Машини змінного струмуподіляються на синхронні та асинхронні. Група асинхронних машин представлена практично головним чином трифазними асинхронними двигунами, найпоширенішими з усіх типів двигунів. З огляду на трифазна асинхронна машина може працювати і в режимі генератора, що має місце в гальмівних режимах. Однак, використання асинхронних машин як генераторів у зв'язку з ускладненнями, що виникають при їх роботі в цьому режимі та безперечними перевагами синхронних генераторів, не застосовується. Однофазні асинхронні двигуни набули свого поширення лише у вигляді двигунів малої потужності. Синхронні машини змінного струму набули найбільшого поширення як трифазні генераториВ основному це все генератори на сучасних електричних станціях. Трифазні синхронні двигуни отримали переважно застосування як привод потужних виробничих машин.
Асинхронна машина- така машина, в якій перетворення енергії здійснюється за допомогою обертового магнітного поля, Що збуджується змінним струмом частотою , що надходить з мережі. Основним принципом роботи є те, що ротор обертається зі швидкістю n 2 відрізняється від швидкості обертання магнітного поля n 1 називається синхронною швидкістю двигуна. У більшості ж синхронних двигунівмагнітне поле створюється системою трьох фазного струму. При роботі як двигун ротор обертається повільніше, ніж магнітне поле. Якщо ротор за допомогою первинного двигуна обертається швидше, ніж магнітне поле, машина є генератором. Як у режимі двигуна, так і в режимі генератора швидкість обертання ротора асинхронної машини залежить від навантаження.
Нерухома частина машини - статор, складається із сталевого осердя і розташованих на ньому трьох обмоток, осі яких зсунуті на кут 120 0 одна щодо іншої, підключені до джерела трифазного струму. Сердечник статора має форму порожнистого циліндра, вздовж утворюють внутрішньої поверхні якого, зроблені пази. У діаметрально протилежних пазах статора укладено сторони трьох котушок обмотки. У порожнині статора розташований ротор, що являє собою циліндричний сердечник, діаметрально протилежних пазах якого, укладені короткозамкнуті витки. Якщо котушки статора з'єднати між собою в зірку або трикутник, то симетричний трифазний ланцюг живлення створює в магнітній системі машини магнітне поле, що обертається.
При обертанні магнітного поля струмів статора зі швидкістю n 1 , У провідниках ротора наводиться ЕРС. Під дією ЕРС в короткозамкнених витках ротора виникнуть струми, що взаємодіють з магнітним полем, що обертається. Ця взаємодія виявиться у виникненні електромагнітних сил, що діють на ротор. Якщо електромагнітні сили, що діють на нерухомий ротор, перевищують гальмівні зусилля на його валу, він отримає прискорений рух у напрямку обертання магнітного поля. У міру зростання швидкості обертання ротора відносна швидкість руху його провідників у рівномірно обертовому полі зменшується, внаслідок чого зменшується і величина струму в них. Процес зміни струму і швидкості обертання ротора припинитися, як тільки настане стійка рівновага між моментом електромагнітних сил, що викликають обертання ротора, і гальмівним моментом, що створюється пристроєм, що рухається електричною машиною. У цих умовах ротор машини буде обертатися з постійною швидкістюі в його короткозамкнутих контурах встановляться струми, що забезпечують створення моменту, що обертає, рівного гальмівному. Таким чином, принцип роботи асинхронних двигунів заснований на взаємодії магнітного поля, що обертається з струмами, які наводяться цим полем у провідниках ротора.
Однією з найважливіших величин, що характеризують роботу асинхронного двигуна, є ковзання ротора, під яким розуміють ставлення:
де – частота обертання ротора;
Частота обертання магнітного поля;
Число пар полюсів двигуна.
Для більшості сучасних типівасинхронних двигунів ковзання ротора при номінальному навантаженні укладено в межах 2-6%.
За відсутності навантаження, коли двигун працює вхолосту, і обертанню ротора перешкоджають лише незначні сили тертя, ковзання дуже мало і не перевищує десяту частку відсотка. Зі збільшенням навантаження швидкість обертання ротора зменшується, а ковзання і обертальний моментвідповідно збільшуються. Однак збільшується струм у роторі та втрати електричної енергії.
Електромагнітні процесив асинхронному двигуні аналогічні процесам, що відбуваються у трансформаторі. Обмотку статора двигуна можна як первинну обмотку трансформатора, а обмотку ротора - як вторинну. Особливістю двигуна в порівнянні з трансформатором є те, що в його статорній та роторній обмотках діють ЕРС та струми різних частот.
Величини цих ЕРС визначаються за формулами:
де - ЕРС обмотки статора,
ЕРС обмотки нерухомого ротора,
І - відповідно обмотувальні коефіцієнти обмоток статора та ротора,
І - число обмоток статора та ротора,
Основний магнітний потік,
Частота струму ланцюга,
Частота ЕРС ротора. З цього співвідношення випливає, що частота ЕРС ротора пропорційна ковзанню.
При нерухомому роторі, тобто частота струму і ЕРС ротора дорівнює частоті ЕРС і струму статора і дорівнює частоті напруги живлення. Векторна діаграма в цьому режимі, що називається холостим ходом, аналогічна відповідній векторної діаграмитрансформатор.
ЕРС у роторі , що обертається .
Індуктивний опір ротора, що обертається:
Активний опір ротора залежить від частоти.
За законом Ома струм у роторі дорівнює:
 .
.
Електрична потужність, підведена до двигуна з мережі ![]() , Перетворюється в ньому на механічну. Перетворення енергії супроводжується втратами. Частина підводиться потужності витрачається на втрати сталі машини - і втрати в міді статора, тобто. на нагрівання обмотки статора. Решта потужність електромагнітним шляхом передається на ротор і називається електромагнітною потужністю. Частина потужності. Переданої на ротор, витрачається на нагрівання міді обмоток ротора і залежить від ковзання
, Перетворюється в ньому на механічну. Перетворення енергії супроводжується втратами. Частина підводиться потужності витрачається на втрати сталі машини - і втрати в міді статора, тобто. на нагрівання обмотки статора. Решта потужність електромагнітним шляхом передається на ротор і називається електромагнітною потужністю. Частина потужності. Переданої на ротор, витрачається на нагрівання міді обмоток ротора і залежить від ковзання ![]() . Решта потужності називається повною механічною потужністю. Якщо з повної механічної потужності відняти механічні втрати та додаткові втрати, то вийде корисна потужність на валу двигуна.
