Регулируют изменением: частоты тока питающей сети; числа пар полюсов обмотки статора; параметров цепи статора или ротора. Для асинхронных электродвигателей применяются все три способа регулирования, для синхронных — только первый.
У коллекторных электродвигателей переменного тока частоту вращения регулируют способом, указанным для электродвигателя постоянного тока с последовательным возбуждением.
Прямая интеграция или адаптация к вашим потребностям
Тема: Типы синхронных машин. Что такое синхронная машина? Синхронная машина называется чередующейся машиной, ротор которой в стационарном состоянии вращается с той же скоростью. Адаптивные решения обратной связи для линейных и поворотных приводов. В вашем распоряжении широкий выбор различных линейки и измерительных дисков, которые вы можете гибко адаптировать к вашим потребностям. Мы разработаем электронику для анализа вашего приложения или разработки подходящего макета для вашего существующего решения.
Регулирование частоты вращения изменением частоты тока является наиболее экономичным, но для питания электродвигателя требуется отдельный генератор или преобразователь с регулируемыми частотой и напряжением. При этом способе необходимо стремиться, чтобы характеристики асинхронного электродвигателя обладали достаточной жесткостью, которую обеспечивают совместным регулированием частоты тока и напряжения.
Суперточное позиционирование двигателей и приводов
- Широкое разнообразие стандартных версий.
- Хорошо согласованные решения.
При пропорциональном понижении частоты тока и напряжения жесткость механической характеристики 1 (рис. 1) и максимальный момент Мmах уменьшаются незначительно по сравнению с естественной характеристикой 0. К преимуществам частотного регулирования следует отнести широкий диапазон (до 12:1) и плавность.
Регулирование частоты вращения изменением числа пар полюсов применяют только для асинхронных электродвигателей с короткозамкнутым ротором, так как у двигателей с фазным ротором потребовалось бы одновременное переключение обмотки ротора, усложняющее его схему и конструкцию.
Число пар полюсов можно изменить переключением числа секций одной обмотки или переключением двух независимых обмоток. В первом случае обмотка статора состоит из двух равных частей, включаемых последовательно или параллельно. Такое переключение позволяет изменить число пар полюсов в 2 раза и, следовательно, менять частоту вращения электродвигателя в отношении 2:1. Применение двух обмоток с различным числом пар полюсов позволяет менять частоту вращения в различных соотношениях, например, 1:3; 2:3 и т.д.
Безопасная работа при высокой доступности
Два датчика достаточно для определения скорости и направления вращения и эффективной защиты устройства от чрезмерной скорости. Никаких дополнительных защитных мер не требуется, так как система нечувствительна к загрязнению.
- Простота установки благодаря большому расстоянию переключения.
- Работа расширена с расширенным температурным диапазоном.
- Высокая доступность благодаря бесконтактному принципу.
Точный, надежный и компактный
Благодаря узкой форме конструкции они не вызывают оптического увеличения в двигателе. Измерение низких и высоких скоростей вращения.
Сверхточное измерение благодаря неподдерживаемым измерительным системам
Они чрезвычайно точны с каждой скоростью.- Они не подвержены износу из-за бесконтактного принципа работы.
- Высокая безопасность оборудования благодаря широкому диапазону скоростей.
- Быстрый ввод в эксплуатацию со ориентирами.
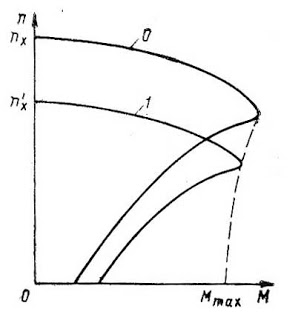
Рис. 1. Механические характеристики асинхронного электродвигателя при различной частоте тока
Двигатели, способные работать при двух различных числах пар полюсов, называют двухскоростными. Их конструируют для работы с постоянным моментом или постоянной мощностью.
