. Тип ротора з корпусом перекидача, який містить набір мідних або алюмінієвих стрижнів, встановлених у пазах, які з'єднані з кільцем торцевим на кожному кінці ротора. Алюмінієві роторні стрижні зазвичай відкидаються в отвори ротора, що призводить до дуже міцної конструкції. Незважаючи на те, що стрижні ротора знаходяться в безпосередньому контакті зі сталевими пластинами, практично весь струм ротора протікає через алюмінієві стрижні, а не шари.
- Зовнішні з'єднання з частиною, що обертається, виконані за допомогою щітки на скоби.
- Отже, цей тип двигуна часто називають двигуном ковзання.
- Конструкція цих роторних обмоток нагадує білу клітку.
В результаті електричні втрати в обмотках машини зменшуються та обмежується падіння напруги у проводах системи електропостачання.
ФЕДЕРАЛЬНЕ АГЕНТСТВО З ОСВІТИ
«МАТИ» - РОСІЙСЬКИЙ ДЕРЖАВНИЙ
ТЕХНОЛОГІЧНИЙ УНІВЕРСИТЕТ
ІМ. К.Е. ЦІОЛКОВСЬКОГО
Кафедра "Електроніка та інформатика"
Як працюють асинхронні двигуни

Асинхронний двигун - це електродвигун із змінним струмом. Тому ми називаємо двигун. Цей тип двигуна також відомий як асинхронний двигун. Асинхронний двигун заснований на струмах, індукованих у магнітному полі, що обертається. Ось чому він називається індукційною машиною. Щоб мати можливість індукувати один у роторі, необхідно, щоб ротор зазнавав зміни магнітного потоку, що генерується за частотою енергії або синхронності, він розмагнічується, коли він досягає синхронізму, оскільки він не бачить зміни магнітного потоку.
ТРИФАЗНІ АСИНХРОНІ ДВИГУНИ
Методичні вказівки до лабораторної роботи з курсу:
«Електроніка та електротехніка»
Упорядник: Марченко О.Л.
МОСКВА 2005
МЕТА РОБОТИ
Зняти та побудувати механічну та робочі характеристики трифазного асинхронного двигуна (АТ); вивчити моделі АТ та дослідити їх роботу у перехідних режимах.
Тому двигун обертається з іншою швидкістю з поля і тому асинхронно обертається. Асинхронні або асинхронні двигуни, що є надійними і дешевшими, є двигунами, що найчастіше використовуються в галузі. У цих двигунах обертальне поле має синхронізацію швидкості відповідно до частоти лінії електропередачі.
Асинхронний двигун є найпоширенішим типом електродвигуна. Зокрема, трифазний асинхронний двигун є типом двигуна, що найбільш широко використовується в промисловості. Цей успіх пояснюється переважно такими причинами.
ТЕОРЕТИЧНІ ПОЛОЖЕННЯ І РОЗРАХУНКОВІ ФОРМУЛИ
1. ПРИСТРІЙ І ПРИНЦИП ДІЇ ПЕКЛА
Найбільше застосування у промисловості отримали трифазні асинхронні двигуни (рис. 19.1). Це пояснюється тим, що вони прості за конструкцією, дешеві, надійні в роботі, мають високий ККД при номінальному навантаженні, витримують значні навантаження, не вимагають складних пускових пристроїв.
Н  поряд з перевагами АТ мають ряд недоліків, основними з яких є: низький коефіцієнт потужності (cos
) при неповному навантаженні (при холостому ході cos
0
= 0,2 ... 0,3); низький ККД при малих навантаженнях; малозадовільні регулювальні характеристики.
поряд з перевагами АТ мають ряд недоліків, основними з яких є: низький коефіцієнт потужності (cos
) при неповному навантаженні (при холостому ході cos
0
= 0,2 ... 0,3); низький ККД при малих навантаженнях; малозадовільні регулювальні характеристики.