. Решта потужності називається повною механічною потужністю. Якщо з повної механічної потужності відняти механічні втрати та додаткові втрати, то вийде корисна потужність на валу двигуна.
ККД асинхронного двигуна:
 де .
де .
Розмір ККД асинхронних двигунів становить від 0,7 до 0,9 і від.
Механічна потужність ротора:
![]() ,
,
де - крутний момент двигуна.
Електромагнітна потужність магнітного поля, що обертається:
![]() .
.
Основні режими роботи асинхронного двигуна
1) пуск двигуна в хід,
2) холостий хіддвигуна,
3) робочий режим двигуна, зокрема режим при повному номінальному навантаженні.
Робочий режим двигуна при номінальному навантаженні характеризується різними номінальними параметрами для кожного асинхронного двигуна. Основним номінальним параметром асинхронного двигуна є його номінальна потужність. Ця потужність виражається в кіловатах і відповідає найбільшій механічній потужності на валу двигуна, яка може бути корисно віддана механізму, що приводиться двигуном в обертання. Робота двигуна з навантаженням, що перевищує його номінальну потужність, розглядається як перевантаження і тому довго не допустима.
Другим параметром двигуна є його номінальна швидкість обертання.
Важливим електричним параметромє напруга, для якого призначений двигун. Номінальний струмдвигуна встановлюється, виходячи з номінальної потужностідвигуна та номінальної напруги. До номінальних параметрів відносять також номінальний коефіцієнт потужності двигуна. ,
При пуску двигуна з короткозамкненим роторомшвидкість обертання ротора в перший момент, чому відповідає максимальне ковзання, двигун знаходиться в режимі короткого замикання. Струм у роторі має найбільше значенняі найбільше зрушення фаз по відношенню до ЕРС. При цьому пусковий струм статора в 4-10 разів більший за номінальний. Пусковий момент становить 0,9 - 1,8 від номінального моменту. У міру розгону двигуна величина пускового струмушвидко зменшується. Велика величина пускового струму викликає різкі коливання напруги в мережі, що погано відбивається на роботі інших споживачів. При включенні двигунів у потужні енергосистеми ці коливання нівелюються, тому використовується прямий пуск - включенням статора обмотки на повну напругу ланцюга. Для зменшення пускового струму асинхронних двигунів з короткозамкненим ротором застосовують способи, що дозволяють знизити на час пуску напругу, що підводиться до статора: перемикання статора обмотки з зірки на трикутник, запуск двигуна через автотрансформатор, включення додаткового опору в обмотку статора. При запуску двигуна через автотрансформатор зменшення пускового струму ланцюга відбудеться в раз, де - коефіцієнт трансформації автотрансформатора. Однак недоліком цих способів є зменшення пускового моменту, величина якого пропорційна квадрату напруги: .
Асинхронний двигун з фазним роторомпускається в хід за допомогою пускового реостата, послідовно включеного з обмоткою ротора.
Пускові якості двигунів характеризуються коефіцієнтами кратності пускового струму та пускового моменту.
Для частоти обертання двигуна використовуються:
1) зміна частоти обертання магнітного поля (частоти напруги живлення),
2) перемикання пар полюсів,
3) зміна активного опір фазного ротора за допомогою трифазного реостату, що включається так само як пусковий.
У синхронному двигуні
частота обертання двигуна дорівнює частоті обертання магнітного поля: ![]() .
.
Основними характеристиками синхронного двигуна є кутова, механічна та регулювальна. Кутова характеристика визначає залежність крутного моменту від кута між ЕРС та напругою:
де - кут між векторами ЕРС та напруги, тобто. ,
Повний індуктивний опір двигуна.
На спеціальних електростанціях, що покривають пікові навантаження в енергосистемах, синхронна машина працює генератором у години максимуму навантаження і двигуном - в решту часу, перекачуючи за допомогою гідротурбіни, яка тепер стає насосом, воду у водосховище, створюючи необхідний запас для подальшої роботи. Такі агрегати називають оборотними.
Важливо система синхронної машини така ж, як у машин змінного струму. Синхронна машина так само складається з двох частин: нерухомої частини - статора і частини, що обертається - ротора і має дві обмотки. Одна обмотка підключається до джерела постійного струму та створює основне магнітне поле машини. Це обмотка збудження. Інша обмотка є обмоткою якоря і складається з однієї, двох чи трьох фаз. В обмотці якоря індукується основна ЕРС машини. У синхронних машинах найбільшого поширення набула конструкція, коли обмотка якоря розташовується на статорі, а обмотка збудження - на роторі.
Особливістю синхронних машин є те, що ротор повинен бути розкручений до моменту приєднання змінного струму, при цьому повинні виконуватися такі умови: змінний струм, що протікає через статорну обмотку, повинен бути таким, щоб його взаємодія з магнітним полем постійного струму створювало силу необхідного напрямку, інакше , замість підтримувати обертання, електромагнітне взаємодія йому перешкоджати.
Тому для приєднання синхронної машини до мережі необхідно не тільки надати обертанню ротора потрібну швидкість, але й переконатися, що хід зміни напруг на машині та в мережі однаковий.
Синхронні машини повинні обертатися із певною швидкістю. Зменшення швидкості хоча б на 1% призводить до того, що зміни струму в обмотці змінного струму перестають відповідати змінам у положенні обмотки постійного струму, вони як би випадають із такту, машина випадає з синхронізму: обмотка постійного струму піддається зусиллям, спрямованим то в одну, то в інший бік, і машина зупиняється.
Синхронні двигуни та синхронні генератори влаштовані абсолютно однаково. У кожному синхронному двигуні, приведеному в обертання, починає наводитися ЕРС, якщо в його обмотці збудження протікає струм.
Для того щоб збільшувати або зменшувати напругу синхронного генератора, потрібно змінювати величину постійного струму, при цьому буде змінюватися величина магнітного потоку, чим більше магнітний потік, що змінюється, тим більше буде і напруга, що наводиться в машині (зрозуміло, при сталості інших умов).
Постійний струм, що створює магнітне поле в синхронній машині, називають струмом збудження. Чим більший струм збудження, тим більше напруга, що наводиться в машині.
Машини змінного струму призначені для перетворення механічної енергії на електричну (генератори) або для перетворення електричної енергії на механічну (двигуни).
Вони поділяються на:
Асинхронні
Синхронні
У перших частота обертання магнітного поля відрізняється від частоти обертання ротора, а в других – ні.
Асинхронні та синхронні МПТ бувають:
З короткозамкненим ротором
З фазним ротором
Залежно від кількості фаз вони поділяються на однофазні, двофазні та трифазні.
