Машины переменного тока подразделяются на синхронные и асинхронные. Группа асинхронных машин представлена на практике главным образом трехфазными асинхронными двигателями, самыми распространенными из всех типов двигателей. В силу обратимости трехфазная асинхронная машина может работать и в режиме генератора, что имеет место в тормозных режимах. Однако, использование асинхронных машин в качестве генераторов в связи с осложнениями, возникающими при их работе в этом режиме и несомненными преимуществами синхронных генераторов, не применяется. Однофазные асинхронные двигатели получили свое распространение только в виде двигателей малой мощности. Синхронные машины переменного тока получили наибольшее распространение как трехфазные генераторы, в основном это все генераторы на современных электрических станциях. Трехфазные синхронные двигатели получили преимущественно применение в качестве привода мощных производственных машин.
Асинхронная машина - такая машина, в которой преобразование энергии осуществляется посредством вращающегося магнитного поля, возбуждаемого переменным током частотой , поступающим из сети. Основным принципом работы является то, что ротор вращается со скоростью n 2 отличающееся от скорости вращения магнитного поля n 1 , называемой синхронной скоростью двигателя. В большинстве асинхронных двигателей магнитное поле создается системой трехфазного тока. При работе в качестве двигателя ротор вращается медленнее, чем магнитное поле. Если ротор с помощью первичного двигателя вращается быстрее, чем магнитное поле, то машина является генератором. Как в режиме двигателя, так и режиме генератора скорость вращения ротора асинхронной машины зависит от нагрузки.
Неподвижная часть машины - статор, состоит из стального сердечника и расположенных на нем трех обмоток, оси которых сдвинуты на угол 120 0 одна относительно другой, подключенные к источнику трехфазного тока. Сердечник статора имеет форму полого цилиндра, вдоль образующих внутренней поверхности которого, сделаны пазы. В диаметрально противоположных пазах статора уложены стороны трех катушек обмотки. В полости статора расположен ротор, представляющий собой цилиндрический сердечник, в диаметрально противоположных пазах которого, уложены короткозамкнутые витки. Если катушки статора соединить между собой в звезду или треугольник, то симметричная трехфазная цепь питания создает в магнитной системе машины вращающееся магнитное поле.
При вращении магнитного поля токов статора со скоростью n 1 , в проводниках ротора наводится ЭДС. Под действием ЭДС в короткозамкнутых витках ротора возникнут токи, взаимодействующие с вращающимся магнитным полем. Это взаимодействие проявится в возникновении электромагнитных сил, действующих на ротор. Если электромагнитные силы, действующие на неподвижный ротор, превышают тормозные усилия на его валу, то он получит ускоренное движение в направлении вращения магнитного поля. По мере возрастания скорости вращения ротора относительная скорость движения его проводников в равномерно вращающемся поле уменьшается, вследствие чего уменьшается и величина тока в них. Процесс изменения тока и скорости вращения ротора прекратиться, как только наступит устойчивое равновесие между моментом электромагнитных сил, вызывающих вращение ротора, и тормозным моментом, создаваемым устройством, приводимым в движение электрической машиной. В этих условиях ротор машины будет вращаться с постоянной скоростью и в его короткозамкнутых контурах установятся токи, обеспечивающие создание вращающего момента, равного тормозному. Таким образом, принцип работы асинхронных двигателей основан на взаимодействии вращающегося магнитного поля с токами, которые наводятся этим полем в проводниках ротора.
Одной из важнейших величин, характеризующих работу асинхронного двигателя, является скольжение ротора, под которым понимают отношение:
где - частота вращения ротора;
Частота вращения магнитного поля;
Число пар полюсов двигателя.
Для большинства современных типов асинхронных двигателей скольжение ротора при номинальной нагрузке заключено в пределах 2-6%.
При отсутствии нагрузки, когда двигатель работает вхолостую, и вращению ротора препятствуют лишь незначительные силы трения, скольжение очень мало и не превосходит десятых долей процента. С увеличением нагрузки скорость вращения ротора уменьшается, а скольжение и вращательный момент соответственно увеличиваются. Однако увеличивается ток в роторе и потери электрической энергии.
Электромагнитные процессы в асинхронном двигателе аналогичны процессам, происходящим в трансформаторе. Обмотку статора двигателя можно рассматривать как первичную обмотку трансформатора, а обмотку ротора - как вторичную. Особенностью двигателя по сравнению с трансформатором является то, что в его статорной и роторной обмотках действуют ЭДС и токи разных частот.
Величины этих ЭДС определяются по формулам:
где - ЭДС обмотки статора,
ЭДС обмотки неподвижного ротора,
И - соответственно обмоточные коэффициенты обмоток статора и ротора,
И - число обмоток статора и ротора,
Основной магнитный поток,
Частота тока цепи,
Частота ЭДС ротора. Из этого соотношения следует, что частота ЭДС ротора пропорциональна скольжению.
При неподвижном роторе , т.е частота тока и ЭДС ротора равна частоте ЭДС и тока статора и равна частоте питающего напряжения. Векторная диаграмма в этом режиме, называемым холостым ходом, аналогична соответствующей векторной диаграмме трансформатора.
ЭДС во вращающемся роторе .
Индуктивное сопротивление вращающегося ротора:
Активное сопротивление ротора не зависит от частоты.
По закону Ома ток в роторе равен:
 .
.
Электрическая мощность, подведенная к двигателю из сети ![]() , преобразуется в нем в механическую. Преобразование энергии сопровождается потерями. Часть подводимой мощности тратится на потери в стали машины - и на потери в меди статора, т.е. на нагрев обмотки статора .Остальная мощность электромагнитным путем передается на ротор и называется электромагнитной мощностью . Часть мощности. Переданной на ротор, тратится на нагрев меди обмоток ротора и зависит от скольжения
, преобразуется в нем в механическую. Преобразование энергии сопровождается потерями. Часть подводимой мощности тратится на потери в стали машины - и на потери в меди статора, т.е. на нагрев обмотки статора .Остальная мощность электромагнитным путем передается на ротор и называется электромагнитной мощностью . Часть мощности. Переданной на ротор, тратится на нагрев меди обмоток ротора и зависит от скольжения ![]() . Остальная часть мощности называется полной механической мощностью . Если из полной механической мощности вычесть механические потери и добавочные потери то получится полезная мощность на валу двигателя .
. Остальная часть мощности называется полной механической мощностью . Если из полной механической мощности вычесть механические потери и добавочные потери то получится полезная мощность на валу двигателя .
