Как было показано ранее, наиболее распространенная задача управления – поддержание заданных законов изменения во времени параметров объекта (регулирование). Устройство, осуществляющее управляющее воздействие, называется регулятором. Регуляторы включают в себя простые динамические звенья, комбинируя которые добиваются требуемых переходных характеристик системы управления при случайных воздействиях и изменении нагрузки. При этом входным параметром для регулятора является один или несколько показателей работы объекта:
В зависимости от того, как формируется управляющее воздействие, различают законы управления и соответствующие им регуляторы:
релейные, реализующие нелинейный двухпозиционный закон управления
пропорциональные (статические, или устройства с жесткой обратной связью)
интегральные (астатические, устройства без обратной связи)
пропорционально-интегральные, (изодромные, или устройства с исчезающей обратной связью)
пропорционально-дифференциальные (статические устройства с предварением)
пропорционально-интегрально-дифференциальные (изодромные устройства с предварением).
Применительно к установкам с ДВС релейный закон управления реализуется в системах регулирования давления и уровня, с помощью двухпозиционного реле включаются и отключаются насосы и компрессоры. Чтобы избежать слишком частых пусков и остановок механизмов устанавливается определенный интервал между значениями управляемого параметра, соответствующего включению и отключению реле (зона нечувствительности).
Остальные законы управления реализуются в основном в регуляторах скорости.
График регулирования по релейному закону представлен на рис. 23.
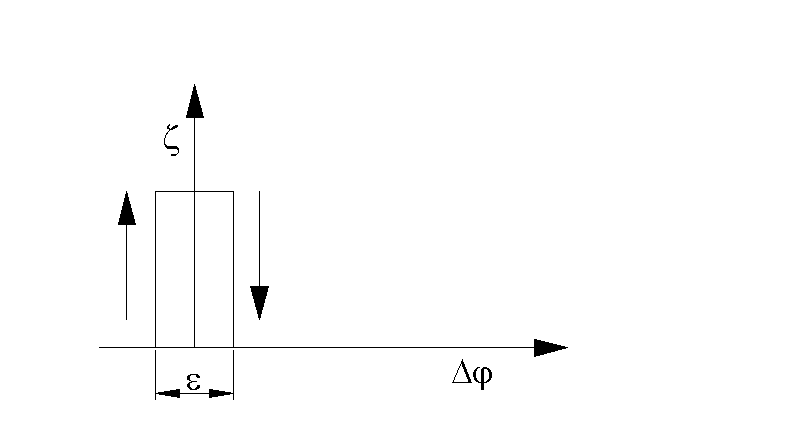
Пропорцинальные регуляторы вырабатывают управляющее воздействие в виде линейной зависимости от отклонения от отклонения регулируемого параметра:
где k p – коэффициент усиления по регуляторному каналу.
Зависимость управляющего воздействия от отклонения регулируемого параметра показана на рис.24.
Так как в установившемся режиме определенной нагрузке должно соответствовать определенное положение регулирующего устройства, невозможно осуществлять регулирование во всем диапазоне нагрузок без определенной ошибки, называемой статизмом регулятора:
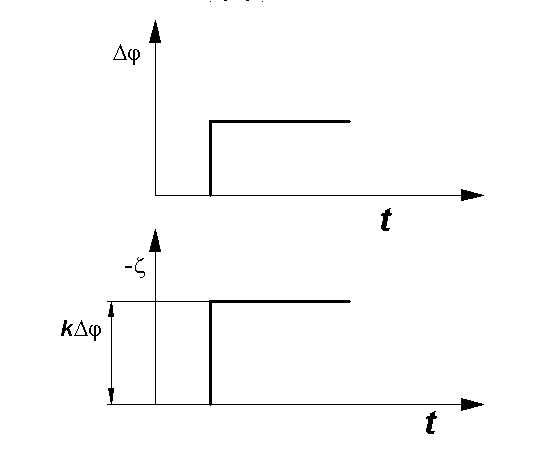
Интегральные регуляторы реализуют закон управляющего воздействия в виде формулы:
 ,
,
где Т и – время интегрирования.
Интегральный регулятор может использоваться как предельный выключатель, предохраняющий систему от выхода за установленные допустимые пределы отклонения регулируемой величины в случае возникновения неисправности.
Всережимные регуляторы должны обеспечивать изменение регулируемой величины во всем диапазоне задаваемых значений независимо от нагрузки. В сумматор поступает сигнал по измерительному каналу от фактического значения параметра и по каналу задающего устройства. Чтобы улучшить характеристики переходного процесса при изменении режима или при случайных воздействиях, в регулирующие устройства вводят интегральное или дифференциальное звено или оба этих звена, работающих поочередно.
В пропорционально-интегральных регуляторах управляющее воздействие описывается уравнением:
 ,
,
где первое слагаемое определяет пропорциональную часть, а второе – интегральную.
В пропорционально-дифференциальных регуляторах управляющее воздействие описывается уравнением:
где Т д – время дифференцирования.
Такие регуляторы позволяют временно увеличить величину управляющего воздействия и сократить время выхода на новый установившийся режим.
В пропорционально-дифференциальных-интегральных регуляторах управляющее воздействие описывается уравнением:
Такие регуляторы позволяют добиться наилучших показателей переходного процесса путем и добиться нулевого отклонения регулируемой величины от заданного значения во всем диапазоне нагрузок.
Все перечисленные виды регуляторов первоначально были реализованы в отечественной промышленности в виде приборов и агрегатов универсальной системы элементов промышленной пневмоавтоматики (УСЭППА). Недостатком этих приборов являлось наличие калиброванных отверстий и каналов малого диаметра, которые могли засоряться при некачественной подготовке рабочей среды (воздуха). В настоящее время применяются электронные регуляторы, в которых операции дифференцирования и интегрирования выполняются с помощью электронных схем и микропроцессоров.
Ранее существовали другие виды классификации регуляторов.