78. Пристрій, принцип дії та характеристики трифазних асинхронних двигунів.
Основними частинами АТ є нерухомий статор і ротор, що обертається, розділені повітряним зазором.
Статорскладається з алюмінієвого або чавунного корпусу, всередині якого знаходиться сердечник статора - порожнистий циліндр із ізольованих один від одного листів електротехнічної сталі. На внутрішній поверхні цього циліндра в пазах розміщена трифазна обмотка з трьох однакових частин, званих фазами. Фази обмотки з'єднуються зіркою або трикутником і підключаються до трифазної мережі.
Роторявляє собою циліндричний сердечник із ізольованих один від одного листів електротехнічної сталі з пазами на зовнішньої поверхні, В яких розміщуються провідники обмотки ротора. Обмотка короткозамкнутого ротора виконується у вигляді білизного колеса – циліндричної клітини з мідних або алюмінієвих стрижнів, які без ізоляції закладаються у пази ротора. Торцеві кінці стрижнів замикають коротко з обох боків ротора кільцями.
Принцип дії АТполягає в наступному: при живленні обмотки статора від мережі трифазний струм статора створює магнітне поле, що обертається, пронизує сердечник статора, ротор і повітряний зазор. Магнітне поле, що обертається, перетинає провідники ротора і наводить в них ЕРС, під дією яких у провідниках ротора виникають струми. Взаємодія струмів ротора з магнітним полем, що обертається, створює крутний момент М, під дією якого ротор обертається.
Для АТ виділяють такі види характеристик: механічні та робочі. Механічною характеристикоюназивається залежність частоти обертання ротора від навантаження. Робочими характеристиками називають залежності частоти обертання n, моменту на валу М 2 струму статора I 1 коефіцієнта корисної дії і коефіцієнта потужності cos від корисної потужності P 2 .
79. Режими роботи, механічні та робочі характеристики трифазних асинхронних двигунів.
Режими роботи двигуна: тривалий, короткочасний, повторно короткочасний.
Механічною характеристикою називається залежність частоти обертання ротора від моменту на валу. Від її характеру залежить придатність артеріального тиску для приводу різних механізмів. Робочими характеристиками називають залежності частоти обертання n, моменту на валу М 2 струму статора I 1 коефіцієнта корисної дії і коефіцієнта потужності cos від корисної потужності P 2 . Ці характеристики служать повного виявлення властивостей самого двигуна. Робочі характеристики зображені малюнку.
80. Енергетична діаграма та К.П.Д. трифазних асинхронних двигунів
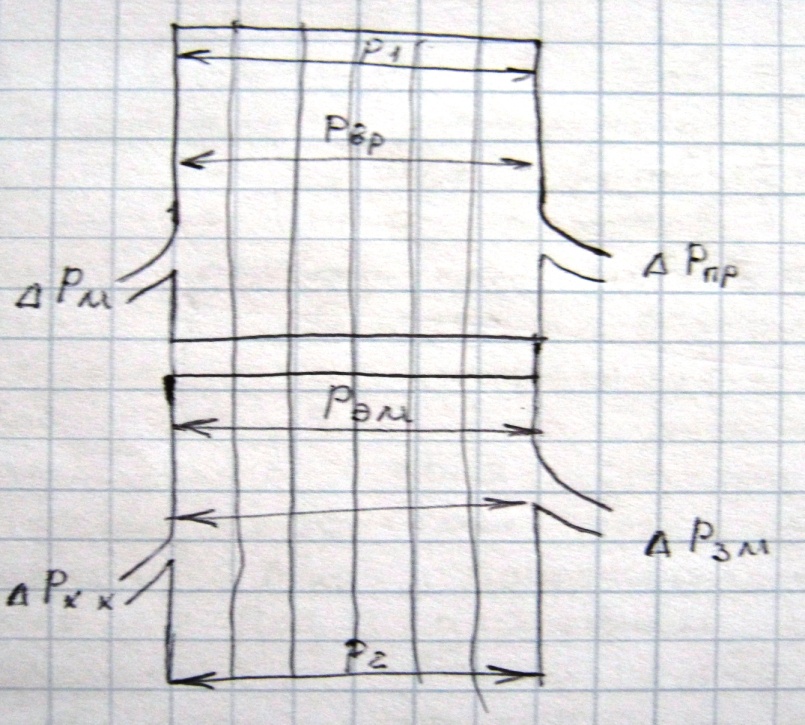 Вихідна величина - це потужність Р1 = U1I1cosφ1, що підводиться до двигуна з мережі 3-х фазного струму. Частина цієї потужності Рпр1 йде на нагрівання провідників обмотки статора. Решта потужності Рврп = Р1 - ΔРпр1 перетворюється на потужність магнітного поля, що обертається. З неї частина потужності Рм витрачається на втрати в магнітопроводі. Ці втрати складаються із втрат на гістерезис та втрат на вихрові струми. Втрати в осерді ротора практичної роліне грають, т.к. вони пропорційні f2 а f2 дуже мало. Таким чином, ротору через повітряний зазор передаються електромагнітна потужність Рем = Рврм - Рм. Механічна потужність, що передається ротору Рм = Рем - ΔРпр2, де ΔРпр2 - це потужність втрат в обмотці ротора і корисна потужність на валу ротора Р2 = Рмех - ΔРмех - ΔРдоб, де ΔРмех - механічні втрати, ΔРдоб - додаткові втрати. ККД двигуна η = Р2 / Р1 = Р2 / (Р2 + ΔРс + ΔРе), де ΔРс - постійні втрати. ΔРс = ΔРм + ΔРміх. ΔРе – змінні втрати. ΔРе = ΔРпр1 + ΔРпр2.
Вихідна величина - це потужність Р1 = U1I1cosφ1, що підводиться до двигуна з мережі 3-х фазного струму. Частина цієї потужності Рпр1 йде на нагрівання провідників обмотки статора. Решта потужності Рврп = Р1 - ΔРпр1 перетворюється на потужність магнітного поля, що обертається. З неї частина потужності Рм витрачається на втрати в магнітопроводі. Ці втрати складаються із втрат на гістерезис та втрат на вихрові струми. Втрати в осерді ротора практичної роліне грають, т.к. вони пропорційні f2 а f2 дуже мало. Таким чином, ротору через повітряний зазор передаються електромагнітна потужність Рем = Рврм - Рм. Механічна потужність, що передається ротору Рм = Рем - ΔРпр2, де ΔРпр2 - це потужність втрат в обмотці ротора і корисна потужність на валу ротора Р2 = Рмех - ΔРмех - ΔРдоб, де ΔРмех - механічні втрати, ΔРдоб - додаткові втрати. ККД двигуна η = Р2 / Р1 = Р2 / (Р2 + ΔРс + ΔРе), де ΔРс - постійні втрати. ΔРс = ΔРм + ΔРміх. ΔРе – змінні втрати. ΔРе = ΔРпр1 + ΔРпр2.
