الفصل الخامس والعشرون عزم الدوران والخصائص الميكانيكية للآلة غير المتزامنة
§ 25-1. عزم الدوران الكهرومغناطيسي
التعبير عن عزم الدوران الكهرومغناطيسي. عزم الدوران الكهرومغناطيسي الذي تم تطويره بواسطة القوى الكهرومغناطيسية على الدوار آلة غير متزامنة، يتم تحديده بواسطة -*المساواة
أين R م ح- القدرة الميكانيكية على الدوار، والتي يحددها التعبير (2^-74)، د - السرعة الزاوية الميكانيكية لدوران الدوار.
السرعة الزاوية الميكانيكية لدوران المجال المغناطيسي للتوافقي الأساسي
وهكذا على أساس التساوي (25-4) و(25-5)

عند استخدام وحدات SI، لحظة مووفقا للصيغة (25-4) و (25-6) يتم التعبير عنها بالنيوتن متر. إذا كنت ترغب في الحصول على مبالكيلو جرام متر نقسم الناتج على 9.81 -
وفقا للتعبير (25-6)، فإن العزم الكهرومغناطيسي عند أي قيمة انزلاق معينة يتناسب مع مربع الجهد المطبق وكلما كان أصغر كلما كان أكبر ز زومفاعلات التسرب الاستقرائي للآلة. وفقا للصيغة (25-4)، لأي قيمة s ميتناسب أيضًا مع مربع التيار الثانوي.
استكشاف الإدمان م = و(قعد إكس جي إكس-مقدار ثابت.
وبحسب المساواة (25-6)، لـ s>0 أيضًا م> O (أوضاع المحرك والتشغيل الخلفي)^ a عند s< 0 тЗкже م<. يا (وضع المولد). وبالإضافة إلى ذلك، عندما s = O أيضا م =آه، ما الذي يمكن إثباته باستخدام الصيغة (25-6) من خلال الكشف عن عدم اليقين أو الإهمال بين قوسين معقوفين لهذه الصيغة لـ s -» 0 الكل
ز"الأعضاء، باستثناء س-^-^-. وقد تم بالفعل تحديد هذه النتائج
(انظر الفقرتين 24-4 و24-5) بناءً على الاعتبارات المادية. بالإضافة إلى ذلك، وفقًا لـ (25-6) عند s = +oo سيكون هناك م= 0. يتم تفسير هذا الأخير من خلال حقيقة أنه وفقًا للتعبير (24-18) عند s = su فإن التيار / 2 يكون تفاعليًا بحتًا وبالتالي لا يطور عزم الدوران.
منذ عند النقاط s = -oo، 0 و + oo اللحظة م= 0، ثم بين هذه النقاط يوجد الحد الأقصى (الحد الأقصى والأدنى) للحظة.
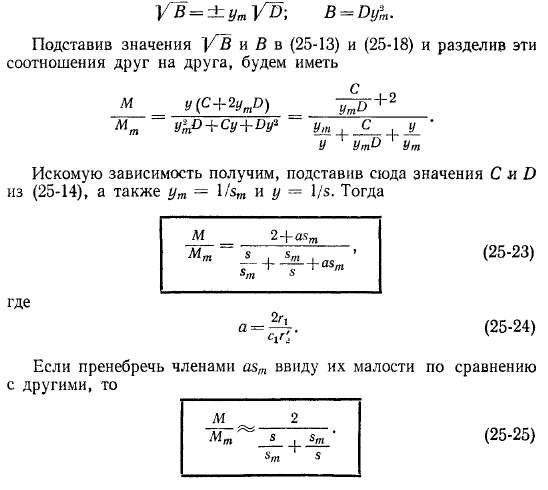
وبناء على ما سبق، المنحنى م - و(ق)في ش= const له النموذج الموضح في الشكل. 25-1. ويوضح نفس الشكل المنحنى 1"ح = و(ق)، تم إنشاؤها وفقا للعلاقة (25-5)، ومنحنى التيار الأولي 1 ز = و(س). يتم تقديم كل هذه المنحنيات بوحدات نسبية وتتوافق مع آلة غير متزامنة ذات طاقة ص ن= = 15 كيتفي ش ±= ش لاوشريطة أن تكون معلمات الآلة مستقلة عن مقادير التيارات والانزلاق. بدلاً من سيمكن أيضًا رسم سرعة دوران العضو الدوار على محور الإحداثي السيني ص= (1 - ق)ن ضد
من الشكل. يوضح الشكل 25-1 أن عزم الدوران الكهرومغناطيسي يصل إلى الحد الأقصى السلبي والإيجابي ± م رمع بعض الزلات س= ±s m والتي تسمى حرجة.
مع زيادة الانزلاق من s = 0 إلى س= ق ملحظة مينمو مع الزيادة س،ومع زيادة أخرى في الانزلاق، اللحظة ميتناقص رغم الزيادة ز ز.مثل هذا المسار من المنحنى م = و(s) يفسر بحقيقة أنه مع زيادة s، يصبح التيار /r أكثر وأكثر حثيًا بطبيعته. ولذلك فإن العنصر النشط 1" % , الذي يحدد القيمة م،مع زيادة s، فإنه يزيد أولاً بـ / £، ثم يبدأ في الانخفاض، على الرغم من الزيادة هو - هي.وينبغي أيضا أن يؤخذ في الاعتبار أنه مع زيادة
الشكل 25-1 عزم الدوران الكهرومغناطيسي والمنحنيات الحالية لآلة غير متزامنة
مع زيادة /j، يزداد انخفاض الجهد في الدائرة الأولية، وبالتالي e. د س. السابقويتم تقليل التدفق Ф، الذي يتم من خلاله إنشاء اللحظة، إلى حد ما.
تجدر الإشارة إلى أن الجزء الثابت في الآلة الكهربائية يخضع لنفس عزم الدوران مثل الجزء الدوار، ولكنه موجه في الاتجاه المعاكس.
يتم إدراك لحظة التأثير على الجزء الثابت من خلال الأجزاء والتجمعات التي تربط الآلة بالأساس.
اللحظة الكهرومغناطيسية نتيجة تفاعل الموجات المكانية للحث المغناطيسي والتيارات. في§ 22-4، تم تقديم التوزيع المكاني لتيار اللف على طول محيط عضو الإنتاج كمجموع لموجات التيار المكاني الجيبية ذات التوافقيات المختلفة.
ويمكن اعتبار حدوث قوى وعزم كهرومغناطيسية في الآلة الكهربائية نتيجة لتفاعل هذه الموجات الحالية معالموجات الجيبية للتوزيع التعريفي المجال المغناطيسي على طول محيط عضو الإنتاج. عزم الدوران غير الصفر

يتم إنشاؤه من خلال تفاعل التوافقيات المكانية للمجال الحالي والمغناطيسي من نفس الترتيب، والتوافقيات ذات الترتيبات المختلفة تخلق قوى كهرومغناطيسية متناوبة ومكونات عزم الدوران على طول محيط عضو الإنتاج، وقيمتها الإجمالية صفر.
في التين. 25-2, أيُظهر منحنى الحث للتوافقي الأساسي للمجال المغناطيسي الناتج في فجوة آلة غير متزامنة

أرز. 25-2. تشكيل عزم الدوران نتيجة لتفاعل الموجات المكانية للحث المغناطيسي والتيار


وبتعويض قيم هذه الكميات في (25-10) نحصل على التعبير لـ مفي شكل آخر:
بناءً على التعبير (25-11)، يتناسب عزم الدوران مع تدفق الآلة والمكون النشط للتيار /^ أو /2، وهو ما يتوافق تمامًا مع المفاهيم الفيزيائية الأساسية للقوى الكهرومغناطيسية ويتوافق مع فوق.
ووفقا للعبارتين (24-6) و(24-18)،
وبتعويض هذه الكميات في (25-11) نحصل على العلاقة (25-4). ويترتب على ذلك أن التعبيرين (25-4) و (25-11) متساويان تمامًا.
الحد الأقصى لعزم الدوران الكهرومغناطيسي.التعبير عن اللحظة الكهرومغناطيسية (25-6) يكون صحيحًا في الحالة العامة، أي أيضًا عندما تكون المعلمات ز ب × a1، ز "٪، س" a2ليست ثابتة وتعتمد على حجم التيارات والانزلاق. في هذه الحالة، لكل قيمة s، من الضروري استبدال القيم المقابلة للمعلمات المحددة في التعبير (25-6). دعونا نقتصر هنا على النظر في آلة ذات معلمات ثابتة وفحص الاعتماد م = و (ق)وفقا للصيغة (25-6) في ش س = const و/ 2 = const للحد الأقصى والحد الأدنى.
بدلاً من s، من الأفضل النظر في الكمية المتغيرة


بأخذ المشتقة من (25-13) بالنسبة إلى فيوبمساواة ذلك بالصفر نحصل على معادلة لتحديد القيم في= ش ر,الذي مله أقصى:
في هذه العلاقات، تشير علامات الزائد إلى الوضع الحركي، وعلامات الطرح إلى وضع تشغيل المولد.
بالنسبة للأجهزة العادية غير المتزامنة، شروط مع ز سأما في العبارات (25-17) و(25-19) فهي قليلة مقارنة بغيرها. الاعتقاد لذلك ز س= 0، لدينا


العلاقات التي تم الحصول عليها تسمح لنا أن نستنتج أن قيمة العزم الأقصى، أولا، لا تعتمد حسب التعبيرين (25-19) و (25-21)، على قيمة المقاومة النشطة للدائرة الثانوية، ثانيا، إنه يتناسب مع مربع الجهد ، وثالثًا ، وبدقة كبيرة يتناسب عكسيًا مع مقاومة التسرب الاستقرائي ، ورابعًا ، في وضع المولد يكون أكبر قليلاً منه في وضع المحرك. لأن و ز^ DF، ثم من التعبير (25-21) يمكننا أيضًا أن نستنتج أن الحد الأقصى لعزم الدوران يتناسب مع مربع التدفق المغناطيسي للآلة. من المهم جدًا التأكيد على أنه على الرغم من اللحظة م رلا يعتمد على المقاومة النشطة الثانوية، فإن مقدار الانزلاق s m الذي يتم ملاحظة هذه اللحظة فيه، حسب التعبيرين (25-17) و (25-20)، يتناسب مع هذه المقاومة.
ش المحركات غير المتزامنةالنسخة العادية مضاعفة من الحد الأقصى لعزم الدوران عند الجهد المقنن
و ق م= 0.06 -f- 0.15. أعلى كملديها محركات مع عدد قليل من الأعمدة.
دعونا نطبق العلاقة (25-4) لوضع التشغيل الاسمي (المؤشر "n") وللوضع ذو عزم الدوران الأقصى (المؤشر ت).
عادةً ما تكون هذه النسبة للمحركات غير المتزامنة في حدود 2.5-3.5.