По способу энергетического воздействия измерительной части регулятора на его исполнительную часть регуляторы делятся на два класса: регуляторы прямого и непрямого действия. На рис.25 а показана блок-схема системы управления с регулятором прямого действия, на рис 25 б – с регулятором непрямого действия.
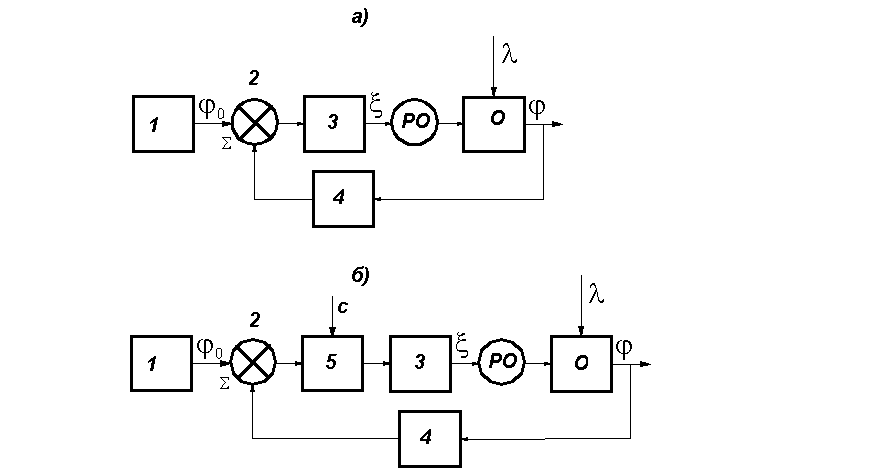
1- элемент задания, 2 – элемент сравнения, 3 – исполнительный механизм, 4 – чувствительный элемент, 5 – усилитель, РО – регулирующий орган, О - объект
Регулятор прямого действия состоит из измерительного устройства, (включающего чувствительный элемент 4, элемент задания 1 и элемент сравнения 2), и исполнительного механизма 4, осуществляющего перестановку регулирующего органа в нужном направлении. Исполнительный механизм должен обладать вполне определенным выходным (или, как принято называть, перестановочным) усилием для перемещения РО. В регуляторе прямого действия необходимое перестановочное усилие вырабатывается чувствительным элементом.
В случае, когда нельзя спроектировать компактный чувствительный элемент, развивающий необходимое усилие, в конструкцию регулятора вводится усилитель 5, использующий дополнительную внешнюю энергию (с) для усиления мощности измерителя. Такой регулятор называется регулятором непрямого действия.
По способу обеспечения задачи регулирования регуляторы делились на следующие классы:
астатические регуляторы
статические регуляторы
программные регуляторы
двухпозиционные регуляторы.
На примерах простейших регуляторов давления можно понять отличие в конструкции статических и астатических регуляторов. На рис. 26 показан астатический регулятор давления.
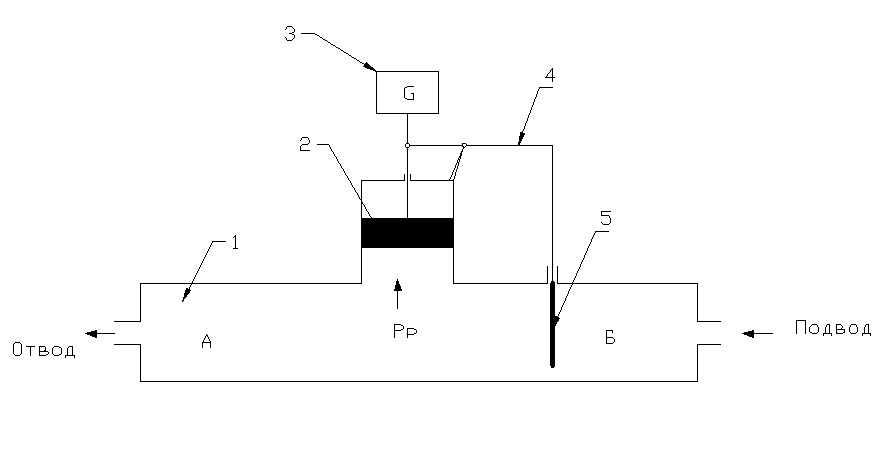
Рис. 26 Астатический регулятор давления
1 – регулируемый объект, 2 – поршень (чувствительный элемент), 3 – груз (элемент задания и элемент сравнения), 4 – передаточный рычаг (исполнительный механизм), 5 – шибер (регулирующий орган)
В потоке газа имеется регулирующее устройство 5 с изменяемым сопротивлением, благодаря которому при переменном давлении на подводе можно поддерживать постоянное давление в полости А. В равновесном режиме имеется баланс между подводом и отводом газа, давление в рабочей полости А соответствует расчетному значению Р р и уравновешивается грузомG. При изменении нагрузки (отвода) баланс нарушается и в зависимости от характера наступившего изменения уменьшается или увеличивается давление в полости А. Поршень (чувствительный элемент начинает перемещаться, открывая или закрывая шибер. Когда вновь будет достигнуто исходное значение Р р, может наступить равновесие при новой нагрузке. Однако получить новое устойчивое равновесие без постоянных колебаний далеко не всегда удается. Это основной недостаток астатических регуляторов.
В статическом регуляторе (рис. 27) элементом задания является верхняя опора пружины 4, элементом сравнения является пружина 3. Величина усилия, действующая на поршень со стороны пружины, меняется в зависимости от положения поршня по высоте. Из-за этого возникает не одно, как в предыдущем случае, а множество равновесных состояний по давлению. Так, если давление Р начало возрастать, поршень, поднимаясь и сжимая пружину, может занять новое положение, при котором возросшему давлению будет отвечать возросшее усилие пружины. Таким образом, статический регулятор с заведомо предусмотренной статической ошибкой. Значение поддерживаемого параметра однозначно связано с величиной нагрузки.