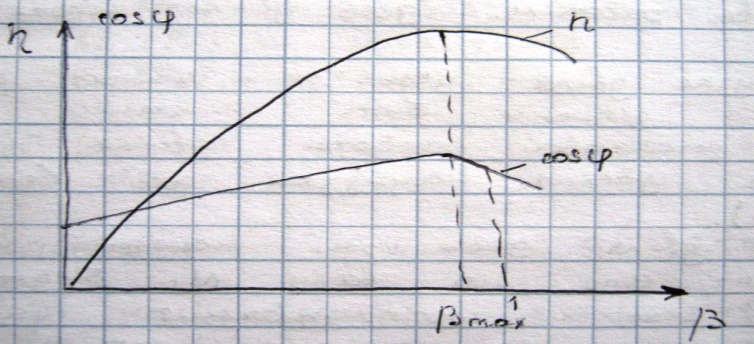
ККД двигуна змінюється залежно від навантаження двигуна. Коефіцієнт навантаження β = Р2/Р2ном. З урахуванням коефіцієнта навантаження η = βР2/(βР2 + ΔРс + β 2 ΔРе).
Графік залежності ККД від β
 Зазвичай ККД = 0,75 - 0,95.
Зазвичай ККД = 0,75 - 0,95.
Зі зростанням навантаження cosφ = P1 / S1 = P1 / (P1 2 + Q1 2) 0.5 = 1 / (1 + (Q1 2 / P1 2)) зростає, т.к. зростає Р1, а Q1 залишається незмінною. При подальшому зростанні β зростає потік розсіювання магнітного потоку, тому зростає Q1, а cos зменшується. АТ доцільно використовувати при навантаженнях, близьких до номінальних (β = 1).
81. Способи регулювання швидкості трифазних асинхронних двигунів.
Запишемо формулу для визначення швидкості обертання:  .
.
Частоту обертання асинхронного двигуна можна регулювати зміною ковзання, числа пар полюсів і частоти струму мережі живлення.
1. Зміни ковзання можна досягти 3 способами:
1.1. зміною підводиться до статора симетричного напруги U 1 ;
При незмін. На момент валу двигуна підвищення напруги викликає підвищення частоти обертання двигуна, але діапазон зміни частоти виходить невеликим, що пояснюється вузькою зоною стійкої роботи двигуна. Крім того, отже. збільшення напруги викликає перегрів двигуна, а зниження напруги знижує перевантажувальну здатність  .
.
1.2. порушенням симетрії цієї напруги;
Порушення симетрії напруги, що підводиться здійснюється за допомогою автотрансформатора, включеного в одну з фаз. При зменшенні напруги на вході автотрансформатора напруга виході автотрансформатора несиметрично збільшується, а частота обертання зменшується. Недоліками є зменшення ККД двигуна та вузька зона регулювання. Застосовується для АТ невеликої потужності.
1.3. зміною активного опору ланцюга ротора.
Застосовується для АТ із фазним ротором.
2. Регулювання частоти обертання зміною частоти струму мережі живлення (частотне регулювання).
Для цього необхідні джерела живлення з регульованою частотою струму, як яких застосовуються напівпровідникові та електромагнітні перетворювачі частоти. Але зі зміною частоти струму змінюється і електромагнітний момент двигуна, тому збереження моменту, коефіцієнта потужності і ККД двигуна необхідно одночасно змінювати і напруга мережі. Якщо регулювання здійснюється за умови постійного навантаження, то напругу потрібно змінювати пропорційно до частоти. Частотне регулювання дозволяє плавно змінювати швидкість обертання широкому діапазоні.
3. Зміна частоти обертання шляхом зміни числа пар полюсів.
Цей спосіб застосовується лише для АТ із короткозамкненим ротором і дає лише ступінчасте регулювання частоти. Зміна числа пар полюсів проводиться двома способами:
1) у пази статора укладаються дві обмотки з різним числомпар полюсів, не пов'язаних електрично між собою. Включаючи різні обмотки в мережу, одержують різні частоти обертання. Недоліками методу є: збільшення габаритів та маси АТ;
2) у пазах статора розміщена одна обмотка, схема якої шляхом перемикання дозволяє зменшити кількість пар полюсів, наприклад, обмотка фази складається з двох котушок, при їх послідовному з'єднанні=2, а при паралельному =1. Початки та кінці обмоток виводять на клеми щитка, тому перемикання може здійснюватися при працюючому двигуні.
82. Схеми керування трифазними асинхронними двигунами.
