Электромагнитный момент генератора постоянного тока
Сила, воздействующая на проводник с током равна . Для расчета принимаем индукцию на полюсном делении среднюю величину. Ток во всех проводниках одинаков, индукция средняя, каждый проводник практически пересекает магнитную линию перпендикулярных. Исходя из этого, можно суммарную силу всех проводников сосредоточить в одном проводнике.
Где - число проводников обмотки якоря. Электромагнитный момент , ![]() , заменим , , получим , где: , - поток, тогда
, заменим , , получим , где: , - поток, тогда
| |
Электромагнитный момент зависит от потока и тока якоря. В генераторном режиме электромагнитный момент является тормозным. Уравнение равновесного состояния моментов запишется , где:
Механический момент на валу генератора
Момент холостого хода
Электромагнитный момент
6. Реакция якоря в машинах постоянного тока
В режиме холостого хода генератора постоянного тока ток возбуждения создает основной поток, который при вращении якоря наводит в обмотке якоря ЭДС. Поток при холостом ходе имеет симметричный характер, рис. 18. Если якорную цепь подключить к нагрузке, то по обмотке якоря будет протекать ток, который создаст свой поток.
Взаимодействие потока якоря с потоком основных полюсов и называется реакцией якоря. Картину распределения потока якоря можно представить на рис. 19.
При холостом ходе генератора ЭДС, наводимая в обмотке якоря, определяется по правилу правой руки. Подключив нагрузку, в якоре появится ток с тем же направлением что и ЭДС. Ток создаст поток, который, взаимодействуя с потоком основных полюсов, создаст результирующий поток. За счет потока якоря набегающий край полюса будет размагничиваться, а сбегающий край полюса намагничиваться, рис. 20. Физическая нейтраль у генератора будет сдвигаться по ходу вращения якоря. Она перпендикулярна результирующему потоку.
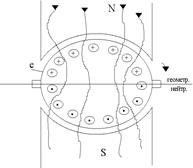
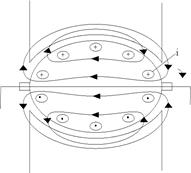
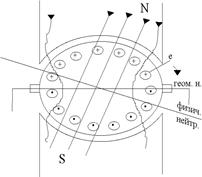
рис. 18 рис. 19 рис. 20
![]()
 Реакция якоря у двигателя противоположна генератору.
Реакция якоря у двигателя противоположна генератору.
Генератор Двигатель
При одинаковом направлении вращения якоря, независимо от режима работы, направление ЭДС в якоре одинаково. В двигательном режиме ток якоря направлен встречно ЭДС, поэтому реакция якоря двигателя противоположна генератору, т.е. набегающий край полюса будет намагничиваться, а сбегающий край полюса размагничиваться.
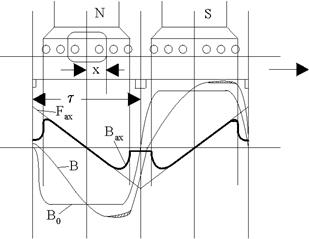
Рассмотрим намагничивающую силу реакции якоря, магнитную индукцию якоря и результирующую индукцию на полюсном делении.
Для рассмотрения намагничивающей силы реакции якоря введем понятие о линейной нагрузке якоря – ток приходящийся на единицу длины окружности якоря.
![]()
Путем введения этой величины можно условно заменить зубчатый якорь гладким, у которого линейная нагрузка равномерно распределена по всей поверхности. У реального якоря ток находится только в пазах, что осложняет расчет.
По закону полного тока следует, что намагничивающая сила по замкнутому контуру равна полному току, который охватывается этим контуром, а полный ток на данной длине определяется линейной нагрузкой.
Поэтому намагничивающая сила реакции якоря - линейный закон.
 При , ; , .
При , ; , .
Определим закономерность индукции якоря. - линейный закон сохраняется под полюсами, а между полюсами за счет большого сопротивления воздуха кривая индукции имеет провал. (), рис. 21. При холостом ходе индукция
рис.21 имеет вид близкий к трапеции.
Результирующая кривая индукции имеет искаженный характер, т. е. набегающий край полюса размагничивается, а сбегающий намагничивается. Щетки установлены на нейтрали. Реакция якоря при этом будет поперечная, рис. 22.
|
|
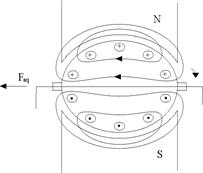

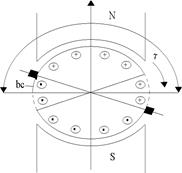
рис.22 рис.23 рис.24
Если щетки установить вдоль полюсов, реакция якоря будет продольно размагничивающая, рис. 23. Если щетки генератора сдвинуть на дугу () по направлению вращения то реакцию якоря можно разложить по осям, рис. 24.
![]() , ,
, ,
где: - поперечная ось
Продольная ось.
Поперечная намагничивающая сила искажает магнитный поток, а продольная размагничивает.
Реакция якоря влияет на все характеристики генераторов постоянного тока.
7.Генератор независимого возбуждения
 Свойства генератора определяются его характеристиками. 1.Характеристика холостого хода: , ,
Свойства генератора определяются его характеристиками. 1.Характеристика холостого хода: , ,
 Пунктирная - расчетная характеристика холостого хода.
Пунктирная - расчетная характеристика холостого хода.
Характеристика холостого хода позволяет судить о степени насыщения магнитной цепи. 2. Нагрузочная характеристика: , ![]() , .
, .
Треугольник - характеристический. Катет - ток возбуждения, который идет на компенсацию реакции якоря.
3. Внешняя характеристика: , .
8.Генератор параллельного возбуждения
Генератор параллельного возбуждения – это генератор с самовозбуждением. Обмотка возбуждения питается от якорной цепи. Для того, чтобы генератор возбудился, необходимо выполнить ряд условий:
3. Сопротивление цепи возбуждения должно быть меньше критического, т. е. .
Процесс самовозбуждения происходит при холостом ходе .
Процесс самовозбуждения происходит в следующем порядке: при включении асинхронного двигателя в сеть, якорь генератора начинает вращаться. Остаточный поток, пересекая проводники якоря, наводит в них . Под действием этой по обмотке возбуждения начинает протекать ток, который создает поток . Если этот поток направлен согласно с остаточным потоком, то общий поток возрастет, возрастает и наводимая в якоре. А это приведет к увеличению тока и потока и т. д.
Машина возбудится. Процесс возбуждения будет лавинообразным.
Третьим условием самовозбуждения является: , рис. 33.
 Прямая - вольтамперная характеристика цепи возбуждения. .
Прямая - вольтамперная характеристика цепи возбуждения. . ![]() . Процесс возбуждения будет происходить по ступенчатой кривой до точки . Напряжение
. Процесс возбуждения будет происходить по ступенчатой кривой до точки . Напряжение ![]() . Чем больше динамическая составляющая , тем быстрее идет процесс возбуждения. Если увеличить сопротивление , то машина возбудится до меньшего напряжения (точка ).
. Чем больше динамическая составляющая , тем быстрее идет процесс возбуждения. Если увеличить сопротивление , то машина возбудится до меньшего напряжения (точка ).
При дальнейшем увеличении вольтамперная характеристика будет касательной.
Сопротивление цепи возбуждения соответствующего касательной характеристике и есть критическое сопротивление. Начиная от этого сопротивления и дальше, машина не возбудится.
Характеристики генератора
Характеристика холостого хода имеет одностороннее возбуждение и имеет следующий вид.
2. Нагрузочная и регулировочная характеристики аналогичны генератору независимого возбуждения.
 Обычно эту характеристику сравнивают с характеристикой генератора независимого возбуждения. Причины, которые уменьшают напряжение генератора параллельного возбуждения: 1. Падение напряжения в якорной цепи - .
Обычно эту характеристику сравнивают с характеристикой генератора независимого возбуждения. Причины, которые уменьшают напряжение генератора параллельного возбуждения: 1. Падение напряжения в якорной цепи - .
2. размагничивающее действие реакции якоря.
 3. с увеличением тока якоря уменьшается напряжение на зажимах якоря, а следовательно уменьшается ток возбуждения и поток т. е. , .
3. с увеличением тока якоря уменьшается напряжение на зажимах якоря, а следовательно уменьшается ток возбуждения и поток т. е. , .
Режим короткого замыкания у генератора очень опасен, ток короткого замыкания достигает .
9.Генератор смешанного и последовательного возбуждения
Генератор последовательного возбуждения
 Обмотка возбуждения у генератора включена последовательно с якорем. Ток возбуждения равен току якоря - .
Обмотка возбуждения у генератора включена последовательно с якорем. Ток возбуждения равен току якоря - .
При независимом возбуждении можно снять характеристику холостого хода. В обычной схеме, (рис. 34) можно снять только восходящую внешнюю характеристику. Генератор последовательного возбуждения не нашел практического применения.
Генератор смешанного возбуждения
 Генератор смешанного возбуждения широко используется в промышленности. Обмотки возбуждения по потоку могут быть включены согласно, либо встречно, рис. 35.
Генератор смешанного возбуждения широко используется в промышленности. Обмотки возбуждения по потоку могут быть включены согласно, либо встречно, рис. 35.