Про 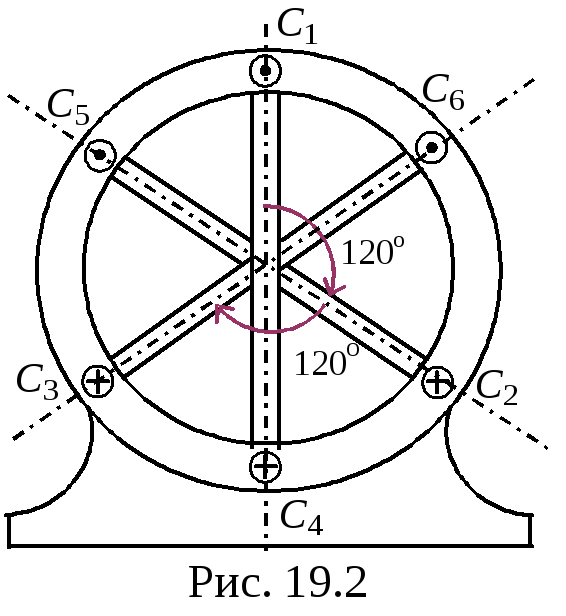 Основними частинами АТ є статор і ротор, віддалені один від одного повітряним зазором (0,3 ... 0,5 мм). Їхні сердечники зібрані з листів електротехнічної сталі. На внутрішній частині поверхні статора і на зовнішній ротора виштамповані пази, в які укладені обмотки. Сердечник статора поміщений у корпус, на якому закріплені клеми обмотки статорної, що складається з трьох самостійних обмоток, зрушених у просторі на 120 (рис. 19.2). Сердечник ротора укріплений безпосередньо на валу двигуна або на маточці, одягненої на вал.
Основними частинами АТ є статор і ротор, віддалені один від одного повітряним зазором (0,3 ... 0,5 мм). Їхні сердечники зібрані з листів електротехнічної сталі. На внутрішній частині поверхні статора і на зовнішній ротора виштамповані пази, в які укладені обмотки. Сердечник статора поміщений у корпус, на якому закріплені клеми обмотки статорної, що складається з трьох самостійних обмоток, зрушених у просторі на 120 (рис. 19.2). Сердечник ротора укріплений безпосередньо на валу двигуна або на маточці, одягненої на вал.
Обмотка ротора може бути виконана короткозамкненою або трифазною аналогічно до обмотки статора. Короткозамкнена обмотка ротора виконується у вигляді "біличого колеса", що складається зі стрижнів і замикають їх на торцях кілець (рис. 19.3, аі б). У АТ з фазним ротором (див. рис. 19.1, в) одні кінці про  бмоток 2
ротора 1
з'єднуються з контактними кільцями 3
, розташованими на валу двигуна, а інші - з'єднані у зірку (рис. 19.3, ві г). Контактні кільця 3
з'єднуються з контактами нерухомої частини машини за допомогою щіток 4
та щіткотримачів. До них підключають пусковий реостат 5.
бмоток 2
ротора 1
з'єднуються з контактними кільцями 3
, розташованими на валу двигуна, а інші - з'єднані у зірку (рис. 19.3, ві г). Контактні кільця 3
з'єднуються з контактами нерухомої частини машини за допомогою щіток 4
та щіткотримачів. До них підключають пусковий реостат 5.
Принцип дії АТ заснований на взаємодії магнітного поля статора, що обертається (нерухома частина машини) з струмами, що індуктуються в роторі (рухлива частина).
Розглянемо принцип створення магнітного поля машини. Трифазна обмотка статора живиться від трифазної системи напруги (див. рис. 19.1, а) з фазною напругою U 1 ф. Оскільки три фазні обмотки (зсунуті у просторі одна щодо іншої на 120 (рис. 19.2) і мають число витків w 1) замкнуті, то в них протікають струми i 1 , в результаті створюються три МДС F 1 = i 1 w 1 . Під дією цих трьох МДС утворюється магнітне поле, що обертається, результуючий вектор магнітного потоку якого Ф р = 3/2Ф m, де Ф m - магнітний потік, створений фазною МДС F 1 .
