Асинхронная машина имеет статор и ротор, разделённые воздушным зазором. Её активными частями являются обмотки и магнитопровод (сердечник); все остальные части - конструктивные, обеспечивающие необходимую прочность, жёсткость, охлаждение, возможность вращения и т. п.
Обмотка статора представляет собой трёхфазную (в общем случае - многофазную) обмотку, проводники которой равномерно распределены по окружности статора и пофазно уложены в пазах с угловым расстоянием 120 °. Фазы обмотки статора соединяют по стандартным схемам «треугольник» или «звезда» и подключают к сети трёхфазного тока. Магнитопровод статора перемагничивается в процессе изменения тока в обмотке статора, поэтому его набирают из пластин электротехнической стали для обеспечения минимальных магнитных потерь. Основным методом сборки магнитопровода в пакет является шихтовка.
По конструкции ротора асинхронные машины подразделяют на два основных типа: с короткозамкнутым ротором и с фазным ротором. Оба типа имеют одинаковую конструкцию статора и отличаются лишь исполнением обмотки ротора. Магнитопровод ротора выполняется аналогично магнитопроводу статора - из пластин электротехнической стали.
Асинхро́нная маши́на - электрическая машина переменного тока, частота вращения ротора которой не равна (в двигательном режиме меньше) частоте вращения магнитного поля, создаваемого током обмотки статора.
В ряде стран к асинхронным машинам причисляют также коллекторные машины. Второе название асинхронных машин - индукционные обусловлено тем, что ток в обмотке ротора индуцируется вращающимся полем статора. Асинхронные машины сегодня составляют большую часть электрических машин. В основном они применяются в качестве электродвигателей и являются основными преобразователями электрической энергии в механическую, причём в основном используются асинхронные двигатели с коротокозамкнутым ротором (АДКЗ).
Достоинства (для АДКЗ):
- Простота изготовления.
- Относительная дешевизна.
- Высокая надёжность в эксплуатации.
- Невысокие эксплуатационные затраты.
- Возможность включения в сеть без каких-либо преобразователей (для нагрузок, не нуждающихся в регулировке скорости).
Все вышеперечисленные достоинства являются следствием отсутствия механических коммутаторов в цепи ротора и привели к тому, что большинство электродвигателей, используемых в промышленности - это асинхронные машины, в исполнении АДКЗ.
Недостатки:
- Небольшой пусковой момент.
- Значительный пусковой ток.
- Низкий коэффициент мощности.
- Сложность регулирования скорости с необходимой точностью.
- Максимальная скорость двигателя ограничена частотой сети (для АДКЗ, питаемых непосредственно от трёхфазной сети 50 Гц - это 3000 об/мин).
- Сильная зависимость (квадратичная) электромагнитного момента от напряжения питающей сети (при изменении напряжения в 2 раза, вращающий момент изменяется в 4 раза; у ДПТ вращающий момент зависит от напряжения питания якоря в первой степени, что более благоприятно).
Самым совершенным подходом к устранению вышеуказанных недостатков - это питание двигателя через частотный преобразователь, в котором управление производится по сложным алгоритмам.
Устройство асинхронной машины. Неподвижная часть машины переменного тока называется статором, а подвижная часть -
ротором. Сердечники статора и ротора асинхронных машин собираются из листов электротехнической стали (рис. 19-1), которые до сборки обычно покрываются с обеих сторон масляно-канифольным изоляционным лаком. Сердечники машин малой мощности иногда собираются из листов без лакового покрытия, так как в этом случае достаточной изоляцией является естественный или искусственно созданный слой окислов на поверхности листов стали.
На рис. 19-2 представлена фотография асинхронного двигателя малой мощности в разобранном виде, на которой видны статор, ротор и подшипниковые щиты. На рис. 19-3 дан чертеж асинхронного двигателя средней мощности.
Рис. 19-1. Листы сердечников статора (1) и ротора (2) асинхронной машины малой и средней мощности
Сердечник статора закрепляется в корпусе, а сердечник ротора -на валу^ (машины малой и средней мощности) или на ободе с кое-стовинои и втулкой, надетой на вал (машины большой мощности) Вал ротора вращается в подшипниках, которые помещаются в подшипниковых щитах, прикрепляемых к корпусу статора (машины ковых "стопках 11 М0ЩН0Сти) " или на сдельно стоящих подшнпни
На ^внутренней цилиндрической поверхности статора и на внешней цилиндрической же поверхности ротора имеются пазы,

Рис. 19-2. Фотография асинхронного Двигателя с короткозамкнутым ротором типа А71-6 мощностью 14 кет в разобранном виде
в которых размещаются проводники обмоток статора и ротора. Обмотка статора выполняется обычно трехфазной (см. гл. 21); присоединяется к сети трехфазного тока и называется поэтому также первичной обмоткой. Обмотка ротора тоже может быть выполнена трехфазной аналогично обмотке статора. Концы фаз такой обмотки ротора соединяются обычно в звезду, а начала с помощью контактных колец и металлографитных щеток выводятся наружу (рис. 19-3). Такая асинхронная машина называется машиной с фазным ротором. К контактным кольцам обычно присоединяется трехфазный пусковой или регулировочный реостат. Фазная обмотка ротора выполняется с тем же числом полюсов магнитного поля, как и статор.
Другая разновидность обмотки ротора -обмотка в виде беличьей клетки (рис, 19-4). При этом в каждом пазу находится медный или алюминиевый стержень и концы всех стержней
с обоих торцов ротора соединены с медными или алюминиевыми же кольцами, которые замыкают стержни накоротко. Стержни от сердечника обычно не изолируются. В машинах мощностью до 1QG к&п стержни и кольца вместе с крылышками для вентиляции обычно изготовляются путем заливки ротора алюминием
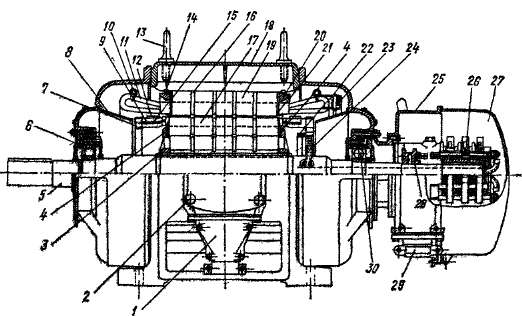
Рис 19-3 Трехфазный асинхронный двигатель с фазным ротором 180 кет,
975 об/мин
1 - кабельная муфта, 2 - выводная коробка концов обмотки статора, 3 - кольце--вые шпонки крепления сердечника ротора, 4 - нажимные шайбы сердечника ротора, 5 - вал рртора, 6 и 30 - шариковый и роликовый подшипники, 7 - медные соедини* тельные хомутики стержней обмотки ротора, 8 -^ диффузоры для направления поступающего, через подшитшковые щиты охлаждающего воздуха, 9 - стержни обмотки^ ротора, "10 - бандажные кольца, // - обмотка статора, 12 - проволочные бандажи,! ротора, 13 - подъемные кольца, /* - дуговые шпонки, 15 - кольцевые изоляционный прокладки, 16 - радиальные вентиляционные каналы, 17 - сердечник ротора, IS ->j литой корпус „статора, 19 - сердечник ст»тора, 20 и 21 - нажимные мдьщы и кольцу сердечника статора, 22 - кольцо для соединения концов обмотки ротора в звезду, 23 - « междукатушечные и междугрупповые соединения обмотки статора, 34 - выводы кок* цов обмотки ротора к контактным кольцам,. 25 и 27 - коробка и колпак контактных колец, 26 - контактные кольца, 28 - подвижная втулка с контактами для замыкана^. выводов обмотки ротора накоротко, 29 - муфта для вывода кондов обмотки ротрра
к внешней цепи
(см. рис. J9-2). Такая асинхронная машина называется машиной е короткозамкнутым ротором. Большинство аснш хронных машин, в особенности машины малой и средней мощности, выпускается с короткозамкнутым gpTopOM.