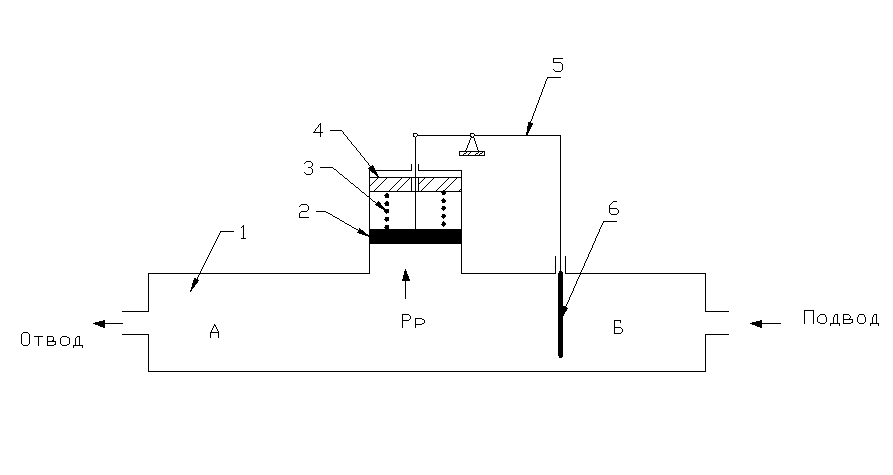
Рис. 27 Статический регулятор давления
1 – регулируемый объект, 2 – поршень (чувствительный элемент), 3 – пружина (элемент сравнения), 4 – верхняя опора пружины (элемент сравнения), 5 - передаточный рычаг (исполнительный механизм), 6 – шибер (регулирующий орган)
В программных регуляторах предусматривается дополнительный конструктивный элемент, изменяющий координату задания, а, следовательно, и регулируемую величину, по определенной функциональной зависимости от нагрузки, от времени или от других величин.
В двухпозиционных регуляторах реализуется релейный закон управления. Регуляторы этого типа работают по принципу включено – выключено.
В холодильной и криогенной технике, а также в системах кондиционирования воздуха, широкое распространение получили промышленные автоматические регуляторы, реализующие различные законы регулирования.
Уравнение регулятора, отображающее закон его регулирования, устанавливает зависимость формирования управляющего (выходного) сигнала U(τ), воздействующего на регулирующий орган РО, от отклонения регулируемой величины Δy (входного сигнала) от заданного значения.
Таким образом, закон регулирования – это вид математической зависимости между выходной и входной величинами регулятора .
Упрощенная структура автоматической системы регулирования приведена на рис. 3.3.
Рисунок 3.3. Функциональная схема АСР
Принцип действия АСР. Регулируемая величина y объекта автоматизации, значение которой в текущий момент времени обозначен y т, поступает на вход элемента сравнения ЭС регулятора и сравнивается с заданным значением y зад . На выходе ЭС формируется сиг-нал рассогласования Δy = y зад - y т , величина которого является исходными данными для формирования управляющего сигнала. По значению Δy и виду закона регулирования, заложенного в усилитель-формирователь УФ, на выходе автоматического регулятора АР формируется сигнал управления U, параметры которого определяют поведение регулирующего органа РО (скорость и величину перемещения).
Входная величина объекта регулирования x (вещество или энергия), влияющая на состояние регулируемой величины y , под воздействием РО, преобразуется в регулирующее воздействие x р , способное скомпенсировать возмущение F , отклонившее регулируемую величину от заданного значения.
По виду управляющего сигнала, законы регулирования подразделяются на дискретные: импульсные (АИ, ШИ, ЧИ) или позиционные (двух-, трех- и многопозиционные), и непрерывные: пропорциональный (П), интегральный (И), дифференциальный (Д), и их комбинации: пропорционально-интегральный (ПИ), пропорционально-диф-ый (ПД) и пропорционально-интегрально-дифференциальный (ПИД). В соответствии с этими законами, непрерывные промышленные регуляторы обозначаются как П-регулятор, ПИ-регулятор, ПД-регулятор и ПИД-регулятор, а дискретные регуляторы получили название: двух-, трех- или многопозиционные регуляторы.
Регуляторы с различными законами регулирования имеют свои, свойственные им, переходные процессы, в результате которых происходит перемещение регулирующего органа и изменение подачи вещества или энергии на объект регулирования.
Пояснение. Для обеспечения требуемого качества технологического процесса в объекте регулирования, в переходном режиме, выбирается тип регулятора и осуществляется расчет его настроечных параметров. Расчет параметров настройки регулятора производится по динамическим показателям объекта регулирования: постоянной времени Тоб и величине запаздывания τоб.
3.1.3.1. Дискретные регуляторы.
Описываются нелинейными законами регулирования и подразделяются на импульсные и позиционные .
Импульсные (дискретные во времени).
У них выходная величина U может принимать любое значение, но только в определенные промежутки времени. В интервалах между импульсами сигнал пропадает. Количество импульсов ограничено на интервале времени ∆Т = - τ 1 .
Характеристика АР с импульсными законами регулирования приведена на рис.3.4.
Рисунок 3.4. Импульсные законы регулирования
Импульсные законы регулирования подразделяются на:
Амплитудно-импульсные (АИ);
Широтно-импульсные (ШИМ);
Частотно-импульсные (ЧИ)
Позиционные (дискретные по уровню).
У них выходной сигналUимеет фиксированное (конечное) число выходных значений (два, три или несколько). Такие законы, а соответственно и регуляторы, называются двух-, трех- и многопозиционными.
Характеристики позиционных законов регулирования приведены на рис. 3.5.
Рисунок 3.5. Позиционные законы регулирования
Под воздействием сигнала у Т , поступающего от датчика, и сформированного сигнала рассогласования ∆у выходной сигнал регулятора U воздействует на регулирующий орган, который может принимать одно из положений, соответствующих U1, U2 ... Un, т.е. они осуществляют ступенчатое регулирующее воздействие.
Наиболее простым и широко используемым позиционным законом регулирования является двухпозиционный закон, у которого выходной сигнал принимает только два установившихся значения 1 или 0.