КПД асинхронного двигателя:
 , где .
, где .
Величина КПД асинхронных двигателей составляет от 0,7 до 0,9 и выше.
Механическая мощность ротора:
![]() ,
,
где - вращающий момент двигателя.
Электромагнитная мощность вращающегося магнитного поля:
![]() .
.
Основные режимы работы асинхронного двигателя это
1) пуск двигателя в ход,
2) холостой ход двигателя,
3) рабочий режим двигателя, в частности режим при полной номинальной нагрузке.
Рабочий режим двигателя при номинальной нагрузке характеризуется номинальными параметрами различными для каждого асинхронного двигателя. Основным номинальным параметром асинхронного двигателя является его номинальная мощность . Это мощность выражается в киловаттах и соответствует той наибольшей механической мощности на валу двигателя, которая может быть полезно отдана механизму, приводимого двигателем во вращение. Работа двигателя с нагрузкой превышающей его номинальную мощность, рассматривается как перегрузка и потому длительно не допустима.
Вторым параметром двигателя является его номинальная скорость вращения .
Важным электрическим параметром является напряжение, для которого предназначен двигатель . Номинальный ток двигателя устанавливается, исходя из номинальной мощности двигателя и номинального напряжения. К номинальным параметрам относят также номинальный коэффициент мощности двигателя. ,
При пуске двигателя с короткозамкнутым ротором скорость вращения ротора в первый момент , чему соответствует максимальное скольжение , двигатель находится в режиме короткого замыкания. Ток в роторе имеет наибольшее значение и наибольший сдвиг фаз по отношению к ЭДС. При этом пусковой ток статора в 4-10 раз больше номинального. Пусковой момент составляет 0,9 - 1,8 от номинального момента. По мере разгона двигателя величина пускового тока быстро уменьшается. Большая величина пускового тока вызывает резкие колебания напряжения в сети, что плохо отражается на работе других потребителей. При включении двигателей в мощные энергосистемы эти колебания нивелируются, поэтому используется прямой пуск - включением обмотки статора на полное напряжение цепи. Для уменьшения пускового тока асинхронных двигателей с короткозамкнутым ротором применяют способы, позволяющие понизить на время пуска напряжение, подводимое к статору: переключение обмотки статора со звезды на треугольник, запуск двигателя через автотрансформатор, включение дополнительного сопротивления в обмотку статора. При запуске двигателя через автотрансформатор уменьшение пускового тока в цепи произойдет в раз, где - коэффициент трансформации автотрансформатора. Однако недостатком этих способов является уменьшение пускового момента, величина которого пропорциональна квадрату напряжения сети: .
Асинхронный двигатель с фазным ротором пускается в ход с помощью пускового реостата, включенного последовательно с обмоткой ротора.
Пусковые качества двигателей характеризуются коэффициентами кратности пускового тока и пускового момента .
Для частоты вращения двигателя используются:
1) изменение частоты вращения магнитного поля (частоты питающего напряжения),
2) переключение пар полюсов,
3) изменение активного сопротивление фазного ротора с помощью трехфазного реостата, включаемого так же как пусковой.
В синхронном двигателе
частота вращения двигателя равна частоте вращения магнитного поля: ![]() .
.
Основными характеристиками синхронного двигателя являются угловая, механическая и регулировочная. Угловая характеристика определяет зависимость вращающего момента от угла между ЭДС и напряжением:
где - угол между векторами ЭДС и напряжения, т.е. ,
Полное индуктивное сопротивление двигателя.
На специальных электростанциях, покрывающих пиковые нагрузки в энергосистемах, синхронная машина работает генератором в часы максимума нагрузки и двигателем - в остальное время, перекачивая с помощью гидротурбины, которая теперь становится насосом, воду в водохранилище, создавая необходимый запас её для последующей работы. Такие агрегаты называют обратимыми.
Принципиально конструкция синхронной машины такая же, как у машин переменного тока. Синхронная машина так же состоит из двух частей: неподвижной части - статора и вращающейся части - ротора и имеет две обмотки. Одна обмотка подключается к источнику постоянного тока и создает основное магнитное поле машины. Это обмотка возбуждения. Другая обмотка является обмоткой якоря и состоит из одной, двух или трех фаз. В обмотке якоря индуцируется основная ЭДС машины. В синхронных машинах наибольшее распространение получила конструкция, когда обмотка якоря располагается на статоре, а обмотка возбуждения - на роторе.
Особенностью синхронных машин является то, что ротор должен быть раскручен к моменту присоединения переменного тока, при этом должны выполнятся следующие условия: переменный ток, протекающий через обмотку статора, должен быть таким, чтобы его взаимодействие с магнитным полем постоянного тока создавало силу требуемого направления, иначе, вместо того чтобы поддерживать вращение, электромагнитное взаимодействие будет ему препятствовать.
Поэтому для присоединения синхронной машины к сети необходимо не только придать вращению ротора нужную скорость, но и убедиться в том, что ход изменения напряжений на машине и в сети одинаков.
Синхронные машины должны вращаться со строго определенной скоростью. Уменьшение скорости хотя бы на 1% приводит к тому, что изменения тока в обмотке переменного тока перестают соответствовать изменениям в положении обмотки постоянного тока, они как бы выпадают из такта, машина выпадает из синхронизма: обмотка постоянного тока подвергается усилиям, направленным то в одну, то в другую сторону, и машина останавливается.
Синхронные двигатели и синхронные генераторы устроены совершенно одинаково. Во всяком синхронном двигателе, приведенном во вращение, начинает наводиться ЭДС, если только в его обмотке возбуждения протекает ток.
Для того чтобы увеличивать или уменьшать напряжение синхронного генератора, нужно изменять величину постоянного тока, при этом будет изменяться величина магнитного потока, чем больше будет изменяющийся магнитный поток, тем больше будет и напряжение, наводимое в машине (разумеется, при постоянстве других условий).
Постоянный ток, создающий магнитное поле в синхронной машине, называют током возбуждения. Чем больше ток возбуждения, тем больше напряжение, наводимое в машине.
Машины переменного тока предназначены для преобразования механической энергии в электрическую (генераторы) или для преобразования электрической энергии в механическую (двигатели).
Они подразделяются на:
Асинхронные
Синхронные
У первых частота вращения магнитного поля отличается от частоты вращения ротора, а у вторых - нет.
