بمقدار عزم الدوران محرك غير متزامنإن تحول الطور بين التيار I 2 و e له تأثير كبير. د.س. الدوار E2S.
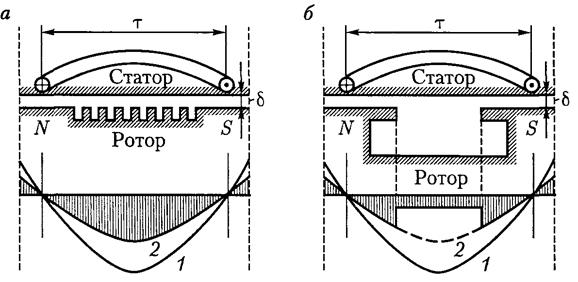
دعونا نفكر في الحالة التي يكون فيها محاثة ملف الدوار صغيرة وبالتالي يمكن إهمال تحول الطور (الشكل 223، أ).
يتم هنا استبدال المجال المغناطيسي الدوار للجزء الثابت بمجال القطبين N وS، اللذين يدوران، في اتجاه عقارب الساعة. باستخدام القاعدة اليد اليمنى، تحديد اتجاه e. د.س. والتيارات في لف الدوار. تتفاعل التيارات الدوارة مع المجال المغناطيسي الدوار، مما يخلق عزم الدوران. يتم تحديد اتجاهات القوى المؤثرة على الموصلات الحاملة للتيار من خلال قاعدة اليد اليسرى. كما يتبين من الرسم، فإن الجزء المتحرك تحت تأثير القوى سوف يدور في نفس اتجاه المجال الدوار نفسه، أي في اتجاه عقارب الساعة.
لنفكر في الحالة الثانية، عندما يكون محاثة ملف الدوار كبيرة. في هذه الحالة، تحول الطور بين تيار الدوار I 2 وe. د.س. سيكون الدوار E 2S كبيرًا أيضًا. في التين. 223، ب، لا يزال المجال المغناطيسي للجزء الثابت للمحرك غير المتزامن يظهر في شكل قطبين N وS يدوران في اتجاه عقارب الساعة. د.س. يبقى كما هو في الشكل 223، أ، ولكن بسبب تأخر الطور للتيار، المحور حقل مغناطيسيلن يتزامن الجزء المتحرك مع خط المجال المحايد للجزء الثابت، ولكنه سيتحرك بزاوية معينة مقابل دوران المجال المغناطيسي. سيؤدي هذا إلى حقيقة أنه، إلى جانب تكوين عزم الدوران الموجه في اتجاه واحد، ستنشئ بعض الموصلات عزم دوران مضادًا.
من هذا يمكن أن نرى أن عزم الدوران الكلي للمحرك مع تحول الطور بين التيار و e. د.س. يكون الدوار أصغر مما هو عليه في الحالة عندما يكون I 2 وE 2S في الطور. يمكن إثبات أن عزم دوران المحرك غير المتزامن يتم تحديده فقط من خلال المكون النشط للتيار الدوار، أي التيار I 2 cos وأنه يمكن حسابه باستخدام الصيغة:
Ф m - التدفق المغناطيسي للجزء الثابت (وأيضًا يساوي تقريبًا التدفق المغناطيسي الناتج للمحرك غير المتزامن) ؛
زاوية تحول الطور بين e. د.س. ومرحلة اللف الحالية
C هو معامل ثابت.
بعد الاستبدال:

من التعبير الأخير يمكن ملاحظة أن عزم دوران المحرك غير المتزامن يعتمد على الانزلاق.
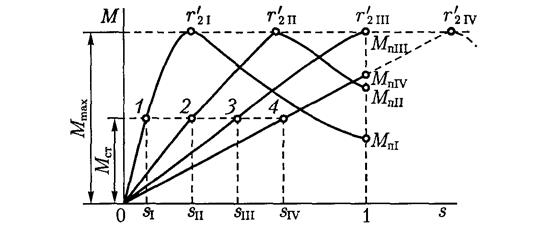
في التين. يوضح الشكل 224 المنحنى A لاعتماد عزم دوران المحرك على الانزلاق. ويتضح من المنحنى أنه في لحظة البدء، عندما تكون s=l و n = 0، يكون عزم المحرك صغيراً. ويفسر ذلك حقيقة أنه في لحظة بدء التشغيل، يكون تردد التيار في الملف الدوار هو الأعلى وتكون المفاعلة التحريضية للملف عالية. ونتيجة لذلك، فإن قيمة cos صغيرة (بواسطة
|
الصف 0.1-0.2). لذلك، على الرغم من الحجم الكبير بدءا الحاليسيكون عزم الدوران صغيرًا.