1. Характеристика холостого хода , , .
При холостом ходе ток якоря равен нулю, поэтому обмотка возбуждения не создает потока. Следовательно, характеристика холостого хода аналогична генератору параллельного возбуждения.
 2. Нагрузочная характеристика ,
2. Нагрузочная характеристика ,
Нагрузочная характеристика (3) для генератора параллельного возбуждения.
Нагрузочная характеристика (2) для генератора смешанного возбуждения при согласном направлении токов. Поэтому, последовательная обмотка играет роль компенсатора реакции якоря и характеристика (2) проходит выше характеристики холостого хода.
3. Внешняя характеристика , , .
 У генератора смешанного возбуждения при различном соотношении и направлении потоков можно получить характеристики различного вида.
У генератора смешанного возбуждения при различном соотношении и направлении потоков можно получить характеристики различного вида.
Если потребители находятся вдали от генератора, то обмотку возбуждения по току выполняют значительной, что дает повышенное напряжение с учетом падения напряжения в сети (характеристика 1). Для нормального режима используется характеристика 2.
 Характеристика 3 – экскаваторная характеристика, которая получена при встречном включении обмоток.
Характеристика 3 – экскаваторная характеристика, которая получена при встречном включении обмоток.
4. Регулировочная характеристика , .
Регулировочные характеристики практически можно снять, соответственно внешним характеристикам 1 и 2.
Якоря ![]() . Электромагнитный момент
. Электромагнитный момент ![]() .
.
10. Пуск двигателей постоянного тока
 Двигатели постоянного тока широко используются в различных системах электропривода, где требуется широкий диапазон регулирования частоты вращения. Двигатель постоянного тока преобразовывает потребляемую электрическую энергию в механическую на валу, хотя машина постоянного тока обратима. Покажем принцип перевода генератора в режим двигателя, рис. 36.
Двигатели постоянного тока широко используются в различных системах электропривода, где требуется широкий диапазон регулирования частоты вращения. Двигатель постоянного тока преобразовывает потребляемую электрическую энергию в механическую на валу, хотя машина постоянного тока обратима. Покажем принцип перевода генератора в режим двигателя, рис. 36.
Для генератора , откуда ток генератора ![]() .
.
С увеличением сопротивления ток уменьшается, следовательно, уменьшится и ток . При дальнейшем увеличении будет равна напряжению U
И ток генератора будет равен нулю. Далее с увеличением ток уменьшится, а, следовательно, уменьшится и . При этом и ток из сети сменит направление, а машина перейдет в двигательный режим. Уравнение равновесного состояния для двигателя: , , , тогда ![]() .
.
Получено уравнение скоростной характеристики двигателя постоянного тока. Уравнение моментов для двигателя записывается: .
Энергетическая диаграмма двигателя постоянного тока
Электрическая потребляемая мощность двигателем
Электромагнитная мощность
Механическая мощность
Потери в обмотке возбуждения
Общий ток из сети
![]() .
.
Разделив уравнение на ток , получим
Откуда
Пуск двигателей постоянного тока
 Уравнение равновесного состояния двигателя , откуда ток равен: .
Уравнение равновесного состояния двигателя , откуда ток равен: .
 При пуске двигателя ,следовательно и пусковой ток может быть больше номинального в раз. Это может привести к круговому огню на коллекторе и механической поломке двигателя. Поэтому, для ограничения пускового тока до используют пусковые реостаты, либо пусковые станции и ток при этом равен .
При пуске двигателя ,следовательно и пусковой ток может быть больше номинального в раз. Это может привести к круговому огню на коллекторе и механической поломке двигателя. Поэтому, для ограничения пускового тока до используют пусковые реостаты, либо пусковые станции и ток при этом равен .
По мере разгона якоря в нем наводится, и ток якоря уменьшается. Поэтому, после разгона якоря пусковые сопротивления в цепи якоря выводятся. Схема контактного пуска представлена на рис. 38.
 Временная диаграмма пуска двигателя представлена на рис. 39.
Временная диаграмма пуска двигателя представлена на рис. 39.
Пуск по пусковым характеристикам представлен на рис. 40.
Для пуска двигателей небольшой мощности используют пусковые реостаты. Схема пускового реостата представлена на рис. 41.
При пуске движок реостата находится в положении (1), после пуска в положении (2).
Реверсирование двигателя постоянного тока
Электромагнитный момент
 Если изменить направление тока в якоре, то сила действующая на проводник с током изменит направление, а, следовательно, изменится и направление вращения рис. 42. К такому же результату приведет изменение полюсов (изменение направления тока обмотки возбуждения). Таким образом, для реверсирования необходимо либо изменить направление тока в якоре, либо изменить направление тока в обмотке возбуждения (изменить полюса). Если на входе двигателя изменить + на - , то поток и ток якоря изменят направление, а момент останется тем же как и направление вращения.
Если изменить направление тока в якоре, то сила действующая на проводник с током изменит направление, а, следовательно, изменится и направление вращения рис. 42. К такому же результату приведет изменение полюсов (изменение направления тока обмотки возбуждения). Таким образом, для реверсирования необходимо либо изменить направление тока в якоре, либо изменить направление тока в обмотке возбуждения (изменить полюса). Если на входе двигателя изменить + на - , то поток и ток якоря изменят направление, а момент останется тем же как и направление вращения.
11. Двигатели параллельного возбуждения
Двигатели постоянного тока классифицируются в зависимости от способа соединения обмотки возбуждения с якорем:
1. Двигатели параллельного возбуждения
Принципиальная схема включения двигателя параллельного возбуждения представлена на рис. 43. Для пуска используется пусковой реостат (п. р.). Свойства двигателя определяются его характеристиками.
1.Скоростная характеристика, зависимость , ,
 Скоростная характеристика при называется естественной, рис. 44. Если , то характеристика называется реостатной. Так как сопротивление якоря , как правило мало, то с увеличением тока якоря падение напряжения в якорной цепи мало и скорость уменьшается незначительно. Поэтому, естественная характеристика двигателя получается жесткой.
Скоростная характеристика при называется естественной, рис. 44. Если , то характеристика называется реостатной. Так как сопротивление якоря , как правило мало, то с увеличением тока якоря падение напряжения в якорной цепи мало и скорость уменьшается незначительно. Поэтому, естественная характеристика двигателя получается жесткой.
2.Моментная характеристика, зависимость , . На рис. 44. Представлена моментная характеристика, где
3.Механическая характеристика, зависимость скорости от момента, .
![]() , определим ток якоря через момент, , откуда , это выражение подставим в исходное уравнение, получим механическую характеристику:
, определим ток якоря через момент, , откуда , это выражение подставим в исходное уравнение, получим механическую характеристику: ![]() , .
, .
 Механические характеристики при разных сопротивлениях представлены на рис. 45, где , т. е. механическая характеристика при также жесткая. Это определяет область использования этих двигателей (трансмиссии, вентиляторы, системы ГД для привода станков).
Механические характеристики при разных сопротивлениях представлены на рис. 45, где , т. е. механическая характеристика при также жесткая. Это определяет область использования этих двигателей (трансмиссии, вентиляторы, системы ГД для привода станков).
Условия устойчивой работы агрегата
 Основное уравнение движения электропривода
Основное уравнение движения электропривода
![]() .
.
Установившийся процесс, когда , , ,
Если , , .
Если , , .
 условием устойчивой работы агрегата является: , точка будет соответствовать устойчивой работе агрегата.
условием устойчивой работы агрегата является: , точка будет соответствовать устойчивой работе агрегата.
4. Рабочие характеристики, это зависимость .
Обмотка возбуждения двигателя включена последовательно с якорем, рис. 45а. Ток якоря равен току возбуждения. Поэтому обмотка возбуждения имеет большое сечение и малое число витков. Последовательное соединение обмотки возбуждения является отличительной особенностью этого двигателя и влияет на вид характеристик. С увеличением тока якоря, увеличивается поток, скорость двигателя резко падает, т. е. получается мягкая скоростная характеристика, рис. 46. 1.Скоростная характеристика , . В общем виде, за счет насыщения, не имеет решение, аналитическое выражение скоростной характеристики можно получить только для ненасыщенной машины, когда , рис. 46.
1.Скоростная характеристика , . В общем виде, за счет насыщения, не имеет решение, аналитическое выражение скоростной характеристики можно получить только для ненасыщенной машины, когда , рис. 46.
 Момент , при , , т. е. если ток нагрузки возрастает в 2 раза, то момент в 4 раза. Это условие и определяет область применения этих двигателей, т. е. используются там, где при пуске нужен большой пусковой момент (тяговый привод). Скоростная характеристика при , запишется:
Момент , при , , т. е. если ток нагрузки возрастает в 2 раза, то момент в 4 раза. Это условие и определяет область применения этих двигателей, т. е. используются там, где при пуске нужен большой пусковой момент (тяговый привод). Скоростная характеристика при , запишется: ![]() .
.
2. Моментная характеристика, , , при , , рис. 46.
3. Механическая характеристика, . Аналитическое выражение характеристики может быть записано при условии .
![]() , , , если подставить ток в исходное уравнение, получим:
, , , если подставить ток в исходное уравнение, получим: ![]() ,
, ![]() , где .