Асинхронные и синхронные МПТ бывают:
С короткозамкнутым ротором
С фазным ротором
В зависимости от количества фаз они делятся на однофазные, двухфазные и трехфазные.
78. Устройство, принцип действия и характеристики трёхфазных асинхронных двигателей.
Основными частями АД являются неподвижный статор и вращающийся ротор, разделённые воздушным зазором.
Статор состоит из алюминиевого или чугунного корпуса, внутри которого находится сердечник статора – полый цилиндр из изолированных друг от друга листов электротехнической стали. На внутренней поверхности этого цилиндра в пазах размещена трёхфазная обмотка из трёх одинаковых частей, называемых фазами. Фазы обмотки соединяются звездой или треугольником и подключаются к трёхфазной сети.
Ротор представляет собой цилиндрический сердечник из изолированных друг от друга листов электротехнической стали с пазами на наружной поверхности, в которых размещаются проводники обмотки ротора. Обмотка короткозамкнутого ротора выполняется в виде беличьего колеса – цилиндрической клетки из медных или алюминиевых стержней, которые без изоляции закладываются в пазы ротора. Торцовые концы стержней замыкают накоротко с обеих сторон ротора кольцами.
Принцип действия АД заключается в следующем: при питании обмотки статора от сети трёхфазный ток статора создаёт вращающееся магнитное поле, пронизывающее сердечник статора, ротор и воздушный зазор. Вращающееся магнитное поле пересекает проводники ротора и наводит в них ЭДС, под действием которых в проводниках ротора возникают токи. Взаимодействие токов ротора с вращающимся магнитным полем создаёт вращающий момент М, под действием которого ротор вращается.
Для АД выделяют следующие виды характеристик: механические и рабочие. Механической характеристикой называется зависимость частоты вращения ротора от нагрузки. Рабочими характеристиками называют зависимости частоты вращения n, момента на валу М 2 , тока статора I 1 , коэффициента полезного действия ƞ и коэффициента мощности cosφ от полезной мощности P 2 .
79. Режимы работы, механические и рабочие характеристики трёхфазных асинхронных двигателей.
Режимы работы двигателя: продолжительный, кратковременный, повторно-кратковременный.
Механической характеристикой называется зависимость частоты вращения ротора n от момента на валу. От её характера зависит пригодность АД для привода различных механизмов. Рабочими характеристиками называют зависимости частоты вращения n, момента на валу М 2 , тока статора I 1 , коэффициента полезного действия ƞ и коэффициента мощности cosφ от полезной мощности P 2 . Эти характеристики служат для полного выявления свойств самого двигателя. Рабочие характеристики изображены на рисунке.
80. Энергетическая диаграмма и К.П.Д. трёхфазных асинхронных двигателей.
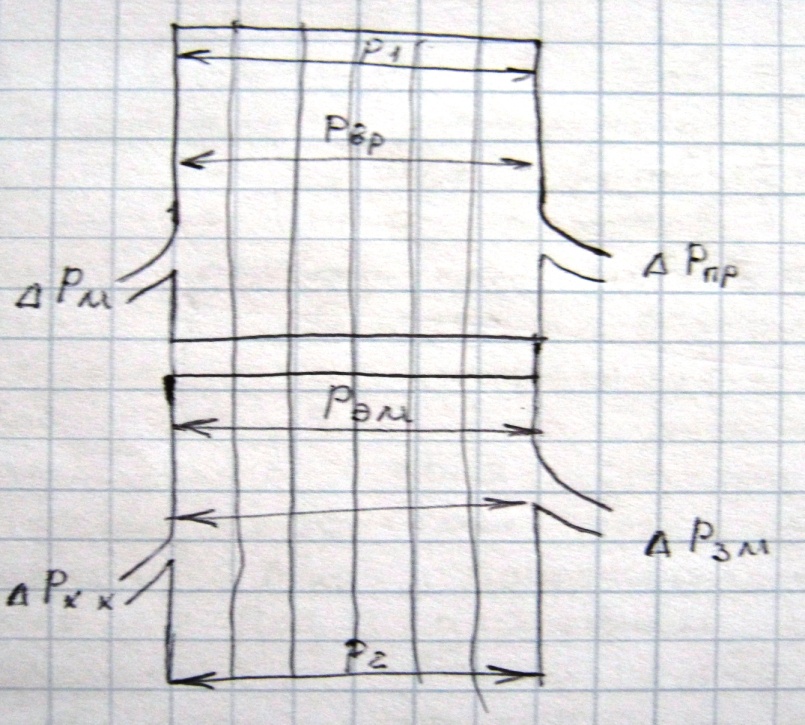 Исходная величина – это мощность Р1 = U1I1cosφ1, подводимая к двигателю из сети 3-х фазного тока. Часть этой мощности ΔРпр1 идёт на нагрев проводников обмотки статора. Остальная мощность Рврп = Р1 - ΔРпр1 преобразуется в мощность вращающегося магнитного поля. Из неё часть мощности ΔРм тратится на потери в магнитопроводе. Эти потери состоят из потерь на гистерезис и потерь на вихревые токи. Потери в сердечнике ротора практической роли не играют, т.к. они пропорциональны f2, а f2 очень мало. Таким образом, ротору через воздушный зазор передаются электромагнитная мощность Рэм = Рврм – ΔРм. Механическая мощность, передаваемая ротору Рм = Рэм – ΔРпр2, где ΔРпр2 – это мощность потерь в обмотке ротора и полезная мощность на валу ротора Р2 = Рмех – ΔРмех – ΔРдоб, где ΔРмех – механические потери, ΔРдоб – добавочные потери, создаваемые пульсацией магнитного поля. КПД двигателя η = Р2 / Р1 = Р2 / (Р2 + ΔРс + ΔРэ) , где ΔРс – постоянные потери. ΔРс = ΔРм + ΔРмех. ΔРэ – переменные потери. ΔРэ = ΔРпр1 + ΔРпр2.