(Раздел 3. Управление энергетическими объектами на базе дискретных и непрерывных законов
регулирования
Свойства автоматических систем регулирования зависят от свойств объекта и от свойств регулятора. Поэтому при проектировании АСР, учитывая свойства объекта, обосновывают применение того или иного типа регулятора, чтобы система автоматического регулирования была по возможности простой, надежной и имела свойства, удовлетворяющие требованиям эксплуатации в отношении точности поддержания регулируемого параметра и качества переходного процесса.
Таким образом, в зависимости от свойств объекта и эксплуатационных требований к его параметрам выбирается тот или иной тип регулятора и формирующий им закон регулирования.
Настройку систем автоматического регулирования можно осуществить только при знании обслуживающим персоналом теоретических основ автоматического регулирования.
Опубликовано: Март 26, 2012Автоматические регуляторы
Автоматически действующее устройство, предназначенное для регулирования какого-либо параметра объекта, называется автоматическим регулятором.
Автоматические регуляторы могут быть прямого (непосредственного) и непрямого (косвенного) действия (рис. 7).
Автоматическим регулятором прямого (непосредственного) действия называют простейший регулятор, чувствительный (первичный) элемент которого может непосредственно воздействовать на регулирующий (исполнительный) орган без усилительно-преобразующего устройства и дополнительного источника энергии. Такой регулятор работает исключительно за счет энергии самого регулируемого объекта.
Примером автоматического регулятора прямого действия может служить система стабилизации уровня воды в баке (рис. 8,6). Регулируемым объектом является бак 1, регулируемым параметром - высота уровня воды Н. Значение регулируемого параметра зависит от соотношения между величинами поступления воды Qi и ее расхода Q2. Стабилизация этого параметра достигается регулирующим органом - заслонкой 2, управляемой чувствительным элементом - поплавком 5 через рычаг 3 и задатчик 4.
Понижение уровня воды вызывает опускание поплавка, а следовательно, раскрытие заслонки 2, т. е. увеличение поступления воды. При повышении уровня происходит обратный процесс.
Автоматическим регулятором непрямого (косвенного) действия называют такой, в состав которого входит усилительно-преобразующее устройство, питаемое извне от дополнительного источника энергии.
Схема регулятора непрямого действия, предназначенного для регулирования уровня воды в баке 1, приведена на рис. 9,6. Заслонка 2, регулирующая количество поступающей воды Qb управляется чувствительным элементом - поплавком б не за счет энергии воды, а за счет дополнительной электрической энергии, привлекаемой для работы преобразующего органа - потенциометра 4 и усилительного - электродвигателя 3 (привода регулирующего органа).
У рассматриваемого регулятора при среднем положении движка потенциометра, присоединенного к рычагу 5, высота уровня воды равна заданному значению Я, и электродвигатель 3 не работает. При понижении уровня воды поплавок, опускаясь, передвигает ползунок потенциометра в сторону знака плюс, а электродвигатель приоткрывает заслонку 2. При повышении уровня движок перемещается в сторону знака минус, что вызывает вращение электродвигателя в противоположном направлении, а следовательно, прикрытие заслонки.
В зависимости от способа перемещения регулирующего органа автоматические регуляторы могут быть непрерывного и прерывистого действия.
У автоматических регуляторов непрерывного регулирования регулирующий орган занимает, кроме крайних, любое промежуточное положение в зависимости от протекания процесса. Примерами таких регуляторов могут служить приведенные на рис. 8 и 9. У автоматических регуляторов прерывистого регулирования регулирующий орган занимает только два крайних положения (у двухпозиционных) или два крайних и несколько промежуточных (у многопозиционных).
Примером двухпозиционного прерывистого регулятора является автоматический регулятор температуры, приведенный на рис. 6,6. Здесь регулирующий орган (вентиль регулирования- подачи пара) может быть открыт или закрыт, т. е. занимать, только два крайних положения.
Характер протекания процесса непрерывного регулирования- определяется законом регулирования, т. е. зависимостью выходной величины автоматического регулятора от входной.
Закон регулирования определяется управляющим устройством регулятора. По этому признаку автоматические регуля-- торы подразделяются на статические и астатические. Их особенности можно рассмотреть на примере автоматических регуляторов уровня воды (см. рис. 8 и 9).
Статическим или пропорциональным называют такой регулятор, который обеспечивает регулирующее воздействие, пропорциональное отклонению регулируемой величины:
Это воздействие достигается включением в состав регулятора статических элементов и использованием жестких обратных связей. В статическом регуляторе уровня воды, изображенном на рис. 8,6, значение регулируемого параметра не остается постоянным, а зависит от величины возмущающего воздействия. Для поддержания уровня на одной и той же высоте необходимо, чтобы поступление воды равнялось ее расходу Поступление воды зависит от раскрытия заслонки 2, т. е. от положения поплавка 5. Чем больше расход воды, тем больше- должна быть приоткрыта заслонка и тем ниже при установившемся режиме работы регулятора будет находиться поплавок, с уменьшением расхода воды положение поплавка выше. Таким образом, уровеньводы в баке зависит от величины расхода воды т. е. от величины возмущения, и колеблется в некоторых небольших пределах относительно среднего значения.
Работа статического регулятора всегда отличается некоторой постоянной погрешностью. К положительным особенностям его относится малая склонность к колебаниям регулируемого параметра. Статические регуляторы, как более простые по устройству, применяются в тех случаях, когда небольшая погрешность в их работе не оказывает существенного влияния нерегулируемый объект.
В астатическом регуляторе выходная величина у (регулирующее воздействие) пропорциональна интегралу от отклонения регулируемой величины:
В таком регуляторе (см. рис. 9,6) значение регулируемого параметра не зависит от величины возбуждения. В рассматриваемом примере это обеспечивается тем, что между чувствительным элементом - поплавком 6 и регулирующим органом - заслонкой 2 отсутствует жесткая связь. При установившемся режиме и различных значениях расхода Q2 воды заслонка будет занимать разные положения, а поплавок - всегда одно и то же, отвечающее заданному значению H уровня воды в баке.