Відповідно до закону електромагнітної індукції в обмотках статора та ротора наводяться ЕРС е 1 і е 2 . Ланцюг обмоток ротора завжди замкнутий, тому у фазних обмотках ротора протікають струми i 2 значення яких залежать від навантаження. Відповідно до закону Ампера від взаємодії струмів ротора з магнітним полем статора, що обертається, на валу двигуна виникає крутний момент. М, і, якщо він більше моменту опору М зна валу, то ротор приходить у обертання. Відповідно до правила Ленца струми ротора, як і створюване ними магнітне поле, що обертається, впливають на струми статорних обмоток і магнітний потік Ф рмашини, викликаючи ріст струму статора, щоб компенсувати дію, що розмагнічує, струмів роторної обмотки.
Частота обертового магнітного поля статора (об/хв) визначається за виразом:  , де f 1
- частота живлячого двигуна напруги мережі; р- Число пар полюсів машини (зокрема, три обмотки статора створюють одну пару полюсів, шість обмоток - дві пари і т. д.).
, де f 1
- частота живлячого двигуна напруги мережі; р- Число пар полюсів машини (зокрема, три обмотки статора створюють одну пару полюсів, шість обмоток - дві пари і т. д.).
Машина, що розглядається, називається асинхронною тому, що в ній частота обертання ротора. n 2 не дорівнює частоті обертового магнітного поля статора n 1 . Якби ці частоти були рівні, то магнітний потік статора був би нерухомий щодо ротора, що обертається, і в обмотках ротора не індуктувалися б ЕРС, не було б в них струмів і не виникав би крутний момент на валу.
Різниця частот обертання поля статора та ротора називають частотою ковзання n s = n 1 - n 2 , а її ставлення до частоти n 1 - ковзанням S, тобто.
 або (виражене у відсотках)
або (виражене у відсотках) 
Діапазон зміни ковзання в асинхронному двигуні 1 S 0; при пуску S = 1, при холостому ході S= 0,001...0,005, при номінальному навантаженні S = 0,03...0,07.
2. ОСНОВНІ ХАРАКТЕРИСТИКИ ПЕКЛА
Однією з основних характеристик АТ є механічна характеристика n 2 = f(М) – залежність частоти обертання n 2 від моменту Мна валу двигуна (рис. 19.4). Природна механічна характеристика 1 (див. рис. 19.4 та рис. 19.5) асинхронного двигуна описується рівнянням


При збільшенні навантаження на валу ковзання Sзбільшується, а частота обертання ротора знижується на 5...10%, тобто механічна характеристика n= ¦ ( M) АТ є жорсткою (див. рис. 19.4);
Зміна напрямку обертання ротора АТ - реверсування - здійснюється перемиканням будь-яких двох проводів трифазної системи, що живить двигун.
Обертальний момент АТ пропорційний квадрату фазної напруги U 1 ф мережі та залежить від ковзання S, тобто.

де m 1 – число фаз статора; Х До
=
X 1
+ ;
R 1 ,
X 1 і
;
R 1 ,
X 1 і  ,
, - активний, індуктивний опір обмотки статора та наведені опори обмотки ротора.
- активний, індуктивний опір обмотки статора та наведені опори обмотки ротора.
При збільшенні моменту опору М зна валу збільшується ковзання, що призводить до зростання крутного моменту до величини М з. Ковзання, при якому момент досягає максимального значення М max, називається критичним і знаходиться за виразом S кр  /Х До .
/Х До .