Исходная величина – это мощность Р1 = U1I1cosφ1, подводимая к двигателю из сети 3-х фазного тока. Часть этой мощности ΔРпр1 идёт на нагрев проводников обмотки статора. Остальная мощность Рврп = Р1 - ΔРпр1 преобразуется в мощность вращающегося магнитного поля. Из неё часть мощности ΔРм тратится на потери в магнитопроводе. Эти потери состоят из потерь на гистерезис и потерь на вихревые токи. Потери в сердечнике ротора практической роли не играют, т.к. они пропорциональны f2, а f2 очень мало. Таким образом, ротору через воздушный зазор передаются электромагнитная мощность Рэм = Рврм – ΔРм. Механическая мощность, передаваемая ротору Рм = Рэм – ΔРпр2, где ΔРпр2 – это мощность потерь в обмотке ротора и полезная мощность на валу ротора Р2 = Рмех – ΔРмех – ΔРдоб, где ΔРмех – механические потери, ΔРдоб – добавочные потери, создаваемые пульсацией магнитного поля. КПД двигателя η = Р2 / Р1 = Р2 / (Р2 + ΔРс + ΔРэ) , где ΔРс – постоянные потери. ΔРс = ΔРм + ΔРмех. ΔРэ – переменные потери. ΔРэ = ΔРпр1 + ΔРпр2.
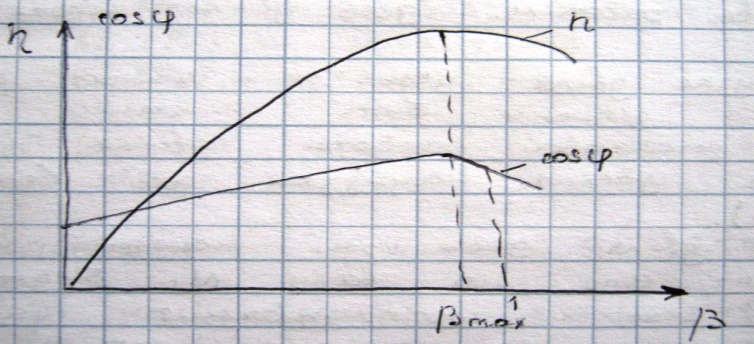
КПД двигателя изменяется в зависимости от нагрузки двигателя. Коэффициент нагрузки β = Р2 / Р2ном. С учётом коэффициента нагрузки η = βР2 / (βР2 + ΔРс + β 2 ΔРэ).
График зависимости КПД от β
 Обычно КПД = 0,75 – 0,95.
Обычно КПД = 0,75 – 0,95.
С ростом нагрузки cosφ = P1 / S1 = P1 / (P1 2 + Q1 2) 0.5 = 1 / (1 + (Q1 2 / P1 2)) растёт, т.к. растёт Р1, а Q1 остаётся постоянной. При дальнейшем росте β растёт поток рассеяния магнитного потока, поэтому растёт Q1, а cosφ уменьшается. АД целесообразно использовать при нагрузках близких к номинальным (β = 1).
вверх 81. Способы регулирования скорости трёхфазных асинхронных двигателей.
Запишем формулу для определения скорости вращения:  .
.
Частоту вращения асинхронного двигателя можно регулировать изменением скольжения , числа пар полюсов и частоты тока питающей сети .
1. Изменения скольжения можно достичь 3 способами:
1.1. изменением подводимого к статору симметричного напряжения U 1 ;
При неизм. моменте на валу двигателя повышение напряжения вызывает повышение частоты вращения двигателя, но диапазон изменения частоты получается небольшим, что обьясняется узкой зоной устойчивой работы двигателя. Кроме того, значит. увеличение напряжения вызывает перегрев двигателя, а снижение напряжения снижает перегрузочную способность  .
.
1.2. нарушением симметрии этого напряжения;
Нарушение симметрии подводимого напряжения осуществляется с помощью автотрансформатора, включённого в одну из фаз. При уменьшении напряжения на входе автотрансформатора напряжение на выходе автотрансформатора несимметрично увеличивается, а частота вращения уменьшается. Недостатками являются уменьшение КПД двигателя и узкая зона регулирования. Применяется для АД небольшой мощности.
1.3. изменением активного сопротивления цепи ротора.
Применяется для АД с фазным ротором.
2. Регулирование частоты вращения изменением частоты тока питающей сети (частотное регулирование).
Для этого необходимы источники питания с регулируемой частотой тока, в качестве которых применяются полупроводниковые и электромагнитные преобразователи частоты. Но с изменением частоты тока изменяется и электромагнитный момент двигателя, поэтому для сохранения момента, коэффициента мощности и КПД двигателя необходимо одновременно изменять и напряжение сети. Если регулирование производится при условии постоянной нагрузки, то напряжение нужно изменять пропорционально частоте. Частотное регулирование позволяет плавно изменять скорость вращения в широком диапазоне.
3. Изменение частоты вращения путём изменения числа пар полюсов.
Этот способ применяется лишь для АД с короткозамкнутым ротором и даёт лишь ступенчатое регулирование частоты. Изменение числа пар полюсов производиться двумя способами:
1) в пазы статора укладываются две обмотки с разным числом пар полюсов, не связанных электрически между собой. Включая разные обмотки в сеть, получают разные частоты вращения. Недостатками метода являются: увеличение габаритов и массы АД;
2) в пазах статора размещена одна обмотка, схема которой путём переключения позволяет уменьшить число пар полюсов, например, обмотка фазы состоит из двух катушек, при их последовательном соединении =2, а при параллельном =1. Начала и концы обмоток выводят на клеммы щитка, поэтому переключение может производиться при работающем двигателе.
82. Схемы управления трёхфазными асинхронными двигателями.