عند بعض الانزلاق S 1، سيكون لعزم دوران المحرك قيمة قصوى. مع انخفاض إضافي في الانزلاق، أو بمعنى آخر، مع زيادة أخرى في سرعة دوران المحرك، سينخفض عزم الدوران بسرعة.
عندما تكون قيمة الانزلاق s = 0، فإن عزم الدوران للمحرك سيكون أيضًا صفرًا.
تجدر الإشارة إلى أن المحرك غير المتزامن لا يمكن أن يكون انزلاقه صفرًا. وهذا ممكن فقط إذا تم تزويد الجزء المتحرك بعزم دوران خارجي في اتجاه دوران مجال الجزء الثابت.
ابتداء من عزم الدورانيمكن زيادتها إذا تم تقليل تحول الطور بين التيار و e في لحظة البدء. د.س. الدوار. من الصيغة
يمكن أن نرى أنه إذا زادت المقاومة النشطة مع المقاومة الحثية المستمرة للملف الدوار ، فسوف تنخفض الزاوية نفسها ، مما سيؤدي إلى زيادة عزم دوران المحرك. يتم استخدام هذا عمليًا لزيادة عزم دوران المحرك. في لحظة البدء، يتم إدخال مقاومة نشطة (مقاومة متغيرة) في دائرة الدوار، والتي تتم إزالتها بعد ذلك بمجرد زيادة سرعة المحرك.
تؤدي الزيادة في عزم الدوران إلى حقيقة أن الحد الأقصى لعزم دوران المحرك يتم الحصول عليه بانزلاق أكبر (النقطة S 2 من المنحنى B في الشكل 224). من خلال زيادة المقاومة النشطة لدائرة الجزء الدوار عند بدء التشغيل، من الممكن التأكد من أن الحد الأقصى لعزم الدوران سيكون عند لحظة بدء التشغيل (s = 1 منحنى C).
يتناسب عزم دوران المحرك غير المتزامن مع مربع الجهد، لذلك حتى الانخفاض الطفيف في الجهد يكون مصحوبًا بانخفاض حاد في عزم الدوران.
الطاقة P 1 المقدمة للملف الثابت لمحرك غير متزامن تساوي:
![]()
حيث m 1 هو عدد المراحل.
يحتوي الجزء الثابت للمحرك على خسائر الطاقة التالية:
1) في الجزء الثابت من الملف R es. =م 1 أنا 1 2 ص 1 ;
2) يوجد في الفولاذ الثابت تيارات تباطؤ وإيدي Р C .
الطاقة التي يتم توفيرها للدوار هي قوة المجال المغناطيسي الدوار، وتسمى أيضًا الطاقة الكهرومغناطيسية P eM.
الطاقة الكهرومغناطيسية تساوي الفرق بين الطاقة الموردة للمحرك والخسائر في الجزء الثابت للمحرك، أي.
|

الفرق بين R eM ويمثل الخسائر الكهربائية في لف الدوار R eP ، إذا أهملنا الخسائر في فولاذ الدوار بسبب عدم أهميتها (عادةً ما يكون تردد انعكاس مغنطة الدوار صغيرًا جدًا):

ولذلك، فإن الخسائر في ملف الدوار تتناسب مع انزلاق الجزء المتحرك.
إذا قمنا من الطاقة الميكانيكية التي طورها الدوار بطرح الخسائر الميكانيكية P mx الناتجة عن الاحتكاك في محامل الدوار، والاحتكاك بالهواء، وما إلى ذلك، بالإضافة إلى الخسائر الإضافية P D الناشئة تحت الحمل والناجمة عن الحقول الضالة للدوار، والخسائر الناجمة عن: نبضات المجالات المغناطيسية في أسنان الجزء الثابت والدوار، ستكون هناك قوة مفيدة على عمود المحرك، والتي نشير إليها بـ P 2 .
يمكن تحديد كفاءة المحرك غير المتزامن بالصيغة:

يتضح من التعبير الأخير أن عزم الدوران لمحرك غير متزامن يتناسب مع حاصل ضرب قيمة التدفق المغناطيسي الدوار وتيار الدوار وجيب التمام للزاوية الواقعة بين e. د.س. الدوار والتيار الخاص به ،

من الدائرة المكافئة للمحرك غير المتزامن، يتم الحصول على قيمة تيار الجزء الدوار المنخفض، والتي نقدمها دون دليل.
يتأثر حجم عزم دوران المحرك غير المتزامن بشكل كبير بتحول الطور بين التيار I 2 و e. د.س. الدوار E2S.
دعونا نفكر في الحالة التي يكون فيها محاثة ملف الدوار صغيرة وبالتالي يمكن إهمال تحول الطور (الشكل 223، أ).