وكمثال توضيحي لما هو موضح في الشكل. 25-3 يوضح المنحنيات م= / (s) لقيم rjj المختلفة في وضع المحرك لنفس الجهاز غير المتزامن بقوة 15 كيت,كما في الشكل. 25-1. لاحظ أن القيمة ز\يتضمن كلاً من المقاومة النشطة للملف الثانوي نفسه ومقاومة المقاومة المتغيرة، والتي يمكن تضمينها في الدائرة الثانوية لآلة ذات دوار ملفوف. المنحنى / في الشكل. 25-3 يتوافق مع القيمة العادية ز! زاللف الثانوي، والمنحنيات المتبقية - لزيادة القيم ز\أو حالة إدراج مقاومة متغيرة في الدائرة الثانوية.
مقدار اللحظة الكهرومغناطيسية بالنسبة إلى الحد الأقصى لهاالقيمة القصوى.بالنسبة لنسبة هذه اللحظات لآلة ذات معلمات ثابتة، يمكن الحصول على تعبير بسيط مناسب لبعض الحسابات العملية.
ومن المعادلة (25-16) نجد
في ق م - 0.15 ساعة - 0.30 خطأ في التحديد M1M روبحسب الصيغة التقريبية (25-25) تبلغ حوالي 10-17٪.
تم اشتقاق الصيغة (25-25) لأول مرة بواسطة M. Kloss. حق معتسمى هذه الصيغ (25-23) و (25-25) بصيغ كلوس.
الصيغة (25-25) تسمح لك بتحديد م رو ق مورسم المنحنى م - و(ق)لمحرك ذي معلمات ثابتة، إذا كان معروفًا موs لأي وضعين للتشغيل، على سبيل المثال، الاسمي (UI N، s H) والبدء (مش،ق ح = 1). منحنى أكثر دقة م = و (ق)يمكن تكوينها باستخدام المعادلة (25-23)، إذا كانت قيمة a معروفة أيضًا باستخدام الصيغة (25-24). تقريبًا يمكننا أن نأخذ = 2.
بداية عزم الدوران الكهرومغناطيسيم صيتوافق مع قيمة العزم الكهرومغناطيسي في اللحظة الأولى لبدء تشغيل المحرك، أي عند s = 1. وبحسب التعبير (25-6)،
I يتناسب عزم الدوران المبدئي لقيم معينة لمعلمات الماكينة أيضًا مع مربع الجهد المطبق.
من التعبير (25-26) والشكل. 25-3 يتبع ذلك مع الزيادة ت\لحظة م صينمو حتى ق م= 1 لن م ع = م ر.علاوة على ذلك، وعلى أساس المساواة (25-17)،
مع مزيد من الزيادة ز"2لحظة م صسوف تنخفض مرة أخرى. وفي الوقت نفسه، القيمة الحالية البداية
E-* 2JS-1 = ^2P
مع زيادة ز" 2،وبحسب التعبير (25-5) فإنه يتناقص باستمرار. يزيد م أ،على الرغم من النقصان في /^ مع الزيادة ز"%إلى القيمة التي تحددها المساواة (25-27)، يتم تفسيرها من خلال حقيقة أنه في هذه الحالة زاوية التحول r|) 2 بين النقصان الحالي ز*وه. د.س. 2 جنيه استرليني.
§ 25-2. الخصائص الميكانيكية للمحرك غير المتزامن والمتطلبات التشغيلية له
صافي عزم الدورانعلى رمح المحرك م 2عزم دوران كهرومغناطيسي أقل مبالمبلغ

الخصائص الميكانيكيةيمثل المحرك الاعتماد على سرعة الدوران صمن عزم الدوران المطور على العمود م زفي ش س= ثابت و و س= ثابت:
منذ تحت التحميل لحظة شهرصغيرة مقارنة ب موM 2، ثم يمكننا أن نضع شهر« 0 أو تمكين شهرفي حجم عزم دوران الكبح الثابت M st، والذي تم تطويره بواسطة آلة العمل أو الآلية التي يتم تشغيلها للدوران بواسطة محرك غير متزامن. لذلك، أدناه، كخاصية ميكانيكية للمحرك، سننظر في العلاقة بين ص(أو ق) واللحظة الكهرومغناطيسية م:
يظهر في الشكل. منحنيات عزم الدوران 25-1 و25-3 متحت الظروف المحددة وتمثل الخصائص الميكانيكية للمحرك غير المتزامن مع المعلمات الثابتة.
من الواضح أن نوع الخصائص الميكانيكية يعتمد بشكل كبير على قيمة المقاومة النشطة الثانوية.
عملية بدء التشغيل ووضع التشغيل الثابت للحالة غير المتزامنةمحرك.لنفكر في عملية بدء تشغيل محرك غير متزامن بملف ثانوي قصير الدائرة عند تشغيله بجهد الشبكة الكامل. هذه هي الطريقة التي تبدأ بها الغالبية العظمى من المحركات غير المتزامنة العاملة. عند النظر في عملية بدء التشغيل، لن نأخذ في الاعتبار العمليات الكهرومغناطيسية العابرة المرتبطة بها معحيث أنه عند تشغيل أي دائرة كهربائية لآلية كهرومغناطيسية تحت الجهد وعندما يتغير وضع التشغيل الخاص بها، فإن التيارات لا تصل إلى قيم الحالة المستقرة عمليا على الفور، ولكن بعد مرور بعض الوقت، تتناسب قيمتها مع ثابت الزمن الكهرومغناطيسي تي،اعتمادا على الحث والمقاومة النشطة للدائرة. عادة، عند بدء تشغيل محرك غير متزامن، يكون الوقت المستغرق للتشغيل إلى السرعة العادية أطول بكثير من مدة العمليات الكهرومغناطيسية العابرة، وبالتالي فإن تأثير هذه العمليات على عملية البدء يكون صغيرًا. وبالتالي، يمكن اعتبار عملية البدء على أساس التبعيات التي تم الحصول عليها أعلاه لعزم الدوران والتيارات في ظل ظروف تشغيل المحرك في حالة مستقرة مع انزلاق معين.
في التين. 25-4 يوضح الخاصية الميكانيكية م = و (ن)المحرك غير المتزامن والخصائص الميكانيكية M st = و (ن)
بعض آليات الإنتاج مدفوعة بمحرك.
معادلة لحظات وحدة "المحرك - آلية الإنتاج" لها الشكل
يمثل عزم الدوران الديناميكي للوحدة، بما يتناسب مع لحظة القصور الذاتي ج.إذا كان في ص= اه ازاي
في هذه الحالة، ID IN = 0، ^ = 0 وتحدث حالة مستقرة
تشغيل المحرك تحت الحمل بسرعة الدوران ف"والانزلاق س".ضخامة س"سيكون أكبر، كلما زاد UI ST وزاد حمل المحرك. إذا، أثناء تشغيل المحرك، يزداد الحمل (الثابت، لحظة آلية الإنتاج M st) (المنحنى 2 في التين. 25-4)، ثم سيزيد، و صسوف يتناقص. عندما ينخفض الحمل (منحنى 3 في التين. 25-4)، على العكس من ذلك، سوف ينقص، وسوف أزيد.