Воздушный зазор между статором и ротором в асинхронных машинах выполняется минимально возможным по условиям производства и надежности работы и тем больше, чем крупнее машины. В машинах мощностью в несколько киловатт величина зазора
составляет 0,4-0,5 мм, а в машинах большой мощности - несколько миллиметров.
Асинхронные машины, как правило, охлаждаются воздухом. Системы вентиляции в принципе являются такими же, как и у машин постоянного тока (см. § 8-5).
Вращающееся магнитное поле. На рис. 19-5 представлены поперечные разрезы двухполюсного (2р - 2) асинхронного двигателя и показан характер магнитного поля статора для двух моментов времени.
На рис. 19-5 изображена простейшая обмотка статора, когда каждая фаза состоит из одного витка или двух проводников (1-я фаза - проводники А и X, 2.-я фаза - проводники В и Y, 3-я фаза - проводники С и Z) 1 . Проводники каждого витка (фазы) расположены -друг от друга на расстоянии полюсного деления
где D a - диаметр внутренней расточки статора, ар - число пар полюсов.
На рис. 19-5 полюсное деление составляет замкнутая обмотка ро-половину окружности. Шаг витка или обмот- тора в виде беличьей ки у поэтому является полным {у = т). Двои- клетки
ному полюсному делению 2т соответствует угол по окружности статора 360° эл. Начала фаз А, В, С сдвинуты относительно друг друга на 120° эл., что в данном случае составляет треть окружности.
На рис. 19-5, а показаны направления токов в проводниках обмотки статора для момента времени, когда i a - I m и i b = i c =
- - *}т- Токи фаз на рис. 19-5 считаются положительными, когда
они в началах фаз (проводники А, В, С) направлены за плоскость чертежа. На рис. 19-5, б показаны направления токов для момента времени, когда фазы токов изменились на 30° и
Из рис. 19-5 видно, что распределение токов по окружности статора составляет две зоны, каждая Величиной т, причем направ-
1 Согласно ГОСТ 183-66, начала фаз обмоток статора обозначаются С 1(С 2 , С 3 , их концы - соответственно С 4 , С 8 , C g , а начала фаз обмоток ротора - Pi, P 2 > ^з-В данной книге в методических целях начала трехфазных обмоток всюду обозначаются А, В, С или а, Ь, с, а концы - соответственно Л, Y, Z или х, у, г.
![]()
ления токов в этих зонах противоположны. В нижней части рис. 19-5 изображены кривые распределения токов вдоль развернутого статора.
|Из этих кривых видно, что токи распределены на поверхности статора по синусоидальному закону.
Токи проводников обмотки статора двухполюсной машины создают, как следует из рис. 19-5, двухполюсный магнитный поток
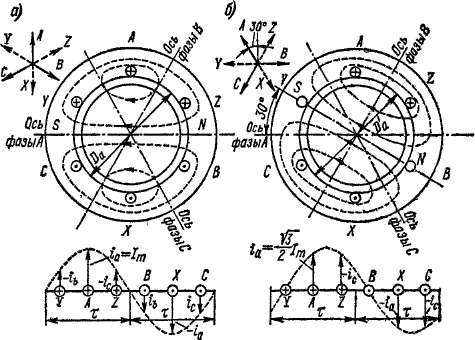
Рис. 19-5. Простейшая обмотка статора асинхронной машины с 2р = 2 и ее магнитное поле
Ф 1(проходящий через статор, ротор и воздушный зазор между ними. Из сравнения рис. 19-5, аи б видно, что при изменении фазы токов на 30° кривая распределения токов и магнитный поток поворачиваются в направлении следования фаз также на 30° эл.
Ось витка (обмотки) фазы А на рис. 19-5 направлена горизонтально, и ось магнитного потока при i a = l m (рис. 19-5, а) также направлена горизонтально. Ясно, что если фаза токов по сравнению с рис. 19-5, а изменится на 120° и поэтому будет i b = I m , то магнитный поток будет направлен по оси фазы В, т. е. повернется на 120° эл. В момент времени, когда i c - I m , ось магнитного потока совпадает с осью фазы С и т. д.
Таким образом, обмотка статора двухполюсной машины при питании ее трехфазным током создает двухполюсное вращающееся магнитное поле.
При этом за один период изменения тока поле поворачивается на 2 т или 360° эл.
Скорость вращения поля
n i - h об/сек,
где fi - частота тока статора.
Магнитное поле вращается в направлении чередования фаз А, В, С обмотки статора. Для изменения направления вращения поля на обратное достаточно переменить местами на зажимах обмот- У ки статора концы двух проводников, идущих от питающей сети.
При 2р = 4 полюсное деление составляет четверть окружности и каждая фаза простейшей трехфазной обмотки статора (рис. 19-6) состоит из двух витков с шагом у = х, которые сдвинуты относительно друг друга на 2т и могут быть соединены друг с другом последовательно или параллельно. Отдельные фазы и их начала А, В, С при этом также сдвинуты относительно друг друга на 120° эл. или в данном случае на 1 / 6 окружности. Из рис. 19-6 видно, что такая обмотка создает кривую распределения тока и магнитное поле с 2р = 4. Это поле также является вращающимся и за один
период тока поворачивается тоже на 2т или в данном случае на половину окружности, вследствие чего скорость поля
п г = у, обIсек.