يتم هنا استبدال المجال المغناطيسي الدوار للجزء الثابت بمجال القطبين N وS، اللذين يدوران، في اتجاه عقارب الساعة. باستخدام قاعدة اليد اليمنى، نحدد اتجاه e. د.س. والتيارات في لف الدوار. تتفاعل التيارات الدوارة مع المجال المغناطيسي الدوار، مما يخلق عزم الدوران. يتم تحديد اتجاهات القوى المؤثرة على الموصلات الحاملة للتيار من خلال قاعدة اليد اليسرى. كما يتبين من الرسم، فإن الجزء المتحرك تحت تأثير القوى سوف يدور في نفس اتجاه المجال الدوار نفسه، أي في اتجاه عقارب الساعة.
لنفكر في الحالة الثانية، عندما يكون محاثة ملف الدوار كبيرة. في هذه الحالة، تحول الطور بين تيار الدوار I 2 وe. د.س. سيكون الدوار E 2S كبيرًا أيضًا. في التين. 223، ب، لا يزال المجال المغناطيسي للجزء الثابت للمحرك غير المتزامن يظهر في شكل قطبين N وS يدوران في اتجاه عقارب الساعة. د.س. يبقى كما هو في الشكل 223، أ، ولكن بسبب تأخر الطور للتيار، لن يتزامن محور المجال المغناطيسي الدوار مع الخط المحايد لحقل الجزء الثابت، ولكنه سيتحول بزاوية معينة مقابل دوران المجال المغناطيسي. سيؤدي هذا إلى حقيقة أنه، إلى جانب تكوين عزم الدوران الموجه في اتجاه واحد، ستنشئ بعض الموصلات عزم دوران مضادًا.
من هذا يمكن أن نرى أن عزم الدوران الكلي للمحرك مع تحول الطور بين التيار و e. د.س. يكون الدوار أصغر مما هو عليه في الحالة عندما يكون I 2 وE 2S في الطور. يمكن إثبات أن عزم دوران المحرك غير المتزامن يتم تحديده فقط من خلال المكون النشط للتيار الدوار، أي التيار I 2 cos وأنه يمكن حسابه باستخدام الصيغة:
Ф m - التدفق المغناطيسي للجزء الثابت (وأيضًا يساوي تقريبًا التدفق المغناطيسي الناتج للمحرك غير المتزامن) ؛
زاوية تحول الطور بين e. د.س. ومرحلة اللف الحالية
C هو معامل ثابت.
بعد الاستبدال:
من التعبير الأخير يمكن ملاحظة أن عزم دوران المحرك غير المتزامن يعتمد على الانزلاق.
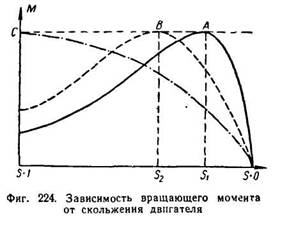
في التين. يوضح الشكل 224 المنحنى A لاعتماد عزم دوران المحرك على الانزلاق. ويتضح من المنحنى أنه في لحظة البدء، عندما تكون s=l و n = 0، يكون عزم المحرك صغيراً. ويفسر ذلك حقيقة أنه في لحظة بدء التشغيل، يكون تردد التيار في الملف الدوار هو الأعلى وتكون المفاعلة التحريضية للملف عالية. ونتيجة لذلك، فإن قيمة cos صغيرة (بواسطة
|
الصف 0.1-0.2). ولذلك، على الرغم من تيار البداية الكبير، فإن عزم الدوران سيكون صغيرا.
عند بعض الانزلاق S 1، سيكون لعزم دوران المحرك قيمة قصوى. مع انخفاض إضافي في الانزلاق، أو بمعنى آخر، مع زيادة أخرى في سرعة دوران المحرك، سينخفض عزم الدوران بسرعة.
عندما تكون قيمة الانزلاق s = 0، فإن عزم الدوران للمحرك سيكون أيضًا صفرًا.
تجدر الإشارة إلى أن المحرك غير المتزامن لا يمكن أن يكون انزلاقه صفرًا. وهذا ممكن فقط إذا تم تزويد الجزء المتحرك بعزم دوران خارجي في اتجاه دوران مجال الجزء الثابت.
يمكن زيادة عزم الدوران في البداية إذا تم تقليل تحول الطور بين التيار والبريد في لحظة البدء. د.س. الدوار. من الصيغة
يمكن أن نرى أنه إذا زادت المقاومة النشطة مع المقاومة الحثية المستمرة للملف الدوار ، فسوف تنخفض الزاوية نفسها ، مما سيؤدي إلى زيادة عزم دوران المحرك. يتم استخدام هذا عمليًا لزيادة عزم دوران المحرك. في لحظة البدء، يتم إدخال مقاومة نشطة (مقاومة متغيرة) في دائرة الدوار، والتي تتم إزالتها بعد ذلك بمجرد زيادة سرعة المحرك.