Кроме двухскоростных двигателей, применяют трех- и четырехскоростные. Промышленность выпускает двухскоростные двигатели с одной обмоткой в статоре, трех- и четырехскоростные — с двумя обмотками, которые в свою очередь могут переключаться в отношении 2:1. Этот способ регулирования экономичен (двигатели имеют достаточно жесткие характеристики), но требует сложного переключающего устройства; кроме того, у двигателей с двумя обмотками резко снижается использование активной меди, так как при работе одной из обмоток вторая выключена. Однако благодаря своим преимуществам двигатели с переключением числа пар полюсов широко применяются в судовых электроприводах, не требующих плавного регулирования частоты вращения (шпилей, брашпилей и др.).
Мы эффективно защищаем ваши ветровые турбины от чрезмерной скорости
Уже два индуктивных датчика, обращенных к запирающему диску, достаточны для определения направления вращения и скорости вращения ротора.
- Высокое расстояние переключения.
- Расширенный температурный диапазон.
- Бесконтактный принцип действия.
- Устойчивость к загрязнению.
Точная настройка скорости, направления вращения и положения блокировки
Измерительная система состоит из магнитной ленты, установленной на главном валу, и головки датчика, расположенной над ней. Система распознает не только направление вращения, но также использует опорные точки для определения правильного положения блока ротора. Все бесконтактно, поэтому оно не изнашивается.
Регулирование изменением параметров цепей электродвигателя распространено у двигателей с фазным ротором. При введении в цепь ротора активного сопротивления частота вращения двигателя уменьшается при том же значении вращающего момента (). Этот способ неэкономичен, требует дорогого и громоздкого реостата, причем уменьшение частоты вращения составляет 10—20 %, поэтому в судовых условиях он применяется сравнительно редко и в основном на короткие промежутки времени.
Обеспечение оптимального контроля качества при подаче питания в вашу сеть
- Супер-точная даже при очень низких скоростях.
- Без износа и без обслуживания благодаря бесконтактному принципу работы.
- Возможность управления положением.
Пуск синхронных двигателей. Различают прямой пуск и пуск с ограничением пускового тока.
Прямой пуск прост, но при включении возникают большие пусковые токи, достигающие значений I п = (4-7) I ном.
При питании электродвигателя от электростанции ограниченной мощности пусковые токи могут вызвать недопустимые кратковременные снижения напряжения, нарушающие работу включенных приемников электрической энергии. Поэтому прямой пуск применяется в том случае, если мощность электродвигателя во много раз меньше мощности электростанции, от которой он питается.
- Легкая установка, не занимающая слишком много места.
- Максимальный срок службы благодаря бесконтактному принципу работы.
- Точность благодаря высокому разрешению.
При мощности электродвигателя соизмеримой с мощностью электростанции применяют различные способы пуска с ограничением пускового тока: переключением обмотки статора двигателя со ; при помощи ; включением резисторов в цепь статора; включением реакторов в цепь статора; включением резисторов в цепь ротора (для двигателей с фазным ротором).
Экономия энергии При работе электропривода, в зависимости от характеристик крутящего момента нагрузки, мы имеем разные уровни экономии. Для энергосберегающих применений экономия энергии прямо пропорциональна крутящему моменту и уменьшению скорости вала, тогда как в приложениях с переменным крутящим моментом эти сбережения увеличивают третью мощность до уменьшенного диапазона скорости.
В результате потери в силовых кабелях снижаются. Оптимизированная работа частичной нагрузки. Коэффициенты эффективности для трехфазных асинхронных двигателей обычно даются только для номинальной точки. Если двигатель работает непосредственно от сети с номинальной нагрузкой, ее производительность значительно снижается из-за постоянных механических и электромагнитных потерь. Преобразователи частоты обеспечивают оптимальную намагниченность двигателя в зависимости от качества управления. Поэтому при использовании инвертора коэффициент полезного действия всей силовой установки не падает настолько сильно при работе с маломощным двигателем.
При пуске переключением обмоток статора со «звезды» на «треугольник» сначала замыкается выключатель Q1, при этом обмотки статора двигателя оказываются включенными «звездой» (рис. 2, а). После разгона двигателя выключатель Q1 размыкается, а выключатель Q2 замыкается, и обмотки включаются на «треугольник». При этом способе пусковой ток уменьшается в 3 раза.