, где .
Общий вид механических характеристик представлен на рис. 47.
Двигатель последовательного возбуждения пойдет на разнос при работе его в холостую. Это может привести к механическим поломкам двигателя. Поэтому, минимальный ток двигателя должен быть не менее .
13. Двигатель смешанного возбуждения
Принципиальная схема включения двигателя представлена на рис. 48. В зависимости от того, какая из обмоток преобладает по потоку, двигатели подразделяются на две разновидности:
1)Двигатель параллельного возбуждения с добавочной, последовательной обмоткой. Характеристики такого двигателя приближаются к двигателю параллельного возбуждения, рис. 49. Характеристика (1), естественная. Характеристика (2) соответствует встречному включению потоков , при согласном включении, получаем характеристику (3).
 2)Двигатель последовательного возбуждения с добавочной параллельной обмоткой. Характеристики такого двигателя приближаются к характеристикам двигателя последовательного возбуждения. Характеристика 4 - характеристика двигателя последовательного возбуждения, характеристика 5 - характеристика двигателя смешанного возбуждения, при этом, обмотки включаются только согласно. Такая характеристика имеет скорость идеального холостого хода и двигатель не пойдет в разнос при холостом ходе. У такого двигателя частота вращения и момент зависят от двух потоков. , откуда
2)Двигатель последовательного возбуждения с добавочной параллельной обмоткой. Характеристики такого двигателя приближаются к характеристикам двигателя последовательного возбуждения. Характеристика 4 - характеристика двигателя последовательного возбуждения, характеристика 5 - характеристика двигателя смешанного возбуждения, при этом, обмотки включаются только согласно. Такая характеристика имеет скорость идеального холостого хода и двигатель не пойдет в разнос при холостом ходе. У такого двигателя частота вращения и момент зависят от двух потоков. , откуда
А) Система генератор-двигатель (Г-Д).
Б) Тиристорный преобразователь-двигатель (ТП-Д).
В) Широтно-импульсное регулирование.
А) Система Г-Д, рис.54.
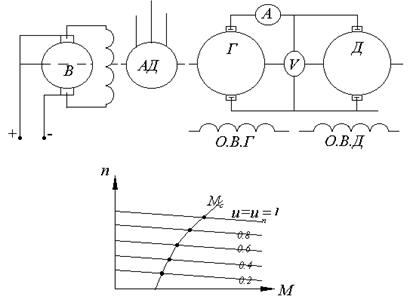
Увеличивая ток возбуждения генератора i вг, возрастает поток Ф г и Е г, а следовательно увеличивается напряжение на якоре двигателя и скорость возрастает. Регулирование происходит плавно при малых потерях энергии.
Эта система используется при большой мощности двигателя (подъёмники, прокатные станы, экскаваторы и т.д).
Б) Тиристорный преобразователь-двигатель.
В системе Г-Д используется большое число машин, что увеличивает стоимость установки и снижает надежность.
Идея регулирования напряжения подводимого к двигателю заключается в том, что, изменяя длительность подключения двигателя ключом (К) к сети, изменяется среднее значение напряжения, рис. 56. В качестве ключа используются схемы на базе тиристоров или транзисторов.
Изменяя время импульса t и изменяется скважность ,
где t 4 - время импульса;
t п - время паузы.
Среднее значение U ср =U 0 e.
![]() .
.
Как видим, изменяя среднее значение напряжения, можно регулировать частоту вращения двигателя. Эта система широко используется вместо контактакторно-резисторных систем.
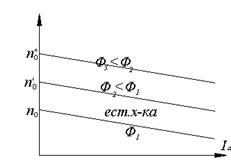
При уменьшении потока частота вращения возрастает, рис 53.
Как правило, регулирование частоты вращения изменением потока производят в сторону увеличения. В сторону уменьшения регулирование мало эффективно из-за насыщения магнитной цепи.
16.Коммутация двигателя. Прямолинейная коммутация
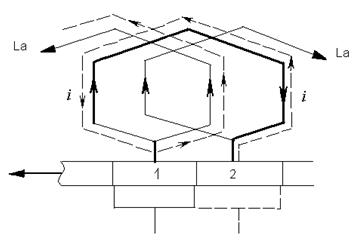
При вращении якоря щетка попеременно замыкает секции якоря и в этой секции происходит изменение направления тока. А сама секция передается в другую параллельную ветвь, рис.57. Ток в секции меняется только под щеткой. Дадим определение коммутации:
Коммутацией называется процесс изменения направления тока в секции при переходе ее из одной параллельной ветви в другую.
|
|
 |
При коммутации под щетками происходит очень сложный процесс, этот процесс протекает быстро (10 -2 ¸10 -5 сек.) и на него влияет много факторов. Мы будем исходить из классической теории коммутации. Разберем коммутацию в узком смысле, возьмем одну секцию и ширину щетки равную ширине коллекторной пластины.
На рис. 58 еще раз показан процесс коммутации. При положении щетки на пластине (1) ток в секции протекает по часовой стрелке, и секция относится к правой параллельной ветви. Затем при вращении якоря секция щеткой будет закорочена. В конце коммутации щетка будет расположена на пластине (2). Ток в секции сменит направление, и она перейдет в левую параллельную ветвь (показано пунктиром).
Процесс коммутации длится всего тысячные доли секунды. Такое быстрое изменение направления тока вызывает многие неприятности, в частности, искрение на коллекторе.
Искрение гостируется в специальной таблице:
Степень искрения: 1 - отсутствие искрения.
1 - слабое точечное искрение под небольшой частью щетки.
1 - слабое точечное искрение под большей частью щетки.
2 – искрение под всем краем щетки.
3 – значительное искрение под всем краем щетки с наличием крупных искр.
При нормальной коммутации степень искрения не должна превышать 1
Искрение определяется не только неудовлетворительной коммутацией, а также определяется механическими причинами, потенциальными неравномерностями. Механическое искрение определяется некачественной щеткой, при плохой обработке и
При изучении коммутации будем исходить из двух положений:
2. Удельное сопротивление контакта (переходное сопротивление единицы площади), будем принимать постоянным и не зависимым от плотности тока.
Закон изменения тока в коммутируемой секции
Время, в течение которого происходит смена направления тока в коммутируемой секции, называется периодом коммутации - Т к.
![]() ,
,
где к - число коллекторных пластин,
n - частота вращения якоря,
В ш - ширина щетки,
В к - коллекторное дел
Электромеханические свойства электропривода без обратных связей в основном определяются характеристиками двигателя.
Наиболее широкое применение нашли двигатели с независимым (параллельным) возбуждением, которые и рассматриваются в пособии.
^ Номинальный момент двигателя постоянного тока (ДПТ) M н, возникающий в результате взаимодействия номинального магнитного потока Ф н с номинальным током якоря I н
где с = p 0 N /2a – конструктивная постоянная двигателя при числе пар полюсов p 0 , числе активных проводников якоря N , числе параллельных ветвей якоря a .
Для якорной цепи двигателя справедливо уравнение номинального напряжения U н, записанное по второму закону Кирхгофа
 , (48)
, (48)
где ^ R я – сопротивление всей якорной цепи, состоящей из обмоток якоря (r я) и добавочного сопротивления R п, E 0 – ЭДС обмотки якоря.
Сопротивление обмотки якоря r я для двигателей средней и большой мощности (P н) оценивается по формуле
 , (49)
, (49)
где R н = U н /I н – .
Основные свойства двигателя постоянного тока оцениваются его скоростной (механической) характеристикой.
^ Скоростная характеристика – это зависимость скорости от тока якоря ω = f (I ) при U = const.
 . (50)
. (50)
Естественной скоростной характеристикой называют зависимость ω = f(I ) при номинальных значениях напряжения и потока и при отсутствии дополнительных сопротивлений цепи якоря
 (51)
(51)
Из уравнения естественной характеристики (при ^ I н) получают величину, которая носит название машинная постоянная ДПТ c Ф н
 , (52)
, (52)
номинальное значение скорости двигателя
 , (53)
, (53)
относительное номинальное падение скорости Δν н
 . (54)
. (54)
^ Механическая характеристика – это зависимость скорости от момента ω = f(M ) при U = const и потоке возбуждения Ф= const
 . (55)
. (55)
Коэффициент крутизны β является основным параметром, определяющим вид механической характеристики
 , (56)
, (56)
где γ – коэффициент жесткости механической характеристики. Механические характеристики при β=0 абсолютно жесткие; при β≤0,1 – жесткие; при β>0,1 – мягкие.
^ Жесткость механической характеристики ДПТ γ * , Н. с
 (57)
(57)
применяется при расчетах привода с ДПТ.
Из уравнения (50) следует, что регулировать скорость, можно, изменяя сопротивление якоря ^ R я, магнитный поток Ф, напряжение U .
1. Искусственная реостатная характеристика 2 при введении сопротивления в цепь якоря показана на рис.6 (ниже естественной характеристики 1). Реостатное регулирование неэкономично и используется только при пуске.
2. Регулирование изменением магнитного потока возможно только при ослаблении магнитного потока из-за насыщения магнитной системы и ограничено механической прочностью ДПТ при высоких скоростях (характеристика 3 на рис.6).