تؤدي الزيادة في عزم الدوران إلى حقيقة أن الحد الأقصى لعزم دوران المحرك يتم الحصول عليه بانزلاق أكبر (النقطة S 2 من المنحنى B في الشكل 224). من خلال زيادة المقاومة النشطة لدائرة الجزء الدوار عند بدء التشغيل، من الممكن التأكد من أن الحد الأقصى لعزم الدوران سيكون عند لحظة بدء التشغيل (s = 1 منحنى C).
يتناسب عزم دوران المحرك غير المتزامن مع مربع الجهد، لذلك حتى الانخفاض الطفيف في الجهد يكون مصحوبًا بانخفاض حاد في عزم الدوران.
الطاقة P 1 المقدمة للملف الثابت لمحرك غير متزامن تساوي:
![]()
حيث m 1 هو عدد المراحل.
يحتوي الجزء الثابت للمحرك على خسائر الطاقة التالية:
1) في الجزء الثابت من الملف R es. =م 1 أنا 1 2 ص 1 ;
2) يوجد في الفولاذ الثابت تيارات تباطؤ وإيدي Р C .
الطاقة التي يتم توفيرها للدوار هي قوة المجال المغناطيسي الدوار، وتسمى أيضًا الطاقة الكهرومغناطيسية P eM.
الطاقة الكهرومغناطيسية تساوي الفرق بين الطاقة الموردة للمحرك والخسائر في الجزء الثابت للمحرك، أي.
|
الفرق بين R eM ويمثل الخسائر الكهربائية في لف الدوار R eP ، إذا أهملنا الخسائر في فولاذ الدوار بسبب عدم أهميتها (عادةً ما يكون تردد انعكاس مغنطة الدوار صغيرًا جدًا):
ولذلك، فإن الخسائر في ملف الدوار تتناسب مع انزلاق الجزء المتحرك.
إذا قمنا من الطاقة الميكانيكية التي طورها الدوار بطرح الخسائر الميكانيكية P mx الناتجة عن الاحتكاك في محامل الدوار، والاحتكاك بالهواء، وما إلى ذلك، بالإضافة إلى الخسائر الإضافية P D الناشئة تحت الحمل والناجمة عن الحقول الضالة للدوار، والخسائر الناجمة عن: نبضات المجالات المغناطيسية في أسنان الجزء الثابت والدوار، ستكون هناك قوة مفيدة على عمود المحرك، والتي نشير إليها بـ P 2 .
يمكن تحديد كفاءة المحرك غير المتزامن بالصيغة:
يتضح من التعبير الأخير أن عزم الدوران لمحرك غير متزامن يتناسب مع حاصل ضرب قيمة التدفق المغناطيسي الدوار وتيار الدوار وجيب التمام للزاوية الواقعة بين e. د.س. الدوار والتيار الخاص به ،
من الدائرة المكافئة للمحرك غير المتزامن، يتم الحصول على قيمة تيار الجزء الدوار المنخفض، والتي نقدمها دون دليل.
![]()
يسمى الاعتماد المعبر عنه بيانياً لعزم الدوران الكهرومغناطيسي على الانزلاق الخصائص الميكانيكيةمحرك غير متزامن (الشكل 3.3).
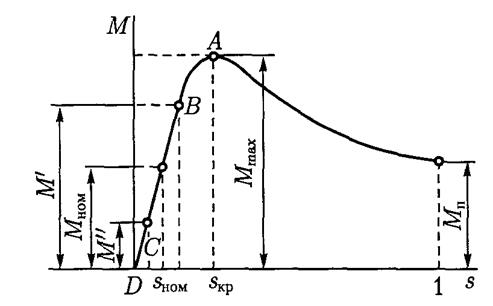
أرز. 3.3. الخصائص الميكانيكية للمحرك غير المتزامن
يمكن استخدام صيغة مبسطة لحساب عزم الدوران الكهرومغناطيسي لمحرك غير متزامن (صيغة كلوس) لبناء الخصائص الميكانيكية
في هذه الحالة، يتم تحديد الانزلاق الحرج بواسطة الصيغة
![]()
حيث μ m = M max / M nom - سعة التحميل الزائد للمحرك.
عند حساب الخصائص الميكانيكية، ينبغي أن يؤخذ في الاعتبار أنه عندما تتجاوز قيم الانزلاق القيمة الحرجة، تنخفض دقة الحسابات بشكل حاد. يتم تفسير ذلك من خلال التغيير في معلمات الدائرة المكافئة للمحرك غير المتزامن، الناجم عن التشبع المغناطيسي للجزء الثابت وأسنان الدوار، وزيادة في تردد التيار في لف الدوار.
يعتمد شكل الخصائص الميكانيكية للمحرك غير المتزامن إلى حد كبير على الجهد المطبق على ملف الجزء الثابت ش 1 (الشكل 3.4) والمقاومة النشطة للملف الدوار ص" 2 (الشكل 3.5).