Заметное улучшение обычно наблюдается с моторами мощностью до 11 кВт. Автоматическая оптимизация потребления энергии. Скорректированные стратегии управления позволяют оптимизировать энергопотребление. В приложениях, где нет быстрых изменений нагрузки, пользователь может применить автоматическую оптимизацию потребления энергии. Инвертор уменьшает намагниченность двигателя до оптимального минимума. В результате есть дополнительная экономия потребления энергии по сравнению с сокращением оборота. Эта функция работает хорошо для всех медленных регулировок, которые обычно встречаются в автоматике насоса и вентилятора.
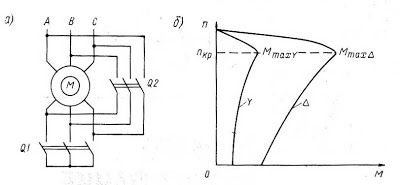
Рис. 2. Пуск двигателя переключением со «звезды» на «треугольник»
Преимуществом способа является его простота, недостатком — уменьшение пускового момента также в 3 раза (рис. 2, б). Уменьшение момента объясняется тем, что при соединении обмоток «звездой» напряжение на них в √3 раза меньше, чем при соединении «треугольником», а как видно из формулы (), момент зависит от напряжения во, второй степени. В некоторых случаях пусковой момент при соединении обмоток «звездой» оказывается недостаточным, тогда применение способа становится невозможным.
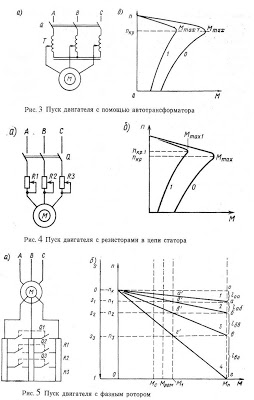
Преимуществом пуска двигателя с помощью автотрансформатора по сравнению с предыдущим способом является возможность установить любое первоначальное напряжение (рис. 3, а) и затем плавно увеличивать его. Недостатком этого способа являются высокая стоимость, большие масса и габаритные размеры пускового автотрансформатора. Характеристики приведены на рис. 3, б.
Сокращение циклов запуска Управление скоростью может уменьшить количество запусков во многих приложениях. Любой нерегулируемый запуск электродвигателя требует дополнительной энергии. В случае насосов потребление энергии для запуска обычно составляет 5-10% от общего потребления энергии, но есть примеры того, что для запуска требуется до 40% энергии. Кроме того, уменьшаются пиковые токи и механическая ударная нагрузка при пуске. Другими преимуществами управления скоростью являются более длительный срок службы устройства из-за уменьшения механической нагрузки на его компоненты.
Включение на время пуска в цепь статора резисторов (рис. 4,а) или реакторов приводит к большим активным потерям в случае резисторов и уменьшению коэффициента мощности в случае реакторов, однако вследствие простоты этих способов они находят достаточно широкое применение. Как видно из формул () и (), включение элементов в цепь статора увеличивает критическую частоту вращения М mах1 и уменьшает момент M mах (характеристика 1, рис. 4, б).
Все эти возможности доступны через интегрированные программные функции современных частотных преобразователей. Пример из практики: с внедрением в этом квартале привода контроля скорости произошло значительное сокращение пусков и такая же механическая нагрузка на систему.
Применение приводных систем с постоянными характеристиками нагрузки Для приложений с фиксированными характеристиками крутящего момента нагрузки, например, при незначительном изменении нагрузки с изменением скорости вращения в более широком диапазоне. Среди них конвейеры производственных линий, конвейеры, лифты, мешалки, мельницы. Учитывая пример применения фидера, в котором корпус автомобильного двигателя установлен на производственной линии, очевидно, что вес тела всегда один и тот же, независимо от того, движется ли лента быстро или медленно.
Пуск двигателей с фазным ротором осуществляется с помощью пусковых реостатов, включенных в цепь ротора (рис. 5, а).