يحدث انتقال المحرك إلى حالة تشغيل ثابتة جديدة عندما يتغير الحمل فعليًا على النحو التالي. لو م ^سوف تزيد، ثم سيكون هناك م< М ст, М дин < 0, -£ < 0 и
ستبدأ حركة دوار المحرك في التباطؤ. في هذه الحالة، يزداد الانزلاق، وبالتالي يزداد e أيضًا. د.س. £ 2S والدائرة الحالية / 2 الثانوية. ونتيجة لذلك، لحظة الكهرومغناطيسية ميزيد وينقص ص(زيادة s) تحدث حتى يحدث تساوي اللحظات مرة أخرى م = م".عندما ينخفض الحمل، تستمر العملية في الاتجاه المعاكس.
كما يظهر في الشكل. 25-4، مع ارتفاع حاد في الجزء الأولي (الأيسر) من منحنى عزم الدوران م = و (ق)يتميز المحرك غير المتزامن بخاصية ميكانيكية صلبة، أي عندما يتغير الحمل، تتغير سرعة دوران المحرك قليلاً. يتم تصنيع جميع المحركات الحثية العادية بخصائص ميكانيكية صلبة ز" %و ق مصغيرة نسبيا. في هذه الحالة، s، وبالتالي، p el2 [انظر. المساواة (24-72)] أثناء التشغيل صغيرة أيضًا والمحرك ذو كفاءة عالية.
شروط التشغيل المستقر. فيالحالة العامة كما هو موضح في
أرز. 25-5 خصائص المحرك م = و (ن)وآلية الإنتاج م"= / (ف)قد يكون لها عدة نقاط تقاطع.
في النقاط / و 3
الكل
والعمل غير مستقر.
عند البدء من حالة الثبات، يصل المحرك إلى سرعة دوران ثابتة عند هذه النقطة ف""(الشكل 25-5) ومزيد من الزيادة صمستحيل، منذ على يسار هذه النقطة م"> م.إذا كان المحرك يعمل في الوضع؛ النقطة المقابلة 2 (الشكل 25-5)، ثم عند أدنى انتهاك للنظام والتغيير صالعلاقات بين مو م سان جسوف يتحول المحرك إلى العمل في وضع يتوافق مع إحدى النقاط المستقرة / أو 3. وضع التشغيل عند هذه النقطة 3 من الناحية العملية فهو غير مقبول لأنه يتميز بانخفاض سرعة الدوران وضعف الكفاءة ووجود تيارات كبيرة في اللفات مما يؤدي إلى توقف المحرك

يسخن بسرعة ويفشل. ولذلك فإن المنطقة الطبيعية المستقرة لتشغيل المحرك تعتبر هي قسم الخاصية الميكانيكية الموجود على يسار النقطة 4
(الشكل 25-4) عندما 0< s <
قدرة التحميل الزائد للمحرك غير المتزامن.عندما يعمل المحرك في قسم عادي مستقر من الخاصية الميكانيكية (على يسار النقاط 4 في التين. 25-4 و25-5) حملها، يحدده العزم الساكن م"آلية العمل أو الآلة، يمكن رفعها تدريجياً إلى القيمة M st = م ر(النقاط 4 في التين. 25-4 و25-5)، ويتم الحفاظ على التشغيل المستقر حتى هذه النقطة. مع زيادة أخرى في الحمل، عندما M st > > م تي،سوف يتباطأ المحرك بسرعة ويتوقف، أو بخصائص مشابهة للصورة. سوف يدخل 25-5 في عملية مستقرة عند سرعة دوران منخفضة. وفي كلتا الحالتين، إذا لم يتم إيقاف تشغيل المحرك، يحدث نظام تسخين خطير.
وبالتالي، من حيث المبدأ، يمكن تشغيل محرك غير متزامن عند 0< م < م ر.ومع ذلك، العمل على المدى الطويل منعم م رفيما يتعلق بالتدفئة أمر غير مقبول أيضًا.
بالإضافة إلى ذلك، عند تشغيل المحرك، من الضروري أن يكون لديك بعض احتياطي عزم الدوران، نظرًا لاحتمال حدوث أحمال زائدة عشوائية قصيرة المدى، بالإضافة إلى انخفاض قصير أو طويل المدى في جهد الشبكة.
لأن م رأنا" الخامس\،ثم عند التناقص أولتعلى سبيل المثال، عند 15%، فإن الحد الأقصى لعزم دوران المحرك سينخفض إلى 0.852 = 0.72 أو 72% من قيمته الأصلية.
حق معيجب أن يذكر دائما م ر> م أنا.
نسبة عزم الدوران الأقصى عند الجهد المقنن إلى الجهد المقنن
يحدد سعة التحميل الزائد للمحرك ويسمى الحد الأقصى لعزم الدوران. وفقًا لـ GOST 186-52 وGOST 9362-60، بالنسبة للمحركات ذات القوى وسرعات الدوران المختلفة، يلزم ما يلي: كم> 1.7 -ز-2.2. ينطبق الحد الأدنى على المحركات ذات سرعة الدوران ص== من 750 دورة في الدقيقة
تعدد عزم الدوران الأولي وتيار البدء.
في كثير من الأحيان، يمكن تشغيل المحركات التحريضية في وضع الخمول أو بحمل عمود خفيف وتحميلها بقدرة مقدرة أو بقدرة أخرى بمجرد الوصول إلى سرعة الدوران العادية. وفي حالات أخرى، تتمتع آليات وآلات العمل (على سبيل المثال، المراوح) بخاصية ميكانيكية M st =
= / (ف)من النوع الذي ص= 0 العزم الساكن M st صغير ويزداد تدريجياً مع الزيادة ص.هذا لا يتطلب من المحرك تطوير عزم دوران كبير. ومع ذلك، في بعض الأحيان تحتاج المحركات إلى التشغيل تحت حمل كبير (على سبيل المثال، الرافعات، والرافعات، والمطاحن المختلفة، وما إلى ذلك)، وفي هذه الحالات يجب أن تتمتع المحركات بعزم دوران مرتفع.
يمكن تشغيل المحركات غير المتزامنة ذات الدوار الملفوف باستخدام مقاومة متغيرة متصلة بالدائرة الثانوية للمحرك أثناء بدء التشغيل. على النحو التالي من § 25-1 (انظر الشكل 25-3)، في هذه الحالة يزداد عزم دوران المحرك وينخفض تيار البدء. ولذلك، فإن المعايير لا تنظم قيم عزم الدوران وتيارات المحركات غير المتزامنة مع الدوار ذو الطور. في الوقت نفسه، يجب أن تستوفي المحركات غير المتزامنة التسلسلية ذات القفص السنجابي التي تنتجها مصانع بناء الآلات الكهربائية مجموعة متنوعة من الشروط لبدء آليات الإنتاج ويجب أن تكون عزم الدوران الخاصة بها كبيرة بما فيه الكفاية.
وفقًا لـ GOST 186-52 وGOST 9362-60، يجب أن تحتوي المحركات غير المتزامنة ذات القفص السنجابي على مضاعف عزم الدوران الأولي عند البدء عند الجهد المقدر م"(س = 1، ص= 0)
لا يقل عن 0.7-1.8. تنطبق القيم الأقل على المحركات الأكبر حجمًا. بدء النسبة الحالية
بالنسبة للمحركات ذات الدوارات ذات القفص السنجابي ذات القوى المختلفة وسرعات الدوران المختلفة، يجب ألا تزيد عن 5.5-7.0.
مدى ملاءمة القفص السنجابي والمحركات الحثية ذات السرعة الثابتة كمحركات للأغراض العامة تعيينات.كما سبقت الإشارة، للحصول على كفاءة جيدة، يجب أن تعمل المحركات غير المتزامنة عند حمل مقدر مع انزلاق منخفض (s = 0.02 ■*■ 0.05) وبالتالي يكون لها خاصية ميكانيكية صلبة (س م= 0.06 ن - 0.15). هذا هو الشرط للمحركات معيتعارض الدوار ذو القفص السنجابي مع المعلمات الثابتة معالحاجة إلى عزم دوران كافٍ للمحرك. في الواقع، كما يتبين من المنحنى / الشكل. 25-3، عزم الدوران البداية في ظل هذه الظروف ليس كبيرا بما فيه الكفاية. ويمكن إثبات ذلك باستخدام العلاقة (25-25)، إذا قمت بإعادة كتابتها مرة واحدة
وضع البداية (ق = 1، م= M″)، مرة أخرى - للوضع الاسمي (س= ش، م= M n) وتقسيم النسب الناتجة على بعضها البعض. في هذه الحالة سيكون لدينا
وبالتالي، فإن المحركات ذات المعلمات الثابتة تنتج عزم دوران غير كافٍ. لذلك، يتم تصنيع المحركات القفصية السنجابية للأغراض العامة حصريًا كمحركات متغيرة. وفي الوقت نفسه، لزيادة ز"^خلال فترة البدء وبالتالي الزيادة م صيتم استخدام ظاهرة التأثير السطحي أو إزاحة التيار في ملف الدوار (انظر الفصل 27).
§ 25-3. اللحظات والقوى الكهرومغناطيسية الناتجة عن التوافقيات الأعلى للمجال المغناطيسي
أعلاه، نظرنا إلى عزم الدوران الكهرومغناطيسي الناتج عن التوافقي الأساسي للمجال. إلى جانب التوافقي الأساسي، هناك أيضًا توافقيات المجال الأعلى والأدنى الناتجة عن وجود توافقيات ns. اللفات وهيكل التروس للجزء الثابت والدوار. تخلق توافقيات المجال هذه أيضًا عزمًا يمكن تقسيمه إلى غير متزامن ومتزامن.
يتم إنشاء عزم الدوران بواسطة القوى الكهرومغناطيسية العرضية. بالإضافة إلى هذه القوى، تعمل أيضًا القوى الكهرومغناطيسية الشعاعية، والتي تسبب اهتزازًا وضجيجًا للآلة.
تتجلى اللحظات والقوى المشار إليها بقوة أكبر أثناء الانزلاقات القريبة من الوحدة، أي عند بدء تشغيل المحرك وفرملةه. والسبب في ذلك هو، أولاً، أنه عند s = 1 تكون التيارات كبيرة. ثانيًا: التوافقيات العليا للمجال تدور ببطء وتكون سرعة التواقت لدوران الدوار صغيرة بالنسبة لها، وتصل العزوم إلى قيم قصوى قريبة من سرعتها التواقتية.
دعونا نتناول بإيجاز الظواهر المذكورة.
لحظات غير متزامنة خذ بعين الاعتبار، على سبيل المثال، التوافقي السابع لحقل الجزء الثابت (l>). - 7), الذي يدور في نفس اتجاه الاتجاه الرئيسي
سرعة ش = -=- ص-ص.عندما يدور هذا التوافقي بالنسبة إلى الجزء المتحرك، يتم تحفيز e- في ملف الجزء المتحرك. د.س. ويتم إنشاء التيارات وعزم الدوران ملتوكذلك نتيجة لعمل التوافقي الأساسي للمجال. عند لحظة البداية عند s = 1، اللحظة م 7> 0 ويعمل وفقًا للعزم التوافقي الأساسي Mi (الشكل 26-6). عندما يبدأ الجزء المتحرك بالدوران في اتجاه دوران التوافقي الأساسي (s< 1), относительная скорость поля седьмой гармоники и ротора начнет уменьшаться. При скорости ротора n = nj7أو س= 6/7 التوافقي السابع للمجال سيكون ساكنا بالنسبة له و م ح= 0 مع زيادة أخرى في n، يدور الدوار بشكل أسرع من التوافقي السابع للمجال، فيما يتعلق به يظهر وضع تشغيل المولد و م 7< 0 (рис. 25-6).
يدور التوافقي الخامس للمجال في الاتجاه المعاكس، ويحدث الدوران المتزامن للدوار بالنسبة إليه في وضع الكبح - عندما ن =