أرز. 3.4. تأثير الجهد ش 1 على الخصائص الميكانيكية للمحرك غير المتزامن
عادة لا تحتوي البيانات الواردة في كتالوجات المحركات غير المتزامنة على معلومات حول معلمات الدائرة المكافئة، مما يجعل من الصعب استخدام الصيغ لحساب عزم الدوران الكهرومغناطيسي. ولذلك، لحساب عزم الدوران الكهرومغناطيسي، غالبا ما تستخدم الصيغة
أرز. 3.5. تأثير المقاومة ص" 2 على الخصائص الميكانيكية للمحرك غير المتزامن
يتم تحديد الخصائص التشغيلية للمحرك غير المتزامن من خلال خصائص التشغيل الخاصة به: الاعتماد على سرعة الدوران ن 2، عزم الدوران رمح م 2 - الكفاءة ومعامل القدرة كوسφ 1 من حمولة المحرك ر 2 .
عند حساب المعلمات لتحديد خصائص الأداء أ المحركات المتزامنةاستخدم إما الطريقة الرسومية التي تعتمد على البناء مخطط دائريأو الطريقة التحليلية.
أساس تنفيذ أي من طرق حساب خصائص الأداء هو نتائج التجارب حركة خاملةودائرة كهربائية قصيرة. إذا تم تصميم المحرك، فسيتم الحصول على هذه البيانات أثناء حسابه.
عند حساب مقاومة المقاومات صإضافة، تستخدم في دوائر الجزء الثابت أو الدوار للحد من تيار البدء أو التحكم في سرعة الدوران، استخدم المبدأ: بالنسبة لهذا المحرك غير المتزامن المحدد، الانزلاق سيتناسب مع المقاومة النشطة للدائرة الدوارة لهذا المحرك. وعلى هذا تكون المساواة صحيحة
(ص 2 + صتحويلة) /س= ص 2 / ثالاسم,
أين ص 2- المقاومة النشطة للدوار الذي يلف نفسه عند درجة حرارة التشغيل؛ س-انزلاق عندما يتم إدخال المقاوم في الدائرة الدوارة مع المقاومة صتحويلة.
من هذا التعبير نحصل على صيغة لحساب المقاومة النشطة للمقاومة الإضافية g to6، اللازمة للحصول على انزلاق متزايد معين سعند حمل معين (اسمي):
صتحويلة = ص 2 (ق / ق رقم - 1).
هناك طريقتان لحساب مقاومة متغيرات البداية: رسومية وتحليلية.
طريقة رسوميةأكثر دقة، ولكنها تتطلب بناء خاصية ميكانيكية طبيعية ومخطط انطلاق للمحرك، وهو ما يرتبط بكمية كبيرة من العمل الرسومي.
المنهج التحليلييعد حساب مقاومة متغيرات البداية أبسط ولكنه أقل دقة. ويرجع ذلك إلى حقيقة أن الطريقة تعتمد على افتراض أن قسم العمل الخاص بالخاصية الميكانيكية الطبيعية للمحرك غير المتزامن مستقيم. ولكن عندما يكون الانزلاق قريبًا من المستوى الحرج، فإن هذا الافتراض يسبب خطأً ملحوظًا، وهو أكثر أهمية كلما اقتربت لحظة البداية الأولية م 1 إلى الحد الأقصى لعزم الدوران م م اه. ولذلك، فإن طريقة الحساب التحليلي تنطبق فقط على قيم عزم الدوران الأولي م 1 < 0.7 · م م اه .
مقاومات المقاومات عند مراحل البدء بالمقاومة:
ثالث صتحويلة 3 = ص 2 (μ م - 1)؛
ثانية صتحويلة2 = صتحويلة 3 μ م؛
أولاً صتحويلة 1 = صتحويلة 2 μ م،
أين ص 2 - المقاومة النشطة لملف الطور لدوار المحرك غير المتزامن،
أين ه 2 و أنا 2nom - بيانات الكتالوج لحجم المحرك المحدد.
مقاومة مقاومة متغيرة البداية في مراحلها:
أول ص PR1 = صتحويلة1 + صتحويلة2 + صتحويلة 3؛
الثاني ص PR2 = صتحويلة2 + صتحويلة3
الثالث ص PR2 = صتحويلة 3 .