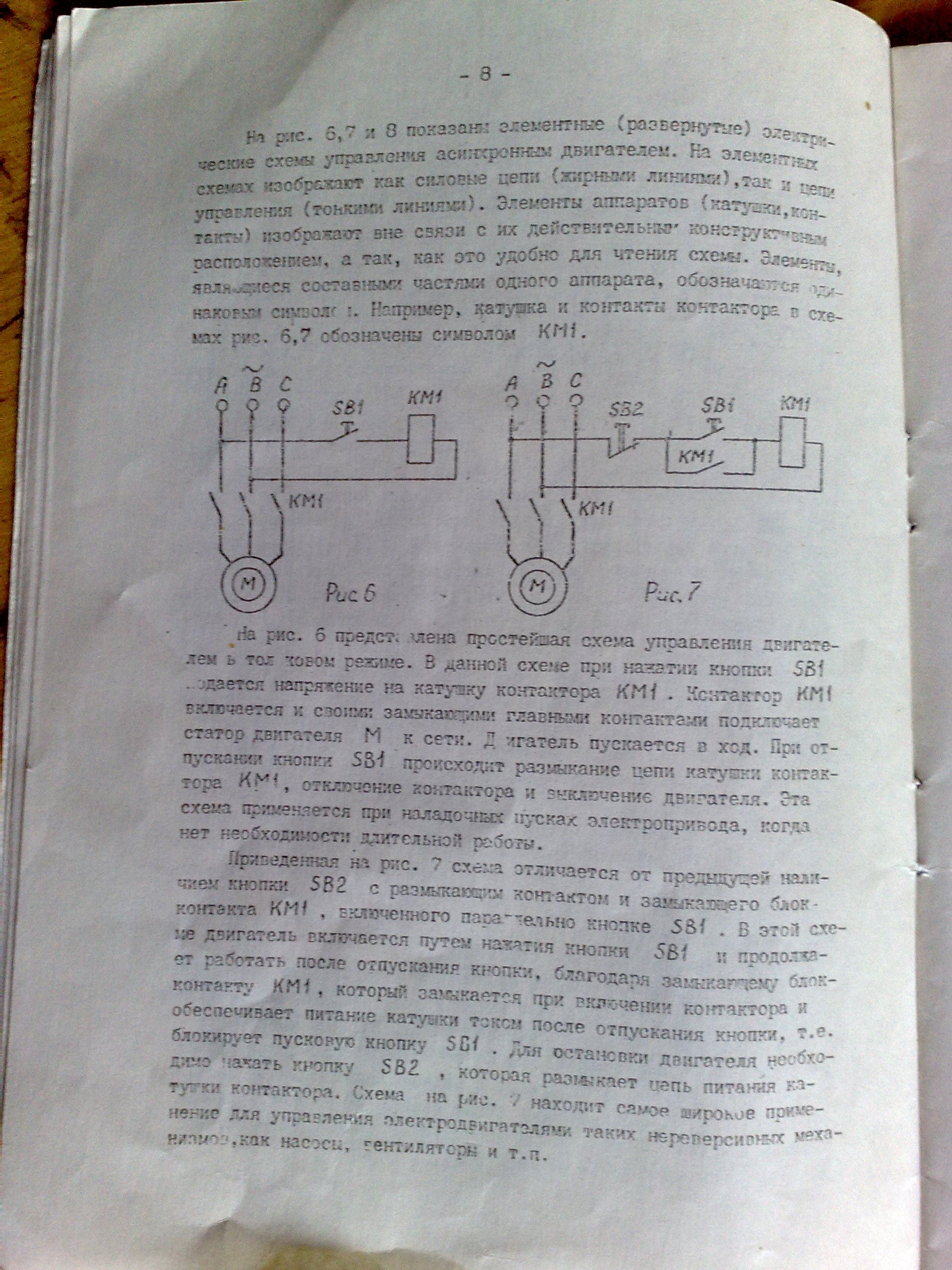 Простейшая схема управления двигателем. В данной схеме при нажатии кнопки SB1 подаётся напряжение на катушку контактора KM1. Контактор KM1 включается и своими замыкающими главными контактами подключает статор двигателя M к сети. Двигатель пускается в ход. При отпускании кнопки SB1 происходит размыкание цепи катушки контактора KM1, отключение контактора и выключение двигателя. Эта схема применяется при наладочных пусках электропривода, когда нет необходимости длительной работы.
Простейшая схема управления двигателем. В данной схеме при нажатии кнопки SB1 подаётся напряжение на катушку контактора KM1. Контактор KM1 включается и своими замыкающими главными контактами подключает статор двигателя M к сети. Двигатель пускается в ход. При отпускании кнопки SB1 происходит размыкание цепи катушки контактора KM1, отключение контактора и выключение двигателя. Эта схема применяется при наладочных пусках электропривода, когда нет необходимости длительной работы.
В этой схеме двигатель включается путём нажатия кнопки SB1 и продолжает работать после отпускания кнопки, благодаря замыкающему блок-контакту KM1, который замыкается при включении контактора и обеспечивает питание катушки током после отпускания кнопки, т.е. блокирует пусковую кнопку SB1. Для остановки двигателя необходимо нажать кнопку SB2, которая размыкает цепь питания катушки контактора. Эта схема находит самое широкое применение для управления электродвигателями таких нереверсивных механизмов, как насосы, вентиляторы и т.д.
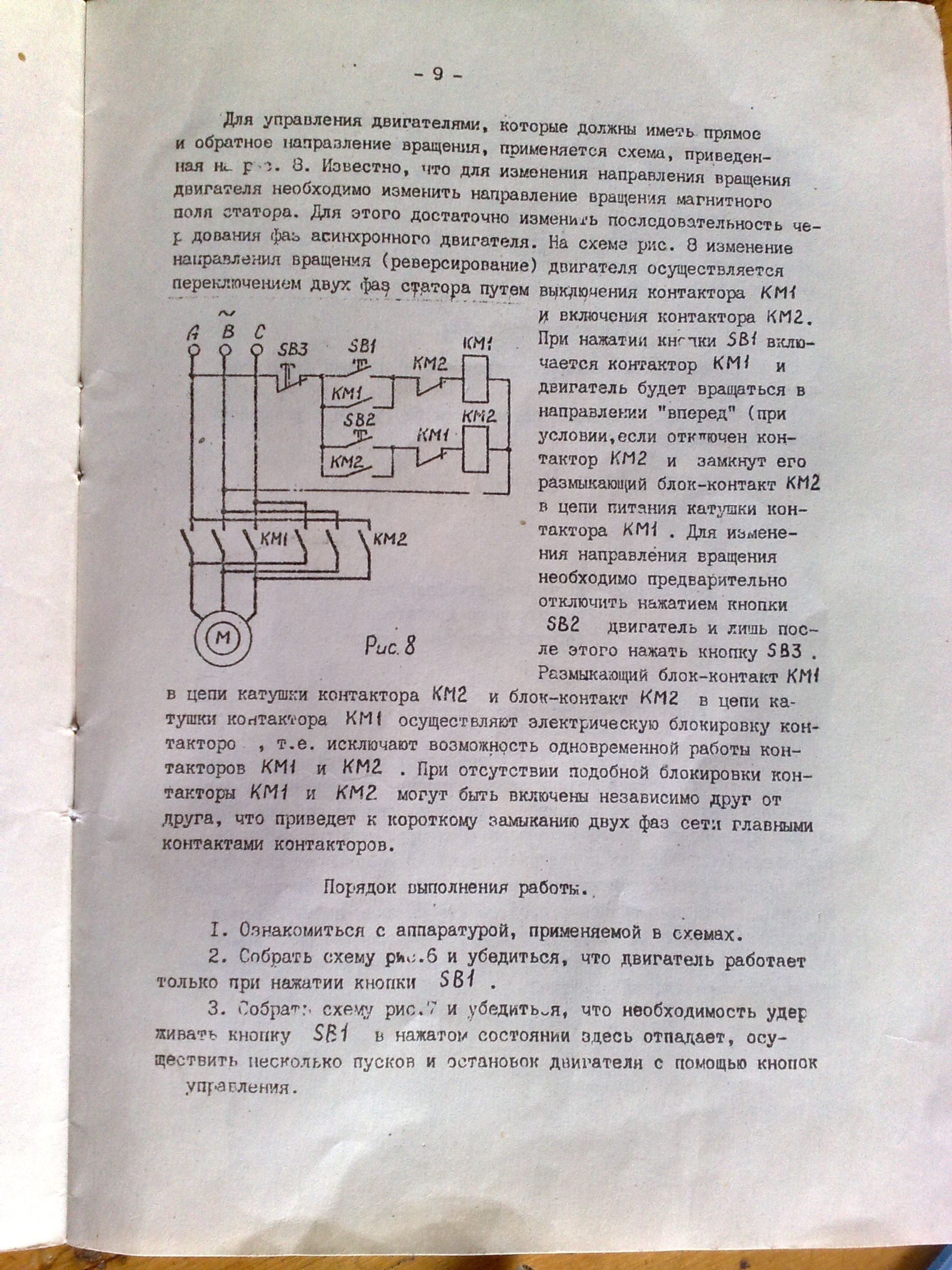 Данная схема применяется для управления двигателями, которые должны иметь прямое и обратное направление вращения ротора. В этой схеме изменение направления вращения двигателя осуществляется переключением двух фаз статора путём выключения контактора KM1 и включения контактора КМ2. При нажатии кнопки SB1 включается контактор KM1 и двигатель будет вращаться в направлении «вперёд» (при условии, если контактор KM2 отключён и замкнут его размыкающий блок-контакт KM2 в цепи питания катушки контактора KM1). Для изменения направления вращения необходимо предварительно отключить нажатием кнопки SB2 двигатель и лишь после этого нажать кнопку SB3. Размыкающий блок-контакт КМ1 в цепи катушки контактора КМ2 и блок-контакт КМ2 в цепи катушки контактора КМ1 осуществляют электрическую блокировку контакторов, т.е. исключают возможность одновременной работы контакторов КМ1 и КМ2. При отсутствии данной блокировки контакторы КМ1 и КМ2 могут быть включены независимо друг от друга, что приведёт к короткому замыканию двух фаз сети главными контактами.
Данная схема применяется для управления двигателями, которые должны иметь прямое и обратное направление вращения ротора. В этой схеме изменение направления вращения двигателя осуществляется переключением двух фаз статора путём выключения контактора KM1 и включения контактора КМ2. При нажатии кнопки SB1 включается контактор KM1 и двигатель будет вращаться в направлении «вперёд» (при условии, если контактор KM2 отключён и замкнут его размыкающий блок-контакт KM2 в цепи питания катушки контактора KM1). Для изменения направления вращения необходимо предварительно отключить нажатием кнопки SB2 двигатель и лишь после этого нажать кнопку SB3. Размыкающий блок-контакт КМ1 в цепи катушки контактора КМ2 и блок-контакт КМ2 в цепи катушки контактора КМ1 осуществляют электрическую блокировку контакторов, т.е. исключают возможность одновременной работы контакторов КМ1 и КМ2. При отсутствии данной блокировки контакторы КМ1 и КМ2 могут быть включены независимо друг от друга, что приведёт к короткому замыканию двух фаз сети главными контактами.