= - nJ5أو ق = 6/5. منحنى عزم الدوران لهذا التوافقي ميظهر أيضًا في الشكل. 25-6.
يتم إنشاء منحنيات عزم دوران مماثلة بواسطة توافقيات المجال الأخرى، وبالتالي فإن منحنى عزم الدوران الناتج
وفقًا لـ GOST 186-52، نسبة الحد الأدنى لعزم الدوران أثناء عملية البدء إلى النسبة المقدرة للمحركات ذات القدرة 0.6-100 كيتلا ينبغي أن يكون أقل من 0.8.
مع لف الطور للدوار، يكون تشويه منحنى عزم الدوران ضئيلًا. هذا، من ناحية، يفسر بحقيقة أنه بسبب القيم الصغيرة لمعاملات اللف لمثل هذا اللف للتوافقيات الأعلى للمجال، فإن التوافقيات المستحثة e. د.س. صغير. من ناحية أخرى، فإن مقاومة التسرب الحثية لمثل هذا الملف للتيارات القادمة من توافقيات المجال الأعلى تكون كبيرة. وذلك لأن التيارات الناجمة التوافقي الخامسحقول الجزء الثابت في ملف الجزء المتحرك، بالإضافة إلى التوافقيات v-th، تنشئ أيضًا التوافقيات v = 1 لمجال الجزء المتحرك، وهو أكبر بكثير من التوافقيات و في هذه الحالةفيما يتعلق بالتوافقي الاستقرائي v-th يشكل مجالًا ضائعًا.
تسبب لحظات التوافقيات الأعلى خطرًا حقيقيًا في حالة لف الدوار ذو الدائرة القصيرة، لأنه في هذه الحالة يمكن إنشاء دوائر قصيرة للتيارات من التوافقيات الأعلى للمجال، والتي تتكون من قضبان وأقسام حلقات مجاورة أو قريبة ولها مقاومة منخفضة جدًا (الشكل 25-7). كلما زاد عدد فتحات الدوار، كلما زادت إمكانية تشكيل مثل هذه السلاسل. 1 % .

أقوى وأخطر التوافقيات هي توافقيات الجزء الثابت من النوع السني (انظر الفصل 22 والفقرة 23-1)
ولذلك الموقف 1 زو 1^ لا ينبغي أن تكون كبيرة جدًا. أكثر تحليل تفصيلييظهر السؤال أنه من أجل تجنب تشويه كبير لمنحنى اللحظة فمن الضروري اتخاذها
بجانب، تدبير فعاليقاتل ضد تأثير ضارالتوافقيات الأعلى للجزء الثابت على منحنى عزم الدوران هي شطبة فتحات العضو الثابت بتقسيم سن واحد للجزء الثابت، لأنه في هذه الحالة e. د.س. في قضبان الجزء المتحرك، تنخفض توافقيات أسنان الجزء الثابت إلى الصفر تقريبًا (انظر الفقرة 20-3). ومع ذلك، فإن هذا يزيد من الخسائر الإضافية الناجمة عن التيارات العرضية التي تتدفق بين القضبان المجاورة غير المعزولة من خلال الأسنان والجزء الخلفي من قلب عضو الإنتاج. لذلك في السنوات الاخيرةيتم تجنب شطبة الأخاديد، وإذا لزم الأمر، يتم استخدام شطبة تصل إلى نصف تقسيم الأسنان.
كما يظهر في الشكل. 25-6، نتيجة لعمل التوافقيات الأعلى، ينخفض \u200b\u200bعزم دوران المحرك أيضًا، وإن كان قليلاً، أثناء التشغيل العادي (s i؛ 0). وينعكس هذا في كفاءة المحرك.
تسمى لحظات التوافقيات الأعلى التي تمت مناقشتها أعلاه غير متزامنة، لأنها بطبيعتها هي بالضبط نفس اللحظة الكهرومغناطيسية الرئيسية لآلة غير متزامنة؛ فهي تنشأ نتيجة لتفاعل مجال توافقي معين مع التيارات (أو حقل مغناطيسي) للعضو المتحرك، المستحث (أو المنشأ) بواسطة نفس توافقي مجال الجزء الثابت، عند أي سرعة معينة لدوران الجزء المتحرك، له حجم واتجاه معين للعمل، نظرًا لأن توافقي الجزء الثابت هذا والمجال التوافقي للجزء المتحرك الناتج عنه من نفس الترتيب دائمًا يدور بشكل متزامن. لحظات متزامنةتنشأ نتيجة لتفاعل مثل هذه التوافقيات في مجالات الجزء الثابت والدوار، والتي لها نفس الترتيب v أو نفس تقسيمات القطب t v ، ولكن يتم إنشاؤها بشكل مستقل عن بعضها البعض (مثل المجالات المغناطيسية للجزء الثابت والدوار في متزامن آلة)، أي: ليس أي منها نتيجة لفعل آخر. تدور توافقيات المجال هذه بالنسبة لبعضها البعض بشكل غير متزامن، وبالتالي اعتمادًا على موقعها النسبي هذه اللحظةالوقت يخلق عزم دوران في اتجاه أو آخر (انظر الشكل 25-8، حيث يتم تصوير التوافقيات المدروسة للجزء الثابت والدوار بشكل تقليدي في شكل أقطاب مغناطيسية وتخلق قوى تعمل على الجزء المتحرك F).أثناء الدوران غير المتزامن، تخلق هذه التوافقيات عزم دوران متناوبًا عالي التردد، متوسط قيمته صفر. بسبب الكبير

لا تؤثر هذه اللحظة على القصور الذاتي الميكانيكي للدوار على حركة الدوار.
ومع ذلك، عند سرعة دوار معينة ومحددة جيدًا ن = n cv يمكن أن تدور هذه التوافقيات بشكل متزامن، وفي نفس الوقت، اعتمادًا على موضعها النسبي، يتم إنشاء عزم دوران إيجابي أو سلبي م السيرة الذاتيةبقيمة واحدة أو أخرى ضمن - م cvmKc ^ م السيرة الذاتية^ + مكفماكز.سيتم تصوير حجم هذه اللحظة على المنحنى م= و (ق)على شكل نقطة محددة على قطعة رأسية من خط مستقيم أب(الشكل 25-9). بسبب تأثير هذه اللحظة، عند بدء التشغيل، قد "يعلق" المحرك عند سرعة الدوران "cv" ولا "يصل" إلى السرعة العادية. ولكن خلافا ل لحظات غير متزامنةفي هذه الحالة، هناك احتمال كبير أن الدوار سوف يمر عبر منطقة العمل الخطير لعزم الدوران المتزامن بسبب القصور الذاتي. لذلك، إذا حدثت لحظات متزامنة بسرعة ص فأوه، إذن فهي أقل خطورة من اللحظات غير المتزامنة.
دعونا نفكر في مثال عندما يتم إنشاء عزم دوران متزامن بواسطة توافقيات ترتيب التروس، وهي الأقوى.
دع لف الجزء الثابت يكون ر س= 3, 1ر = أ، ض 1 = 24، أ الدوار قفص السنجابلديه Z 2 = 28. ثم فإن توافقيات ترتيب السن الأول، التي تم إنشاؤها بواسطة تيار الجزء الثابت وتيار التردد الأساسي f 2 = s/ t للجزء المتحرك، ستكون متساوية: توافقية الجزء الثابت المباشر

وبالتالي، فإن التوافقي الأمامي للجزء الثابت والتوافقي العكسي للجزء المتحرك لهما نفس الترتيب v"zl= v" 2 = 13. يدور الأول بالنسبة للجزء الثابت بسرعة نيوجيرسي\3,والثاني - نسبة إلى الدوار بالسرعة
أرز. 25-9. تشويه المنحنى
لحظات لحظة متزامنة
من التوافقيات المجال العالي
حيث ع = إن جي 7,أي أن عزم الدوران المتزامن يحدث في وضع المحرك أثناء البدء بسرعة تساوي سُبع السرعة المتزامنة.
في الحالة قيد النظر Z 2 - ب\ - 4 = 2 فرك.من السهل أن نرى أن العزوم المتزامنة تنشأ دائمًا نتيجة لتفاعل التوافقيات السنية من الدرجة الأولى عندما يدور الجزء المتحرك عند