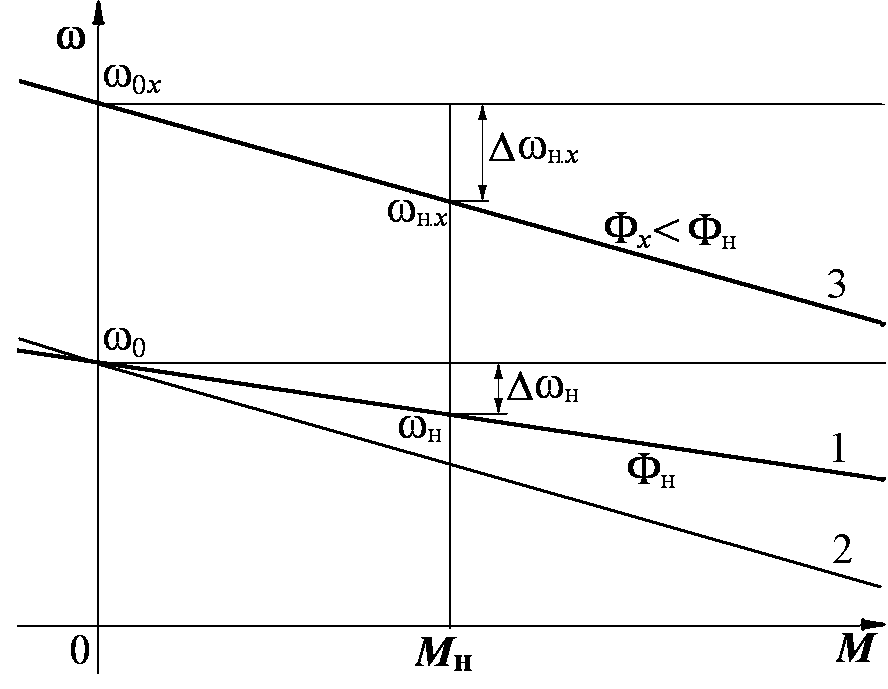
Рис.6. Естественная (1) и искусственные (2, 3) механические характеристики
Скорость идеального холостого хода обратно пропорциональна коэффициенту ослабления магнитного потока α ф
 (58)
(58)
^ Относительное номинальное падение скорости Δν н. x при номинальной нагрузке M н и ослабленном магнитном потоке α ф Ф н
 . (59)
. (59)
3. Для регулирования напряжения двигателя используется генератор (система Г-Д) или статический преобразователь (ТП-Д). Система ТП-Д обеспечивает широкий диапазон регулирования ω.
^ Переходный процесс – это процесс перехода привода из одного установившегося режима работы в другое установившееся состояние. Это происходит при пуске, изменении нагрузки на валу двигателя, торможении, реверсе и т.п.
^ Режим динамического торможения (ДТ) осуществляется отключением двигателя от сети и включением в цепь якоря сопротивления (двигатель работает как автономный генератор).
^ Режим торможения противовключением (ПВ) реализуется путем изменения на ходу полярности напряжения якоря или обмотки возбуждения ДПТ (ПВ первого рода).
Режим рекуперативного генераторного торможения возможен, если скорость превысит скорость холостого хода (ω> ω 0).
Переходные процессы зависят от характера объекта. Если система нелинейная, проводится компьютерное моделирование . В случае линейной электромеханической системы, состоящей из ДПТ с линейной механической характеристикой и жесткого механического звена возможен анализ процессов аналитическими методами.
Совместное решение уравнений движения электропривода (29) и механической характеристики (55) дает уравнение переходных процессов системы «двигатель с линейной механической характеристикой – жесткое механическое звено», определяемых механической инерционностью электропривода
 , (60)
, (60)
где уст = 0 –(M с r я /(cФ н) 2) – установившееся значение скорости электропривода после окончания переходного процесса (M = M с).
Решением (60) является переходная характеристика
где T м = J Σ r я /(cФ н) 2 – электромеханическая постоянная времени, ω нач – начальная скорость.
При нулевых начальных условиях
. (62)
Пример 8. Определить ЭДС генератора, питающего цепь якоря двигателя по схеме генератор _ двигатель (Г-Д) рис.7, для получения требуемой скорости двигателя при заданной нагрузке.
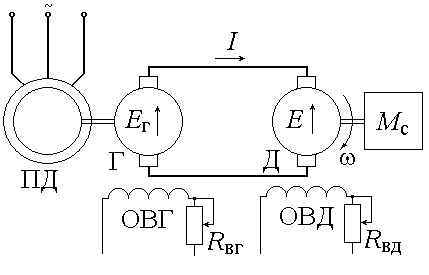
Рис.7. Электропривод по системе генератор-двигатель
P нг = 8,8 кВт; U нг = 220 В; I н = 40 А; r яг = 0,5 Ом; двигатель: P нд = 8,0 кВт; ω н = 90 рад/с; U нд = U нг = U н = 220 В; I н = 40 А; r яд = 0,5 Ом.
Схема и характеристики привода Г-Д приведены на рис.7, 8.
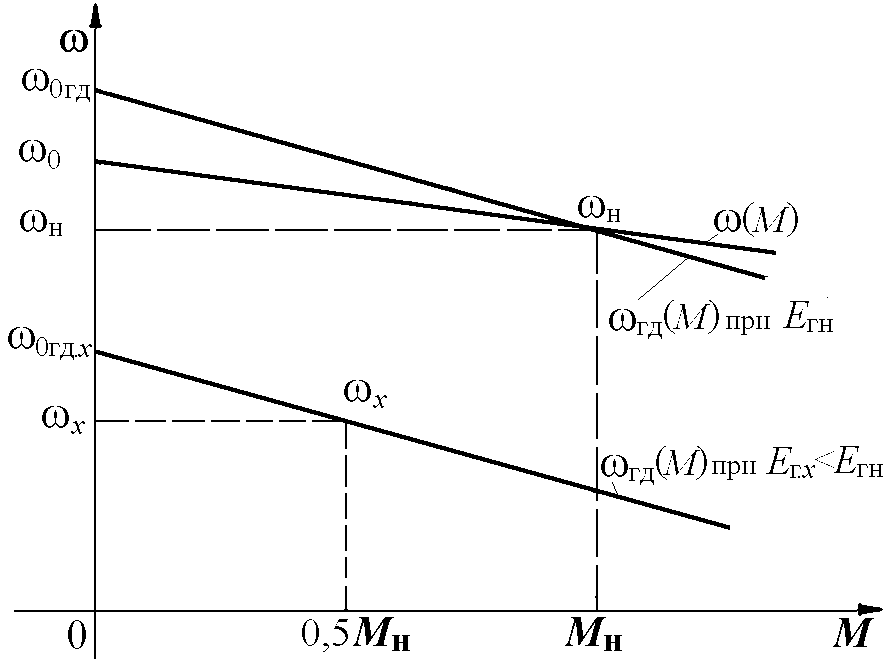
Рис.8. Механические характеристики электропривода Г-Д
1. Определить машинную постоянную двигателя c Ф н и скорость холостого хода двигателя ω 0гд в системе Г-Д.
2. Найти номинальное значение ЭДС генератора E гн для получения номинальной скорости двигателя ω гд = ω н = 90 рад/с.
3. Найти ЭДС генератора E г. x для получения скорости привода в системе Г–Д ω x = 0,5ω н при M с. x = 0,5M н.
Решение . Машинная постоянная двигателя c Ф н при r я = r яд
c Ф н = (U нд – r яд I н)/ ω н = 2,22 Вб. (63)
Падение скорости в системе Г-Д при номинальной нагрузке
 = 18 рад/с, (64)
= 18 рад/с, (64)
где r яд, r яг – сопротивления цепи якоря двигателя и генератора (рис.7).
Скорость холостого хода системы Г-Д при E гн (рис.8)
 = 108 рад/с. (65)
= 108 рад/с. (65)
ЭДС генератора E гн для получения в системе Г-Д номинальной скорости
 = 240 В. (66)
= 240 В. (66)
ЭДС генератора для получения скорости привода ω x = 0,5ω н при M с. x = 0,5M н.
Пример 9. Определить ослабление магнитного потока двигателя при регулировании скорости по системе Г-Д для получения повышенной скорости привода при уменьшении нагрузки.
Данные машин системы Г-Д: генератор: U нг = 220 В; I н = 40 А; r яг = 0,05 Ом; двигатель: ω н = 90 рад/с; U нд = 220 В; I н = 40 А; r яд = 0,05 Ом, характеристики даны на рис.6.
1. Найти машинную постоянную, номинальное сопротивление двигателя и абсолютное и относительное сопротивление цепи якорей системы Г-Д c Ф н; R н; .
2. Найти уменьшение относительного магнитного потока двигателя x . для относительной скорости привода x = 1,4 при относительной нагрузке x = 0,5.
Решение . Для вычисления уменьшения относительного магнитного потока двигателя x . для заданной скорости и нагрузки привода используется система относительных параметров
 ,
,  ,
,  ,
,  ,
,  = 0,02, (68)
= 0,02, (68)
где ![]() = 0,1 Ом;
= 0,1 Ом;  = 5 Ом;
= 5 Ом;  .
.