Астатический регулятор в отличие от статического лишен статической погрешности регулирования. Однако он склонен к колебательным процессам и не всегда устойчив в работе.
Чтобы автоматический регулятор был пригоден для практического использования, необходимо обеспечить устойчивость системы и приемлемое качество регулирования.
Устойчивость системы автоматического регулирования определяется рядом показателей, отображающих характер переходных процессов при регулировании. В специальной литературе приводятся критерии и методы анализа устойчивости регуляторов .
Под качеством процесса регулирования понимают соответствие между заданным и фактическим изменением регулируемого параметра. Обычно это качество определяется следующими показателями:
1) разницей между заданной и фактической величинами регулируемого параметра в установившемся режиме (ошибкой системы); 2) перерегулированием (забросом), т. е. наибольшим отклонением фактической величины параметра от заданной; 3) временем регулирования (быстродействием системы), которое принимается равным продолжительности переходного процесса от его начала до момента, когда регулируемый параметр приобретает величину, близкую (обычно 95-97%) к значению в установившемся режиме; 4) числом колебаний регулируемого параметра в заданное время.
Повысить устойчивость и качество регулирования систем автоматического регулирования можно двумя способами: путем изменения параметров регулируемого объекта или регулятора и путем изменения структурной схемы регулятора. Практически обычно изменяют структурную схему регулятора, для чего вводят дополнительные звенья. Устройства автоматических регуляторов, состоящие из таких звеньев, называются корректирующими. Часто они представляют собой разного рода дополнительные (внутренние) обратные связи.
Из автоматических регуляторов с корректирующими устройствами наиболее распространены изодромный и с воздействием по производной (с предварением).
Таким образом, эти регуляторы обладают хорошими динамическими свойствами статических регуляторов в сочетании с хорошими статическими свойствами (например, отсутствие установившегося отклонения) астатических регуляторов.
Такое сочетание достигается с помощью гибких обратных связей, действующих только во время переходных процессов для затухания колебаний и отсутствующих в установившемся режиме.
Схема изодромного регулятора с гибкой обратной связью в виде катаракта для автоматического регулирования температуры приведена на рис. 10. Температура в камере 18 измеряется термометром сопротивления 17, включенным в одно из плеч измерительного электрического моста 15. В одну из диагоналей моста включена обмотка чувствительного поляризованного реле 9, а питание второй диагонали осуществляется от источника постоянного напряжения. Стабилизируемая температура устанавливается задатчиком 16, который перемещает движок одного из сопротивлений R электрического моста.
При температуре в камере выше заданной реле 9 замыкает контакт 10, включающий обмотку 8 реверсивного двигателя 7 постоянного тока. Двигатель вращает валик 2, соединенный с вентилем 1 паропровода, уменьшая тем самым подачу пара в калорифер 19 камеры.
При понижении температуры в камере направление тока в обмотке поляризованного реле меняется на противоположное и реле замыкает контакт 11, включающий обмотку 6. Двигатель начинает вращаться в обратную сторону, и валик 2 открывает вентиль 1, вследствие чего подача пара в калорифер 19 увеличивается.
Изодромное устройство для улучшения динамической характеристики регулятора осуществлено с помощью катаракта (гидравлического тормоза) 4 с пружиной 5. При вращении валика 2 перемещается рычаг 3, а вместе с ним и катаракт 4 с движком 12 потенциометра 14. Благодаря этому изменяется соотношение между сопротивлениями, включенными в плечи моста 15, и на обмотку реле 9 поступает дополнительный корректирующий сигнал. Жесткая связь рычага 3 с движком 12 существует лишь при быстрых перемещениях рычага в переходных процессах, так как тогда малое отверстие демпфера 13 препятствует переходу масла из одной полости катаракта в другую и шток с цилиндром катаракта перемещается как одно целое. По истечении некоторого времени,когда переходный процесс закончится, пружина 5 катаракта возвращает поршень и движок 12 в исходное положение, пропуская масло через демпфер 13 из одной полости цилиндра катаракта в другую. Таким образом, по окончании процесса регулирования равновесие моста, заданное задатчиком 16, вновь восстанавливается.
Если регулируемый объект отличается большой емкостью (постоянная времени велика), применение изодромного регулятора с гибкой обратной связью не обязательно. В этом случае можно использовать статические регуляторы с жесткой обратной связью (см. пунктир на рис. 10).
Регуляторы с воздействием по производной отклонения осуществляют регулирование по отклонению и его производной, что позволяет учитывать характер изменения регулируемой величины. Поэтому их называют также р е- гуляторами с предварением.
Эта особенность существенна при регулировании быстропротекающих процессов. Закон регулирования таких регуляторов можно выразить уравнением
Регуляторы с воздействием по производной подавляют колебания и повышают быстроту действия системы, улучшая таким образом качество переходных процессов.
Эффект улучшения качества переходных процессов в регуляторах с предварением можно проследить на рис. 11. Предположим, что изменение регулируемого параметра во времени выражается сплошной кривой(рис. 11,а).
Рассмотренный ранее статический пропорциональный регулятор без корректирующих устройств уменьшает рассогласование между заданной и фактической величинами параметров не только пока оно имеется, но и (за счет инерции) некоторое время после его устранения. Поэтому такой регулятор переключается на действие в обратном направлении не в точке В, когда рассогласование равно нулю, а несколько позже, на участке ВС, оказывая некоторое время воздействие, противоположное требуемому.