В общем случае можно изготовить обмотку с 2р = 6, 8, 10 и т. д. При этом будет получаться кривая распределения тока и магнитное поле с р парами полюсов. Магнитное поле вращается со скоростью
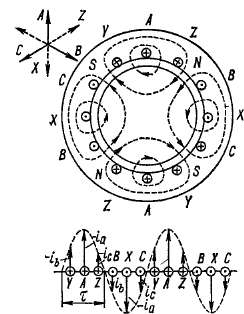
Рис. 19-6. Простейшая обмотка
статора асинхронной машины с
2р - 4 и ее магнитное поле

Линейная окружная скорость вращения поля вдоль окружности статора
При стандартной в СССР частоте промышленного тока / = 50 гц получаются скорости вращения поля, указанные в табл. 19-1.
Таблица 19-1
Скорость вращения магнитного поля обмоток с различными числами пар полюсов р при Л = 50 гц
| р | ||||||||||
| Пх, Об/MUH |
При конструировании обмоток переменного тока стремятся к тому (см. гл. 21), чтобы распределение индукции вращающегося поля в воздушном зазоре вдоль окружности было по возможности ближе к синусоидальному.
Ниже в данной главе будет предполагать, что это распределен ление является синусвидальным.
Принцип действия асинхронной машины. Магнитный поток Ф 1(создаваемый обмоткой статора (рис. 19-5 и 19-6), при своем вращении пересекает проводники обмотки ротора, индуктирует в них э. д. с. е п, и если обмотка ротора замкнута, то в ней возникают токи ц, частота которых f 2 при неподвижном роторе (я = 0) равна первичной частоте f t .
Если обмотка ротора является трехфазной, то в ней индуктируется трехфазных ток. Этот ток создает вращающийся поток ротора Ф 2 , число полюсов 2 р, направление и скорость вращения которого при п = 0
такие же, как и у потока статора. Поэтому потоки Ф г и Ф а вращаются синхронно и образуют общий вращающийся поток двигателя Ф. При короткозамкнутом роторе в его стержнях индуктируется многофазная система токов % со сдвигом в соседних Стержнях по фазе на угол
![]()

где Z 2 - число стержней ротора. Эти токи также создают вращающийся поток Ф 2 , число полюсов, направление и скорость вращения которого являются такими же, как и у потока фазного ротора. Поэтому и в данном случае в двигателе образуется общий магнитный поток Ф. Ввиду существования общего вращающегося магнитного поля можно рассматривать э. д. с, индуктируемые в обмотках этим полем.
В результате взаимодействия токов ротора с потоком возникают действующие на проводники ротора механические силы F и вращающий электромагнитный момент М.
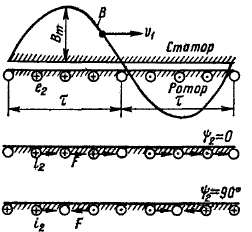
В верхней части рис. 19-7 показаны вращающаяся со скоростью i>i синусоидальная волна общего магнитного поля В мащины и направления э. д. с. е 2 , индуктируемых этим полем в стержнях неподвижного короткозамкнутого ротора. В нижней части рис. 19-7 показаны направления токов стержней, ц и действующих на них сил F для двух случаев: когда угол сдвига фаз"фа между е, и г 2 равен нулю и когда ■ф 2 = 90 , При % = 0 все силы действуют в сторону вращения- поля. Поэтому вращающий момент
Рис 19-7. Токи в стержнях обмотки ротора и действующие на них силы
отличен от нуля и также действует в сторону вращения поля. В то же время при т|э а = 90° силы действуют в разные стороны
и М = 0.
Отсюда следует, что вращающий момент создается только активной составляющей тока ротора
Этот вывод имеет общий характер и справедлив также для других видов машин переменного тока.
Цепь ротора асинхронного двигателя всегда обладает определенным активным сопротивлением, и поэтому при пуске двигателя {п = 0) всегда 0 < t|) 2 < 90°. В результате развиваемый момент М > Q, и если он больше статического тормозного момента на валу, то ротор двигателя придет во вращение в направлении вращения поля с некоторой скоростью п <; п ъ т. е. будет вращаться с некоторым отставанием, или скольжением, относительно поля статора,
![]()
![]()
Относительная разность скоростей вращения поля и ротора

называется скольжением. Скольжение выражается также в процентах:
Скорость ротора п, выраженная через скольжение s, согласно формуле (19-6), равна
При пуске двигателя (п = 0) имеем s = 1, а при вращении ротора синхронного с полем статора или, как говорят, с синхронной скоростью (п = п г) будет s = О. При п = п х магнитное поле статора относительно ротора неподвижно и токи в роторе индуктироваться не будут, поэтому М = 0 и такой скорости вращения двигатель достичь не может. Вследствие этого в режиме двигателя всегда 0 < /г <п х и l>s>0.
При вращении ротора в сторону поля частота пересечения полем проводников ротора пропорциональна разности скоростей tii - п и частота тока в обмотке ротора
Подставив сюда значение п из формулы (19-7) и затем значение п х из (19-2), получим
т. е. вторичная частота пропорциональна скольжению.
При частоте тока / 2 < f t скорость вращения поля ротора относительно самого ротора п 2р также меньше п г и на основании выражения (19-9)
Скорость вращения поля ротора относительно статора в соответствии с выражениями (19-7) и (19-10)
т. е. скорость вращения поля ротора относительно статора при любой скорости вращения ротора п равна скорости вращения поля статора п х. Поэтому поля статора и ротора при вращающемся роторе также вращаются всегда синхронно и образуют общее вращающееся поле.
Отметим, что представленная на рис. 19-7 картина направлений токов и механических сил действительна и при вращении ротора, когда 0 < п < п х (двигательный режим).
Если ротор асинхронной машины с помощью внешней силы (вращающего момента) привести во вращение в направлении вращения поля статора со скоростью выше синхронной (п > п г), то ротор будет обгонять поле и направления индуктируемых в обмотке ротора токов по сравнению с изображенными на рис. 19-7 изменяется на обратные. При этом изменяется на обратные также направления электромагнитных сил F и электромагнитного момента М. Момент М при этом будет тормозящим, а машина будет работать в режиме генератора и отдавать активную мощность в сеть. Согласно выражению (19-6), в режиме генератора s < 0.
Если ротор вращать в направлении, обратном направлению вращения поля статора (п < 0), то указанные на рис. 19-7 направления е 2 , / 2 и F сохраняется. Электромагнитный момент М будет действовать в направлении вращения поля статора, но будет тормозить вращение ротора. Этот режим работы асинхронной машины называется режимом противовключения или р е-жимом электромагнитного тормоза. В этом режиме в соответствии с выражением (19-6) s> 1.