Электрические машины, как и другие устройства, также можно классифицировать. Классифицируют электрические машины по назначению, принципу действия и роду тока, мощности, по частоте вращения.
Классификация по назначению
Электрические машины по своему назначению подразделяют на:
- Электромашинные генераторы. Они выполняют преобразовании энергии механической (вращение) в электрическую. Они устанавливаются на электрических станциях, автомобилях, самолетах, тепловозах, передвижных электростанциях, кораблях и в других установках. На приводят в движение мощные паровые турбины, на автомобилях, тепловозах и прочих транспортных средствах – газовые турбины или двигатели внутреннего сгорания. Генераторы очень часто используют в качестве источников питания в различных установках связи, автоматики и измерительной техники и в других системах.
- Электрические двигатели – выполняют функции обратные генератору, а именно, преобразуют электрическую энергию в механическую. Они используются для приведения в движение множества установок в промышленности, сельском хозяйстве, транспорте, в быту, в системах связи. В их активно используют в качестве регулирующих, программирующих и исполнительных органов.
- Электромашинные преобразователи – выполняют преобразования электрических величин. Например, могут преобразовывать постоянный ток в переменный и наоборот, изменять частоту, число фаз и другие функции. В связи с активным внедрением полупроводниковых преобразователей электромашинные преобразователи в новых проектах используют крайне редко (практически никогда), а уже установленные электромашинные преобразователи активно модернизируются полупроводниковыми (тиристорными и транзисторными).
- – осуществляют регулирование коэффициента мощности cos φ, а именно баланса реактивной мощности в сети.
- Электромашинные усилители – используют для объектов большой мощности. Это, своего рода усилители, они усиливают сигналы большой мощности, при этом управление ведется сигналами малой мощности. Роль этих усилителей, как и электромашинных компенсаторов, в современном мире практически сведена на нет из – за применения полупроводниковых усилителей (транзисторных и тиристорных).
- Электромеханические преобразователи сигналов – это, как правило, электрические микромашины (например, сельсины), которые довольно широко используют в системах автоматического управления.
Классификация по роду тока и принципу действия
Как известно, существует два рода электрического тока – переменный и постоянный. Исходя из этого, электрические машины также подразделяют по роду тока на два вида –машины электрические переменного тока и машины электрические постоянного тока.
Электрические машины переменного тока
В свою очередь электрические машины переменного тока делят на:
- Трансформаторы – наиболее широко применимы в сетях электроснабжения для преобразования напряжений (повышение и понижение). Также довольно широко их применяют в выпрямительных установках для согласования напряжений, в устройствах связи, вычислительной техники и автоматики. Часто применяются и для проведения измерений электрических (измерительные трансформаторы), а также для различных функциональных преобразований (трансформаторы вращающиеся).