Величини критичного ковзання S крта пускового моменту М пзалежить від опору ланцюга ротора (див. криві 2
…4
на рис. 19.5), причому момент М пзростає зі збільшенням  досягаючи М maxпри
досягаючи М maxпри  +
+
Х До, де
Х До, де  - наведений опір пускового реостату, що використовується в АТ з фазним ротором для зниження пускового струму, збільшення пускового моменту (див. криву 4
на рис. 19.5, б), забезпечення плавності пуску та регулювання частоти обертання ротора (див. реостатні механічні характеристики 2
…4
на рис. 19.5, б).
- наведений опір пускового реостату, що використовується в АТ з фазним ротором для зниження пускового струму, збільшення пускового моменту (див. криву 4
на рис. 19.5, б), забезпечення плавності пуску та регулювання частоти обертання ротора (див. реостатні механічні характеристики 2
…4
на рис. 19.5, б).
3 . РОБОЧІ ХАРАКТЕРИСТИКИ ПЕКЛА
. РОБОЧІ ХАРАКТЕРИСТИКИ ПЕКЛА
 Експлуатаційні властивості асинхронного двигуна можна оцінити за робочими характеристиками, що зображуються кривими, що виражають графічні залежності від корисної потужності. Р 2 величин: струму I 1 в обмотці статора, ККД
ковзання S, коефіцієнта потужності cos
, корисного моменту M
на валу АТ при U 1
=
const
і f 1
=
const(Рис. 19.6). Їх визначають експериментально чи шляхом розрахунку, використовуючи схему заміщення асинхронного двигуна.
Експлуатаційні властивості асинхронного двигуна можна оцінити за робочими характеристиками, що зображуються кривими, що виражають графічні залежності від корисної потужності. Р 2 величин: струму I 1 в обмотці статора, ККД
ковзання S, коефіцієнта потужності cos
, корисного моменту M
на валу АТ при U 1
=
const
і f 1
=
const(Рис. 19.6). Їх визначають експериментально чи шляхом розрахунку, використовуючи схему заміщення асинхронного двигуна.
При холостому ході потужність Р 2 = 0; при цьому струми обмоток статора I 0 , Що створюють обертове магнітне поле, досить великі і становлять 30 ... 50% номінальних струмів I 1 н. Частота обертання ротора n 20 = = (0,995…0,998) n 1 .
У міру зростання навантаження на валу струм статора збільшується, як і активні потужності Р 2 та Р 1 . У свою чергу, збільшується коефіцієнт потужності  . При цьому ковзання Sзбільшується, а частота обертання валу n 2 зменшується, оскільки це єдина причина збільшення струму та обертового електромагнітного моменту.
. При цьому ковзання Sзбільшується, а частота обертання валу n 2 зменшується, оскільки це єдина причина збільшення струму та обертового електромагнітного моменту.
Залежність М = f(Р 2) визначається формулою М = 9550Р 2 /n 2 , з якої випливає, що ця залежність представляє дещо викривлену пряму, яка проходить через початок координат, оскільки зі збільшенням навантаження на валу частота обертання ротора АТ дещо зменшується.
Характер залежності коефіцієнта потужності АТ від потужності на валу, тобто cos
=
f(Р 2), визначається виразом cos
= Р 1 / і дорівнює 0,8 ... 0,89 для нормальних АТ середньої потужності за номінального навантаження. Зі зменшенням навантаження на валу cos
знижується і сягає значень 0,2...0,3 при холостому ході. У цьому режимі корисна потужність на валу дорівнює нулю, проте двигун споживає потужність із мережі, тому cos
0
тут не дорівнює нулю.
і дорівнює 0,8 ... 0,89 для нормальних АТ середньої потужності за номінального навантаження. Зі зменшенням навантаження на валу cos
знижується і сягає значень 0,2...0,3 при холостому ході. У цьому режимі корисна потужність на валу дорівнює нулю, проте двигун споживає потужність із мережі, тому cos
0
тут не дорівнює нулю.
