أعمال الهندسة الكهربائية
"خصائص الأداء محرك غير متزامن"
مقدمة
غير متزامن سيارة كهربائية- هذه سيارة كهربائية التيار المتناوب، حيث لا تساوي سرعة دوران العضو الدوار تردد دوران المجال المغناطيسي للجزء الثابت وتعتمد على الحمل. يتم استخدامه بشكل رئيسي كمحرك وكمولد. يحتوي الجزء الثابت على فتحات يتم فيها وضع ملف أحادي أو متعدد الطور (عادةً ثلاثي الطور)، متصل بشبكة التيار المتردد. تم تصميم هذا الملف لإنشاء مجال مغناطيسي متحرك، دائري دوار للآلات ثلاثية الطور، وبيضاوي نابض أو دوّار للآلات أحادية الطور. تم تصميم الدوار، وهو جزء دوار من الآلة الكهربائية، أيضًا لإنشاء مجال مغناطيسي يؤدي، بالتفاعل مع مجال الجزء الثابت، إلى إنشاء عزم كهرومغناطيسي يحدد اتجاه تحويل الطاقة. في المولدات، تكون هذه اللحظة بمثابة كبح بطبيعتها، مما يعاكس عزم دوران المحرك الأساسي الذي يقود الدوار. على العكس من ذلك، في المحركات، هذه اللحظة هي اللحظة الدافعة، التي تتغلب على مقاومة الآلية المدفوعة بالدوار.
المولد غير المتزامن عبارة عن آلة كهربائية غير متزامنة تعمل في وضع المولد. مصدر مساعد التيار الكهربائيطاقة منخفضة وجهاز فرامل (في محرك كهربائي).
المحرك الكهربائي غير المتزامن هو آلة كهربائية غير متزامنة تعمل في وضع المحرك. الأكثر شيوعًا هو المحرك الكهربائي غير المتزامن ثلاثي الطور (الذي اخترعه M. O. Dolivo-Dobrovolsky في عام 1889). المحركات الكهربائية غير المتزامنةوتتميز بالبساطة النسبية في التصميم والموثوقية في التشغيل، ولكن لها نطاق سرعة دوران محدود وعامل طاقة منخفض عند الأحمال المنخفضة. الطاقة من أجزاء من W إلى عشرات MW.
1. محرك غير متزامن
1.1 تردد دوران المجال المغناطيسي والدوار
يترك ن 1 - تردد دوران المجال المغناطيسي. يقوم نظام التيار المتردد متعدد المراحل بإنشاء مجال مغناطيسي دوار، تبلغ سرعة دورانه في الدقيقة n1=60f1/p، حيث f1 هو تردد التيار، وp هو عدد أزواج الأقطاب التي تشكلها كل مرحلة من الجزء الثابت لف.
ن 2 – سرعة الدوار . إذا كان الدوار يدور بتردد لا يساوي تردد دوران المجال المغناطيسي (n2≠n1)، فإن هذا التردد يسمى غير متزامن. في المحرك غير المتزامن، يمكن أن يعمل سير العمل فقط بتردد غير متزامن.
أثناء التشغيل، تكون سرعة الدوار دائمًا أقل من سرعة المجال.
( ن 2< ن 1)
1.2 مبدأ تشغيل المحرك غير المتزامن
في المحركات غير المتزامنة، يتم إنشاء مجال مغناطيسي دوار بواسطة نظام ثلاثي الطور عندما يكون متصلاً بشبكة التيار المتردد. يعبر المجال المغناطيسي الدوار للجزء الثابت موصلات ملف الدوار ويحفز القوة الدافعة الكهربية فيها. إذا كان لف الدوار مغلقًا أمام أي مقاومة أو تم قصره، فعندئذ تحت تأثير القوة الدافعة الكهربية المستحثة. يمر الحالية. نتيجة تفاعل التيار في الملف الدوار مع الملف الدوار حقل مغناطيسييُنشئ ملف الجزء الثابت عزمًا يبدأ تحت تأثيره الدوران في اتجاه دوران المجال المغناطيسي. لتغيير اتجاه دوران العضو الدوار، من الضروري تبديل الأماكن فيما يتعلق بأطراف الشبكة لأي اثنين من الأسلاك الثلاثة التي تربط ملف الجزء الثابت بالشبكة.