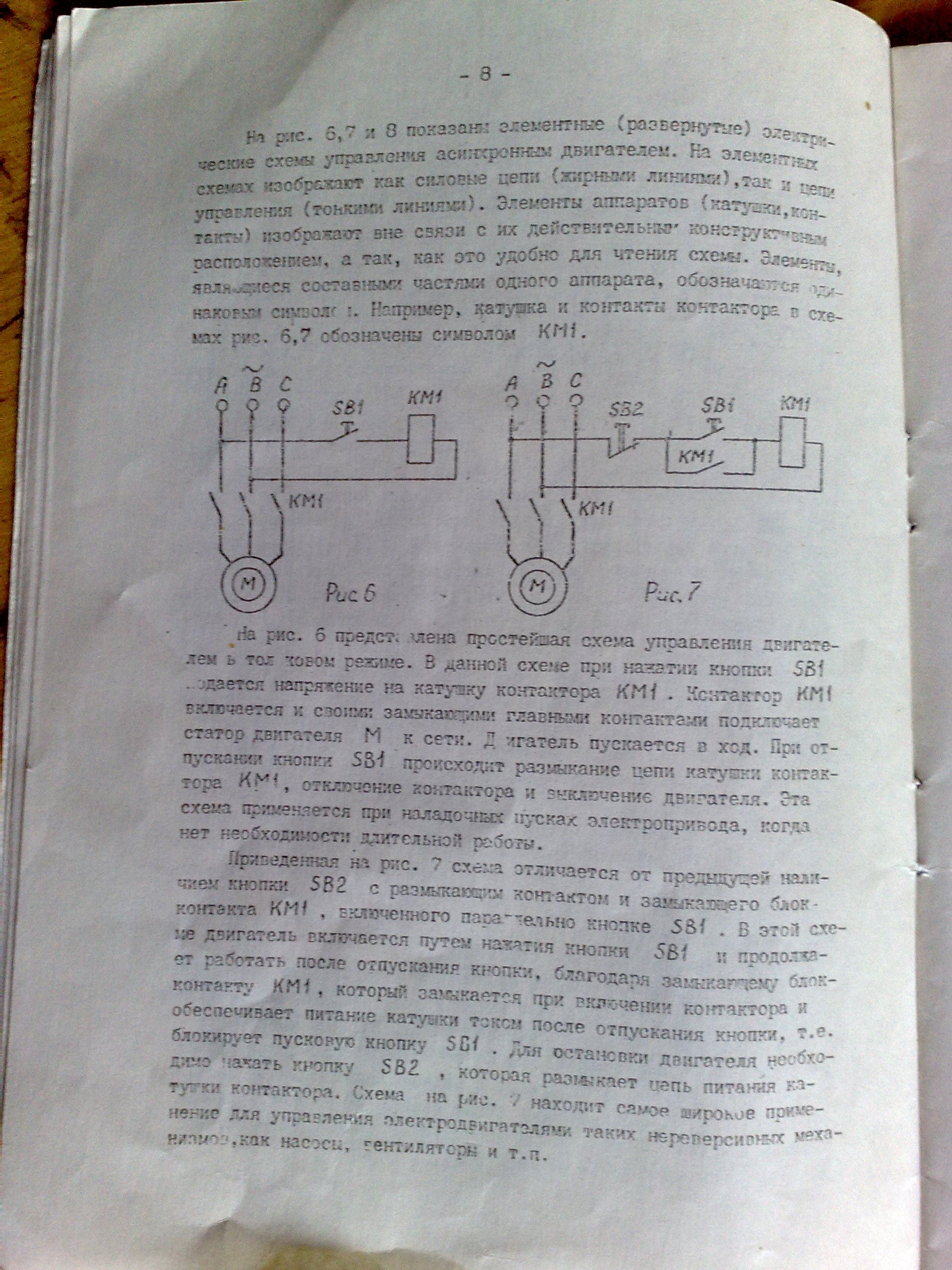 Найпростіша схемакерування двигуном. У цій схемі при натисканні кнопки SB1 подається напруга на котушку контактора KM1. Контактор KM1 вмикається і своїми головними контактами, що замикають, підключає статор двигуна M до мережі. Двигун пускається у хід. При відпусканні кнопки SB1 відбувається розмикання ланцюга котушки контактора KM1, відключення контактора та вимкнення двигуна. Ця схема застосовується при налагоджувальних пусках електроприводу, коли не потрібно тривалої роботи.
Найпростіша схемакерування двигуном. У цій схемі при натисканні кнопки SB1 подається напруга на котушку контактора KM1. Контактор KM1 вмикається і своїми головними контактами, що замикають, підключає статор двигуна M до мережі. Двигун пускається у хід. При відпусканні кнопки SB1 відбувається розмикання ланцюга котушки контактора KM1, відключення контактора та вимкнення двигуна. Ця схема застосовується при налагоджувальних пусках електроприводу, коли не потрібно тривалої роботи.
У цій схемі двигун включається шляхом натискання кнопки SB1 і продовжує працювати після відпускання кнопки завдяки замикаючому блок-контакту KM1, який замикається при включенні контактора і забезпечує живлення котушки струмом після відпускання кнопки, тобто. блокує кнопку пуску SB1. Для зупинки двигуна необхідно натиснути кнопку SB2, яка розмикає ланцюг живлення котушки контактора. Ця схема знаходить найширше застосування керувати електродвигунами таких нереверсивних механізмів, як насоси, вентилятори тощо.
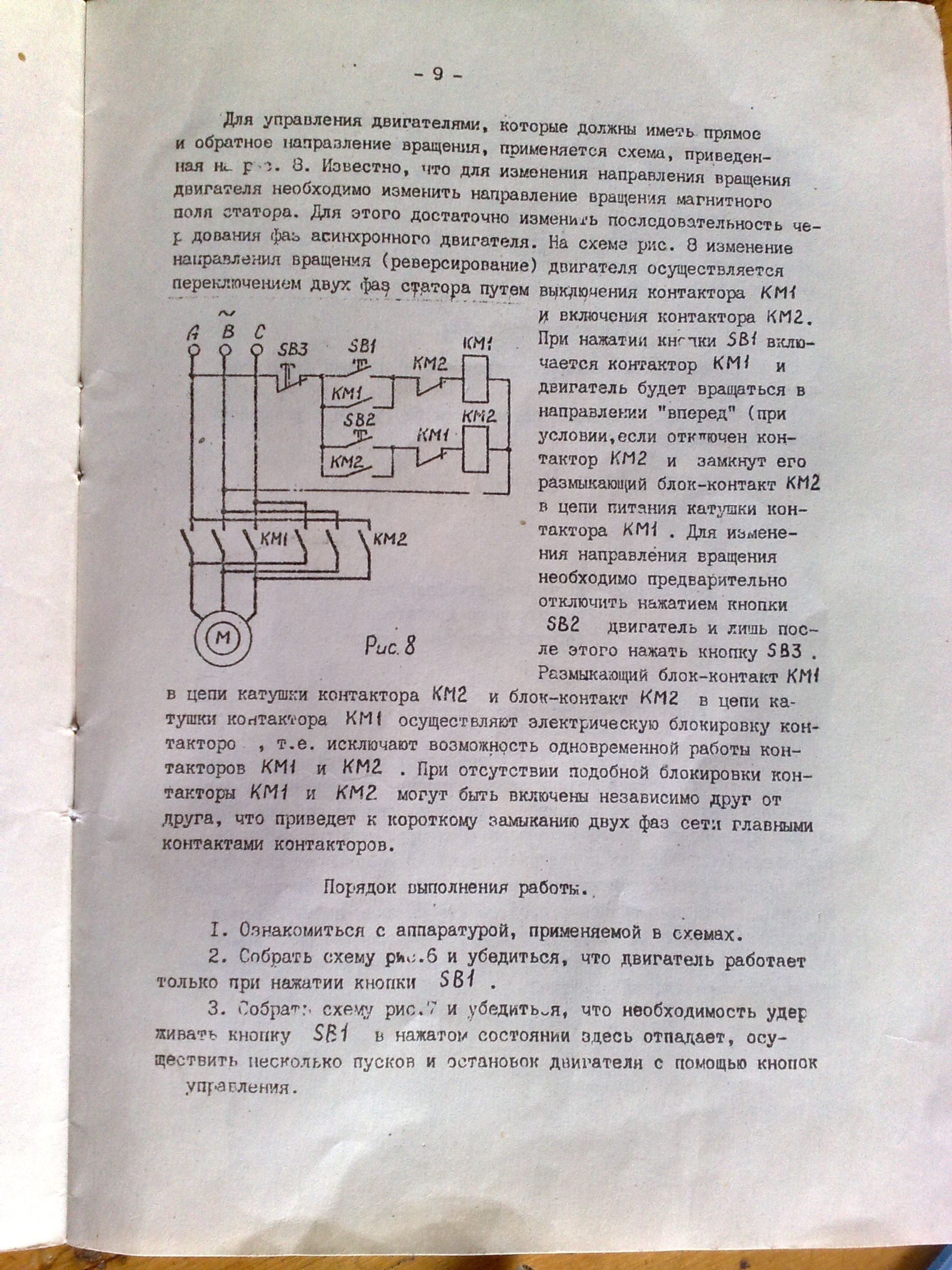 Дана схема застосовується для управління двигунами, які повинні мати прямий та зворотний напрямок обертання ротора. У цій схемі зміна напрямку обертання двигуна здійснюється перемиканням двох фаз статора шляхом вимкнення контактора KM1 та включення контактора КМ2. При натисканні кнопки SB1 вмикається контактор KM1 і двигун буде обертатися в напрямку «вперед» (за умови, якщо контактор KM2 вимкнено і замкне його блок-контакт KM2, що розмикає, в ланцюгу живлення котушки контактора KM1). Для зміни напрямку обертання необхідно попередньо вимкнути натисканням кнопки SB2 двигун і після цього натиснути кнопку SB3. Розмикаючий блок-контакт КМ1 у ланцюзі котушки контактора КМ2 і блок-контакт КМ2 у ланцюзі котушки контактора КМ1 здійснюють електричне блокування контакторів, тобто. виключають можливість одночасної роботи контакторів КМ1 та КМ2. За відсутності даного блокування контактори КМ1 та КМ2 можуть бути включені незалежно один від одного, що призведе до короткому замиканнюдвох фаз мережі головними контактами
Дана схема застосовується для управління двигунами, які повинні мати прямий та зворотний напрямок обертання ротора. У цій схемі зміна напрямку обертання двигуна здійснюється перемиканням двох фаз статора шляхом вимкнення контактора KM1 та включення контактора КМ2. При натисканні кнопки SB1 вмикається контактор KM1 і двигун буде обертатися в напрямку «вперед» (за умови, якщо контактор KM2 вимкнено і замкне його блок-контакт KM2, що розмикає, в ланцюгу живлення котушки контактора KM1). Для зміни напрямку обертання необхідно попередньо вимкнути натисканням кнопки SB2 двигун і після цього натиснути кнопку SB3. Розмикаючий блок-контакт КМ1 у ланцюзі котушки контактора КМ2 і блок-контакт КМ2 у ланцюзі котушки контактора КМ1 здійснюють електричне блокування контакторів, тобто. виключають можливість одночасної роботи контакторів КМ1 та КМ2. За відсутності даного блокування контактори КМ1 та КМ2 можуть бути включені незалежно один від одного, що призведе до короткому замиканнюдвох фаз мережі головними контактами