Регулятор с предварением действует иначе. На участке возрастания отклонения регулируемого параметра от заданного действие регулятора форсируется, так как в начале переходного процесса отклонение и производная имеют одинаковые знаки, а производная имеет наибольшее значение, когда Ax близко к нулю. Благодаря этому наибольшее отклонение параметра в начале переходного процесса уменьшится, на- прішер точка А займет положение Ai. На участке AB, в связи с уменьшением отклонения регулируемого параметра, производная меняет знак. Поэтому регулятор подает воздействие, равное не сумме, а разности сигналов по отклонению и производной, т. е. меньшее. Если регулятор без предварения получил команду переключения на действие в противоположном направлении вблизи точки В, то регулятор с предварением получает такую команду раньше, например вблизи точки Е, когда сигналы по отклонению и производной равны. Переключение регулятора на действие в противоположном направлении до прекращения отклонения параметра предотвращает это отклонение в отрицательную сторону. Переходный процесс может стать апериодическим, как показано пунктиром на рис. 11,а .
Корректирующие устройства, применяемые для дополнительного воздействия регулятора на объект, пропорционального производной от регулируемого параметра, могут быть различны. Разными способами может быть также осуществлено их включение в схему.
На рис. 11,в приведена элементная схема системы автоматического регулирования с воздействием по производной. Здесь корректирующее устройство представляет собой дифференцирующий элемент, включенный последовательно в основную цепь воздействия звеньев системы. На входэтого звена подается отклонение регулируемого параметра, а на выходе получается величина, равная сумме двух слагаемых, из которых первое пропорционально отклонению регулируемого параметра, а второе - производной от этого отклонении. Выходные параметры преобразующего, исполнительного и регулирующего элементов обозначены функциями цуг от времени і.
На рис. 11,г дана принципиальная схема автоматического регулирования скорости вращения вала электрического двигателя постоянного тока, соответствующая элементной схеме на рис. 11,в. Дифференцирующий элемент (показан пунктиром) представляет собой контур сопротивлений RiR2 и емкости С, собранный таким образом, что 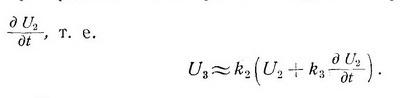
, т. е.
В схеме измерительном элементом является тахогенератор, его напряжение пропорционально числу оборотов п электродвигателя Д. Это напряжение сравнивается с заданным напряжением на потенциометре задатчика.
Выходное напряжение U3 дифференцирующегоконтура подается на усилитель 1, аусиленное напряжение приложено к обмотке возбуждения электромагнитного усилителя ЭМУ, используемого в качестве регулирующего элемента системы.
Система работает следующим образом. При увеличении нагрузки 2 электродвигателя Д скорость вращения п его вала уменьшается. В связи с этим уменьшается величина вырабатываемого тахогенератором напряжения и, следовательно, увеличивается напряжение рассогласования системы. В результате последнего обстоятельства увеличивается напряжение на обмотках возбуждения ЭМУ, что приводит к возрастанию силы тока /, протекающего через якорь двигателя Д.
Увеличение силы тока двигателя обеспечивает увеличение вращающего момента Л1вп - кі, что приводит к возрастанию скорости вращения вала двигателя.
Так как величина производной будет наибольшей в самом начале переходного процесса (когда близко к 0), регулятор начнет действовать раньше, чем наступит необходимое рассогласование регулируемого параметра. Действие регулятора в начале переходного процесса будет форсированным, так как отклонение параметра и производная имеют одинаковые знаки.
В середине переходного процесса, когда отклонение параметра достигает наибольшего значения, производная превращается в нуль, поэтому она способствует уменьшению перерегулирования параметра.
В конце переходного процесса производная вновь приобретает наибольшее значение, однако с противоположным знаком. Это способствует уменьшению длительности переходного процесса, который может стать апериодическим.
Автоматические регуляторы непрямого действия, предназначенные для регулирования какого-либо параметра по заранее заданной программе, вместо ручной настройки оборудуются программными задающими устройствами (рис. 12).
В случае применения электрических чувствительных элементов и усилительно-преобразующего устройства в качестве программного может быть использован часовой механизм 1, приводящий во вращательное движение профилированный кулачок 2, воздействующий на движок потенциометра 3 эталонного напряжения (рис. 12,6). Форма профилированного кулачка соответствует программе регулирования.
Регулирование с изменением значения регулируемой величины по заранее заданному закону называется программным регулированием.
При программном регулировании автоматический регулятор «стремится» ликвидировать рассогласование между напряжением Ui на выходе чувствительного элемента и переменным напряжением UQ задающего устройства. «Отрабатывая» задаваемое на входе переменное напряжение U0, система осуществляет соответственное изменение регулируемой величины (например, температуры Ѳ) на выходе.
Автоматические регуляторы непрямого действия можно выполнять универсальными, пригодными для регулирования разных параметров процессов. Например, к измерительной системе таких регуляторов может быть присоединен любой воспринимающий (первичный) элемент, вводящий необходимое воздействие и интенсивность. К выходу исполнительного органа регулятора могут быть присоединены разные регулирующие органы в соответствии с. видом и интенсивностью выходного воздействия .
отрывки из книги Автоматизация технологических процессов в деревообработке, Н. В. МАКОВСКИЙ (внимание! возможны ошибки распознавания)
От: LidiaZaiceva
Подобно системам автоматического регулирования в целом, автоматические регуляторы могут классифицироваться по различным признакам.
В зависимости от характера регулируемой величины различают регуляторы давления, скорости вращения, напряжения, температуры и т. д.
В зависимости от используемого принципа регулирования все регуляторы делятся на регуляторы, работающие по отклонению (ошибке), регуляторы, работающие по возмущению, и комбинированные регуляторы (см. § 1.5 и 1.6).
Взяв за основу классификации наличие дополнительных источников энергии, можно выделить регуляторы прямого и непрямого действия (см. § 1.7). При этом в зависимости от рода используемой энергии различают электрические, гидравлические, пневматические, электромеханические, электропневматические, электрогидравлические и другие регуляторы.