Более подробно режимы работы асинхронной машины рассматриваются в последующем разделе. Здесь, однако, надо отметить, что соотношение (19-11), как нетрудно усмотреть, сохраняется при любом режиме работы, при любом значении s, т. е. поля статора и ротора вращаются синхронно в любом режиме работы асинхронной машины.
Асинхронная машина – это бесколлекторная машина переменного тока, у которой при работе возбуждается вращающееся магнитное поле, но ротор вращается асинхронно, т.е. с угловой скоростью, отличной от угловой скорости поля.
Асинхронные двигатели являются самыми распространенными из всех двигателей. Их преимущества состоят в простоте устройства, большой надежности и сравнительно низкой стоимости.
Широко применяются трехфазные асинхронные двигатели, предложенные М.О. Доливо-Добровольским в 1888 г. Они выполняются мощностью от долей ватта до тысяч киловатт, с частотой вращения от 500 до 3000 об/мин и напряжением до 10 кВ. Однофазные асинхронные двигатели используют для привода бытовых приборов, электроинструмента, в схемах автоматики. Они питаются от однофазной цепи и имеют мощность, как правило, не выше 0,5 кВт.
Асинхронные машины могут работать в режиме генератора. Но как источники электрической энергии они почти не применяются, так как не имеют собственного источника возбуждения магнитного потока и по своим показателям уступают синхронным генераторам.
Асинхронные машины применяют в качестве регуляторов напряжения, фазорегуляторов, преобразователей частоты и др.
Недостатками асинхронных машин являются сложность и неэкономичность регулирования их эксплуатационных характеристик.
Асинхронный двигатель состоит из статора, ротора и подшипниковых щитов. Статор – неподвижная часть двигателя – имеет цилиндрическую форму. Он состоит из корпуса, сердечника и обмотки. Корпус литой стальной или чугунный. Магнитопровод статора собирается из тонких листов электротехнической стали. На внутренней поверхности он имеет пазы, в которые укладывается обмотка статора. Ротор асинхронного двигателя – вращающаяся часть – состоит из стального вала, магнитопровода, набранного из листов электротехнической стали с выштампованными пазами. Обмотка ротора бывает короткозамкнутой или фазной. Короткозамкнутая обмотка выполняется из алюминиевых или медных стержней, замкнутых с обоих торцов ротора накоротко. Фазный ротор имеет трехфазную обмотку, соединенную в звезду. Выводы обмотки подсоединены к кольцам на валу и с помощью щеток подсоединяются к реостату или другому устройству. Вращающийся ротор размещают на общем валу cо статором. Вал вращается в подшипниковых щитах. Соединение обмотки статора осуществляется в коробке, в которую выведены начала фаз С 1 , С 2 , С 3 и концы фаз С 4 , С 5 , С 6 . На рис. показаны схемы расположения этих выводов (а) и способы соединения их между собой при соединении фазных обмоток звездой (б) и треугольником (в).
Если в паспорте двигателя указаны два напряжения, например, 380/220, то большему напряжению соответствует соединение звездой, более меньшему – треугольником. В обоих случаях напряжение на фазе двигателя равно 220 В.
Трехфазная
обмотка статора создает магнитное поле,
вращающееся со скоростью .
.
Электромагнитное взаимодействие между статором и ротором возникает только при неравенстве скорости поля статора и скорости вращения ротора.
Вращающее магнитное поле статора асинхронной машины. Частота вращения поля статора, скольжение(Характеристики).
Основой действия асинхронного двигателя является вращающееся магнитное поле. Принцип получения вращающегося магнитного поля заключается в том, что если по системе проводников, распределенных в пространстве по окружности, протекают токи, сдвинутые по фазе, то в пространстве создается вращающееся поле.
Р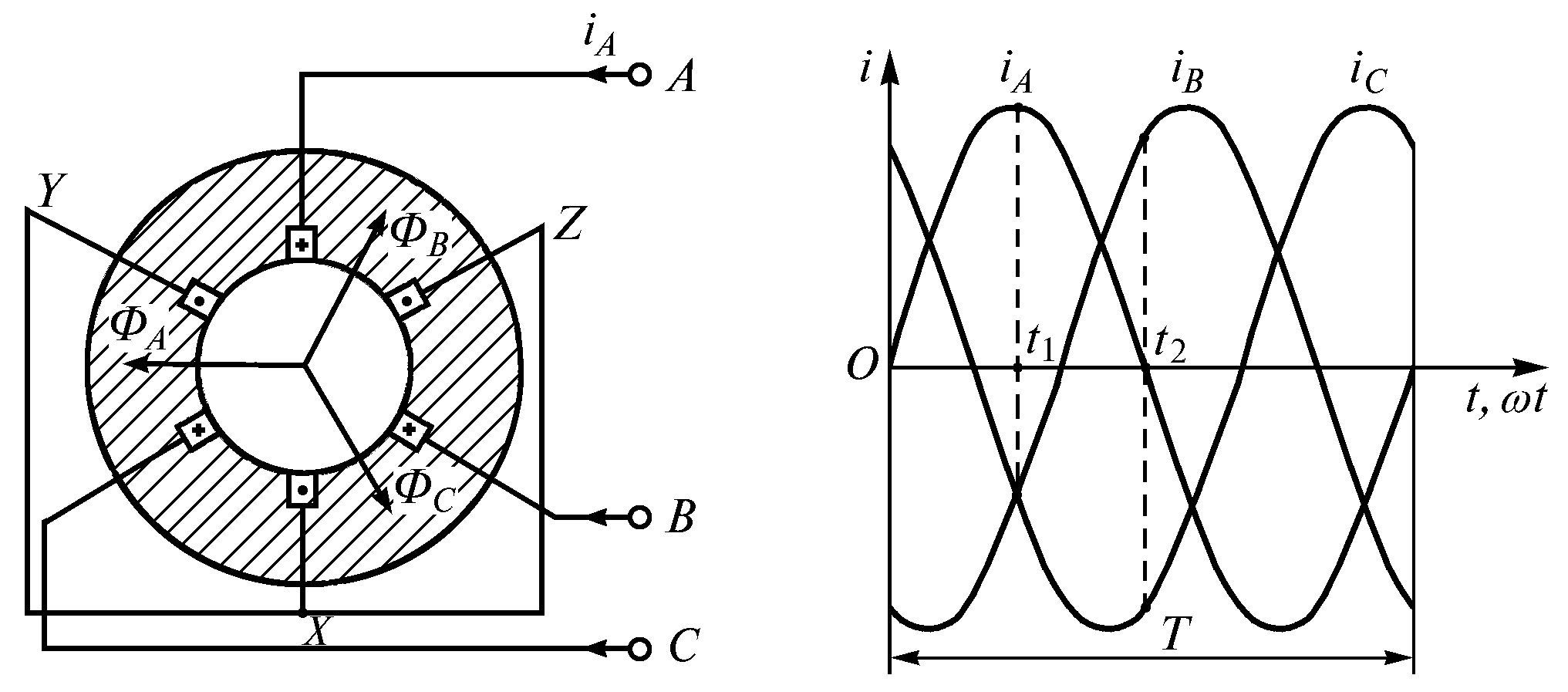 ассмотрим
получение вращающегося поля в трехфазном
двигателе. На рис. 1 показаны три фазные
обмоткиA
–
X
,
B
– Y
,
C
– Z
,
каждая в виде одного витка. От источника
питания к обмоткам подводится трехфазная
система токов
ассмотрим
получение вращающегося поля в трехфазном
двигателе. На рис. 1 показаны три фазные
обмоткиA
–
X
,
B
– Y
,
C
– Z
,
каждая в виде одного витка. От источника
питания к обмоткам подводится трехфазная
система токов ;
;![]() ;
; .