Електричні машини, як і інші пристрої також можна класифікувати. Класифікують електричні машини за призначенням, принципом дії та роду струму, потужністю, частотою обертання.
Класифікація за призначенням
Електричні машини за своїм призначенням поділяють на:
- Електромашинні генератори. Вони виконують перетворення механічної енергії (обертання) в електричну. Вони встановлюються на електричних станціях, автомобілях, літаках, тепловозах, пересувних електростанціях, кораблях та інших установках. На рухають потужні парові турбіни, на автомобілях, тепловозах та інших транспортних засобах– газові турбіни чи двигуни внутрішнього згоряння. Генератори дуже часто використовують як джерела живлення в різних установках зв'язку, автоматики та вимірювальної техніки та в інших системах.
- Електричні двигуни - виконують функції зворотні генератору, а саме, перетворюють електричну енергію на механічну. Вони використовуються для приведення в рух безлічі установок у промисловості, сільському господарстві, транспорт, у побуті, в системах зв'язку. Вони активно використовують як регулюючих, програмуючих і виконавчих органів.
- Електромашинні перетворювачі виконують перетворення електричних величин. Наприклад, можуть перетворювати постійний струм на змінний і навпаки, змінювати частоту, число фаз та інші функції. У зв'язку з активним використанням напівпровідникових перетворювачів електромашинні перетворювачі в нових проектах використовують вкрай рідко (практично ніколи), а вже встановлені електромашинні перетворювачі активно модернізуються напівпровідниковими (тиристорними та транзисторними).
- - Здійснюють регулювання коефіцієнта потужності cos φ, а саме балансу реактивної потужності в мережі.
- Електромашинні підсилювачі використовують для об'єктів великої потужності. Це, свого роду підсилювачі, вони посилюють сигнали великої потужності, причому управління ведеться сигналами малої потужності. Роль цих підсилювачів, як і електромашинних компенсаторів, сучасному світіпрактично зведена нанівець через застосування напівпровідникових підсилювачів (транзисторних і тиристорних).
- Електромеханічні перетворювачі сигналів – це, як правило, електричні мікромашини (наприклад, сельсини), які досить широко використовують у системах автоматичного керування.
Класифікація за родом струму та принципом дії
Як відомо, існує два роди електричного струму – змінний та постійний. Виходячи з цього, електричні машини також поділяють за родом струму на два види машини електричні змінного струму і електричні машини постійного струму.
Електричні машини змінного струму
У свою чергу електричні машини змінного струму поділяють на:
- Трансформатори - найбільш широко застосовні в мережах електропостачання для перетворення напруг (підвищення та зниження). Також досить широко їх застосовують у випрямлювальних установках для узгодження напруги, у пристроях зв'язку, обчислювальної техніки та автоматики. Часто застосовуються і для проведення вимірювань електричних ( вимірювальні трансформатори), а також для різних функціональних перетворень (трансформатори, що обертаються).