حيث تتوافق علامة الطرح مع حدوث عزم الدوران المتزامن في وضع الكبح.
إذا ز 2 =- ض لايعندها تكون ترتيبات التوافقيات السنية المباشرة للعضو الثابت والدوار متساوية وتدور التوافقيات بشكل متزامن في اللحظة الأولى لبدء التشغيل، عند ص= 0. وينطبق الشيء نفسه على التوافقيات السنية العكسية. لذلك، في هذه الحالة، تتشكل لحظات متزامنة قوية عندما يكون الدوار ثابتًا ولا يستطيع الدوار التحرك.
ويترتب على ما سبق أنه من أجل تجنب لحظات متزامنة كبيرة من الضروري ذلك
عن 1,0
الشكل. 25-10 منحنى عزم الدوران التجريبي لمحرك غير متزامن مع 2r = 4، ض س = 24، ض 2 = 28
تنشأ أيضًا لحظات متزامنة أضعف قليلاً في العلاقات الأخرى بين ض%و ز.ت.
تنشأ قوى الاهتزاز الشعاعي عندما توجد في الفجوة الهوائية للآلة مجالات مغناطيسية تكون أعداد أزواج الأعمدة pi و p 2 قريبة من بعضها البعض. كمثال في الشكل. 25-11، ويتم عرض منحنيات الحث B 4 و B في حقلين موزعين جيبيًا مع 2p = 4 و2p = 6، بالإضافة إلى منحنى المجال الناتج J3 4 + في 6 .قوى الجذب الشعاعي F،يتناسب التأثير على الجزء الثابت والجزء الدوار مع (B 4 + B 6) 2 (الشكل 25-11، ب). على النحو التالي من الشكل. 25-11.6، مجموع قوى الجذب في أحد نصفي الدائرة أكبر بكثير من النصف الآخر. ونتيجة لذلك، يحدث جذب في اتجاه واحد للعضو الدوار إلى الجزء الثابت. إذا الحقول ب طو ب ستدور بالنسبة لبعضها البعض، وتدور قوى الاهتزاز أيضًا، مما يتسبب في اهتزاز الجزء المتحرك. وهذا الاهتزاز أكبر، كلما زاد الركود
في المحامل وانخفاض صلابة عمود الدوار. وفي الوقت نفسه، إذا كانت صلابة الجزء الثابت غير كافية، يحدث التشوه والاهتزاز.
في التين. 25-11، أيبين الحالة عندما ص سوR ز لم يكن لديك المقسومات المشتركة. في هذه الحالة، الفترة المكانية للقوى الشعاعية يساوي دائرةفجوة لو ص سو ص 2 لديهما قواسم مشتركة القاسم الأكبر ر> 1 إذن رفترات التوزيع المكاني للقوى F(على سبيل المثال، مع 2r = 8 و 2r = 12 منحنيان متتاليان في الشكل 25-11، ب).وفي هذه الحالة مائة
أرز. 25-11. توليد قوى اهتزاز شعاعية غير متوازنة


لن يكون هناك جذب مباشر للعضو المتحرك إلى الجزء الثابت، نظرًا لأن القوى متوازنة، ولكن يحدث تشوه يشبه الموجة في الجزء الثابت ونواة الجزء المتحرك.
عند بدء تشغيل محرك غير متزامن وتشغيله، هناك العديد من المجالات التوافقية المختلفة التي تدور بالنسبة لبعضها البعض ومن بينها مجالات ذات أعداد مماثلة من أزواج الأقطاب. ومع ذلك، فإن أعظم القوى الشعاعية والتشوهات وتنتج الاهتزازات عن المجالات ذات الأعداد الصغيرة من الأقطاب، حيث أن هذه المجالات عادة ما تكون الأقوى، كما أن توزيع القوى الشعاعية له فترة مكانية كبيرة، مما يسبب زيادة في التشوه.
عندما تتغير سرعة دوران العضو الدوار خلال فترة بدء التشغيل، تتغير أيضًا سرعات دوران قوى الاهتزاز الشعاعي وترددات الاهتزاز. في هذه الحالة، غالبًا عند قيم معينة لسرعة العضو الدوار، تحدث ظاهرة الرنين مع الترددات الطبيعية للعضو الثابت والعضو الدوار. يصبح الاهتزاز مهمًا.
تتسبب الاهتزازات الناتجة عن القوى الكهرومغناطيسية أيضًا في حدوث ضوضاء في الماكينة. عادة ما يكون هذا الضجيج أكبر بكثير من ضجيج تهوية الجهاز.
يتم تقليل الاهتزازات والضوضاء الكهرومغناطيسية بشكل كبير عندما تكون الأخاديد مشطوفة. وبالتالي، فإن شطبة الأخاديد هي إجراء فعال لمكافحة التأثير الضار للتوافقيات العليا في جميع جوانبها. ولذلك، يتم استخدام شطبة الأخاديد في بعض الأحيان محركات قفص السنجابقوة تصل إلى 20 كيتو اكثر. الجداول أرقام مواتيةفتحات الجزء الثابت ويتم توفير دوارات المحركات غير المتزامنة ذات القفص السنجابي في كتيبات تصميم الآلات الكهربائية.
§ 25-4. التباطؤ والدوامة واللحظات التفاعلية
لحظات التباطؤ والدوامة.بالإضافة إلى عزم الدوران الذي تمت مناقشته أعلاه، والذي ينشأ بسبب تفاعل التيارات في الملف مع المجال المغناطيسي، هناك لحظات ناجمة عن ظاهرة التباطؤ والتيارات الدوامية في قلب الجزء المتحرك.
عزم الدوران الناتج عن التيارات الدوامية، أو العزم الدوامي، م فييشبه تمامًا في طبيعته ما تمت مناقشته أعلاه لحظة كهرومغناطيسيةآلة، لأنها تنشأ نتيجة لتفاعل التيارات الدوامة المستحثة في قلب الدوار مع المجال المغناطيسي.
حدوث لحظة التباطؤ م زبسبب حقيقة أنه، بسبب ظاهرة التباطؤ في فولاذ قلب الجزء المتحرك، يحدث انعكاس مغنطة الجزء المتحرك بواسطة المجال المغناطيسي للجزء الثابت مع بعض التأخير فيما يتعلق بهذا المجال الذي يتحرك بالنسبة للجزء المتحرك. في هذه الحالة، يتم إزاحة موجات الحث المغناطيسي على أسطح الجزء الثابت والدوار بزاوية معينة<р г, который называется углом гистерезиса и зависит от магнитных свойств материала сердечника ротора. Такой сдвиг будет существовать и при синхронном вращении ротора. В результате получается такое же взаимное расположение волн индукции или «полюсов» магнитного поля статора и ротора, какое изображено на рис. 25-8. Рис. 25-8, أيتوافق مع وضع المحرك عندما يدور الدوار بشكل أبطأ من مجال الجزء الثابت ويحدث عزم التباطؤ م تي،يعمل في اتجاه دوران الدوار. أرز. 25-8، الخامسيتوافق مع وضع المولد، عندما يدور الدوار بشكل أسرع من المجال وفي نفس الوقت جبليتصرف في الاتجاه المعاكس. عند سرعة الجزء المتحرك المتزامن، يمكن أن تتوافق المواضع النسبية لـ "أقطاب" الجزء الثابت والعضو المتحرك مع كلا الموضعين في الشكل 1. 25-8، ive، وأي موضع وسيط، على وجه الخصوص هو مبين في الشكل. 25-8، ب، متى م ز= 0. ذلك يعتمد على الاتجاه ومقدار عزم الدوران الخارجي أو الطاقة الميكانيكية المطبقة على عمود الآلة. وهكذا، في سرعة متزامنة عزم الدوران التباطؤ مز يمكن أن تختلف عن بعض م تي تيقبل - م تي تي,
ويترتب على ما سبق أن لحظات التباطؤ والدوامة في أوضاع المحرك والمولدات تنتج عملاً مفيدًا وتطوير مفيدة
القوى الميكانيكية P g mx و P in mx، بالإضافة إلى العزم الكهرومغناطيسي الرئيسي للآلة
دعونا ننظر في التبعيات م زو م فيمن الانزلاق
تتناسب خسائر التباطؤ في قلب الجزء المتحرك p r2 مع تردد انعكاس المغنطة / 2 = sflyوخسارة التيار الدوامي p b2 تتناسب مع /|. ولذلك، عندما Ф = const
Prs = ^Pgao. Rva = s2 Pb2o. (25-40)
حيث R g20 و R v20 هما الخسائر المقابلة عند ن = 0 أو س=1.
تتطور القوى الميكانيكية P g mx و P in mx والخسائر p 2g و p b2 بسبب القوى الكهرومغناطيسية المقابلة P g.em و P in em، المنقولة من
الشكل 25-12 تبعيات التباطؤ
لا اذهب (م ز)ودوامة (M في) لحظات
من الانزلاق
الشكل 25-13 تمثيل حدوث لحظات التفاعل
الجزء الثابت إلى الجزء الدوار من خلال مجال مغناطيسي، وبالتالي توجد نفس العلاقات بينهما كما هو الحال بين P MX) p el2 وI em، والتي تمت مناقشتها في §24-5 ونتيجة لذلك، بناءً على التعبيرات (24-78) و(25-40) )
حيث p هو عدد أزواج القطب
وبناء على ما سبق والعلاقات (25-42)، يوضح الشكل 25-12 التبعيات م زو م فيمن الانزلاق تحت الشرط Ф = const.
في الآلات العادية غير المتزامنة، تتكون نوى العضو الدوار من صفائح من الفولاذ الكهربائي معزولة عن بعضها البعض، وتتميز بتباطؤ منخفض. م رو م فيفي هذه الآلات تكون صغيرة ولا تؤخذ بعين الاعتبار عند حساب الآلات، ومع ذلك فإن عمل بعض الأنواع الخاصة من الآلات غير المتزامنة والمتزامنة يعتمد بالكامل على عمل التيارات الدوامية أو ظواهر التباطؤ (انظر الفقرة 29-3، 41 6)
لحظات رد الفعلتنشأ بسبب حقيقة أن القوى الكهرومغناطيسية تعمل على جسم مغنطيسي يقع في مجال مغناطيسي (الشكل 25-13) F،