.
Если
фазы обмотки статора подключить к
3-фазному току сети, возникают токи,
которые создают магнитное полу с
индукцией:
 ;
; ;.
Составляющая индукции поля вдоль осиX
равна алгебраической сумме проекций
на эту ось мгновенных значений индукций
отдельных фаз, т.е.
;.
Составляющая индукции поля вдоль осиX
равна алгебраической сумме проекций
на эту ось мгновенных значений индукций
отдельных фаз, т.е.
 .
Аналогично находим проекцию на ось Y.
.
Аналогично находим проекцию на ось Y.
 .
В результате магнитная индукция поля
статора равна:
.
В результате магнитная индукция поля
статора равна:
Индукция
магнитного поля является const,
а само поле статора имеет проекции на
оси X
и Y
соответственно:
В-ор
индукции рез-го поля расположен к оси
ординат под углом

 ,
,
 ,
гдеT-период изменения
тока,
,
гдеT-период изменения
тока, -циклическая
частота
-циклическая
частота
Таким образом, трехфазная обмотка, питаемая сдвинутыми на 120° токами, создает вращающееся магнитное поле. Результирующий поток остается неизменным и равным 1,5 от максимального потока фазы. Направление этого потока всегда совпадает с направлением магнитного потока той фазы, ток в которой в данный момент максимален. Поэтому для изменения направления вращения необходимо поменять местами любые две фазы.
Рассмотренные примеры относятся к двухполюсному исполнению обмотки () при частоте вращения поля. В общем случае частота вращения поля, где– число пар полюсов машины;– частота тока статора.
Величина
или называетсяскольжением
асинхронной машины, где
называетсяскольжением
асинхронной машины, где
 - частота вращения поля статора,
- частота вращения поля статора, - частота вращения ротора.
- частота вращения ротора.
В зависимости от соотношения иразличают три режима работы: в режиме двигателя; в режиме генератора; в режиме электромагнитного тормоза.
Работа в режиме двигателя. Электромагнитные силы взаимодействия магнитных полей статора и ротора создают вращающий момент в направлении вращения поля статора. Скорость , с которой вращается двигатель, зависит от его нагрузки. При холостом ходе скоростьстановится почти равной, так как при= 0 ЭДС и токи в роторе равны нулю и электромагнитное взаимодействие исчезает. Таким образом, асинхронная машина работает в режиме двигателя в пределах от= 0 до, т.е. при скольжении от+1 до0. При этом электрическая энергия, подводимая к статору из сети, преобразовывается в механическую энергию на валу.
Работа
в режиме генератора.
Предположим, что подключенный к сети
статор создает вращающееся магнитное
поле, а ротор приводится во вращение в
том же направлении со скоростью
.
В этом случае скольжение будет
отрицательным, а ЭДС и токи ротора
изменяют направление по сравнению с
работой в режиме двигателя. Момент
на валу становится тормозящим по
отношению к вращающему моменту
первичного двигателя. Асинхронная
машина работает генератором.
Механическая энергия, подведенная к
валу, преобразовывается в электрическую
энергию и отдается в сеть. Таким образом,
асинхронная машина может работать в
режиме генератора параллельно с
сетью в пределах отдо,
т.е. при скольжении от до.
до.
Работа в режиме электромагнитного тормоза. Допустим, что ротор приводится во вращение против направления вращения магнитного потока статора. В этом случае к асинхронной машине подводится энергия с двух сторон – электрическая из сети и механическая от первичного двигателя. Такой режим работы называется режимом электромагнитного тормоза. Он возникает при скольжении от до.
 -
максимальный момент
-
максимальный момент
 -
пусковой момент
-
пусковой момент
 -
номинальный момент
-
номинальный момент
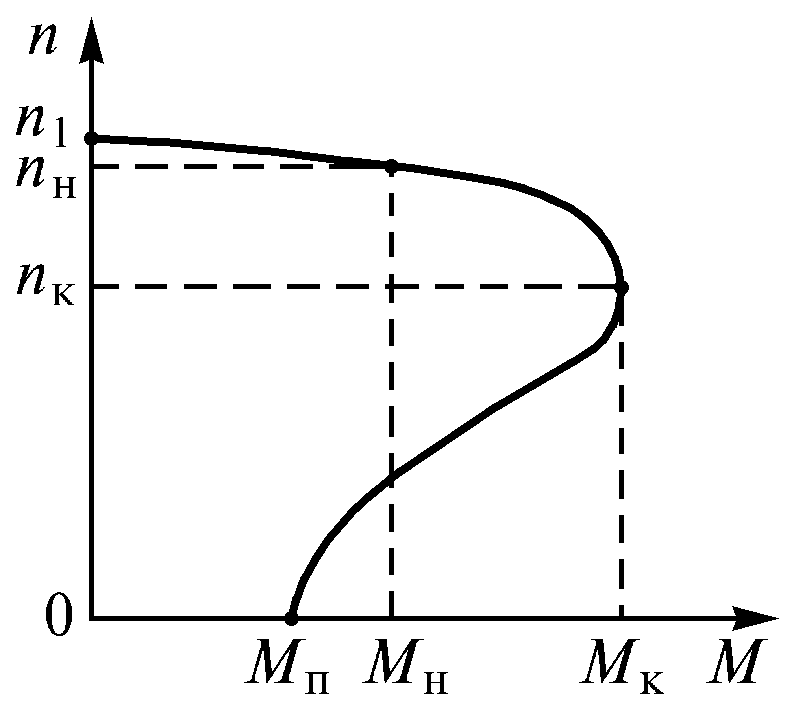
Механической характеристикой двигателя называется зависимость частоты вращения ротора от момента на валу . Так как при нагрузке момент холостого хода мал, тои механическая характеристика представляется зависимостью. Если учесть взаимосвязь, то механическую характеристику можно получить представив ее графическую зависимость в координатахи
В ряде стран к асинхронным машинам причисляют также коллекторные машины. Второе название асинхронных машин - индукционные вследствие того, что ток в обмотке ротора индуцируется вращающимся полем статора. Асинхронные машины сегодня составляют большую часть электрических машин. В основном они применяются в качестве электродвигателей и являются основными преобразователями электрической энергии в механическую.