Пусковой реостат состоит из трех-четырех секций резисторов на каждую фазу. По мере разгона двигателя секции реостата поочередно закорачивают. Сопротивления пускового реостата рассчитывают графоаналитическим методом с использованием пусковой диаграммы. В начале пуска в цепь ротора включают реостат с полным сопротивлением, при котором пусковой момент должен быть М п = (0,7 - 0,8)Мmах.
Таким образом, время, необходимое для перемещения этого блока, всегда одно и то же. Конечно, времена трения и ускорения меняются в зависимости от рабочего состояния, но спрос на момент нагрузки постоянный. Мощность, требуемая этой системой, пропорциональна требуемому крутящему моменту и частоте вращения двигателя. Если можно уменьшить скорость вращения при постоянной нагрузке, экономия энергии также будет очевидна.
Оптимизируя крутящий момент и скорость вращения, вы можете повысить энергоэффективность в нескольких приложениях с постоянным крутящим моментом. Часто количество товаров, перевозимых на ленте, не является постоянным. Если скорость ленты регулируется до количества транспортируемого материала, это будет не только обеспечивать поток и непрерывность транспортировки, но также и необходимую энергию. Однако, если регулировка скорости невозможна или нежелательна, то для большинства частотных преобразователей можно экономить энергию.
Механические характеристики асинхронного двигателя на рабочем участке от М = 0 до М = 0,8 М mах можно приближенно считать прямолинейными, тогда на пусковой диаграмме (рис. 5, б) искусственная характеристика, соответствующая началу пуска, будет иметь вид прямой 4, проходящей через точки n х и г.
Они регулируют выходное напряжение двигателя в зависимости от нагрузки. При увеличении нагрузки он увеличивает напряжение. Качество этого контроля определяется качеством инвертора. Однако экономии энергии, которую вы можете получить с помощью этой функции, недостаточно для обоснования инвестиций в преобразователь частоты. Применение приводных систем с переменным рабочим объемом. Системы контроля скорости насосов и вентиляторов являются наиболее распространенными приложениями приводов с переменной крутящей нагрузкой с квадратной характеристикой.
Рис. 3-5. Пуск двигателя с помощью автотрансформатора (3). Пуск двигателя с резисторами в цепи статора (4). Пуск двигателя с фазным ротором (5)
Под действием вращающего момента двигатель начнет вращаться с увеличивающейся частотой вращения, а вращающий момент, как видно из характеристики, будет уменьшаться. Этот процесс будет продолжаться до тех пор, пока вращающий момент не станет равным моменту сопротивления М с, причем частота вращения будет меньше номинальной, соответствующей естественной характеристике.
Для увеличения частоты вращения необходимо выключить секцию пускового реостата R3 (см. рис. 5), замкнув выключатель Q3. Обычно это делают в точке г" (см. рис. 5, б) при вращающем моменте двигателя M 1 = (1,1-1,2) M ном. Оставшееся сопротивление пускового реостата должно быть таким, чтобы момент двигателя на искусственной характеристике 3 не превышал значения пускового момента M п, т.е. характеристика 3 должна пройти через точку "в" (считается, что за время замыкания выключателя Q3 частота вращения двигателя n 3 не изменяется). Аналогично замыкают выключатели Q2 и Q1, двигатель переходит на работу в соответствии с характеристиками 2 и 1, пока не будет полностью шунтирован реостат.
Однако в случае насосов различают широко распространенные вихревые насосы с переменными характеристиками крутящего момента от эксцентриковых, вакуумных или объемных насосов, которые имеют постоянную нагрузку на крутящий момент. Использование насосов и вентиляторов огромно. В этом задействованы насосы и вентиляторы. Простой, но очень эффективный метод энергосбережения в машинах с переменной нагрузкой - это контроль скорости. Уменьшая скорость вращения, спрос на энергию уменьшается до третьей мощности.
Этот потенциал с высокой экономичностью делает все приложения квадратными метрами идеальными для запуска анализа энергоэффективности. Чтобы избежать неожиданностей при настройке скорости насосов и вентиляторов, пользователь должен на этапе проектирования помнить, что с изменением скорости вращения рабочая точка и, следовательно, коэффициент эффективности машины потока также изменяются.