للحد من تيار البدء للمحركات غير المتزامنة الدوار قفص السنجابيتم استخدام دوائر خاصة لإدراجها مع عناصر تحد من تيار البداية. تعتمد كل هذه الطرق على تقليل الجهد الموفر لملف الجزء الثابت. الدوائر الأكثر استخدامًا هي تلك التي تتضمن مقاومات أو اختناقات في الأسلاك الخطية للجزء الثابت (انظر الشكل 3.14، ب).حساب المقاومة المطلوبة لهذه العناصر لتخفيض معين في تيار البدء a بالنسبة لها المعنى الطبيعييتم تنفيذه وفقًا للصيغ:
للمقاومات ذات المقاومة النشطة
رن = 
للإختناقات
Xل= 
مقاومة المحرك في وضع الدائرة القصيرة ز ك، أوم،
زك = ش 1 /أنا ص
هنا Xإلى و صك - المكونات الاستقرائية والنشطة لهذه المقاومة
رك = ز ك كوسφ ك ; سك =
تقليل عزم الدوران الاصطناعي عند التشغيل ر أو ل سوف يكون
α م = α 2 أنا
الجدول 3.1
وبالتالي، إذا تم إعطاء القيمة α m، التي تحدد قيمة عزم الدوران الاصطناعي M"p، ثم لحساب القيم المقابلة ر ص أو XLيمكنك استخدام الصيغ المذكورة أعلاه عن طريق استبدالها بدلاً من α 2 أنا، القيمة α م.
المقاومة الكهربائيةعادة ما تتوافق ملفات المحرك المدرجة في الكتالوجات مع درجة حرارة +20 درجة مئوية. ولكن عند حساب خصائص ومعلمات المحركات، يجب إحضار مقاومة اللفات إلى درجة حرارة التشغيل. وفقًا للمعيار الحالي، يتم أخذ درجة حرارة التشغيل اعتمادًا على فئة مقاومة الحرارة للعزل الكهربائي المستخدم في المحرك: مع فئة مقاومة الحرارة B، تكون درجة حرارة التشغيل 75 درجة مئوية، ومع فئات مقاومة الحرارة F وH - 115 درجة مئوية. يتم تحويل مقاومة اللف إلى درجة حرارة التشغيل عن طريق ضرب مقاومة اللف عند درجة حرارة 20 درجة مئوية في معامل التسخين k ر:
ص= ص 20 ألف ر.
يتم أخذ قيم هذا المعامل حسب غرض المحركات وأبعادها (ارتفاع محور الدوران) (الجدول 3.1).
آلات متزامنة
مفاهيم أساسية
ميزة مميزةالآلات المتزامنة هي اتصال صارم بين سرعة الدوار ن 1 والتردد التيار المتناوبفي لف الجزء الثابت F 1:
ن 1 = F 1 60/ ر.
بمعنى آخر، يدور المجال المغناطيسي الدوار للجزء الثابت والدوار للآلة المتزامنة بشكل متزامن،أي بنفس التردد.
وفقا لتصميمها، يتم تقسيم الآلات المتزامنة إلى قطب بارز وغير بارز. في الآلات المتزامنة ذات القطب البارز، يكون للعضو الدوار أقطاب بارزة يتم من خلالها لف ملفات المجال، والتي يتم تشغيلها بواسطة العاصمة. السمة المميزة لهذه الآلات هي الفرق في المقاومة المغناطيسية على طول المحور الطولي (على طول محور القطبين) وعلى طول المحور العرضي (على طول المحور الذي يمر في الفضاء بين الأقطاب). المقاومة المغناطيسية لتدفق الجزء الثابت على طول المحور الطولي دمقاومة مغناطيسية أقل بكثير لتدفق الجزء الثابت على طول المحور العرضي ف ف.في الآلات المتزامنة ذات القطب غير البارز، تكون المقاومة المغناطيسية على طول المحورين الطولي والعرضي هي نفسها، نظرًا لأن فجوة الهواء في هذه الآلات حول محيط الجزء الثابت هي نفسها.
لا يختلف تصميم الجزء الثابت للآلة المتزامنة، من حيث المبدأ، عن الجزء الثابت للآلة غير المتزامنة. في ملف الجزء الثابت، أثناء تشغيل الماكينة، يتم تحفيز المجالات الكهرومغناطيسية وتدفق التيارات، مما يخلق قوة دافعة مغناطيسية (MF)، تبلغ قيمتها القصوى
F 1 =0,45م 1 أنا 1 ث 1 ك ريف1 / ر
يخلق هذا MMF مجالًا مغناطيسيًا دوارًا وفي فجوة الهواء δ بواسطة آلة، يتم إنشاء الحث المغناطيسي، ويعتمد الرسم البياني للتوزيع داخل كل قسم قطبي على تصميم الدوار (الشكل 4.1).