Уравнение механической характеристики имеет вид (55).
В относительных единицах уравнение механической характеристики при 
 , (69)
, (69)
откуда уменьшение магнитного потока двигателя, учитывая решение, имеющее физический смысл ( ;
; )
)
 = 0,71. (70)
= 0,71. (70)
Пример 10. Для привода с двигателем постоянного тока независимого возбуждения (ДПТНВ) с реостатно-релейным управлением (рис.9) рассчитать величины ступеней пусковых сопротивлений. Номинальные значения параметров двигателя: P н = 8,5 кВт; U н = 220 В; I н = 44 А; ω н = 94 рад/с. Максимальный пиковый момент двигателя при пуске 1 =2. Относительные значения момента переключения ступеней пускового сопротивления 2 = 1, статического момента нагрузки с = 0,8.
1. Определить скорость идеального холостого хода двигателя ω 0 и построить в долевых величинах естественную механическую характеристику двигателя = f().
2. Найти число ступеней пуска m и построить характеристики реостатного пуска (рис.10).
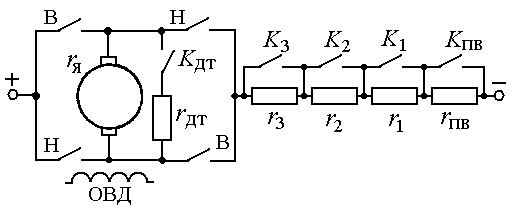
Рис.9. Схема электропривода с реостатно-релейным управлением
3. Определить номинальное сопротивление двигателя R н = U н /I н, сопротивление якоря r я, найти значения ступеней r 1 , r 2 ,…, r m и полное сопротивление пускового реостата r полн.
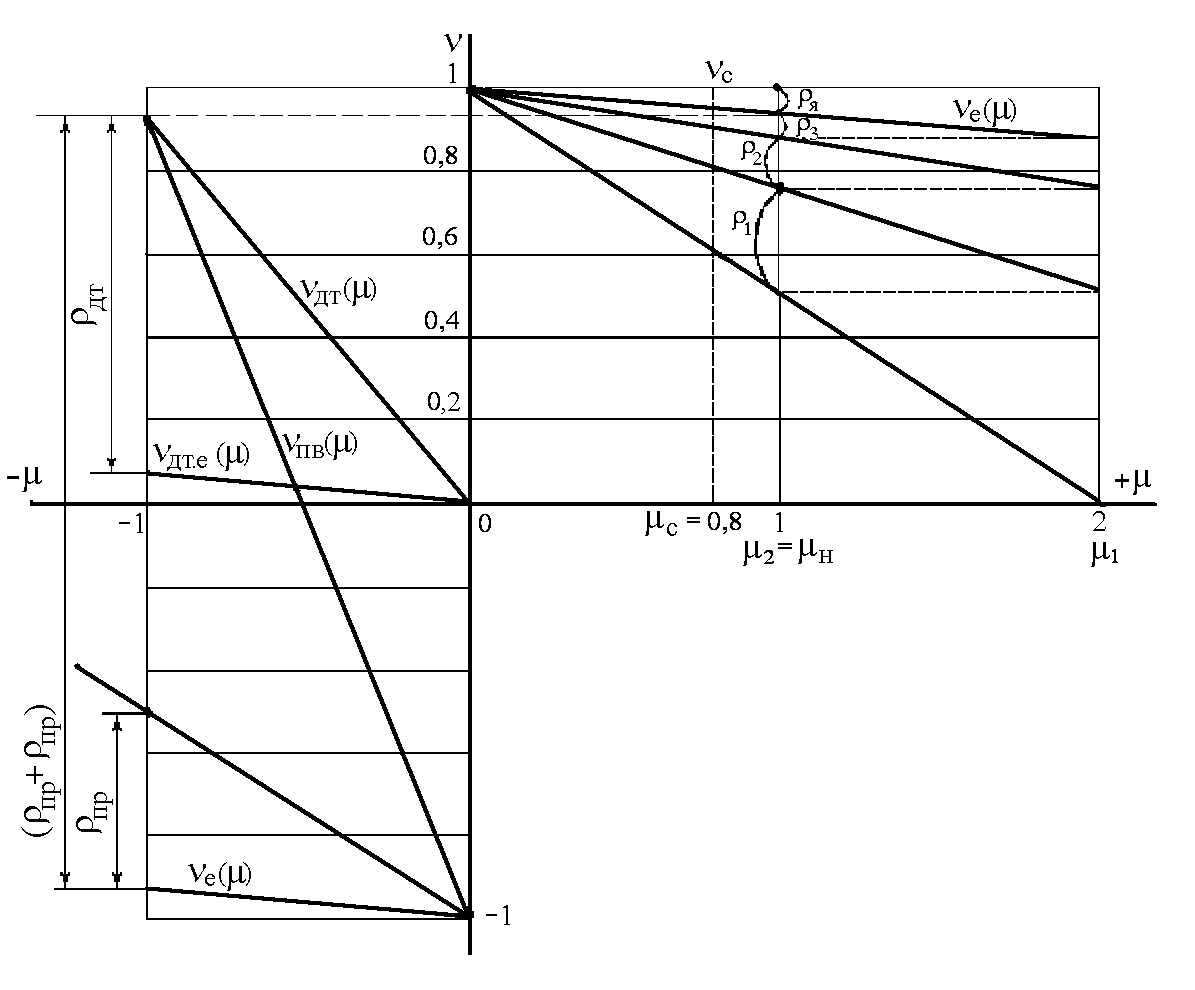
Рис.10. Механические пусковые и тормозные характеристики ДПТНВ
Решение . Для расчета величин ступеней пусковых сопротивлений (форсированный пуск) определяют следующие параметры (рис.9).
Номинальное сопротивление двигателя R н
R н = U н /I н =5 Ом. (71)
Сопротивление якоря двигателя r я
 = 0,3 Ом. (72)
= 0,3 Ом. (72)
Скорость холостого хода
 = 100 рад/с. (73)
= 100 рад/с. (73)
Машинная постоянная двигателя c Ф н определяется по (52).
c Ф н = (U н – r я I н)/ ω н = 2,2 Вб.
Приближенно число ступеней реостата m
при заданном значении  = 0,06 находят, исходя из отношения пиковых моментов к моментам переключения
= 0,06 находят, исходя из отношения пиковых моментов к моментам переключения
 = 2,02. (74)
= 2,02. (74)
При числе ступеней m
= 3 отношение моментов λ ≈ 2. Следовательно, корректировку 1 , 2 , (при соблюдении условий 
 ) можно не проводить, приняв λ = 2, m
= 3.
) можно не проводить, приняв λ = 2, m
= 3.
Сопротивления ступеней реостата по принятой величине λ
 ,
,  ,
,  ,…,
,…,  . (75)
. (75)
Сопротивления ступеней реостата при m = 3
 = 0,3;
= 0,3;  = 0,61; = 1,22 (Ом). (76)
= 0,61; = 1,22 (Ом). (76)
Относительные сопротивления ступеней  (см. рис.10).
(см. рис.10).
Полное сопротивление реостата при m = 3
 = 2,13 Ом. (77)
= 2,13 Ом. (77)
Сопротивление якорной цепи
 = 2,44 Ом. (78)
= 2,44 Ом. (78)
Пример 11. Для привода постоянного тока с реостатно-релейным управлением (см. рис.9) рассчитать ступень сопротивления для торможения противовключением и для динамического торможения. Характеристики приведены на рис.10. Номинальные значения параметров двигателя: Р н = 8,5 кВт; U н = 220 В; I н = 44 А; r я = 0,3 Ом; ω 0 = 100 рад/с; ω н = 94 рад/с. Двигатель переключается в тормозной режим противовключения или динамического торможения при с = 1 и = н. Максимальный тормозной момент при переключении т = 1. Пусковые характеристики рассчитаны для максимального значения момента при пуске с 1 = 2.
R н, рассчитать относительное сопротивление цепи якоря ρ=ρ я и определить полное (без разбивки на ступени) сопротивление пуска ρ полн.
2. Построить механические характеристики двигателя =f(μ) в долевых величинах при переключении в режим торможения противовключением или режим динамического торможения.
3. Определить величины добавочных сопротивлений ступени противовключения и динамического торможения ρ пв и ρ дт.
Расчет . Для привода постоянного тока с реостатно-релейным управлением при расчете величин ступеней сопротивлений торможения (см. рис.9) определяются следующие параметры.
Номинальное сопротивление двигателя R н по формуле (71).
Относительное сопротивление цепи якоря
 . (79)
. (79)
Полное сопротивление полн.
 =
= . (80)
. (80)
Величина добавочного сопротивления (см. рис. 10) ступени динамического торможения r дт и ρ дт = r дт /R н
 , (81)
, (81)
где ^ U нач – напряжение двигателя в начальный момент торможения (U нач ≈ U н); I доп – максимально допустимый ток (I доп ≈ I н, µ max = –1).