Если для естественной характеристики 1

Т. е. отношение критических скольжений для искусственной характеристики 2 и естественной характеристики 1 равно отношению приведенного активного сопротивления фазы ротора, включая сопротивление секции пускового реостата, к приведенному активному сопротивлению ротора.
Узел, состоящий из проточной машины и преобразователя с переменной скоростью вращения, представляет собой систему, которая экономит энергию. Если разница между максимальной потребляемой мощностью и средней рабочей нагрузкой с недогруженным двигателем слишком велика, хорошим решением является использование каскадной системы. Кроме того, при восстановлении существующих систем такие инвестиции возвращаются через короткое время. В каскадной системе насос с переменной скоростью контролирует основные потребности.
Как только увеличивается спрос, преобразователь частоты снова включается. Таким образом, насосы работают с оптимальной эффективностью. Насос всегда обеспечивает наилучшее использование системы. Та же система может использоваться аналогично системе вентилятора. В зависимости от производителя и версии, каскадные элементы управления уже встроены в инвертор или доступны в качестве внешних модулей.
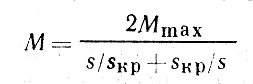
Видно, что при любых одинаковых моментах для естественной и искусственной характеристик имеет место условие s/s кp = const, следовательно, для характеристик 1 и 2 при моменте М = М п справедливо равенство

На пусковой диаграмме (см. рис. 5) скольжению s 1 соответствует отрезок "оа", а скольжению s 2 — отрезок "об". Обозначим длину первого отрезка l оа, второго l оа + l об, тогда:
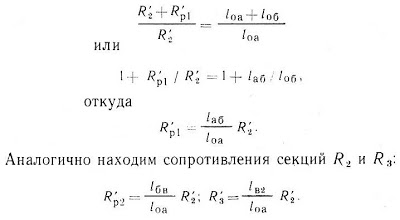
Активное сопротивление обмотки ротора двигателя определяется по каталогу. Если в каталоге данные о сопротивлении отсутствуют, его можно вычислить по формуле:

Электрическое торможение. Способы электрического торможения двигателей переменного тока аналогичны .
Режим торможения с отдачей энергии в сеть наступает при частоте вращения ротора, превышающей частоту вращения магнитного поля. Такой режим возможен при разгоне двигателя под действием падающего груза или при переключении много-скоростного электродвигателя на меньшую скорость.
При разгоне двигателя под действием падающего груза по естественной характеристике 0 (рис. 6) частота вращения увеличивается и при М = 0 достигает частоты вращения магнитного поля n х. При дальнейшем разгоне двигателя частота вращения становится больше n х, больше напряжения сети и машина работает в режиме генератора, отдавая в сеть активную энергию. Этому режиму соответствует участок характеристики в квадранте II.
Динамическое торможение асинхронного двигателя производится отключением обмотки статора от трехфазной питающей сети и включением ее на питание от источника постоянного тока (рис. 7), при этом в двигателе вместо вращающегося магнитного поля возникает неподвижное (n х = 0). В результате взаимодействия вращающегося ротора с неподвижным магнитным полем возникает тормозной момент (см. рис. 6, характеристика 1). Тормозной момент можно регулировать изменением напряжения постоянного тока или изменением сопротивления резистора R (см. рис. 7).

Рис. 6-7. Механические характеристики асинхронной машины при различных режимах работы (6). Схема динамического торможения асинхронного электродвигателя (7)
Для двигателей с фазным ротором, кроме того, регулирование тормозного момента возможно изменением сопротивления резисторов, включенных в цепь ротора.
Торможение противовключением может быть получено при реверсировании двигателя на ходу путем переключения двух фаз обмотки статора, при этом магнитное поле начинает вращаться в обратную сторону и тормозит двигатель. На рис. 6 этому режиму соответствует участок характеристики 2, находящийся в квадранте II. Когда частота вращения двигателя уменьшится до нуля, его необходимо отключить, в противном случае он начнет вращаться в обратную сторону (участок характеристики 2 в квадранте III).