- Асинхронні електродвигуни – найпоширеніші у світі завдяки своїй відносній простоті та низькій вартості. Простота конструкції та висока надійність дозволяє застосовувати їх не тільки у промислових електроустановках (верстати, крани, підйомні машини), а й у побутових (компресора холодильників, вентилятори, пилососи). Досить широке застосування отримали однофазні та двофазні асинхронні керовані електродвигуни, а також сельсини та асинхронні тахогенератори.

- Синхронні електродвигуни – найчастіше використовуються як генератори електричного струму на електричних станціях. Також застосовні як генератори підвищеної частоти в різних джерелах живлення (наприклад, на кораблях, тепловозах, літаках). Також в електроприводах великої потужності застосовують синхронні електродвигуни, які можуть також окрім виконання корисної роботитакож впливати на коефіцієнт потужності мережі cos φ. Щодо електроприводів малої потужності, то там досить широке поширення набули реактивні синхронні електродвигуни, крокові, індукторні, з постійними магнітами та інші.
- - Використовують їх відносно рідко і часто тільки як електродвигуни. Це викликано складністю їхньої конструкції, а також у необхідності досить ретельного догляду за ними. У побутових електроприладівта пристроях автоматики застосовуються універсальні колекторні електродвигуни, здатні працювати на двох родах струму – постійному та змінному.
Електричні машини постійного струму
Нещодавно були вони найпопулярнішими в регульованому електроприводі через простоту управління ними. Вони працюють практично у всіх сферах промисловості та транспорту. Через підвищену вартість та вимогливість в обслуговуванні активно витісняються частотно-регульованими електроприводами змінного струму.
У зв'язку з великим поширенням машин постійного струму також поширені і генератори постійного струму. Вони використовувалися як джерела постійної напругидля заряджання акумуляторних батарей, на транспорті (тепловози, теплоходи та інші), а також у промисловості (). Зважаючи на розвиток напівпровідникової техніки генератори постійного струму поступово витісняються з роботи та активно замінюються на генератори змінного струму, що працюють у парі з напівпровідниковим перетворювачем.
Також застосовуються електродвигуни постійного струму та в системах автоматичного управління АСУ як підсилювачі електромашинних, тахогенераторів та виконавчих електродвигунів.
Електричні мікромашини
Мікромашини активно застосовуються в автоматичних пристроях. Відповідно їх поділяють на групи:
- Силові мікродвигуни - обертають механізми різних автоматичних пристроїв. Наприклад, самопишучі пристрої та інші.

- Виконавчі (керовані) мікромашини – виконують перетворення енергії електричної на механічну, тобто ведуть обробку певних команд з зовні.
- Тахогенератори – перетворять механічну енергію обертання валу електричний сигнал напруги, який пропорційний швидкості обертання валу.
- Трансформатори, що обертаються, - на виході цих трансформаторів встановлюється напруга, пропорційна функції куту повороту ротора, наприклад синусу або косинусу даного кута або самому куту.
- Машини синхронного зв'язку (магнесини або сельсини) здійснюють синфазний і синхронний поворот або обертання декількох осей, що не мають між собою механічного зв'язку.
- Мікромашини гіроскопічних приладів - обертають ротори гіроскопів з досить високою частотою, а також коректують їх положення.
- Електромашинні підсилювачі та перетворювачі.
Машини перших двох груп часто називають силовими, а електродвигуни третьої – п'ятої груп інформаційними.
Класифікація за потужністю
Також електричні машини класифікують ще й за потужністю. І за потужністю їх поділяють на:
- Мікромашини – їх потужність може змінюватись від кількох часток вата до 500 Вт. Вони можуть проводитися для двох пологів струму – постійного та змінного. Можуть бути розраховані як на роботу за нормальної (промислової) частоти 50 Гц, так і при підвищеній (від 400 до 2000 Гц).
- Електродвигуни малої потужності від 0,5 до 10 кВт. Також можуть виготовлятися для двох пологів струму – постійного та змінного нормальної та підвищеної частоти.
- Електродвигуни середньої потужності – від 10 кВт до кількох сотень ват.
- Електродвигуни великої потужності – потужність цих машин більше кількох сотень кіловат. Такі електродвигуни призначені для роботи на постійному та змінній напрузінормальної частоти. Виняток можуть становити електродвигуни спеціального призначення (авіація, флот) та інші.

Класифікація за частотою обертання
Умовно їх поділяють на:
- До 300 об/хв – тихохідні.
- Від 300 до 1500 об/хв – середньої швидкохідності.
- Від 1500 до 6000 об/хв – швидкохідні.
- Понад 6000 об/хв – надшвидкохідні.
Мікромашини можуть виготовляти з частотою обертання валу від кількох обертів на хвилину до 60 000 обертів на хвилину. Швидкість обертання машин середньої та великої потужності, як правило, не перевищує 3000 об/хв.
Машини змінного струму бувають двох видів. Це синхронні машини та асинхронні. У синхронних машин швидкість обертання ротора залежить від частоти змінного струму. Можна сказати швидкість обертання "синхронна" із частотою струму. Не важко здогадатися, що у асинхронних машин частота обертання в загальному випадкузалежить від навантаження на валу, а не від частоти струму живлення.
Крім розподілу на синхронні та асинхронні електричні машини ще діляться за призначенням. Це можуть бути генератори. Тобто така машина, яка перетворює механічну енергію обертання на змінний електричний струм. Машина, яка перетворює електричну енергію на механічну називається двигуном. Також існує ще один клас електричних машин. Вони перетворюють електричну енергію, теж електричну, але інший частоти чи напруги.
Синхронною машиною змінного струму називають таку машину, в якій: основне магнітне поле тобто поле статора створюється постійним струмом. В окремому випадку це може бути навіть постійний магніт. А обертання ротора відбувається із частотою зміни струму.
Формула 1 – залежність частоти обертання ротора синхронної машини від частоти змінного струму.
де n це частота, з якою обертається ротор, вимірюється в обертах за хвилину. Тобто скільки повних оборотів зробить ротор за одну хвилину.
f частота живлення змінного струму
p кількість пар полюсів у магнітної системи машини
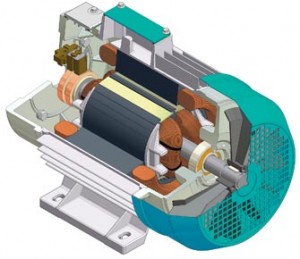
Малюнок 1 - Синхронна машина в розрізі
Синхронні машини здебільшого застосовуються як електродвигуни та генератори змінного струму. Перетворювачі частоти їх, зазвичай, не роблять. Основною перевагою синхронної електричної машини є те, що в ній легко регулювати швидкість обертання валу. Тому їх часто застосовують у системах автоматики.