Характеристика коефіцієнта корисної дії h = f(Р 2) АТ наростає дуже швидко від нуля (холостий хід) до 0,4 ... 0,5 номінального навантаження і досягає найбільшого значення (0,85 ... 0,95.) В межах від 0,7 до 0,8 номінального навантаження а потім повільно падає внаслідок зростання змінних втрат (див. рис. 19.6).
4. КОРОТКИЙ ОПИС МОДЕЛЕЙ ПЕКЛА
ЗАВДАННЯ ТА МЕТОДИЧНІ ВКАЗІВКИ ДО ЇХ
ВИКОНАННЯ
Завдання 1. Ознайомитись з інтерфейсом моделі випробування АТ (рис. 19.7), уточнивши призначення вікон (полів), у т. ч. з стрілками для зміни, наприклад, моменту опору на валу, опору пускового реостату, вибору схеми з'єднання обмоток статора, а також вікон вихідних величин, що імітують показання вимірювальних приладів.
Згідно з варіантом Nвибрати тип двигуна (для непарних варіантів з табл. 1 АТ з короткозамкненим ротором, а для парних - з табл. 2 АТ з фазним ротором, де N– збігається з номером запису прізвища студента у навчальному журналі групи), записати у звіт його номінальні дані: номінальну механічну потужність Р н = Р 2 нна валу, лінійна напруга живлення U н та його частоту f 1 , номінальний струм I н, номінальну частоту обертання валу n н, ККД н, номінальний коефіцієнт потужності cos н, кількість пар полюсів рмагнітного поля статора, що обертається.
Завдання 2. Здійснити "пуск у хід" АТ (запустити програму моделювання та розрахунку параметрів АТ) та "зняти" механічну та робочі характеристики АТ. З цією метою:
Клацнути мишею на кнопці "Пуск", тобто "підключити" обмотки статора АТ до трифазної мережі змінного струму та записати в рядок 1 табл. 19.1 значення лінійної напруги U 1 , лінійного струму I 1 , активної потужності Р 1 , "споживаної" АТ з мережі, частоти обертання ротора n 2 у режимі холостого ходу (корисний момент на валу М= 0), що виводяться у відповідних полях на екрані дисплея;
- "зняти" механічну n 2 = f(M) та робітники I 1 = f(Р 2), cos = f(Р 2), S = f(Р 2), Р 1 = f(Р 2), M= f(Р 2), h = f(Р 2) характеристики двигуна.
Для зняття характеристик необхідно:
Клацнути мишею на кнопці "Увімк. навантаження", розміщеної внизу робочого поля моделі АТ, тобто "підключити" ланцюг обмотки збудження електромагнітного гальма до мережі;
Ступінчасто збільшуючи момент опору (навантаження) Мна валу АТ, записати у табл. 19.1 показання "вимірювальних приладів" при 8...9 значення моменту М: від режиму холостого ходу ( М = 0, Р 2 = 0) до значення М = (1,2...1,5)М набо Р 2 = (1,2...1,5)Р 2 н .
Таблиця 19.1
|
вимірювання |
Результати вимірів |
Результати обчислень |
|||||||
Спостереження за зміною навантаження на валу можна вести як за значенням моменту М, так і за значеннями потужності Р 1, споживаної АТ з мережі. Наприклад, для асинхронного двигуна з параметрами: Р 2 н = 0,55 кВт, h н = 0,705 та Р 1 н = Р 2 н /h н= 0,55/0,705 = 0,78 кВт зміни потужності будуть від Р 0 (потужність при холостому ході) до Р 1 = 1,1 ... 1,15 кВт.
Завдання 3. За даними моделювання процесів у АТ розрахувати корисну потужність P 2 на валу, ковзання S, коефіцієнт потужності cos та ККД hдвигуна при різних навантаженнях, скориставшись такими розрахунковими формулами:

 = Р 2 /Р 1; cos
= Р 1 /
= Р 2 /Р 1; cos
= Р 1 / ,
,








")
