بالنسبة لآلة متزامنة ذات قطب بارز، تكون معادلة الجهد صالحة:
Ú 1 =Ė 0 + Ė 1 د + Ė 1 ف + Ė σ1 – İ 1 ص 1
أين Ė 0 - المجالات الكهرومغناطيسية الرئيسية لآلة متزامنة، تتناسب مع التدفق المغناطيسي الرئيسي للآلة المتزامنة F 0 ; Ė 1 د - EMF لتفاعل عضو الإنتاج لآلة متزامنة على طول المحور الطولي، بما يتناسب مع MMF لتفاعل عضو الإنتاج على طول المحور الطولي F 1د؛ Ė σ1 - المجال المغناطيسي لتفاعل عضو الإنتاج على طول المحور العرضي، بما يتناسب مع MMF لتفاعل عضو الإنتاج على طول المحور العرضي F 1 ف؛ Ė σ1 - تسرب emf بسبب وجود تدفق التسرب المغناطيسي F 0، يتناسب حجم هذا المجال الكهرومغناطيسي مع مقاومة التسرب الحثية لملف الجزء الثابت X 1
Ė σ1 = يİ 1 ص
İ 1 ص 1 - انخفاض الجهد النشط في ملف الطور الثابت وعادة ما يتم إهمال هذه القيمة عند حل المشاكل بسبب قيمتها الصغيرة.
أرز. 4.1. الرسوم البيانية لتوزيع الحث المغناطيسي على طول المحور العرضي
قطب غير بارز ( أ) والقطب البارز ( ب)الآلات المتزامنة:
1 - جدول حركة الديمقراطيين الاشتراكيين؛ 2 - الرسم البياني للتدفق المغناطيسي
بالنسبة لآلة متزامنة ذات قطب غير بارز، فإن معادلة الجهد لها الشكل
Ú 1 =Ė 0 + Ė ج – İ 1 ص 1
هنا
Ė ج = Ė 1 + Ė σ1
أين Ė 1 - رد فعل EMF لعضو الإنتاج لآلة متزامنة ذات قطب غير بارز. تتوافق معادلات الإجهاد المذكورة أعلاه مع مخططات متجهات الإجهاد. يجب إنشاء هذه المخططات لتحديد القوة الدافعة الكهربية الرئيسية للجهاز ه 0، أو جهد لف الجزء الثابت ش 1. يجب أن يؤخذ في الاعتبار معادلات الإجهاد وما يقابلها الرسوم البيانية المتجهةولا تأخذ في الاعتبار التشبع المغناطيسي للدائرة المغناطيسية لآلة متزامنة، والذي كما هو معروف يؤثر على قيمة المفاعلات الحثية، مما يؤدي إلى انخفاضها. يمثل المحاسبة عن هذا التشبع مهمة صعبةلذلك، عند حساب المجالات الكهرومغناطيسية والفولتية للأجهزة المتزامنة، يتم استخدامها عادةً مخطط عملي EMF، الذي يأخذ في الاعتبار حالة تشبع النظام المغناطيسي الناتج عن تفاعل عضو الإنتاج عند تحميل الآلة المتزامنة. عند إنشاء مخطط EMF عملي، لا تتحلل القوة الممغنطة لتفاعل عضو الإنتاج إلى مكونات طولية وعرضية، لذلك يمكن استخدام هذا المخطط في حسابات آلات القطب البارز وغير القطبي.
عند حل المشكلات المرتبطة إما بالمولدات المتزامنة المتصلة على التوازي مع الشبكة، أو بالمحركات المتزامنة، يتم استخدام الخصائص الزاويةآلات متزامنة تمثل الاعتماد على عزم الدوران الكهرومغناطيسي م على زاوية الحمل θ. يجب أن نتذكر أنه في الآلات المتزامنة ذات القطب البارز تعمل نقطتان: النقطة الرئيسية م الأساسية ورد الفعل م ص، وفي آلات القطب غير البارزة - النقطة الرئيسية فقط:
![]()
زاوية التحميل θ nom يتوافق مع تصنيف عزم الدوران م الاسم. يحدد الحد الأقصى لعزم الدوران للآلة المتزامنة سعة التحميل الزائد للآلة المتزامنة، وهو أمر مهم لكليهما مولدات متزامنة، تعمل بالتوازي مع الشبكة، وللمحركات المتزامنة. في الآلات المتزامنة ذات القطب غير البارز أقصى عزم دورانيتوافق مع زاوية الحمل θ = 90°، في آلات القطب البارز θ cr< 90° и обычно составляет 60 - 80° в зависимости от соотношения основного и реактивного اللحظات الكهرومغناطيسيةهذه السيارة.
للحساب الزاوية الحرجةالتحميل، الذي يحدد سعة التحميل الزائد للآلات المتزامنة ذات القطب البارز، يمكننا استخدام التعبير.
إن عزم الدوران الذي طوره المحرك يساوي القوة الكهرومغناطيسية مقسومة على سرعة الدوران المتزامن للمحرك الكهربائي.
م = ف م /ω 0
الطاقة الكهرومغناطيسية هي الطاقة المنقولة عبر فجوة الهواء من الجزء الثابت إلى الجزء الدوار، وهي تساوي الخسائر في الجزء الدوار، والتي يتم تحديدها بالصيغة:
P em = m I 2 2 (r 2 '/s)
م – عدد المراحل.