Асинхронна машина це машина, в якій основне магнітне поле статора створюється змінним електричним струмом. А швидкість обертання валу не пов'язана жорсткою залежністю з частотою струму живлення. Асинхронні машиниділяться на колекторні та без колекторні. Колекторні машини застосовуються вкрай рідко, оскільки вони дорожчі у виробництві, а надійність їх нижча. Асинхронні електричні машини найчастіше використовуються як електродвигуни.
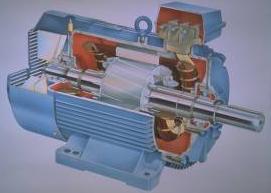
Рисунок 2 - Приклад асинхронної електричної машини
Будь-яка машина хоч синхронна хоч асинхронна здатна працювати в обох режимах. Тобто, як електродвигун, так і генератор змінного струму.
Машини змінного струму пристрою трохи відрізняються від машин постійного струму. Кожна машина складається здвох основних частин: нерухомої частини, званої статором, і частини, що обертається, званої ротором. На відміну від машин постійного струму машин змінного струму на статорі укладають обмотку якоря, а на роторі - обмотку збудження. Замість колектора на роторі є ізольовані кільця, якими струм проводиться в обмотку збудження. Машини змінного струму бувають синхронні та асинхронні.
Си н х р о н н ы м і називаються такі машини змінного струму, частота обертання яких визначається частотою струму. Зі зміною частоти струму таких машин одночасно (синхронно) змінюється частота обертання. Як правило, у синхронних машин з обмотки збудження проходить постійний струм від стороннього джерела. Синхронні машини оборотні, тобто можуть працювати як генератори та електродвигуни. Конструкція синхронного двигуна майже відрізняється від конструкції синхронного генератора.
Так як на суднах морського флоту ланцюги змінного струму живляться від трифазних синхронних генераторів, то зупинимося на їхньому пристрої та принципі роботи.
Обмотка якоря трифазного синхронного генератора розташовується в статорі і складається з трьох окремих обмоток-фаз, зрушених відносно один одного на 120°С (1/3 періоду) з таким розрахунком, щоб індукція е. д. с. у кожній фазі досягала свого максимуму через 1/3 періоду після максимуму е. д. с. сусідньої фази. Обмотку збудження укладають на роторі, і джерелом живлення для неї може бути невеликий генератор постійного струму (збудник), змонтований на одному валу з синхронним генератором, або навіть акумуляторна батарея.
Обмотки статора з'єднуються між собою зіркою або трикутником, при цьому у зовнішній ланцюг від обмотки статора відходять три дроти (три контакти). На рис. 167 дані схема і поздовжній розріз синхронного генератора трифазного змінного струму з збудником.
Обмотки статора з'єднуються між собою зіркою або трикутником, при цьому у зовнішній ланцюг від обмотки статора відходять три дроти (три контакти). На рис. 167 дано схема і поздовжній розріз синхронного трифазного генератора.змінного струму з збудником.
Ротор складається з сердечників полюсів 1, котушки обмотки збудження 2, живлюваної постійним струмом через контактні кільця 5. Статор складається з активної сталі якоря 3, службовця магіїтопроводом, та станини 6, службовця для кріплення сталі якоря та встановлення машини на фундамент. Активна сталь якоря набирається з листів спеціальної сталі завтовшки 0,5 або 0,35 мм. Листи ізолюються з обох боків спеціальним лаком. Обмотка 4 укладається в пазах, що виштамповані в сталі статора.
На рис. 168, апоказано розміщення трифазної обмоткистатора (на одній четвертій його частині), а на схемах б і в- з'єднання обмотки статора трикутник і в зірку.
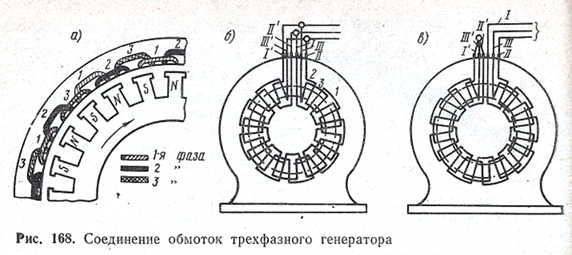
При з'єднанні в трикутник початок першої фази I з'єднується з кінцем II, початок II - з кінцем III і, нарешті, початок III - з кінцем I. залишаються вільними, та доним приєднується зовнішній ланцюг, в який подається електрична енергія, що виробляється генератором.
Синхронні трифазні генератори є нині основними джерелами електричної енергії як у берегових, і на суднових електричних станціях будь-якої потужності.
В даний час на морських суднах набули широкого поширення синхронні генератори, у яких обмотка збудження живиться струмом статора, попередньо випрямленим за допомогою випрямлячів. Схема збудження цих машин забезпечує таку зміну струму збудження, у якому напруга на висновках генератора підтримується практично незмінним. Такі генератори називаються синхронними генераторами із самозбудженням та саморегулюванням напруги.
Конструкція синхронного двигуна принципово відрізняється від конструкції синхронного генератора. Для того щоб синхронний генераторзмусити працювати в режимі двигуна, потрібно відключити первинний двигун і до обмоток фаз статора підвести трифазний струмз ланцюга. В цьому випадку генератор стане синхронним електродвигуном, що споживає струм. Проходячи по обмотках фаз, змінний трифазний струм створює магнітне поле, що обертається, яке, взаємодіючи з електромагнітом ротора, захоплює його в бік свого обертання. В результаті ротор буде обертатися з такою ж частотою, як і магнітне поле, що обертається, при цьому він не зупиниться, навіть якщо дати йому навантаження, з'єднавши з яким-небудь механізмом. У цьому полягає сутність роботи синхронного електродвигуна.
Регулювання частоти обертання ротора синхронного двигуна проводиться зміною частоти струму ланцюга, а зміна напрямку обертання ротора - перемиканням двох будь-яких фаз, тобто взаємним переєднанням двох дротів живлення. До недоліків синхронних двигунів відноситься те, що при пуску їх доводиться розвертати стороннім механізмом до частоти обертання, що забезпечує магнітне поле, що обертається, статора.
Для усунення цього недоліку застосовують асинхронний пуск синхронних електродвигунів, який у тому, що з пуску через спеціальні обмотки ротора перепускають змінний струм від ланцюга.








")
