تسعى إلى تدوير هذا الجسم إلى موضع يتوافق مع أدنى مقاومة مغناطيسية للدائرة المغناطيسية. يمكن أن تحدث اللحظات التفاعلية في الآلات الكهربائية التي تحتوي على أقطاب بارزة أو بنية تروس للجزء الثابت والدوار. اعتمادًا على الظروف المختلفة، يمكن أن يكون لهذه النقاط تأثير ضار على تشغيل الآلة أو يمكن استخدامها للحصول على تأثير مفيد.
في الآلات غير المتزامنة، تنشأ عزم الدوران التفاعلي القوي عندما ض\= ز 2 . في هذه الحالة، تحت تأثير المجال المغناطيسي، تميل أسنان الجزء الثابت والدوار إلى وضع نفسها مقابل بعضها البعض.
سوف يعمل كل منهما الآخر على الجزء الثابت والدوار م ز ف 0 اتجاه أو آخر. محركات غير متزامنة مع زكس ~ ض 2بسبب عمل لحظات التفاعل هذه عند بدء التشغيل، فإنها غير قادرة على التحرك من مكانها (ما يسمى بظاهرة الالتصاق)، وعندما يدور الدوار، الدوار هناك لحظات نابضة. لحظات رد الفعل المذكورة هنا هي لحظات رد الفعل في ض س= من الصعب الخلط بين Z 2 واللحظات المتزامنة المذكورة في الفقرة 25-3، حيث أن الأخيرة تنشأ i ضكابينة نتيجة للتفاعل المغناطيسي
مجالات التوافقيات الأعلى الناتجة عن تيارات الجزء الثابت والدوار، بينما تنشأ عزم الدوران التفاعلي حتى عندما يكون ملف الجزء المتحرك مفتوحًا ولا يوجد فيه تيار. تجدر الإشارة إلى أن عزم الدوران التفاعلي الناتج عند Z x = Z 2 يمكن تقليله إلى الصفر عن طريق شطف الأخاديد.
في الأجهزة غير المتزامنة العادية ض ^و Z 2 عبارة عن أعداد كبيرة بدرجة كافية وليست متساوية وليست مضاعفات بعضها البعض. ولذلك، فإن أسنان الجزء الدوار الفردية تحتل مواقع مختلفة بالنسبة لأسنان الجزء الثابت ويكون إجمالي عزم الدوران التفاعلي مساويًا أو قريبًا من الصفر. في هذا الصدد، في الآلات العادية غير المتزامنة، لا يتم أخذ عزم الدوران التفاعلي بعين الاعتبار. ومع ذلك، فإن عمل بعض الأنواع الخاصة من الآلات الكهربائية يعتمد بالكامل على عمل عزم الدوران التفاعلي (انظر الفقرة 25-3، 41-4).

في لحظة بدء التشغيل، تكون سرعة دوار المحرك صفرًا، ويكتسب مجال الدوران على الفور سرعة متزامنة فيما يتعلق بالدوار، ونتيجة لذلك يتم تحفيز EMF كبير في ملف الدوار. في هذه الحالة، تكون تيارات الجزء المتحرك والجزء الثابت أعلى عدة مرات من قيمها الدنيا، لأنها تزيد مع زيادة انزلاق الجزء المتحرك، أي. مع انخفاض في سرعة دورانها (الشكل 10).
إن تيار البدء للمحركات غير المتزامنة مع دوار القفص السنجابي أعلى بمقدار 5-10 مرات من التيار المقدر (عزم الدوران المبدئي هو 1.1-1.8 من قيمة عزم الدوران المقدرة). نظرًا لأن هذا التيار يتدفق خلال لف المحرك لفترة قصيرة وفقط أثناء عملية التشغيل، إذا لم يكن تشغيل المحرك متكررًا جدًا، فإنه لا يسبب ارتفاع درجة حرارة المحرك الكهربائي. لذلك، عادةً ما يتم تشغيل المحركات الكهربائية غير المتزامنة منخفضة الطاقة بمجرد توصيلها بالشبكة. ومع ذلك، فإن تيار البدء الكبير للمحركات الكهربائية الكبيرة للشبكات الكهربائية التي تغذيها يسبب ارتفاعات مفاجئة وكبيرة في الجهد (خاصة في الشبكات منخفضة الطاقة)، مما يؤثر سلبًا على مستهلكي الكهرباء الآخرين المدرجين في نفس الشبكة.
كما يظهر في الشكل. 10، يكون عزم دوران المحرك غير المتزامن أقل بشكل ملحوظ من الحد الأقصى، ومع وجود حمل على عمود الدوار يتجاوز مع، لن يبدأ المحرك. علاوة على ذلك، إذا لم يتم فصل الجزء الثابت عن الشبكة، فإن تيار البدء الكبير سيؤدي إلى ارتفاع درجة حرارة اللفات وفشل المحرك.
لمنع المواقف غير المواتية الموصوفة، من الضروري الحد من تيار البدء للمحركات غير المتزامنة عند إمدادها بالجهد أو زيادة عزم الدوران.
يتم تقليل الجهد على اللفات للمحرك الكهربائي غير المتزامن أثناء بدء التشغيل بطرق مختلفة:
البدء في استخدام المحول الذاتي أو منظم الحث؛
البدء بتبديل ملف الجزء الثابت من النجمة إلى المثلث؛
بدءًا من إدراج مقاومة إضافية في ملف الجزء الثابت للمحرك.
ومع ذلك، مع انخفاض جهد التشغيل، ينخفض أيضًا عزم دوران المحرك غير المتزامن، لأنه يتناسب مع مربع جهد التشغيل. لذلك، يمكن تطبيق طرق البدء المحددة بشكل أساسي على محركات الآليات التي لا تتطلب عزم دوران كبير عند البدء (على سبيل المثال، بدء تشغيل محرك مروحة، محرك غير محمل، محرك خامل، إلخ).
يتم تشغيل محرك كهربائي غير متزامن مع دوار ملفوف باستخدام مقاومة متغيرة مع أقصى قدر من المقاومة رتحويلة، متصلة في سلسلة مع لف الدوار (انظر الشكل 3). في هذه الحالة، الانزلاق الحرج سك = ( ص" 2 +رتحويلة)/( X 1 +X" 2) يزداد حجم اللحظة الحرجة مك = 3 بو 1 2 /2 1 ( X 1 +X" 2) لا يتغير. تظهر خصائص الانزلاق اللحظي الاصطناعية مع مقاومة إضافية في الشكل. 11. الحجم ريتم تحديد ext بحيث يكون الانزلاق الحرج مساويًا للوحدة، ومن ثم سيزداد عزم الدوران إلى قيمة حرجة. يزيد ميحدث بسبب زيادة العنصر النشط للتيار. تنخفض القيمة الفعالة لتيار البداية.

ومع زيادة السرعة، يقل تردد دوران المجال المغناطيسي بالنسبة للجزء المتحرك. وبناء على ذلك، ينخفض المجال الكهرومغناطيسي والتيار الدوار. لذلك، مع زيادة سرعة المحرك، يمكنك تقليل قيمة مقاومة البداية في دائرة لف الدوار تدريجيًا ( ر" ext)، دون خوف من أن يرتفع التيار الحركي إلى قيم تشكل خطورة عليه. مع إزالة مقاومة مقاومة متغيرة البداية تمامًا ( ر"" تحويلة = 0) ينتهي بدء تشغيل المحرك. تتيح لك هذه الطريقة توفير عزم دوران المحرك اللازم لبدء التشغيل.
الآلات الكهربائية > نظرية
محرك غير متزامن
إذا وضعت إطارًا قصيرًا من النحاس أو الألومنيوم على عمود محرك كهربائي في مجال مغناطيسي دوار، فسوف يدور مع العمود في اتجاه دوران المجال. ويتم شرح هذه الظاهرة على النحو التالي. دع السرعة الزاوية لدوران الإطارن أقل بقليل من السرعة الزاوية لدوران المجاللا (دوران غير متزامن). في هذه الحالة، "ينزلق" الإطار بالنسبة للمجال. القيمة س = (ن س - ن )/ ن س يسمى زلة. بالنسبة للمجال المغناطيسي، يدور الإطار بسرعة زاوية تتناسب مع الانزلاق. ولذلك، يظهر فيه تيار تحريضي يتناسب مع السرعة النسبية لدوران الإطار، أي الانزلاق. وفقا لقانون لينز، يتفاعل التيار المستحث مع المجال بحيث يتم سحب الإطار بواسطة المجال.
وبما أن المجال المغناطيسي يدور، فإن ذلك يؤدي إلى دوران الإطار. يتناسب عزم الدوران المؤثر على الإطار مع التيار المستحث وبالتالي مع الانزلاق. يتم موازنة عزم الدوران هذا بواسطة الحمل الخارجي. وبالتالي، في هذا النوع من التثبيت، يدور الإطار دائمًا بشكل أبطأ إلى حد ما من دوران المجال. ويسمى هذا التدويرغير متزامن (أي غير متزامن وغير متناسق). تم تسمية المحرك نفسهغير متزامن
يعد المحرك غير المتزامن هو الأكثر شيوعًا كمحرك كهربائي لآليات مختلفة نظرًا لبساطته وموثوقيته. . يتم استخدامها لقيادة الآلات والآليات التي لا تتطلب سرعة دوران ثابتة تمامًا وتعديلها. أهم مزايا هذا المحرك هي بساطة تصميمه وموثوقيته الأكبر بسبب عدم وجود ملامسات منزلقة. يتمتع المحرك بعزم دوران كافٍ ويمكن عكسه بسهولة (أي أنه من السهل تغيير اتجاه دوران الدوار فيه). ونتيجة لذلك، تعد المحركات غير المتزامنة أكثر الآلات الكهربائية شيوعًا في مجال التكنولوجيا. يتم تحويل أكثر من 60% من إجمالي الطاقة المولدة في العالم إلى طاقة ميكانيكية، وذلك باستخدام المحركات غير المتزامنة بشكل رئيسي. تتراوح قوة المحرك من عشرات واط إلى مئات كيلووات.
يتم تصنيع المحرك غير المتزامن في إصدارات أحادية الطور ومرحلتين وثلاث مراحل.
مبدأ التشغيل
خذ بعين الاعتبار مجال التيار المتردد الدوار لدائرة ثلاثية الطور لمحرك تحريضي على شكل قفص سنجابي مع ثلاث لفات مزاحة محيطيًا بمقدار 120 درجة ومتصلة على شكل نجمة.
يتم تزويد اللفات الجزء الثابت بجهد متماثل ثلاثي الطور. المرحلة الأولية للتيار في الملف A-x تساوي الصفر. ثم:

تصميم
يتكون المحرك غير المتزامن من الجزء الثابت والدوار. الجزء الثابت عبارة عن غلاف مصبوب (من الفولاذ أو الحديد الزهر) ذو شكل أسطواني. يوجد داخل الجزء الثابت دائرة مغناطيسية ذات أخاديد مقطوعة يتم وضع ملف الجزء الثابت فيها. يتم إخراج نهايات اللفات في الصندوق الطرفي ويمكن توصيلها إما في مثلث أو على شكل نجمة. يتم إغلاق مبيت الجزء الثابت عند الأطراف بدروع تحمل يتم فيها الضغط على محامل عمود الدوار. يتكون الدوار من عمود فولاذي ذو قلب مغناطيسي مضغوط عليه.
بناءً على تصميم الدوارات، تنقسم المحركات إلى مجموعتين. الأول مزود بدوار على شكل قفص سنجابي والثاني مزود بدوار ملفوف. بالنسبة للمحرك الذي يحتوي على دوار على شكل قفص سنجابي، يتم صب قضبان الألومنيوم في الأخاديد ويتم عمل دائرة قصر عند الأطراف. يحتوي دوار الطور على ثلاث لفات متصلة في النجم. ترتبط أطراف اللف بحلقات مثبتة على العمود. عند البدء، يتم الضغط على الفرش الثابتة على الحلقات التي ترتبط بها المقاومة. في اللحظة الأولى لبدء التشغيل، يكون الدوار في حالة قفل، ثم تقل المقاومة ويبدأ المحرك بسلاسة، مما يسمح بتقليل تيار البدء.
يتم توفير جهد ثلاثي الطور لملفات الجزء الثابت، ويدور العضو المتحرك من خلال مجال مغناطيسي دوار تم إنشاؤه بواسطة نظام التيار ثلاثي الطور.
في الوقت ر 1
:
![]() . إذا كانت المرحلة A الحالية إيجابية، أي. يتدفق من البداية إلى النهاية، إذن، باستخدام قاعدة المروحة اليمنى، يمكننا إيجاد نمط توزيع المجال المغناطيسي للوقت t 1
.
. إذا كانت المرحلة A الحالية إيجابية، أي. يتدفق من البداية إلى النهاية، إذن، باستخدام قاعدة المروحة اليمنى، يمكننا إيجاد نمط توزيع المجال المغناطيسي للوقت t 1
.
في لحظة من الزمنر 2 ناقل الحث المغناطيسي الناتج Bم سوف يستدير قاب قوسين أو أدنىأ 1 ثم في اتجاه عقارب الساعة مع فترة دوران قدرها 360 درجة. على سبيل المثال، الزاويةأ 1 = 60 درجة.
وبالتالي، فإن الحث المغناطيسي هو مجال دوار ذو سعة
خلال الفترة يقوم الحقل بثورة واحدة،، (حيث f = 50 هرتز)، وهو التردد الصناعي لجهد وتيار مصدر التيار المتردد.
إذا كان المجال الدوار جيبيا، فإن سرعتهلا يساوي النسبةأ f/p (حيث p هو عدد أزواج القطب). في المثال قيد النظر، p = 1 وسرعة الدوران تساوي 3000 دورة في الدقيقة، على التوالي. إذا تضاعف عدد الملفات في كل مرحلة، وتم الحفاظ على تحول الطور بين التيارات عند 120 درجة، فإن سرعة الدوران ستنخفض بمقدار النصف بسبب زيادة عدد أزواج الأقطاب. من مميزات المحرك غير المتزامن ذو القفص السنجابي وجود سرعة دوران ثابتة لمجال الجزء الثابت، يتم تحديدها بواسطة عدد أزواج القطب.
إذا قمت بتبديل أي مرحلتين، فسيظهر حقل تسلسل عكسي وسيبدأ الدوار في الدوران في الاتجاه الآخر. ميزة أخرى للمحركات غير المتزامنة هي الاختلاف في تردد دوران حقول الجزء الثابتن س والدوار ن مما يجعل تفاعلهم الكهرومغناطيسي ممكنًا. في هذه الحالة، يبدو أن مجال الجزء المتحرك ينزلق بالنسبة إلى مجال الجزء الثابت
حيث s هو الانزلاق، عند قوة المحرك المقدرة يكون الانزلاق 0.01-0.03.
يقوم المجال المغناطيسي الدوار الرئيسي بتحريض EMF في ملفات الجزء الثابت والدوار، على غرار المحول، حيث أنه مع الدوار المفتوح، يكون المحرك التعريفي محولًا في وضع عدم التحميل:
حيث يشير الفهرس 1 إلى معلمات الجزء الثابت، و2 إلى معلمات الجزء الدوار؛ لتبادل - معاملات اللف التي تحددها طريقة وضع اللفات (حلقة أو موجة). لأوبم =0.92-0.98؛ ه 2 ق = ه 2 ق؛ ه 2 - القيمة الفعالة للمجال الكهرومغناطيسي للعضو المتحرك الثابت عند s = 1؛ F 2 = و 1 س .
في المحرك غير المتزامن، بالإضافة إلى التدفق المغناطيسي الرئيسي، يتم إنشاء تدفقات التسرب. واحد يغطي موصلات الجزء الثابت، والآخر يغطي الدوار. تتميز تدفقات التسرب بالمفاعلات الحثية المقابلة X 1 وX 2 ق.
معادلات الحالة الكهربائية لأطوار اللفات الجزء الثابت والدوار:
عزم دوران المحرك غير المتزامن
تدوير عزم الدوران الكهرومغناطيسي للمحرك وفقًا لقانون القوى الكهرومغناطيسية
![]()
أين
سم - ثابت بناء.
ي 2 ق - تحول الطور بين التدفق الحالي والمغناطيسي.
الحد الأقصى لنسبة عزم الدوران Mالأعلى إلى الاسمي من يحدد سعة التحميل الزائد للمحرك وهي 2.0-2.2 (مذكورة في بيانات الكتالوج). الحد الأقصى للحظة يتوافق مع الانزلاق الحرجل ، تحددها المقاومة النشطة والحثية للمحرك، وتتناسب مع المقاومة النشطة للدائرة الدوارة.
الخسائر في محرك غير متزامن
وتنقسم الخسائر إلى خسائر الجزء الثابت والدوار. تتكون خسائر الجزء الثابت من الخسائر الكهربائية في الملف P e1 والخسائر في الصلب Rشارع والخسائر في الدوار - من الكهرباء P e2 والميكانيكية Pالفراء بالإضافة إلى خسائر إضافية للاحتكاك والتهوية Pتحويلة.