- Асинхронные электродвигатели – самые распространенные в мире благодаря своей относительной простоте и низкой стоимости. Простота конструкции и высокая надежность позволяет применять их не только в промышленных электроустановках (станки, краны, подъемные машины), но и в бытовых (компрессора холодильников, вентиляторы, пылесосы). Довольно широкое применение получили однофазные и двухфазные асинхронные управляемые электродвигатели, а также сельсины и тахогенераторы асинхронные.

- Синхронные электродвигатели – наиболее часто применяемы в качестве генераторов электрического тока на электрических станциях. Также применимы в качестве генераторов повышенной частоты в различных источниках питания (например, на кораблях, тепловозах, самолетах). Также в электроприводах большой мощности применяют синхронные электродвигатели, которые могут также помимо выполнения полезной работы и также влиять на коэффициент мощности сети cos φ. Относительно электроприводов малой мощности, то там довольно широкое распространение получили реактивные синхронные электродвигатели, шаговые, индукторные, с постоянными магнитами и другие.
- – используют их относительно редко и зачастую только в качестве электродвигателей. Это вызвано сложностью их конструкции, а также в необходимости довольно тщательного ухода за ними. В бытовых электроприборах и устройствах автоматики применяются универсальные коллекторные электродвигатели, способные работать на двух родах тока – постоянном и переменном.
Электрические машины постоянного тока
В недалеком прошлом были они самыми популярными в регулируемом электроприводе из-за простоты управления ими. Они работают практически во всех сферах промышленности и транспорта. Из-за повышенной стоимости и требовательности в обслуживании активно вытесняются частотно-регулируемыми электроприводами переменного тока.
В связи с большим распространением машин постоянного тока также были распространены и генераторы постоянного тока. Они использовались в качестве источников постоянного напряжения для зарядки аккумуляторных батарей, на транспорте (тепловозы, теплоходы и другие), а также в промышленности (). Ввиду развития полупроводниковой техники генераторы постоянного тока постепенно вытесняются из работы и активно заменяются на генераторы переменного тока работающих в паре с полупроводниковым преобразователем.
Также применяются электродвигатели постоянного тока и в системах автоматического управления АСУ в качестве усилителей электромашинных, тахогенераторов и исполнительных электродвигателей.
Электрические микромашины
Микромашины активно применяются в устройствах автоматических. Соответственно их подразделяют на группы:
- Силовые микродвигатели – приводят во вращения механизмы различных автоматических устройств. Например, самопишущие устройства и другие.

- Исполнительные (управляемые) микромашины – выполняют преобразование энергии электрической в механическую, то есть ведут обработку определенных команд из вне.
- Тахогенераторы – преобразуют механическую энергию вращения вала в электрический сигнал напряжения, который пропорционален скорости вращения вала.
- Вращающиеся трансформаторы – на выходе этих трансформаторов устанавливается напряжение, пропорциональное функции углу поворота ротора, например синусу или косинусу данного угла или же самому углу.
- Машины синхронной связи – (магнесины или сельсины) осуществляют синфазный и синхронный поворот или же вращения нескольких осей, не имеющих между собой механической связи.
- Микромашины гироскопических приборов – вращают роторы гироскопов с довольно высокой частотой, а также производят коррекцию их положения.
- Электромашинные усилители и преобразователи.
Машины первых двух групп довольно часто называют силовыми, а электродвигатели третьей – пятой групп информационными.
Классификация по мощности
Также электрические машины классифицируют еще и по мощности. И по мощности их делят на:
- Микромашины – их мощность может варьироваться от нескольких долей ватта до 500 Вт. Они могут производится для двух родов тока — постоянного и переменного. Могут быть рассчитаны как на работу при нормальной (промышленной) частоте 50 Гц, так и при повышенной (от 400 до 2000 Гц).
- Электродвигатели малой мощности – от 0,5 до 10 кВт. Также могут изготавливаться для двух родов тока – постоянного и переменного нормальной и повышенной частоты.
- Электродвигатели средней мощности – от 10 кВт до нескольких сотен ватт.
- Электродвигатели большой мощности – мощность данных машин больше нескольких сотен киловатт. Такие электродвигатели предназначены для работы на постоянном и переменном напряжении нормальной частоты. Исключение могут составлять электродвигатели специального назначения (авиация, флот) и другие.

Классификация по частоте вращения
Условно их разделяют на:
- До 300 об/мин — тихоходные.
- От 300 до 1500 об/мин — средней быстроходности.
- От 1500 до 6000 об/мин — быстроходные.
- Более 6000 об/мин — сверхбыстроходные.
Микромашины же могут изготавливать с частотой вращения вала от нескольких оборотов в минуту до 60 000 оборотов в минуту. Скорость вращения машин средней и большой мощности, как правило, не превышает 3000 об/мин.
Машины переменного тока бывают двух видов. Это синхронные машины и асинхронные. У синхронных машин скорость вращения ротора строго зависит от частоты переменного тока. Можно сказать скорость вращения "синхронна" с частотой тока. Не трудно догадаться, что у асинхронных машин частота вращения в общем случае зависит от нагрузки на валу, а не от частоты питающего тока.
Кроме деления на синхронные и асинхронные электрические машины еще делятся по назначению. Это могут быть генераторы. То есть такая машина, которая преобразует механическую энергию вращения в переменный электрический ток. Машина, которая преобразует электрическую энергию в механическую называется двигателем. Также существует еще один класс электрических машин. Они преобразуют электрическую энергию, тоже в электрическую, но другой частоты или напряжения.
Синхронной машиной переменного тока называют такую машину, в которой: основное магнитное поле то есть поле статора создается постоянным током. В частном случае это может быть даже постоянный магнит. А вращение ротора происходит с частотой изменения тока.
Формула 1 — зависимость частоты вращения ротора синхронной машины от частоты переменного тока.
где n это частота, с которой вращается ротор, измеряется в оборотах в минуту. То есть, сколько полных оборотов совершит ротор за одну минуту.
f частота питающего переменного тока
p количество пар полюсов у магнитной системы машины
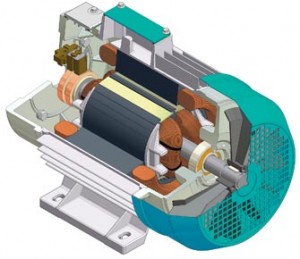
Рисунок 1 — Синхронная машина в разрезе
Синхронные машины по большей части применяются в качестве электродвигателей и генераторов переменного тока. Преобразователи частоты из них, как правило, не делают. Основным достоинством синхронной электрической машины является то, что в ней легко регулировать скорость вращения вала. Поэтому их часто применяют в системах автоматики.