1.3 جهاز محرك غير متزامن
يتم تجنيد قلب الجزء الثابت من صفائح فولاذية بسمك 0.35 أو 0.5 مم. يتم ختم الألواح بأخاديد وتثبيتها في إطار المحرك. تم تثبيت السرير على الأساس. يتم وضع موصلات اللفات في الأخاديد الطولية للجزء الثابت، والتي ترتبط ببعضها البعض بحيث يتم تشكيل نظام ثلاثي الطور. لتوصيل اللفات الجزء الثابت شبكة ثلاثية الطوريمكن أن تكون متصلة بالنجمة أو الدلتا. هذا يجعل من الممكن تشغيل المحرك في الشبكة جهد مختلف. للمزيد من جهد منخفض(220/127 فولت) يتم توصيل لف الجزء الثابت في مثلث، للأعلى (380/220 فولت) - في نجمة. يتم أيضًا تجنيد قلب الدوار من ألواح فولاذية بسمك 0.5 مم. يتم ختم الألواح بأخاديد وتجميعها في عبوات مثبتة على عمود الماكينة. تشكل الحزم أسطوانة ذات أخاديد طولية يتم فيها وضع موصلات لف الدوار. اعتمادا على نوع لف الدوار آلات غير متزامنةقد يكون مع المرحلة وقصيرة الدائرة الدوار.لا يمكن تضمين المقاومة في ملف قصير الدائرة. في مرحلة اللف، تكون الموصلات مترابطة وتشكل نظام ثلاث مراحل. اللفات ثلاث مراحلمتصلة بواسطة نجمة. يمكن أن يكون لف الدوار قصير الدائرة أو مقاومًا. محركات ذات الدوار قفص السنجابأبسط وأرخص، ولكن محركات مع الدوار الجرحتتمتع بخصائص بدء وتحكم أفضل (تُستخدم عند قوى عالية). تتراوح قوة المحركات غير المتزامنة من عدة عشرات من الواط إلى 15000 كيلووات مع جهد لف الجزء الثابت يصل إلى 6 كيلو فولت. عيب المحركات غير المتزامنة هو انخفاض عامل الطاقة.
1.4 تشغيل محرك غير متزامن تحت الحمل
ن 1 - تردد دوران المجال المغناطيسي للجزء الثابت. ن 2 – سرعة الدوار .
ن 1 > ن 2
يدور المجال المغناطيسي للجزء الثابت في نفس اتجاه الجزء الدوار وينزلق بالنسبة للجزء الدوار بتردد ن س = ن 1 – ن 2
يتميز تأخر العضو الدوار عن المجال المغناطيسي الدوار للجزء الثابت بالانزلاق س = ن س / ن 1, => س = ( ن 1 – ن 2) / ن 1
إذا كان الدوار ثابتا، إذن ن 2 =0, س = ( ن 1 – ن 2) / ن 1, => س = ن 1 / ن 1 =1
إذا كان الجزء المتحرك يدور بشكل متزامن مع المجال المغناطيسي، فإن الانزلاق S = 0.