Достоинства:
- Лёгкость в изготовлении.
- Отсутствие механического контакта со статической частью машины.
Недостатки:
- Небольшой пусковой момент.
- Значительный пусковой ток.
История
Приоритет в создании асинхронного двигателя принадлежит Николе Тесла , который в Будапеште весной 1882 г. решил проблему создания вращающегося магнитного поля при помощи неподвижной многофазной обмотки переменного тока, а в 1884 г. в Страсбурге продемонстрировал действующую модель своего двигателя. Вклад в развитие асинхронных двигателей внес Галилео Феррарис , который в 1885 г. в Италии построил модель асинхронного двигателя мощностью 3 Вт. В 1888 г. Феррарис опубликовал свои исследования в статье для Королевской Академии Наук в Турине (в том же году, Тесла получил патент США 381,968 от 01.05.1888 (U.S. Patent 0 381 968 |заявка на изобретение № 252132 от 12.10.1887), в которой изложил теоретические основы асинхронного двигателя. Заслуга Феррариса в том, что сделав ошибочный вывод о небольшом к.п.д. асинхронного двигателя и о нецелесообразности применения систем переменного тока, он привлек внимание многих инженеров к проблеме совершенствования асинхронных машин. Статья Галилео Феррариса, опубликованная в журнале «Атти ди Турино», была перепечатана английским журналом и была прочитана в июле 1888 г. выпускником Дармштадтского Высшего технического училища, выходцем из России Михаилом Осиповичем Доливо-Добровольским . Уже в 1889 г. Доливо-Добровольский получил патент на трехфазный асинхронный двигатель с короткозамкнутым ротором типа «беличья клетка», а в 1890 г. - патенты в Англии № 20425 и Германии № 75361 на трёхфазный асинхронный двигатель с фазным ротором. Данные изобретения открыли эру массового индустриального применения электрических машин. В настоящее время асинхронный двигатель является самым распространенным электродвигателем.
Конструкция
Асинхронная машина имеет статор и ротор , разделённые воздушным зазором. Её активными частями являются обмотки и магнитопровод (сердечник); все остальные части - конструктивные, обеспечивающие необходимую прочность, жёсткость, охлаждение, возможность вращения и т. п.
Обмотка статора представляет собой трёхфазную (в общем случае - многофазную) обмотку, проводники которой равномерно распределены по окружности статора и пофазно уложены в пазах с угловым расстоянием 120 эл.град. Фазы обмотки статора соединяют по стандартным схемам «треугольник» или «звезда» и подключают к сети трёхфазного тока. Магнитопровод статора перемагничивается в процессе изменения тока в обмотке статора, поэтому его набирают из пластин электротехнической стали для обеспечения минимальных магнитных потерь. Основным методом сборки магнитопровода в пакет является шихтовка.
По конструкции ротора асинхронные машины подразделяют на два основных типа: с короткозамкнутым ротором и с фазным ротором. Оба типа имеют одинаковую конструкцию статора и отличаются лишь исполнением обмотки ротора. Магнитопровод ротора выполняется аналогично магнитопроводу статора - из пластин электротехнической стали.
Короткозамкнутый ротор
Ротор асинхронной машины типа «беличья клетка»
Короткозамкнутая обмотка ротора, часто называемая «беличья клетка» из-за внешней схожести конструкции, состоит из медных или алюминиевых стержней, замкнутых накоротко с торцов двумя кольцами. Стержни этой обмотки вставляют в пазы сердечника ротора. Сердечники ротора и статора имеют зубчатую структуру. В машинах малой и средней мощности обмотку обычно изготавливают путём заливки расплавленного алюминиевого сплава в пазы сердечника ротора. Вместе со стержнями «беличьей клетки» отливают короткозамыкающие кольца и торцевые лопасти, осуществляющие вентиляцию машины. В машинах большой мощности «беличью клетку» выполняют из медных стержней, концы которых соединяют с короткозамыкающими кольцами при помощи сварки.
Зачастую пазы ротора или статора делают скошенными для уменьшения высших гармонических ЭДС , вызванных пульсациями магнитного потока из-за наличия зубцов, магнитное сопротивление которых существенно ниже магнитного сопротивления обмотки, а также для снижения шума, вызываемого магнитными причинами. Для улучшения пусковых характеристик асинхронного электродвигателя с короткозамкнутым ротором, а именно, увеличения пускового момента и уменьшения пускового тока, на роторе применяют специальную форму паза. При этом внешняя от оси вращения часть паза ротора имеет меньшее сечение чем внутренняя. Это позволяет использовать эффект вытеснения тока, за счет которого увеличивается активное сопротивление обмотки ротора при больших скольжениях (при пуске).
Асинхронные двигатели с короткозамкнутым ротором имеют небольшой пусковой момент и значительный пусковой ток, что является существенным недостатком «беличьей клетки». Поэтому их применяют в тех электрических приводах, где не требуются большие пусковые моменты. Из достоинств следует отметить лёгкость в изготовлении, и отсутствие электрического контакта со статической частью машины, что гарантирует долговечность и снижает затраты на обслуживание. При специальной конструкции ротора, когда вращается в воздушном зазоре только полый цилиндр из алюминия, можно достичь малой инерционности двигателя.
Фазный ротор
Фазный ротор имеет трёхфазную (в общем случае - многофазную) обмотку, обычно соединённую по схеме «звезда» и выведенную на контактные кольца , вращающиеся вместе с валом машины. С помощью графитовых или металлографитовых щёток, скользящих по этим кольцам, в цепь обмотки ротора:
- включают пускорегулирующий реостат , выполняющий роль добавочного активного сопротивления, одинакового для каждой фазы. Снижая пусковой ток, добиваются увеличения пускового момента до максимального значения (в первый момент времени). Такие двигатели применяются для привода механизмов, которые пускают в ход при большой нагрузке или требующих плавного регулирования скорости.