M = M em = (Pm/ω 0) (I 2 ') 2 (r 2 '/s)
السمة الكهروميكانيكية للمحرك غير المتزامن هي اعتماد I2’ على الانزلاق. لكن منذ آلة غير متزامنةيعمل فقط كمحرك كهربائي، السمة الرئيسية هي الخاصية الميكانيكية.
M = Me m = (Pm/ω 0) (I 2 ') 2 (r 2 '/s) - تعبير مبسط للخاصية الميكانيكية.
باستبدال القيمة الحالية في هذا التعبير، نحصل على: M \u003d / [ω 0 [(r 1 + r 2 '/s) 2 + (x 1 + x 2 ') 2 ]]
بدلا من ω 0، تحتاج إلى استبدال السرعة الميكانيكية، ونتيجة لذلك يتم تقليل عدد أزواج القطب.
M \u003d / [ω 0 [(r 1 + r 2 '/s) 2 + (x 1 + x 2 ') 2 ]] هي معادلة الخاصية الميكانيكية للمحرك التعريفي.
عندما ينتقل المحرك التعريفي إلى وضع المولد، تصبح سرعة الدوران ω > ω 0 والانزلاق سالبًا (s). عندما يتغير الانزلاق من 0 إلى +∞، يُسمى الوضع "وضع الفرامل الكهرومغناطيسية".
بتحديد قيم الانزلاق من o إلى +∞ نحصل على الخاصية:
الخصائص الميكانيكية الكاملة للمحرك غير المتزامن.
كما يتبين من الخاصية الميكانيكية، فإن لها حدين متطرفين: أحدهما في مقطع تغير الانزلاق في المنطقة من 0 إلى +∞، والآخر في المقطع من 0 إلى -∞. ديسيمتر / دي إس = 0
M max = / ] + يشير إلى وضع المحرك. - يشير إلى وضع المولد.
M max = M cr M cr – اللحظة الحرجة.
يُطلق على الانزلاق الذي تصل عنده العزم إلى الحد الأقصى الانزلاق الحرج، ويتم تحديده بالصيغة: s cr = ±
الانزلاق الحرج له نفس القيمة في وضعي المحرك والمولد.
يمكن الحصول على قيمة M cr عن طريق استبدال قيمة الانزلاق الحرج في صيغة العزم.
يُطلق على عزم الدوران المنزلق الذي يساوي 1 عزم الدوران البداية. يمكن الحصول على التعبير عن عزم الدوران البداية عن طريق استبدال 1 في الصيغة:
م ع = / [ω 0 [(ص 1 + ص 2 ’) 2 + (س 1 + س 2 ’) 2 ]]
نظرًا لأن المقام في صيغة الحد الأقصى للحظة هو عدة مرات أكبر من U f، فمن المعتاد اعتبار M kr ≡U f 2 .
يعتمد الانزلاق الحرج على قيمة المقاومة النشطة للملف الدوار R 2 '. يعتمد عزم الدوران المبدئي، كما يتبين من الصيغة، على المقاومة النشطة للدوار r 2 '. يتم استخدام خاصية عزم الدوران هذه في المحركات غير المتزامنة مع الدوار الجرح، حيث يتم زيادة عزم الدوران عن طريق إدخال مقاومة نشطة في دائرة الدوار.
7. محول التباطؤ
وضع عدم التحميل للمحول هو وضع التشغيل عندما يتم تغذية أحد ملفات المحولات من مصدر بجهد متناوب وعندما تكون اللفات الأخرى عبارة عن دوائر مفتوحة. يمكن للمحول الحقيقي أن يتمتع بهذا الوضع من التشغيل عندما يكون متصلاً بالشبكة، ولم يتم تشغيل الحمل الذي يتم تغذيته من ملفه الثانوي بعد. يمر التيار I 0 عبر الملف الأولي للمحول، وفي نفس الوقت لا يوجد تيار في الملف الثانوي، لأن دائرته مفتوحة. يؤدي مرور التيار I 0 عبر الملف الأولي إلى إنشاء صينية متغيرة جيبيًا F 0 في الدائرة المغناطيسية، والتي، بسبب الخسائر المغناطيسية، تتأخر في الطور مع التيار بزاوية الخسارة δ. 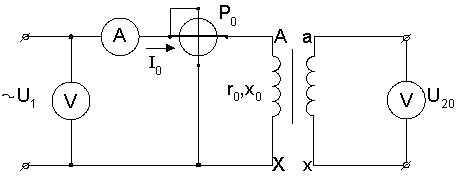














 قنوات البيع للطماطم (البندورة).")