К достоинствам электрических регуляторов относятся компактность, малый вес и габариты, возможность применения в схемах регуляторов стандартных электро- и радиоэлементов, широкие возможности по усилению и преобразованию сигналов, возможность управления на больших расстояниях при помощи передачи сигналов по проводным и радиотехническим линиям связи. Основным недостатком электрических регуляторов является громоздкость и сложность исполнительных элементов электрического типа в тех случаях, когда требуется получение большого крутящего момента при малых скоростях вращения и высоком быстродействии. Для монтажа, наладки и обслуживания электрических и особенно электронных регуляторов требуется персонал довольно высокой квалификации. Стоимость электрических регуляторов, как правило, выше стоимости пневматических и гидравлических регуляторов аналогичного типа, особенно при исполнении регулирующей аппаратуры во взрывопожаробезопасном варианте.
Важнейшим достоинством гидравлических регуляторов является высокая надежность работы и хорошие динамические свойства гидравлических исполнительных двигателей, развивающих значительные усилия и моменты при высоком быстродействии. В случае применения в качестве рабочей жидкости минеральных масел недостатком гидравлических систем является пожароопасность, а в случае использования воды - возможность быстрого износа элементов аппаратуры от коррозии.
Достоинством пневматических регуляторов по сравнению с гидравлическими является взрывопожаробезопасность, а также отсутствие сливных трубопроводов, упрощающее систему. К их недостаткам следует отнести сжимаемость воздуха, вносящую дополнительные погрешности в работу системы регулирования.
Из сказанного ясно, что нельзя отдать общего предпочтения тому или иному виду вспомогательной энергии - каждый из них может быть плох или хорош в тех или иных конкретных условиях. Электрические, гидравлические и пневматические регуляторы в технике автоматизации существуют и развиваются параллельно. Наибольшей гибкостью обладают системы смешанного типа, в которых обычно измерительная часть выполняется электрической, а исполнительный элемент выбирается гидравлического или пневматического типа. Примером может служить электрогидравлическая следящая система, показанная на рис. 1.32.
В зависимости от наличия дополнительных обратных связей различают регуляторы без местных обратных связей (см. рис. 1.9, а; 1.10, а; 1.12) и с дополнительными обратными связями (см. рис. 1.22 и 1.23).
В зависимости от числа регулируемых величин все регуляторы могут быть подразделены на одномерные и многомерные (см. § 1.11).
Приняв за основу классификации характер модуляции, используемой при передаче сигналов от одного элемента регулятора к другому, из всего многообразия современных регуляторов можно выделить непрерывные, релейные, импульсные и цифровые регуляторы (см. § 1.12).
Как видно, автоматические регуляторы классифицируются по тем же основным направлениям, что и системы автоматического регулирования в целом.
С позиций теории автоматического управления наибольшую пользу приносит классификация регуляторов в зависимости от реализуемого в них закона регулирования. Рассмотрим этот вопрос подробнее применительно к одномерным регуляторам непрерывного действия, работающим по отклонению. В § 1.6 показано, что к основным задачам таких регуляторов относится определение ошибки (1.2) и формирование регулирующего воздействия обеспечивающего выполнение равенства (1.3) с определенной степенью точности (см. рис. 1.7). В связи с этим одной из основных характеристик регуляторов, работающих по отклонению, естественно считать уравнение, связывающее регулирующее воздействие с ошибкой х. В большинстве реальных регуляторов связь величин достаточно сложна и описывается дифференциальным уравнением высокого порядка (как правило, нелинейным). Для целей сравнительного анализа и классификации обычно уравнения регуляторов упрощают, пренебрегая инерционностью элементов, образующих автоматический регулятор.
Законом регулирования называется зависимость между входной и выходной величинами регулятора, составленная без учета инерционности его элементов. Этот термин применяется не только к системам регулирования, но и к следящим системам, системам ориентации, системам управления и т. д. В последних случаях закон регулирования называется законом управления.
В простейших случаях регулирующее воздействие зависит только от ошибки х:
Если функция (1.32) является линейной, то
![]()
где постоянная величина; - коэффициент пропорциональности.
Обозначив получим, что
Закон регулирования, характеризуемый уравнением (1.33), называется пропорциональным законом регулирования. Регуляторы, в которых используется такой закон регулирования, называются пропорциональными регуляторами, или П-регуляторами. Примерами систем, в которых используется пропорциональный закон регулирования, могут служить системы, изображенные на рис. 1.8, а; 1.9, а; 1.10, а; 1.13 и 1.22.
Основным достоинством П-регуляторов является их чрезвычайная простота. Промежуточные элементы таких регуляторов (см. рис. 1.7, а) не содержат корректирующих устройств и выполняют только функции усиления сигнала ошибки по мощности и преобразования физической природы этого сигнала. К сожалению, точность регулирования, обеспечиваемая П-регуляторами, сравнительно невысока, особенно для объектов, обладающих плохими динамическими свойствами. Во многих случаях применение пропорционального закона регулирования приводит к возникновению статической ошибки (см. § 1.9).
Уравнение (1.32) характеризует лишь один из возможных подходов к построению автоматических регуляторов. Второй подход заключается в том, что в зависимость от сигнала ошибки ставится не величина регулирующего воздействия, а скорость его изменения
Если зависимость (1.34) является линейной, то
Закон регулирования (1.36) называется интегральным законом регулирования, а соответствующий регулятор - интегральным регулятором, или И-регулятором. Практически зависимость (1.36) реализуется при помощи введения в состав регулятора устройств, осуществляющих интегрирование входного сигнала. Во многих случаях такими устройствами являются исполнительные двигатели автоматических систем (см. рис. 1.12).