- включают индуктивности (дроссели) в каждую фазу ротора. Сопротивление дросселей зависит от частоты протекающего тока, а, как известно, в роторе в первый момент пуска частота токов скольжения наибольшая. По мере раскрутки ротора частота индуцированных токов снижается, и вместе с нею снижается сопротивление дросселя. Индуктивное сопротивление в цепи фазного ротора позволяет автоматизировать процедуру запуска двигателя, а при необходимости - «подхватить» двигатель, у которого упали обороты из-за перегрузки. Индуктивность держит токи ротора на постоянном уровне.
- включают источник постоянного тока, получая таким образом синхронную машину .
- включают питание от инвертора, что позволяет управлять оборотами и моментными характеристиками двигателя. Это особый режим работы (машина двойного питания). Возможно включение напряжения сети без инвертора, с фазировкой, противоположной той, которой запитан статор.
Двигатель Шраге-Рихтера
Трёхфазный коллекторный асинхронный двигатель с питанием со стороны ротора .
Обращенный (питание с ротора) асинхронный двигатель, позволяющий плавно регулировать скорость от минимальной (диапазон определяется обмоточными данными добавочной обмотки, используемой для получения добавочной э.д.с., вводимой с частотой скольжения во вторичную цепь машины) до максимальной, лежащей обычно выше скорости синхронизма. Физически производится изменением раствора двойного комплекта щеток на каждую «Фазу» вторичной цепи двигателя. Таким образом, переставляя при помощи механического устройства (штурвал или иное исполнительное устройство)щеточные траверсы являлось возможным весьма экономично управлять скоростью асинхронного двигателя переменного тока. Идея управления в общем предельно проста и будет реализована впоследствии в так называемых асинхронно-вентильных каскадах, где в цепь фазного ротора включали тиристорный преобразователь, работавший инвертором или в выпрямительном режиме. Сущность идеи - во вторичную цепь асинхронного двигателя вводится добавочная э.д.с. изменяемой амплитуды и фазы с частотой скольжения. Задачу согласования частоты добавочной э.д.с с частотой скольжения ротора выполняет коллектор. Если добавочная э.д.с. противонаправлена основной, производится вывод мощности из вторичной цепи двигателя с соответствующим уменьшением скорости машины, ограничение скорости вниз диктуется только условиями охлаждения обмоток). В точке синхронизма машины частота добавочной э.д.с. равна нулю, то есть во вторичную цепь коллектором подается постоянный ток. В случае суммирования добавочной э.д.с. с основной производится инвертирование добавочной мощности во вторичную цепь машины, и соответственно - разгон выше синхронной частоты вращения. Таким образом, результатом регулирования являлось семейство достаточно жестких характеристик с уменьшением критического момента при снижении скорости, а при разгоне выше синхронной скорости - с его пропорциональным увеличением.
Определенный интерес представляет собой работа машины с несимметричным раствором щеточных траверс. В этом случае векторная диаграмма добавочной э.д.с. двигателя получает так называемую тангенциальную составляющую, делающую возможным работу с емкостной реакцией на сеть.
Конструкционно двигатель представляет собой обращенную машину, где на роторе уложены две обмотки: питание с питанием с контактных колец и обмотку, соединяемую посредством двух пар щеток на «фазу» со вторичной обмоткой статора. Фактически, эти две части вторичной обмотки в зависимости от положения щеточных траверс включается то согласно друг другу, то встречно. Так осуществляется регулирование.
Наибольшее развитие такие двигатели получили в 30-е годы XX века . В Советском Союзе с его низкой производственной культурой электротехнической промышленности коллекторные машины переменного тока (к.м.п.т.) не получили сколько-нибудь заметного распространения и развития в силу повышенных требований к изготовлению коллекторно-щеточного узла и общей высокой стоимости. На территорию СССР они проникали в основном в составе приобретенного за границей оборудования и при первой возможности заменялись менее эффективными, но более дешевыми машинами постоянного тока или асинхронными двигателями с фазным ротором. Существующие методики расчета к.м.п.т. разработанные академиком М. П. Костенко (в его учебниках асинхронные машины делятся на коллекторные и бесколлекторные) считают достаточным критерием работоспособности машины проверкой ее по условияем коммутации (для сравнения - для двигателя постоянного тока критическим является тепловой расчет).
В настоящее время двигатель Шраге представляет интерес исключительно как великолепное наглядное пособие для студентов. По словам преподавателя кафедры электропривода Липецкого Технического университета Л. Я. Теличко «лучшей модели, где теорию и практику каскада можно потрогать руками, найти невозможно».
Принцип действия
На обмотку статора подается переменное напряжение, под действием которого по этим обмоткам протекает ток и создает вращающееся магнитное поле. Магнитное поле воздействует на обмотку ротора и по закону электромагнитной индукции наводит в них ЭДС. В обмотке ротора под действием наводимой ЭДС возникает ток. Ток в обмотке ротора создаёт собственное магнитное поле, которое вступает во взаимодействие с вращающимся магнитным полем статора. В результате на каждый зубец магнитопровода ротора действует сила, которая, складываясь по окружности, создает вращающий электромагнитный момент, заставляющий ротор вращаться.
Скорость вращения поля статора
При питании обмотки статора трёхфазным (в общем случае - многофазным) током создаётся вращающееся магнитное поле, синхронная частота вращения [об/мин] которого связана с частотой сети [Гц] соотношением:
,где - число пар магнитных полюсов обмотки статора.
В зависимости от количества числа пар полюсов возможны следующие значения частот вращения магнитного поля статора, при частоте питающего напряжения 50 Гц:
| n, об/мин | |
|---|---|
| 3000 | 1 |
| 1500 | 2 |
| 1000 | 3 |
| 300 | 10 |
Большинство двигателей имеют 1-3 пары полюсов, реже 4. Большее число полюсов используется очень редко, такие машины имеют низкий КПД и коэффициент мощности, однако позволяют очень плавно и медленно вращать ротор двигателя.