Асинхронная машина это машина, в которой основное магнитное поле статора создаётся переменным электрическим током. А скорость вращения вала не связана жёсткой зависимостью с частотой питающего тока. Асинхронные машины делятся на коллекторные и без коллекторные. Коллекторные машины применяются крайне редко так как они более дороги в производстве, а надежность их ниже. Асинхронные электрические машины чаще всего используются в качестве электродвигателей.
Рисунок 2 — Пример асинхронной электрической машины
Любая машина хоть синхронная хоть асинхронная способна работать в обоих режимах. То есть как электродвигатель, так и генератор переменного тока.
Машины переменного тока по устройству немного отличаются от машин постоянного тока. Каждая машина состоит из двух основных частей: неподвижной части, называемой статором, и вращающейся части, называемой ротором. В отличие от машин постоянного тока у машин переменного тока на статоре укладывают обмотку якоря, а на роторе - обмотку возбуждения. Вместо коллектора на роторе имеются изолированные кольца, по которым ток проводится в обмотку возбуждения. Машины переменного тока бывают синхронные и асинхронные.
Си н х р о н н ы м и называются такие машины переменного тока, частота вращения которых определяется частотой тока. С изменением частоты тока у таких машин одновременно (синхронно) меняется частота вращения. Как правило, у синхронных машин по обмотке возбуждения проходит постоянный ток от постороннего источника. Синхронные машины обратимы, т. е. могут работать в качестве генераторов и электродвигателей. Конструкция синхронного двигателя почти не отличается от конструкции синхронного генератора.
Так как на судах морского флота цепи переменного тока питаются от трехфазных синхронных генераторов, то остановимся на их устройстве и принципе работы.
Обмотка якоря трехфазного синхронного генератора располагается в статоре и состоит из трех отдельных обмоток-фаз, сдвинутых относительно друг друга на 120°С (1/3 периода) с таким расчетом, чтобы индуктируемая э. д. с. в каждой фазе достигала своего максимума спустя 1/3 периода после максимума э. д. с. соседней фазы. Обмотку возбуждения укладывают на роторе, и источником питания для нее может быть небольшой генератор постоянного тока (возбудитель), смонтированный па одном валу с синхронным генератором, или даже аккумуляторная батарея.
Обмотки статора соединяются между собой звездой или треугольником, при этом во внешнюю цепь от обмотки статора отходят три провода (три контакта). На рис. 167 даны схема и продольный разрез синхронного генератора трехфазного переменного тока с возбудителем.
Обмотки статора соединяются между собой звездой или треугольником, при этом во внешнюю цепь от обмотки статора отходят три провода (три контакта). На рис. 167 даны схема и продольный разрез синхронного генератора трехфазного.переменного тока с возбудителем.
Ротор состоит из сердечников полюсов 1, катушки обмотки возбуждения 2, питаемой постоянным током через контактные кольца 5. Статор состоит из активной стали якоря 3, служащей магиитопроводом, и станины 6, служащей для крепления стали якоря и установки машины на фундамент. Активная сталь якоря набирается из листов специальной стали толщиной 0,5 или 0,35 мм. Листы изолируются с обеих сторон специальным лаком. Обмотка 4 укладывается в пазах, выштампованных в стали статора.
На рис. 168, а показано размещение трехфазной обмотки статора (на одной четвертой его части), а на схемах б и в - соединение обмотки статора в треугольник и в звезду.
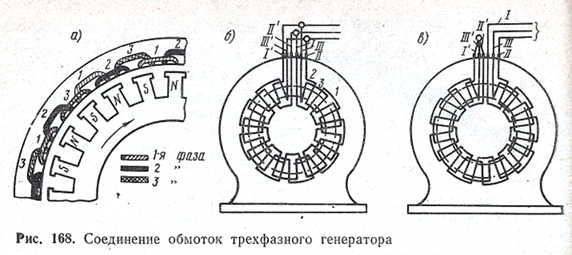
При соединении в треугольник начало первой фазы I соединяется с концом II, начало II - с концом III и, наконец, начало III - с концом I.При соединении обмоток статора звездой концы всех фаз соединяются в одну точку, называемую нулевой, а начала всех фаз остаются свободными, и к ним присоединяется внешняя цепь, в которую подается вырабатываемая генератором электрическая энергия.
Синхронные трехфазные генераторы являются в настоящее время основными источниками электрической энергии как на береговых, так и на судовых электрических станциях любой мощности.
В настоящее время на морских судах получили широкое распространение синхронные генераторы, у которых обмотка возбуждения питается током статора, предварительно выпрямленным с помощью выпрямителей. Схема возбуждения этих машин обеспечивает такое изменение тока возбуждения, при котором напряжение на выводах генератора поддерживается практически постоянным. Такие генераторы называются синхронными генераторами с самовозбуждением и саморегулированием напряжения.
Конструкция синхронного двигателя принципиально не отличается от конструкции синхронного генератора. Для того чтобы синхронный генератор заставить работать в режиме двигателя, нужно отключить первичный двигатель и к обмоткам фаз статора подвести трехфазный ток из цепи. В этом случае генератор станет синхронным электродвигателем, потребляющим ток. Проходя по обмоткам фаз, переменный трехфазный ток создает вращающееся магнитное поле, которое, взаимодействуя с электромагнитом ротора, увлекает его в сторону своего вращения. В результате ротор будет вращаться с такой же частотой, как и вращающееся магнитное поле, при этом он не остановится, даже если дать ему нагрузку, соединив с каким-нибудь механизмом. В этом и заключается сущность работы синхронного электродвигателя.
Регулирование частоты вращения ротора синхронного двигателя производится изменением частоты тока цепи, а изменение направления вращения ротора - переключением двух любых фаз, Т. е. взаимным пересоединением двух питающих проводов. К недостаткам синхронных двигателей относится то, что при пуске их приходится разворачивать посторонним механизмом до частоты вращения, обеспечивающей вращающееся магнитное поле статора.
Для устранения этого недостатка применяют асинхронный пуск синхронных электродвигателей, который заключается в том, что при пуске через специальные обмотки ротора перепускают переменный ток от цепи.
