Сравнение способов торможения
Сравнивая различные способы торможения двигателей переменного тока, можно сделать вывод, что наиболее экономичным является торможение с отдачей энергии в сеть , но при нем нельзя затормозить двигатель до частоты вращения меньшей, чем частота вращения магнитного поля.
Динамическое торможение позволяет тормозить электродвигатель до частоты вращения, близкой к нулю, но требует дополнительного источника постоянного тока.
Торможение противовключением наименее эффективно , так как при больших тормозных токах тормозной момент на валу двигателя с короткозамкнутым ротором незначителен.
Поэтому данный способ торможения применяется только для двигателей с фазным ротором, у которых за счет введения в цепь ротора резисторов с большим сопротивлением можно увеличить тормозной момент при одновременном уменьшении тока (см. рис. 6, характеристика 3).
контакты и мы моментально примем все действия для удаления Вашего материала.
⇓ОБСУДИТЬ СТАТЬЮ⇓
В последние 10-25 лет установилась четкая тенденция на переход от привода постоянного тока к приводу переменного тока благодаря совершенствованию законов управления двигателями переменного тока и развитию силовой электроники.
Применение двигателей переменного тока обусловлено их простотой, дешевизной, повышенной надежностью, существенно меньшими габаритами и массой по сравнению с двигателями постоянного тока. К недостаткам регулирования скорости можно отнести высокую сложность теории машин переменного тока и алгоритмов управления, закладываемых в преобразовательные устройства.
Наибольшее распространение получили следующие способы регулирования угловой скорости асинхронного двигателя: 1) реостатное; 2) изменением напряжения на статоре; 3) переключением числа пар полюсов; 4) изменением частоты питающего напряжения и др.
Реостатное регулирование
Схема включения АД при этом способе регулирования представлена ниже. Реостатные характеристики получаются путем введения в цепь ротора добавочного сопротивления. При этом с ростом сопротивления падает жесткость МХ.
Допустимый диапазон регулирования скорости при данном способе
Так как , то приближенно
![]() ,
,
где – относительная величина изменения скорости; – относительная величина изменения момента.
Из полученной формулы видно, что при равных относительных отклонениях угловой скорости и момента нагрузки диапазон регулирования . При более низком допустимом отклонении угловой скорости диапазон оказывается ещё меньше.
Потери мощности при реостатном регулировании складываются из переменных потерь, включающих потери в меди статора и ротора и во внешних резисторах роторной цепи, и постоянных – не зависящих от нагрузки. Суммарные постоянные потери в двигателе остаются примерно одинаковыми независимо от нагрузки и скорости двигателя.
Электромагнитная и механическая мощности для АД
![]() ; ,
; ,
отсюда можно определить потери в роторе
Видно, что потери пропорциональны величине скольжения и распределяются пропорционально отношению сопротивлений ротора двигателя и добавочного сопротивления в цепи ротора, поэтому двигатель при реостатном регулировании может развивать момент, равный номинальному.
Недостатками реостатного регулирования скорости являются ступенчатое регулирование скорости и использование дополнительной аппаратуры, невысокое быстродействие и большие потери энергии при регулировании.
Регулирование угловой скорости АД изменением напряжения на статоре
При изменении величины первой гармоники изменяется величина критического момента при постоянстве критического скольжения.
Такое изменение достигается использованием тиристорного преобразователя напряжения (ТПН).
Максимальный момент при уменьшении напряжения снижается пропорционально квадрату напряжения:
 ,
,
где – критический момент при сниженном напряжении; – пониженное напряжение.
Из рис. видно, что пределы регулирования скорости весьма ограничены, даже при вентиляторной нагрузке.
Для расширения диапазона используют замкнутые по скорости САР, структурная схема которой представлена на рис. ниже. В состав такой САР сходит датчик скорости (BR) и регулятор скорости, на который поступает разность между заданным и текущим значением скоростей. На выходе регулятора скорости вырабатывается сигнал, подающийся на вход системы импульсно-фазного управления, которая вырабатывает управляющие импульсы для ТПН. Особенность такого регулирования заключается в том, что все характеристики сходятся в точке синхронной скорости , поэтому, чем меньше скорость, тем выше скольжение и больше потери в двигателе. Механические характеристики двигателя при фазовом управлении в замкнутой САР скорости представлены на рис. 5.11.