Величина добавочного сопротивления ступени торможения противовключением r пв и ρ пв = r пв /R н
 . (82)
. (82)
Пример 12. Определить, какой характер будут иметь переходные процессы при пуске двигателя постоянного тока независимого возбуждения вхолостую с приложением через 2,66 с номинального момента нагрузки (рис.11). Пуск производится подачей номинального напряжения на якорь двигателя с включенной обмоткой возбуждения. Для ограничения пускового тока в цепь якоря двигателя на время пуска введено добавочное сопротивление, ограничивающее максимальное значение тока при пуска I п = 2,5I н. Данные двигателя: мощность Р н =6,5 кВт, номинальная скорость вращения ω н = 104,5 рад/с, номинальное напряжение U н = 220 В; номинальный ток якоря I н =33,5 А; сопротивление цепи якоря r я = 0,77 Ом; индуктивность якоря L я = 0,01 Гн; момент инерции привода J Σ = 1,0 кгм 2 .
1.Найти электромеханические постоянные времени T м.п, T м в пусковом режиме и при приложении номинальной нагрузки.
2. Построить характеристики переходного процесса, считая, что процесс устанавливается за время t = 3,5T м.
Расчет . Расчет переходных процессов пуска привода постоянного тока вхолостую и приложения номинального момента нагрузки (см. рис.11) начинается с определения номинального момента двигателя
 . (83)
. (83)
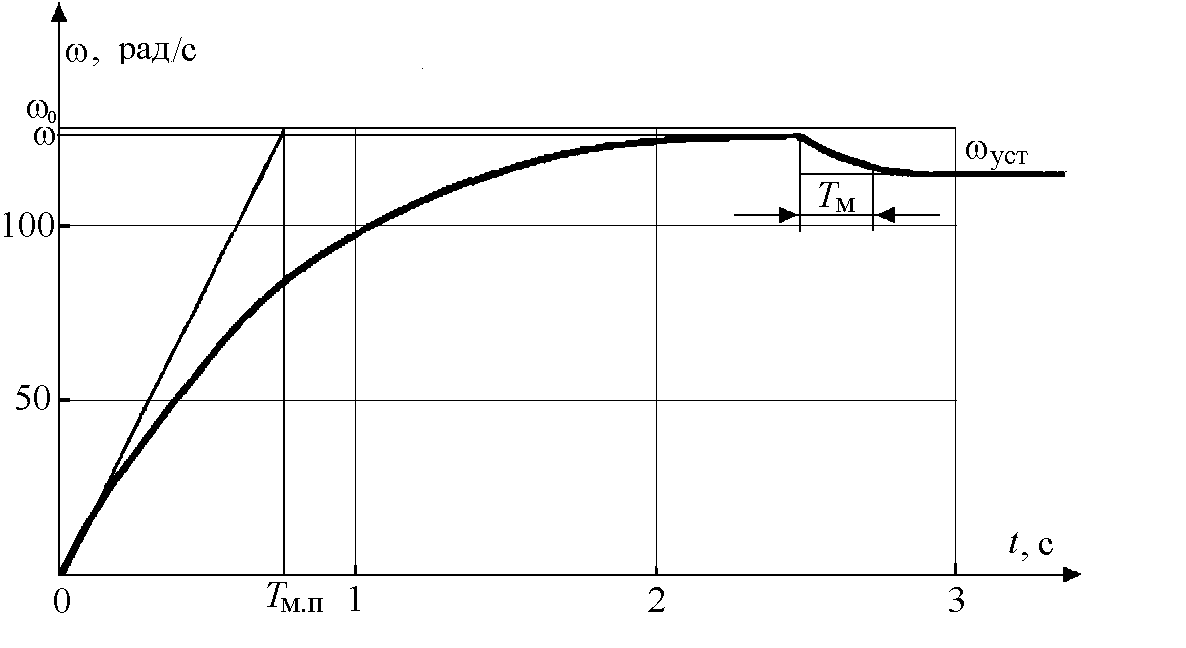
Рис.11. Характеристики при пуске и приложении нагрузки
Машинная постоянная двигателя из моментной характеристики
 . (84)
. (84)
Скорость холостого хода ω 0 определяется уравнением (52).
Добавочное сопротивление, вводимое в цепь якоря, равно
 . (85)
. (85)
. (92)
После разгона на холостом ходу при установлении ^ R п =0, к валу двигателя приложен момент нагрузки M с = М н (см. рис.10). Установившееся значение скорости после приложения нагрузки
 . (93)
. (93)
Для построения переходного процесса изменения скорости, обусловленного приложением нагрузки, с учетом (89) используется уравнение (60) при начальных условиях нач = 0
Задача 6.
Определить параметры двигателя постоянного тока по паспортным данным двигателя. Данные двигателя: мощность ^
Р
н = 40 кВт, скорость ω н = 100 рад/с, момент M
н = 400 Нм; напряжение U
н = 220 В; ток I
н = 200 А. Возбуждение двигателя независимое или параллельное. (Естественная характеристика 1 и искусственная характеристика 3 при ослабленном потоке Ф
1. Определить номинальное сопротивление двигателя R
н =
U
н /I
н, относительное и омическое сопротивления цепи якоря двигателя ρ,
r
я.
2. Найти машинную постоянную двигателя постоянного тока (ДПТ) c Ф н и скорость идеального холостого ω 0н.
3. Определить относительное падение скорости двигателя при номинальной нагрузке Δν н = Δω н /ω н (см. рис.6).
4. Найти относительное номинальное падение скорости Δν н. x при номинальной нагрузке M н и магнитном потоке α ф Ф н = 0,5 Ф н.
Задача 7. Определить номинальные значения скорости и момента двигателя постоянного тока, если известны его напряжение, ток, скорость холостого хода и сопротивление цепи якоря. Данные двигателя: U н = 220 В; I н = 200 А; ω 0 = 109 рад/с; r я = 0,05 Ом.
Найти: I) машинную постоянную двигателя c Ф н; 2) номинальную скорость вращения двигателя ω н; 3) номинальный электромагнитный момент двигателя M н.
Построить естественную и искусственную механические характеристики двигателя постоянного тока с параллельным возбуждением, если добавочное сопротивление в цепи якоря R д = 1,0 Ом.
Номинальные данные двигателя: Р н = 19 кВт;U н = 220 В;I н = 103 А;n н = 770 об/мин;
R я = 0,177 Ом.
Решение. Исходя из соотношения
или
для любых точек характеристики, имеем:
 .
.
Тогда частота вращения холостого хода двигателя
Номинальный вращающий момент, развиваемый двигателем
Искусственные электромеханические и механические характеристики рассчитываются и строятся по 2-м точкам с координатами
1. М = 0;n =n 0 ; 2.М =М н;n =n н.
Частота вращения двигателя при номинальном значении тока и введении в цепь якоря добавочного сопротивления R д = 1,0 Ом
Характеристики изображены на графиках рис. 1.
Р н = 65 кВт;U н = 440 В;I н = 168 А;n н = 1480 об/мин.
Какое добавочное сопротивление необходимо включить в цепь якоря двигателя, чтобы он работал в точке с координатами ω 1 = 94,5 с -1 ;М 1 = 0,5М н?
Номинальное сопротивление двигателя:
 .
.
Коэффициент полезного действия двигателя при номинальной нагрузке:
 .
.
Сопротивление якоря двигателя
Частота вращения двигателя идеального холостого хода
Номинальный вращающий момент двигателя
Естественная механическая характеристика строится по 2-м точкам с координатами
Получили точку М =М н;n =n н;М 1 = 0,5М н = 0,5·448 = 224 Н·м
1. М = 0;n =n 0 = 1574 об/мин; 2.М =М н = 448 Н·м;n =n н = 1480 об/мин.
Для нашего случая
ω 1 = 94,5 с -1 ,n 1 = 902,48 об/мин.
Принимая во внимание, что механическая характеристика линейная, считаем, что при
М =М н частота вращения на искусственной характеристике примет значение
n 2 =n 0 – (n 0 – n 1)·2 = 1574 – (1574 – 902,48)·2 = 231 об/мин.
Отсюда следует, что добавочное сопротивление R д можно найти по формуле
Подъемное устройство имеет кинематическую схему (рис. 1) и следующие данные: n н = 980 об/мин;J 1 = 0,5 кг·м 2 ;J 2 = 2 кг·м 2 ;J 3 = 25 кг·м 2 ;j 1 =j 2 = 4;D = 0,7 м; кпд каждой пары шестерен η = 0,95. Определить момент инерции для случая разгона и замедления при подъеме груза в 1 т.
Решение. Чтобы определить приведенный момент инерции, надо знать скорость подъема груза, соответствующую заданной скорости двигателя. Эту скорость, пренебрегая толщиной каната, можно считать равной окружной скорости барабана.

Угловая скорость двигателя

При разгоне
При торможении
Номинальные данные двигателя постоянного тока с параллельным возбуждением:
U н = 220 В;I н = 680 А; ω н = 47 с -1 ; I вн = 5 А;R я = 0,0163 Ом.
Определить 1) I ян; 2)М н; 3) ω, если к якорю двигателя приложено напряжение
U н = 170 В при номинальной нагрузке на валу и номинальном магнитном потоке
Номинальный ток якоря
Скорость вращения двигателя идеального холостого хода
Конструктивный коэффициент
Номинальный момент на валу двигателя
Скорость двигателя при U н = 170 В, номинальной нагрузке на валу и номинальном магнитном потоке
Номинальные данные двигателя постоянного тока с параллельным возбуждением:
P н = 13 кВт;U н = 110 В; I вн = 5,2 А; η = 91 %;R я = 0,025 Ом. Определить 1) ΔP ян; ΔP вн.