Режимы работы
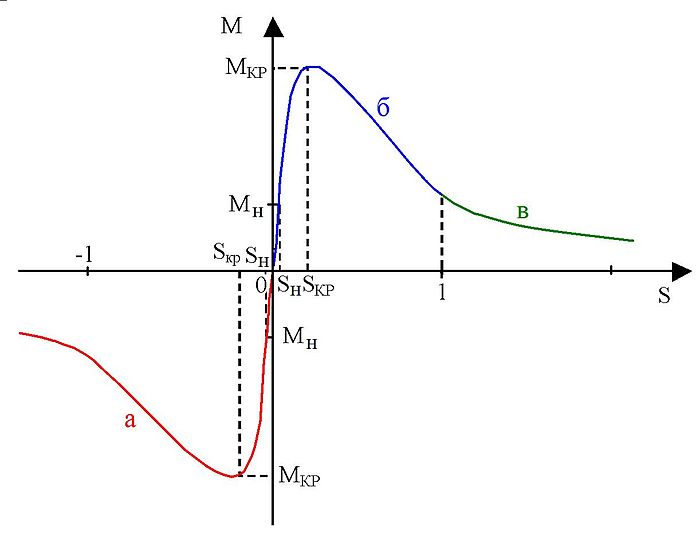
Механическая характеристика асинхронной машины: а - режим рекуперации энергии в сеть (генераторный режим), б - двигательный режим, в - режим противовключения (режим электромагнитного тормоза).
Двигательный режим
Если ротор неподвижен или частота его вращения меньше синхронной, то вращающееся магнитное поле пересекает проводники обмотки ротора и индуцирует в них ЭДС, под действием которой в обмотке ротора возникает ток. На проводники с током этой обмотки (а точнее, на зубцы сердечника ротора), действуют электромагнитные силы; их суммарное усилие образует электромагнитный вращающий момент, увлекающий ротор вслед за магнитным полем. Если этот момент достаточен для преодоления сил трения, ротор приходит во вращение, и его установившаяся частота вращения [об/мин] соответствует равенству электромагнитного момента тормозному, создаваемого нагрузкой на валу, силами трения в подшипниках, вентиляцией и т. д. Частота вращения ротора не может достигнуть частоты вращения магнитного поля, так как в этом случае угловая скорость вращения магнитного поля относительно обмотки ротора станет равной нулю, магнитное поле перестанет индуцировать в обмотке ротора ЭДС и, в свою очередь, создавать вращающий момент; таким образом, для двигательного режима работы асинхронной машины справедливо неравенство:
.Относительная разность частот вращения магнитного поля и ротора называется скольжением :
.Очевидно, что при двигательном режиме .
Генераторный режим
Если ротор разогнать с помощью внешнего момента (например, каким-либо двигателем) до частоты, большей частоты вращения магнитного поля, то изменится направление ЭДС в обмотке ротора и активной составляющей тока ротора, то есть асинхронная машина перейдёт в генераторный режим . При этом изменит направление и электромагнитный момент, который станет тормозным. В генераторном режиме работы скольжение .
Для работы асинхронной машины в генераторном режиме требуется источник реактивной мощности, создающий магнитное поле. При отсутствии первоначального магнитного поля в обмотке статора поток создают с помощью постоянных магнитов, либо при активной нагрузке за счёт остаточной индукции машины и конденсаторов, параллельно подключенных к фазам обмотки статора.
Асинхронный генератор потребляет реактивный ток и требует наличия в сети генераторов реактивной мощности в виде синхронных машин, синхронных компенсаторов , батарей статических конденсаторов (БСК). Из-за этого, несмотря на простоту обслуживания, асинхронный генератор применяют сравнительно редко, в основном в качестве ветрогенераторов малой мощности, вспомогательных источников небольшой мощности и тормозных устройств. Зато генераторный режим асинхронного двигателя используется довольно часто. В таком режиме работают двигатели эскалаторов метро, которые едут вниз. В генераторном режиме работают двигатели лифтов, в зависимости от соотношения веса в кабине и в противовесе.
Режим холостого хода
Режим холостого хода асинхронного двигателя возникает при отсутствии на валу нагрузки в виде редуктора и рабочего органа. Из опыта холостого хода могут быть определены значения намагничивающего тока и мощности потерь в магнитопроводе, в подшипниках, в вентиляторе. В режиме реального холостого хода s =0,01-0,08. В режиме идеального холостого хода n 2 =n 1 , следовательно s =0 (на самом деле этот режим недостижим, даже при допущении, что трение в подшипниках не создаёт свой момент нагрузки - сам принцип работы двигателя подразумевает отставание ротора от поля статора для создания поля ротора. При s =0 поле статора не пересекает обмотки ротора и не может индуцировать в нём ток, а значит не создаётся магнитное поле ротора.)
Режим электромагнитного тормоза (противовключение)
Если изменить направление вращения ротора или магнитного поля так, чтобы они вращались в противоположных направлениях, то ЭДС и активная составляющая тока в обмотке ротора будут направлены так же, как в двигательном режиме, и машина будет потреблять из сети активную мощность. Однако электромагнитный момент будет направлен встречно моменту нагрузки, являясь тормозящим. Для режима справедливы неравенства:
Этот режим применяют кратковременно, так как при нём в роторе выделяется много тепла, которое двигатель не способен рассеять, что может вывести его из строя.
Для более мягкого торможения может применяться генераторный режим, но он эффективен только при оборотах, близких к номинальным.
Способы управления асинхронным двигателем
Под управлением асинхронным двигателем переменного тока понимается изменение частоты вращения ротора и/или его момента. Существуют следующие способы управления асинхронным двигателем:
- реостатный - изменение частоты вращения АД с фазным ротором путём изменения сопротивления реостата в цепи ротора, кроме того это увеличивает пусковой момент;
- частотный - изменение частоты вращения АД путём изменения частоты тока в питающей сети, что влечёт за собой изменение частоты вращения поля статора . Применяется включение двигателя через частотный преобразователь;
- переключением обмоток со схемы «звезда» на схему «треугольник» в процессе пуска двигателя, что даёт снижение пусковых токов в обмотках примерно в три раза, но в то же время снижается и момент;
- импульсный - подачей напряжения питания специального вида (например, пилообразного);
- введение добавочной э.д.с согласно или противонаправлено с частотой скольжения во вторичную цепь;
- изменением числа пар полюсов, если такое переключение предусмотрено конструктивно (только для к.з. роторов);
- изменением амплитуды питающего напряжения, когда изменяется только амплитуда (или действующее значение) управляющего напряжения. Тогда вектора напряжений управления и возбуждения остаются перпендикулярны (автотрансформаторный пуск);
- амплитудно-фазовый способ включает в себя два описаных способа;
- включение в цепь питания статора реакторов ;
Примечания
См. также
- Вешеневский С. Н. Характеристики двигателей в электроприводе. Издание 6-е, исправленное. Москва, Издательство «Энергия», 1977. Тираж 40000 экз. УДК 62-83:621,313.2
Ссылки
- Устройство и принцип действия асинхронных электродвигателей
- Гайдуллин Александр «Сборка асинхронного двигателя 4А200»
- Асинхронный электродвигатель трехфазного тока М. О. Доливо-Добровольского
| |||||||||||
