Двигатель при таком способе регулирования может работать продолжительное время при условии
Допустимый момент можно найти, приравнивая допустимые потери к номинальным
![]() .
.
Кривая допустимого момента по нагреву представлена на рис.5.11.
Данный способ регулирования нельзя применять для механизмов, работающих в продолжительном режиме работе с постоянной нагрузкой. Эффективным оказывается использование фазового регулирования для механизмов, у которых статический момент зависит от скорости двигателя , например, для приводов вентиляторов, насосов, компрессоров. Этот способ также применим, когда двигатель работает на пониженных скоростях малое время относительно всего цикла работы, например, лифты. В этом случае завышение установленной мощности двигателя невелико.
Достоинством фазового управления является более низкая стоимость преобразователя (ТПН) в сравнении с преобразователем частоты (ПЧ) равной мощности, что позволяет для указанных механизмов обеспечить приемлемое качество технологического процесса без дополнительных затрат.
5.4.3. Изменение числа пар полюсов
Из выражения для угловой скорости АД:
![]() ,
,
видно, что регулирование скорости можно осуществлять изменением числа пар полюсов p обмотки статора двигателя. Так как данная величина может быть только целым числом, регулирование скорости оказывается ступенчатым.
Для данного вида регулирования изготавливаются многоскоростные АД с КЗР. В пазах сердечника статора размещают либо две независимые обмотки, либо одну полюснопереключаемую.
Различают две основные схемы переключения. Схема «звезда/двойная звезда» (рис. 5.12, I-II) обеспечивает регулирование с постоянством момента. Такую схему целесообразно применять в электроприводе с постоянно действующим моментом нагрузки при изменении частоты вращения. Схема «звезда/звезда» (рис.5.12, I-III) также даёт двукратное изменение числа пар полюсов, однако регулирование происходит при постоянстве мощности, то есть при переключении на повышенную скорость момент уменьшается в два раза. Такие схемы разумно применять в приводах, где момент сопротивления обратно пропорционален частоте вращения. Механические характеристики АД при регулировании скорости изменением числа пар плюсов представлены на рис. ниже.
Многоскоростные АД широко применялись в электроприводах, допускающих ступенчатое регулирование частоты вращения (привода лифтов, вентиляторов, станков). Достоинством такого способа является сохранение высоких экономических показателей при переходе с одной частоты вращения на другую, так как на всех ступенях переключения обмотки статора КПД и коэффициент мощности двигателя остаются практически неизменными. К недостаткам относят большую в сравнении с обычными АД сложность, завышенные габариты, большую стоимость. Кроме того, необходимость переключения обмоток статора на разное число пар полюсов требует усложнения коммутационной аппаратуры, что так же приводит к возрастанию цены электропривода в целом. В настоящее время этот способ вытесняется частотным регулированием.
Частотное регулирование скорости асинхронного двигателя
Частотный способ регулирования скорости АД является превалирующим и основным. Чем это обуславливается? В первую очередь в настоящее время развита теория машин переменного тока, что позволило найти оптимальные с некоторых позиций законы управления АД. Развитие промышленной электроники позволило в полной мере реализовать данные законы в «железе».
Существуют системы скалярного, векторного управления и системы прямого управления моментом. Выбор способа и принципа управления определяется совокупностью статических, динамических и энергетических требований к асинхронному электроприводу.
Принцип скалярного управления частотно-регулируемого асинхронного электропривода основан на изменении частоты и текущих значений модулей переменных АД (напряжений, магнитного потока, потокосцеплений и токов цепей двигателя). Этот принцип является наиболее распространённым в связи с тем, что ему свойственна техническая простота измерения и регулирования переменных АД, а так же возможность построения разомкнутых систем управления скоростью. Основной недостаток заключается в трудности реализации желаемых законов регулирования скорости и момента АД в динамических режимах.