Номинальный ток двигателя
Номинальный ток якоря
Потери в обмотке якоря
Сопротивление обмотки возбуждения
Потери в обмотке якоря
U н = 220 В; I н = 275 А;n н = 665 об/мин.R я = 0,04 Ом. Определить добавочные сопротивления, которые необходимо включить в цепь якоря, чтобы двигатель работал приI =I н:
в двигательном режиме со скоростью ω = 30 с -1 ;
в режиме динамического торможения со скоростью ω = 30 с -1 ;
в режиме противовключения со скоростью ω = – 30 с -1 ;
Во всех случаях М с имеет реактивный характер.
Паспортные данные двигателя постоянного тока независимого возбуждения:
P н= 42 кВт;U н = 220 В; I н = 220 А;n н = 995 об/мин.R я = 0,07 Ом.
Определить:
І п ;
М п (пусковой ток и момент, если сопротивление пускового реостата 0,4R н ).
Ответы:
960 Н·м;
107 с -1 ;
450 Н·м;
U н = 110 В; I н = 608 А;I вн =8 А; n н = 980 об/мин.R я = 0,0122 Ом. Данную машину используют в режиме ГПТ, вращая ее со скоростьюп 1 = 1470 об/мин. определить выходное напряжениеu Г при номинальной нагрузке. Считать ток возбуждения независимым от режима работы машины.
Ответы: 147 В
Паспортные данные двигателя постоянного тока параллельного возбуждения:
U н = 110 В; I н = 10 А;R я = 0,6 Ом;R в =100 Ом. Определить:
I ян ; 2) Е н ; Р эн ;
Р 1н.
Ответы:
0,93 кВт;
1.1 кВт.
Пример 10.
P н=6 кВт;U н = 220 В; I н = 32,6 А;n н = 1000 об/мин; 2а=2; 2Р п =4; W я =372; I вн =1,05 А.
Определить:
Ответы:
0,008 Вб;
5,13 Н·м;
0,59 Ом;
210 Ом;
6,18 Н·м·с;
711 А и 8,72.
Пример 11.
Паспортные данные двигателя постоянного тока параллельного возбуждения типа П92:
P н=42 кВт; U н = 220 В; I н = 219 А;n н = 1000 об/мин; J Д =7,0 кг·м 2 ; I ВН =3,25 А; L В =13,87 Гн. Определить:
R д в режиме противовключения, если ω нач =0,5 ω 0 ; М НАЧ =2М Н;
Пусковой ток при прямом пуске двигателя и его кратность по отношению к номинальному.
Ответы:
0,118 с;
0,205 с;
0,69 Ом;
3385 А и 15,5.
Пример 12.
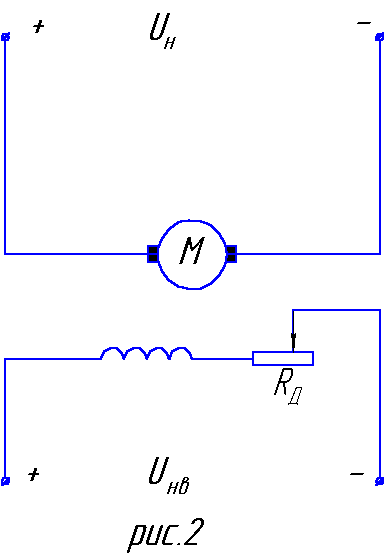
Двигатель постоянного тока независимого возбуждения работал в установившемся режиме при М с =const. Движок ползункового реостата (рис.2) переместили влево. Как изменятся новые установившиеся значения координат электропривода:
Ответы:
уменьшится;
увеличится;
не изменится;
уменьшится;
не изменится.
Пример 13.
Паспортные данные двигателя постоянного тока параллельного возбуждения:
U н = 220 В; I н = 303 А; I ВН =3,77 А;n н = 980 об/мин; R я =0,0404. Данную машину используют в режиме генератора. С какой скоростью необходимо вращать якорь машины, чтобы получить выходное напряжение 230 В при номинальной нагрузке? Ток возбуждения считать независимым от режима работы машины.
Ответы: 119,4 с -1 .
Пример 14.
Паспортные данные двигателя постоянного тока независимого возбуждения типа П81:
P н=32 кВт; U н = 220 В; I н = 170 А;n н = 1500 об/мин; Ф н =0,0124 Вб; J=2,8 кг·м 2 ; I ВН =1,64 А; С Е =105,24 Гн. Определить:
0 , если двигатель работает при Ф 1 =0,7·Ф н;
с, если двигатель работает с Ф 1 =0,7·Ф н, М=М н;
β (при ослабленном потоке, см. выше);
β Е (на естественной характеристике);
Т м (на естественной характеристике);
Т м (при ослабленном потоке, см. выше);
R д в цепи ОВД для обеспечения режима работы с ослабленным полем (см. выше), считая Ф≡I В.
Ответы:
241 с -1 ;
217 с -1 ;
9 Н·м·с;
18,7 Н·м·с;
0,15 с;
0,312 с;
57,7 Ом.
Пример 15.
Определить добавочное сопротивление в цепи якоря двигателя постоянного тока независимого возбуждения, если он работает в точке А характеристики (рис. 3). Сопротивление R я =0,1 Ом. Какие режимы работы в т. А, В, С, Д?
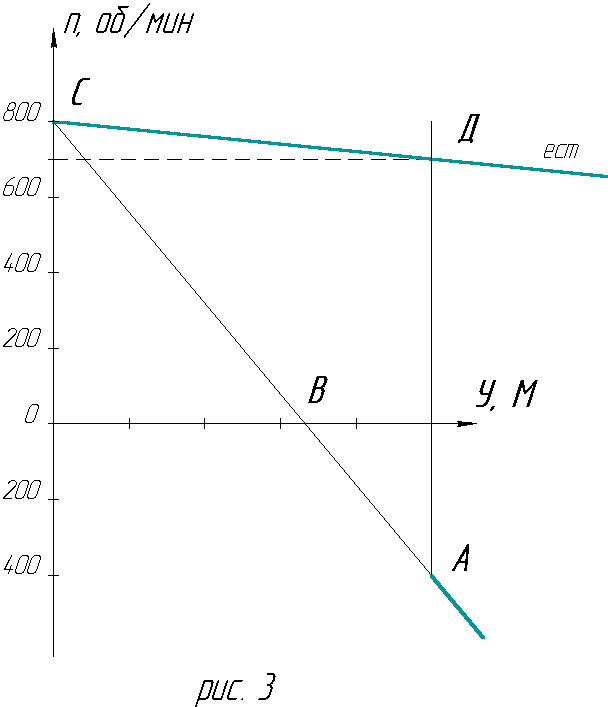
Ответы:
1,1 Ом; А - противовключение, В – короткое замыкание, С-идеальный х.х.; Д- двигательный установившийся.
Пример 16.
Обмотка возбуждения двигателя постоянного тока параллельного возбуждения по ошибке оказалась включенной неправильно (рис.4). Как поведет себя двигатель после включения его в сеть при R д =9ּR я,I п =2,5ּI H , если нагрузка на валу:
М с =0,5ּМ н?
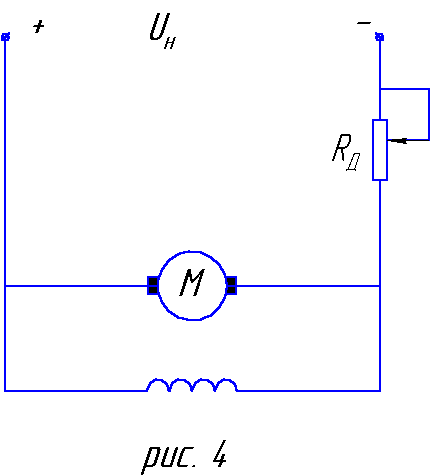
Ответы:
пойдет в ход; ω=ω 0 ;
не тронется с места.
Пример 17.
В каком соотношении находятся параметры двигателя постоянного тока независимого возбуждения:
U В, если он поочередно работал в точках 1,2,3,4 характеристик (рис. 5)?
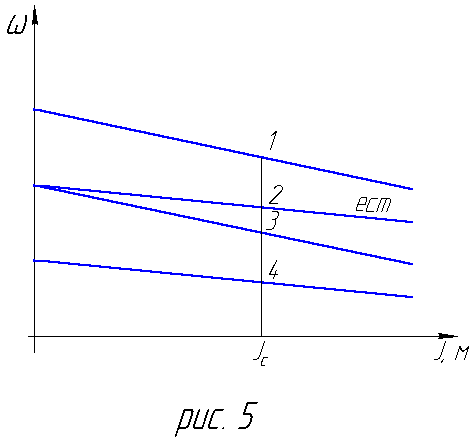
Ответы:
Е 1 =Е 2 >Е 3 >Е 4 ;
И 1 =И 2 >И 3 >И 4 ;
М 1 <М 2 =М 3 =М 4 ;
Ф 1 <Ф 2 =Ф 3 =Ф 4 ;
И В1 <И В2 =И В3 =И В4 .