Интегральные регуляторы применяются в целях увеличения точности работы САР в установившихся режимах (см. § 1.9). Однако
поведение систем регулирования с И-регуляторами в неустановившихся режимах, как правило, оказывается неудовлетворительным и, во всяком случае, худшим, чем в системах, использующих пропорциональный закон регулирования. Причины этого выявляются при сопоставлении соотношений (1.33) и (1.36). В рамках принятой идеализации (при пренебрежении инерционностью элементов регулятора) в П-регуляторе с уравнением (1.33) регулирующее воздействие мгновенно изменяется при изменении ошибки х. Это означает, что при появлении ошибки П-регулятор тотчас принимает меры для ее ликвидации. Иная картина имеет место в И-регуляторе. Например, при из уравнения (1.36) следует, что
Это значит, что пройдет определенный промежуток времени, прежде чем регулирующий орган отклонится на величину, достаточную для ликвидации появившейся ошибки. Такое «отставание» процесса изменения регулирующего воздействия от процесса изменения ошибки х может привести (и в реальных системах часто приводит) к возникновению слабо затухающих или даже расходящихся колебаний регулируемой величины относительно ее требуемого значения.
Отмеченный недостаток И-регуляторов легко устранить объединив уравнения (1.33) и (1.36), т. е. сконструировав регулятор таким образом, чтобы
где коэффициент пропорциональности.
Закон регулирования (1.37) называется пропорционально-интегральным законом регулирования, а соответствующий регулятор - пропорционально-интегральным регулятором, или ПИ-регулятором. Благодаря наличию интегральной составляющей в правой части уравнения (1.37) ПИ-регуляторы не имеют статической ошибки. Хорошее поведение САР с ПИ-регуляторами в неустановившихся режимах (в динамике) обеспечивается (при правильном расчете регулятора) за счет пропорциональной составляющей закона регулирования. Отмеченные особенности позволили широко использовать ПИ-регуляторы в системах регулирования общепромышленного назначения.
Продифференцировав уравнение (1.37) по времени, получим, что
![]()
Из сопоставления (1.38) с (1.35) видно, что улучшение динамических свойств САР с ПИ-регуляторами (по сравнению с системами, использующими интегральный закон регулирования) достигается при помощи введения в закон регулирования составляющей, пропорциональной производной от сигнала ошибки по времени, или (короче говоря) при помощи введения производной в закон
регулирования. Этот вывод оказывается справедливым не только для И-регуляторов, но и для регуляторов других типов.
Введение производной в закон регулирования является мощным средством улучшения поведения САР в неустановившихся режимах. В частности, с целью улучшения динамики САР производная от ошибки часто вводится в пропорциональный закон регулирования. В результате получается пропорционально-дифференциальный закон регулирования
![]()
Регуляторы с законом регулирования (1.39) сокращенно называются ПД-регуляторами. Они реагируют не только на саму ошибку но и на тенденцию ее изменения. Например, в том случае, когда ошибка х возрастает, и регулирующее воздействие в ПД-регуляторе оказывается больше, чем в П-регуляторе (коэффициенты считаем положительными). Наоборот, при уменьшении ошибки и величина в ПД-регуляторе будет меньше, чем в П-регуляторе. Такой характер работы ПД-регулятора способствует демпфированию (гашению) колебаний, возникающих в САР вследствие инерционности отдельных элементов системы. Более того, ПД-регулятор вступает в действие уже тогда, когда но имеется возникшая вследствие тех или иных возмущений скорость изменения ошибки ).
На практике производная вводится в закон регулирования при помощи специальных дифференцирующих устройств, выходная величина которых пропорциональна производной от входной величины. Примерами таких устройств могут служить пассивные дифференцирующие электрические цепи, тахогенераторы, операционные усилители и др. (см. § 2.9).
Регулирование только по производной от сигнала ошибки, т. е. использование закона регулирования является нецелесообразным хотя бы потому, что регулятор с таким законом регулирования совершенно не реагирует на постоянные ошибки сколь угодно большой величины (при значение
Кроме ПИ- и ПД-регуляторов, в практике регулирования часто применяются ПИД-регуляторы с пропорционально-интегрально-диф-ференциальным законом регулирования
в котором член, пропорциональный интегралу от ошибки, обеспечивает требуемую точность работы САР в установившихся режимах, а член, пропорциональный скорости изменения ошибки, предназначен для улучшения динамических свойств САР.
Рассмотренные выше законы регулирования (1.33), (1.36), и (1.40) относятся к числу простейших. В более сложных
случаях в закон регулирования может быть введено несколько интегралов от сигнала ошибки. Производные могут вводиться не только первого, но также второго и более высоких порядков, и не только от сигнала ошибки, но и от регулируемой величины или каких-либо промежуточных координат системы. В регуляторах, реализующих комбинированный принцип регулирования, закон регулирования содержит члены, зависящие от измеряемого возмущения его производных и интегралов и т. д.
Устройства, служащие для введения производных и интегралов в закон регулирования, представляют собой частный случай корректирующих устройств САР. Теория этих устройств и вопросы их расчета подробно рассматриваются в гл. 6.
Уравнения (1.33), (1.36), (1.37), (1.39) и (1.40) являются линейными относительно входящих в них переменных . В связи с этим соответствующие законы регулирования называются также линейными.
В технике регулирования, наряду с линейными, применяются и нелинейные законы регулирования. Простейшими примерами таких законов могут служить соотношения (1.32) и (1.34), если фигурирующие в них функции отличны от линейных.
Среди нелинейных законов регулирования наиболее распространены релейные законы. Например, приняв в уравнении (1.32)
где - максимальное значение регулирующего воздействия, получим так называемый двухпозиционный релейный закон регулирования. При
где - величина, характеризующая зону нечувствительности регулятора, соотношение (1.32) определяет трехпозиционный релейный закон регулирования и т. д.
Применение релейных законов регулирования во многих случаях дает возможность решать задачу автоматического регулирования той или иной физической величины весьма простыми техническими средствами, при малом весе и габаритах регулирующей аппаратуры и высоком ее быстродействии. Во многих случаях использование нелинейных законов регулирования и управления позволяет добиться таких результатов, которые принципиально не могут быть достигнуты при помощи линейных регуляторов (см. гл. 8). Поэтому направление, связанное с разработкой и применением нелинейных законов управления, в настоящее время интенсивно развивается.


















")