Принцип векторного управления связан как с изменением частоты и текущих значений переменных АД, так и с взаимной ориентацией их векторов в полярной или декартовой системе координат. Благодаря контролю положения углов переменных такой способ обеспечивает полное управление АД как в статических, так и в динамических режимах, что даёт заметное улучшение качества переходных процессов по сравнению со скалярным управлением.
Системы прямого управления моментом являются продолжением и развитием систем векторного управления. Задачей прямого управления моментом является обеспечение быстрой реакции электромагнитного момента двигателя на управляющее воздействие. В отличие от векторного управления, где изменение момента производится путем воздействия на ток статора, в системе с прямым управлением моментом управляемой величиной является потокосцепление статора.
Преобразователи частоты, предназначенные для частотно-регулируемых АД, подразделяются по типу связи с питающей сетью на непосредственные ПЧ (НПЧ) и двухзвенные ПЧ (ДПЧ) с промежуточным звеном постоянного или переменного тока.
Момент АД пропорционален магнитному потоку и активной составляющей вторичного тока :
![]() ,
,
где – конструктивная постоянная АД; – угол сдвига между ЭДС и током ротора;
 .
.
Из формулы для момента видно, что уменьшение магнитного потока, являющееся следствием увеличения частоты , приведет к возрастанию , а следовательно и потерь в роторе и одновременному уменьшению допустимого момента двигателя по условиям охлаждения двигателя. Уменьшение частоты при постоянстве амплитуды напряжения , как было показано в п. 4.3.3, также не допустимо по условиям насыщения магнитной системы машины. поэтому регулирование скорости двигателя изменением частоты питающего напряжения при условии постоянства момента двигателя приемлемо только при одновременном изменении амплитуды питающего напряжения, то есть выполнении закона , что обеспечивает практически постоянный магнитный поток в двигателе.
Для реализации указанного закона управления между сетью и двигателем включается преобразователь частоты (ПЧ), обеспечивающий одновременное изменение частоты и амплитуды напряжения на двигателе. При пониженных скоростях у самовентилируемых двигателей уменьшается отвод тепла в окружающую среду, поэтому в таких случаях необходимо снижать допустимый момент на двигателе.
При частотном регулировании по причинам, обусловленными механической прочностью подшипников и элементами ротора, поднимать частоту выше . Поэтому основной способ регулирования скорости заключается в уменьшении частоты напряжения.
Для построения примерного вида механических характеристик примем, что , тогда уравнение для критического момента можно переписать следующим образом:
 .
.
Из формулы видно, что критический момент при выполнении закона остаётся постоянным. Условие пренебрежения активного сопротивления статора корректно при высоких скоростях двигателя, когда . При низких скоростях падение напряжения на активном сопротивлении статора становится сопоставимо с величиной напряжения на зажимах статора, что приводит к падению перегрузочной способности двигателя . Для того, чтобы реализовать одинаковую перегрузочную способность при частотном регулировании в области низких частот вращения используют так называемую «IR-компенсацию », которая заключается в том, что на малых скоростях делается добавка напряжения на статоре, компенсирующая .
Диапазон регулирования скорости в разомкнутых системах составляет . В замкнутых системах диапазон может быть существенно расширен.
Основные сложности, возникающие при реализации частотного управления заключаются в следующем:
1) для получения в системах ПЧ-АД свойств аналогичных (или даже превосходящих) свойства систем ТП- ДПТ необходимо получение информации о различных параметрах АД;
2) системы являются сильно нелинейными и для получения высококачественных систем необходимо вводить звенья, компенсирующие нелинейность объекта регулирования;
3) закон не является оптимальным, и требуется корректировка закона, учитывающая на валу двигателя;
4) в АД входят параметры , величина которых зависит от степени насыщения машины нелинейно. Кроме этого изменяются значения активных сопротивлений статора и ротора при изменении температуры обмоток двигателя, что также необходимо учитывать.
Несмотря на указанные сложности, современные частотные приводы успешно функционируют, обеспечивая высокое качество процесса регулирования скорости.
