Ответы: На внимание (проверка на знание)
Е 1 =Е 2 >Е 3 >Е 4 ;
U 1 = U 2 >U 3 > U 4 ;
М 1 <М 2 =М 3 =М 4 ;
Ф 1 <Ф 2 =Ф 3 < Ф 4 ;
U В1 U В2 U В3 U В4 .
Пример 18.
Паспортные данные двигателя постоянного тока параллельного возбуждения:
P н=15 кВт; U н = 220 В; I н = 81,5 А; ω н =168 с -1 ;R В =55 Ом. Кривая намагничивания машины приведена на рис.6. Какое добавочное сопротивления необходимо включить в цепь ОВД, чтобы получитьω 0 =304 с -1 ?
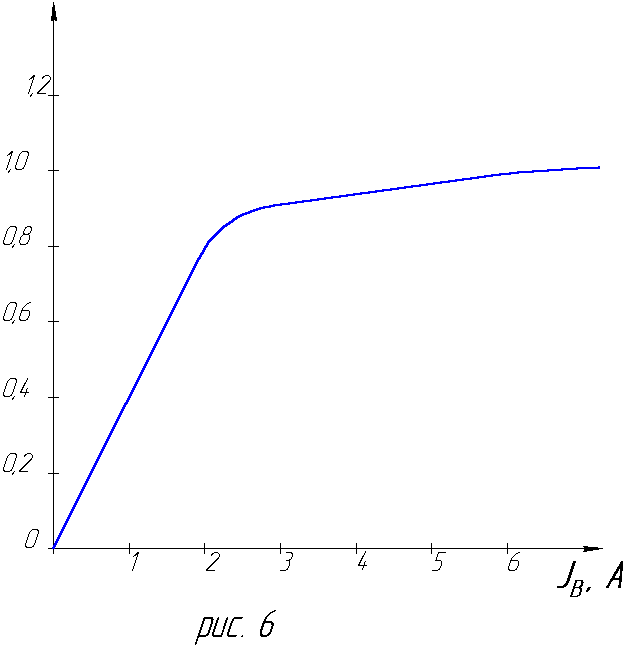
Ответ: 92 Ом.
Пример 19.
Паспортные данные двигателя постоянного тока независимого возбуждения:
P н = 65 кВт; U н = 440 В; I н = 168 А; ω н =155 с -1 . Определить величину добавочного сопротивленияR д в цепи якоря двигателя, если он работает в режиме рекуперативного торможения, имея координаты: ω = 235 с -1 ;М = 0,5·М н. Определить мощность на валу машины.
Ответы:
2,1 Ом;
53 кВт.
Пример 20.
Паспортные данные двигателя постоянного тока независимого возбуждения типа П61:
P н =11 кВт; U н = 220 В; I н = 60 А;I вн = 1,25 А;n н = 1500 об/мин. Определить:
Ответы:
177 Ом;
0,647 Н·м/А;
1,41 Н·м·с.
Пример 21.
Двигатель постоянного тока независимого возбуждения при работе на естественной характеристике имеет статическое падение Δn е =150 об/мин, а на искусственной (реостатной) характеристике – Δn и =600 об/мин при прежней нагрузке на валу. Определить величинуR д в цепи якоря, еслиR я =0,2 Ом.
Ответ: 0,6 Ом.
Пример 22.
Паспортные данные двигателя постоянного тока параллельного возбуждения:
U н = 220 В; I н = 154; η н = 0,85;n н = 740 об/мин;R я =0,112 Ом. Двигатель работал с различными магнитными потоками: Ф 1 = Ф н; Ф 2 = 0,8ּФ н; Ф 3 = 0,6ּФ н. Требуется определить при указанных значениях магнитных потоков:
скорости идеального холостого хода;
скорости вращения двигателя при номинальной нагрузке по току.
Ответы:
84 с -1 ; 105 с -1 ; 140 с -1 ;
77 с -1 ; 94 с -1 ; 122 с -1 ;
Пример 23.
Паспортные данные двигателя постоянного тока параллельного возбуждения:
Рн = 55 кВт; U н = 220 В; I н = 275 А;R ов = 47,8 Ом (приt= 15 ºС). КакоеR д необходимо включить в цепь якоря, чтобы получить кратность якорного пускового тока, равную 2,5 ?
Ответ: 0,28 Ом.
Пример 24.
Паспортные данные двигателя постоянного тока независимого возбуждения:
Рн = 65 кВт; U н = 440 В; I н = 168 А;n н = 1480 об/мин.
Определить:
сопротивление реостата, который необходимо включить в цепь якоря для обеспечения работы ЭП в режиме противовключения в точке с координатами: М = 0,5·М н; ω = 94,5 с -1 ;
мощность, подведенную к валу двигателя со стороны РМ;
мощность, потребляемую из сети. Статический момент имеет активный характер.
Ответы:
8,1 Ом;
21,3 кВт;
40 кВт;
Пример 25.
Двигатель постоянного тока параллельного возбуждения типа Д31 имеет технические данные:
2р п = 4; k s = 1,2; W В = 1700; Ф н = 8,8 мВб; I вн = 1,42 А; R я = 579 Ом; U н = 220 В; I н = 37 А; k Ф= 2,16 В∙с; Δφ/Δi в * = 0,64.
Требуется определить:
1) L В ; 2) k ;
3) R В ;
4)∆Р ВН (потери мощности в ОВД номинальные);
5) β, если в цепи якоря включено R д = 0,2· R Н .
Ответы:
155 Ом;
313 Вт;
2,64 Н·м·с.
32,4 Гн;
Пример 26.
Определить скорость вращения двигателя постоянного тока параллельного возбуждения при номинальной нагрузке на валу в двигательном и рекуперативном режимах работы, если известно, что: R д = 0,08 Ом;R я = 0,02 Ом; ω 0 = 90 с -1 ; ; ω н = 83,7 с -1 .
Ответы:
58,5 с -1 ;
121,5 с -1 .
Пример 27.
Двигатель постоянного тока параллельного возбуждения работает на естественной характеристике. Номинальное напряжение двигателя равно 220 В. По результатам эксперимента установлено, что:
при I = 60A; ω =103с -1 ;
при I =120A; ω =101с -1 ;
Определить:
скорость идеального холостого хода ω 0 ;
сопротивление якорной цепи R я;
ЭДС для первого случая Е 1;
ЭДС для второго случая Е 2 ;
Момент для первого случая М 1 ;
Момент для второго случая М 2.
Ответы:
126 Н·м;
105 с -1 ;
0,0667 Ом;
Пример 28.
Двигатель постоянного тока независимого возбуждения типа П51 имеет технические данные:
Р н = 6 кВт; U н = 220 В; I н = 33 А; n н = 1500 об/мин; J = 0,35 кг·м 2 .
Определить:
Т м ;
Номинальный момент на валу М нв;
Момент холостого хода М хх;
Добавочное сопротивление R д в цепи якоря для обеспечения работы ЭП в точке характеристики с координатами: ω = 0,7·ω н;М с = 0,5·М нв;
Ответы:
0,123 с;
38,2 Н·м;
4,3 Н·м;
4,2 Ом.
Пример 29.
Паспортные данные двигателя постоянного тока параллельного возбуждения типа Д22:
U н = 220 В; Р н = 4,8 кВт; η н = 0,839. Определить сопротивление пусковых ступеней и секций для осуществления реостатного пуска в две ступени при λ =М 1 /М 2 = 2.
Ответы:
2,72 Ом;
1,36 Ом;
1,36 Ом;
0,68 Ом.
Пример 30.
Двигатель постоянного тока параллельного
возбуждения типа Д41 имеет технические
данные:U
н =
220 В;I
н =
69,5
А;р
п =
2;
J
д =
0,8 кг·м 2 ;k
Ф
=
2,7 В·с;R
я =
0,235 Ом;I
вн =
2,2 А;
Ф н =
17 мВб;W
в =
1480;k
s
=
1,2; Δφ/Δi = 0,64.
Параметры механической части
привода:
= 0,64.
Параметры механической части
привода:
J м = 40 кг·м 2 ;i = 8.
Определить:
Электромеханическую постоянную времени Т м ;
Постоянную времени якорной цепи Т я ;
Постоянную времени цепи возбуждения Т в ;
Статическую скорость ω с в режиме динамического торможения, если тормозное сопротивлениеR т = 0,3·R н;М с =М н.М с имеет активный характер.
Ответы:
0,051 с;
0,049 с;
0,35 с;
–24,1 с -1 .
Пример 31.
Паспортные данные двигателя постоянного тока независимого возбуждения типа П51:
Р н = 3,2 кВт;U н = 220 В;I н = 18,3 А;k Ф = 1,88 В·с;Т м = 0,127 с.
Определить:
Момент инерции J ;
Начальный тормозной ток в режиме динамического торможения, если ω нач = ω н,R Т = 0;
Кратность начального тормозного тока;
Во сколько раз начальный тормозной ток превышает допустимое по условиям коммутации значение.
Ответы:
0,374 кг·м 2 ;
