حيث يتم تحديد K = 2.9-3.6 بواسطة قطر الجزء الثابت D 1
.
تكون الخسائر في الفولاذ في وضع التشغيل أصغر بعدة مرات من الخسائر الكهربائية في الدوار وعادةً ما يتم إهمالها.
تتراوح كفاءة المحرك غير المتزامن من 0.75 إلى 0.95.
يتناسب عزم تشغيل المحرك مع مربع الجهد، وهو ما يجب مراعاته عند تشغيل المحرك في شبكات التوزيع الطويلة. يتوافق عزم الدوران المقدر مع الانزلاق المقدر، ويتوافق عزم الدوران المقدر مع sص .  يظهر في الشكل اعتماد عزم دوران المحرك على الانزلاق M=f(s).
يظهر في الشكل اعتماد عزم دوران المحرك على الانزلاق M=f(s).
في المنطقة من 0 إلى Mالأعلى يعمل المحرك في وضع مستقر، والقسم منس ك يسمى وضع توقف المحرك، حيث يتوقف المحرك نتيجة التحميل الزائد ولا يمكنه العودة إلى وضع التشغيل دون بدء تشغيل آخر. يتم تحديد خصائص بدء المحرك من خلال نسبة عزم الدوران Mص والاسمي. وفقًا لبيانات الكتالوج فهي 1.6-1.7. عند بدء تشغيل محرك غير متزامني صغير جدًا ويمكن أن يزيد تيار البدء في ملف الجزء الثابت بمقدار 5-7 مرات مقارنة بالتيار المقدر. إنه محدود عن طريق تغيير تردد جهد الإمداد لمحرك ذو دوار قفص سنجابي وزيادة المقاومة النشطة في دائرة الدوار لمحرك ذو دوار طور.بالنسبة للآليات التي لديها ظروف بدء صعبة، حيث يكون من المرغوب فيه استخدام محرك غير متزامن مع دوار قفص السنجاب، يتم استخدام المحركات ذات خصائص البدء المحسنة: مع عزم دوران أعلى وتيار بدء أقل من المحركات ذات الأغراض العامة.
الخصائص الميكانيكية للمحرك غير المتزامن
 يسمى اعتماد سرعة الدوران على الحمل على عمود المحرك بالخاصية الميكانيكية للمحرك غير المتزامن.
يسمى اعتماد سرعة الدوران على الحمل على عمود المحرك بالخاصية الميكانيكية للمحرك غير المتزامن.
يتوافق القسم AB من الخاصية الميكانيكية مع وضع التشغيل المستقر للمحرك غير المتزامن. تؤدي الزيادة في الحمل (عزم الكبح) إلى انخفاض طفيف في سرعة الدوار، مما يؤدي إلى زيادة في عزم الدوران. عندما يتجاوز عزم الكبح قيمة حرجة، يتوقف المحرك. النقطة B على الرسم البياني تتوافق مع نقطة اللحظة الحرجة أو الانقلاب.
تنظيم السرعة
يمكن تنظيم سرعة الدوران بثلاث طرق: تغيير تردد جهد الإمداد، وتبديل عدد أزواج الأقطاب، وتغيير الانزلاق.
لتنظيم سرعة دوران المحركات ذات القفص السنجابي، يتم حاليًا استخدام محولات التردد مع التحكم في المعالجات الدقيقة على نطاق واسع.
أوضاع الكبح
تحدث أوضاع الكبح في السيارة في ظل ظروف معينة أو يتم إنشاؤها بشكل مصطنع لتسريع عملية إيقاف المحرك. يمكن أن يكون الكبح:
- مولد مع إخراج الطاقة إلى الشبكة؛
- مكافحة الإدماج؛
- متحرك.
مولد كهرباء وضع الكبح هو وضع تشغيل المحرك عندما يدور دوار المحرك، تحت تأثير عزم دوران خارجي، في نفس اتجاه المجال المغناطيسي، ولكن بسرعة أعلى.
وضع الكبحمعارضةيحدث عندما يدور الدوار، تحت تأثير عزم الدوران الخارجي المطبق على عمود المحرك، في الاتجاه المعاكس بالنسبة للمجال المغناطيسي الدوار.
متحرك يتم الحصول على وضع الكبح عن طريق فصل ملف الجزء الثابت عن الشبكة الحالية ثلاثية الطور وتوصيله بمصدر طاقة التيار المستمر أثناء الكبح.
اختيار المحرك
صيغ الحساب لاختيار المحرك هي:
يتم اختيار المحرك من الكتالوج على النحو التالي. بناءً على عزم الدوران المحدد لآلية العمل وسرعة الدوران، يتم تحديد الطاقة المطلوبة. بعد ذلك يتم تحديد الظروف البيئية واختيار التصميم بناءً على نوع التثبيت وارتفاع محور عمود عمل المحرك. بمعرفة هذه المعلمات، يتم التحقق من سعة التحميل الزائد المطلوبة والكفاءة والكتلة ولحظة القصور الذاتي باستخدام الكتالوج.
بالنسبة لظروف الألغام، يتم استخدام محركات مقاومة للانفجار؛ لآليات الرافعة - المحركات ذات الانزلاق المتزايد، إلخ.
تستخدم الأجهزة المنزلية محركات أحادية الطور. يختلف المحرك أحادي الطور عن المحرك ثلاثي الطور من حيث أن ملف الجزء الثابت الخاص به متصل بمصدر طاقة أحادي الطور. الدوار هو قفص السنجاب. يحتوي الجزء الثابت على ملفين، يتم إزاحة محاورهما بالنسبة لبعضهما البعض بمقدار 90 درجة كهربائية. أحدهما يسمى العمل والآخر يسمى البدء.
خصائص أداء المحرك غير المتزامن

تعتمد خصائص التشغيل للمحرك غير المتزامن على قوة العمود P 2
المعلمات مثل عزم الدوران وسرعة الدوران والتيار الثابت والكفاءة وكوسي ويبين تحليل الخصائص أن سرعة الدوار تتناقص مع زيادة الحمل، وأن عزم الدوران يتناسب معها. يتغير تيار الجزء الثابت وفقًا لقانون غير خطي يرتبط بالنظام المغناطيسي للمحرك وعند P 2
يتم تحديد =0 بواسطة تيار عدم التحميل، والذي يصل إلى 40% من قيمته الاسمية.
تستخدم أنظمة التحكم محركات يتم فيها توصيل أحد ملفات الجزء الثابت باستمرار بشبكة التيار المتردد (ملف الإثارة) ويتم توفير جهد التحكم للثاني (ملف التحكم). تنتمي هذه المحركات إلى فئة الآلات الدقيقة.
تُستخدم الآلات الدقيقة في أنظمة المعلومات، حيث تؤدي وظائف المحولات الأولية لعمليات الحوسبة في أنظمة الأتمتة والميكانيكا عن بعد.
أحد الأمثلة على ذلك هو المزامن المصمم لنقل الحركات الزاويّة عبر مسافة للأعمدة غير المتصلة ميكانيكيًا ببعضها البعض. حسب التصميم، يتم تقسيم selsyn إلى الاتصال وعدم الاتصال. تتوفر مزامنة جهات الاتصال في نسختين. في إحداهما، يوجد الملف الميداني على الدوار، والملف ثلاثي الطور، الذي يسمى ملف التزامن، موجود في فتحات الجزء الثابت. وفي نسخة أخرى هو العكس. عندما يتم تشغيل ملف التزامن إلى جهد أحادي الطور، يخلق التيار مجالًا مغناطيسيًا نابضًا، مما يؤدي إلى تحفيز EMF متناوب في كل مرحلة من ملف التزامن. تعتمد القيمة الفعالة للمجال الكهرومغناطيسي لكل مرحلة على موقع محاور هذه المراحل بالنسبة لمحور تدفق الإثارة.
في أبسط الحالات، تتكون دائرة النقل عن بعد للحركات الزاوية من مزامنين متطابقين، حيث يتم توصيل نفس أطراف ملفات المزامنة بواسطة أسلاك خط الاتصال، ويتم تزويد ملفات الإثارة بجهد التيار الكهربائي. يُسمى أحد مستشعرات selsyn بمستشعر selsyn، ويسمى الآخر بمستقبل selsyn.
صفحة 1
يميز عزم الدوران الأولي Mstart خصائص البدء للمحرك غير المتزامن.
عزم الدوران الأولي للمحركات الممانعة، وكذلك للمحركات المتزامنة ذات اللفات الميدانية والمغناطيس الدائم، هو صفر.
| رسم تخطيطي متجه لمحرك نفاث. |
عزم الدوران الأولي للمحركات الممانعة، وكذلك للمحركات المتزامنة ذات اللفات الميدانية والمغناطيس الدائم، هو صفر. لذلك، يجب أن تحتوي المحركات النفاثة على ملف بدء على شكل قفص سنجابي لبدء التشغيل غير المتزامن.
يكون عزم الدوران الأولي أكبر بكثير عند وجود ملف نحاسي على الدوار. في هذه الحالة، يكون الانزلاق الحرج أكبر قليلاً، وهو مناسب لتنظيم سرعة الدوار في نطاق صغير باستخدام خنق التحكم.
عزم الدوران الأولي (s 1) للمحركات المتزامنة عند U ويجب أن يكون كبيرًا بدرجة كافية: Mn (0 8 n - 1 0) Mya. من ناحية أخرى، بالنسبة للأجزاء الصغيرة، يجب أن يكون عزم الدوران Ma كبيرًا أيضًا، لأنه بخلاف ذلك، عند البدء تحت الحمل، لن يتمكن المحرك في الوضع غير المتزامن من تحقيق سرعة دوران قريبة بدرجة كافية من المتزامن، والمحرك، بعد ذلك لن يؤدي تشغيل تيار الإثارة إلى التزامن. من الواضح أنه كلما زاد Mvx، كانت الظروف أفضل للانسحاب إلى التزامن.
عزم الدوران الأولي هو عزم الدوران الذي يطوره المحرك عندما يكون الدوار ثابتًا. يعتمد حجم عزم الدوران بشكل كبير على مادة وتصميم ملف البداية.
يجب أن يكون عزم الدوران الأولي (s 1) للمحركات المتزامنة عند U [ / كبيرًا بدرجة كافية: Ma (0 8 - g - 1 0) Mn. من ناحية أخرى، بالنسبة للأجزاء الصغيرة، يجب أن يكون عزم الدوران Ma كبيرًا أيضًا، لأنه بخلاف ذلك، عند البدء تحت الحمل، لن يتمكن المحرك في الوضع غير المتزامن من تحقيق سرعة دوران قريبة بدرجة كافية من المتزامن، والمحرك، بعد ذلك لن يتم سحب تشغيل تيار الإثارة إلى التزامن. عادةً ما يتم تحديد ميل الخاصية Ma f (s) عند s الصغيرة بقيمة Ma عند s 0 05، وتسمى هذه اللحظة تقليديًا لحظة الإدخال Mvx. من الواضح أنه كلما زاد Mvx، كانت الظروف أفضل للدخول في التزامن.
يجب أن يكون عزم الدوران الأولي للمحرك الكهربائي أعلى بنسبة 10% على الأقل من عزم المقاومة الأولي لآلية القيادة.








 الأشجار والشجيرات")