في تسكع، أي أنه في حالة عدم وجود حمل على عمود المحرك، يكون الانزلاق ضئيلًا ويمكن اعتباره مساويًا لـ 0. يمكن أن يكون الحمل على عمود الدوار، على سبيل المثال، قاطعًا مخرطة. يخلق عزم دوران الكبح. إذا كان عزم الدوران وعزم دوران الكبح متساويين، فسيعمل المحرك بثبات. إذا زاد الحمل على العمود، فإن عزم الكبح سيصبح أكبر من عزم الدوران وسرعة الدوار ن 2 سوف يتناقص. وفقا للصيغة س = ( ن 1 – ن 2) / ن 1 سوف يزيد الانزلاق. نظرًا لأن المجال المغناطيسي للجزء الثابت ينزلق بالنسبة للدوار بتردد ن س = ن 1 – ن 2, ثم سوف يعبر موصلات الدوار في كثير من الأحيان، وسيزداد فيها التيار وعزم دوران المحرك، والذي سيصبح قريبًا مساوٍ لعزم دوران الكبح. عندما ينخفض الحمل، يصبح عزم الكبح أقل من عزم الدوران، ويزيد ن 2 وينخفض س . يتناقص المجال الكهرومغناطيسي وتيار الدوار ويصبح عزم الدوران مساويًا مرة أخرى لعزم دوران الكبح. يظل التدفق المغناطيسي في فجوة الهواء بالماكينة ثابتًا تقريبًا لأي تغيير في الحمل.
2. خصائص أداء المحرك غير المتزامن
تعتمد خصائص أداء المحرك غير المتزامن
س – الانزلاق
n2 - سرعة الدوار
م – اللحظة المتقدمة
I1-الاستهلاك الحالي
استهلاك الطاقة P1
عامل الطاقة COSφ
من الطاقة المفيدة P2 على عمود الماكينة.
تتم إزالة هذه الخصائص في ظل الظروف الطبيعية. يظل التردد الحالي f1 والجهد U1 ثابتين. يتغير فقط الحمل على عمود المحرك.
مع زيادة الحمل على عمود المحرك، يزداد S. عندما يكون المحرك في وضع الخمول، n2≈n1، وS≈0. عند الحمل المقدر، يتراوح الانزلاق عادةً بين 3 و5%.
مع زيادة الحمل على عمود المحرك، تقل سرعة الدوران n2. إلا أن التغير في سرعة الدوران عند زيادة الحمل من 0 إلى القيمة الاسمية يكون ضئيلاً جداً ولا يتجاوز 5%. لذلك، فإن خاصية السرعة للمحرك غير المتزامن تكون جامدة. يحتوي المنحنى على ميل صغير جدًا للمحور الأفقي.
عزم الدوران م، الذي تم تطويره بواسطة المحرك، يتم موازنة عزم دوران الكبح على العمود جبلواللحظة م 0 ، سوف تتغلب على الخسائر الميكانيكية، وهذا هو م = جبل + م 0 = ف 2 /Ω 2 + م 0 ، أين ر 2 - قوة المحرك مفيدة , Ω 2 - السرعة الزاوية للدوار. في الخمول م= م 0. مع زيادة الحمل، يزداد عزم الدوران أيضًا، وبسبب الانخفاض الطفيف في سرعة الدوار، تحدث الزيادة في عزم الدوران بشكل أسرع من الطاقة المفيدة على العمود.
يختلف I1 الحالي الذي يستهلكه المحرك من الشبكة بشكل غير متساو مع زيادة الحمل على عمود المحرك. في وضع الخمول، يكون عامل الطاقة COSφ منخفضًا. والتيار يحتوي على مكون تفاعلي كبير. عند الأحمال المنخفضة على عمود المحرك، يكون المكون النشط لتيار الجزء الثابت أقل من المكون التفاعلي، وبالتالي فإن المكون النشط للتيار له تأثير ضئيل على التيار I1. عند الأحمال العالية، يصبح المكون النشط لتيار الجزء الثابت أكبر من المكون التفاعلي ويؤدي التغيير في الحمل إلى تغيير كبير في التيار I1.
يتم تصوير الاعتماد الرسومي للطاقة التي يستهلكها المحرك P1 على أنه خط مستقيم تقريبًا، ينحرف قليلاً للأعلى عند الأحمال العالية، وهو ما يفسره زيادة الخسائر في الجزء الثابت ولفائف الدوار مع زيادة الحمل.
إن اعتماد عامل الطاقة COSφ على الحمل على عمود المحرك هو كما يلي. في وضع الخمول، يكون COSφ صغيرًا، حوالي 0.2. نظرًا لأن المكون النشط لتيار الجزء الثابت، الناتج عن فقدان الطاقة في الماكينة، صغير مقارنة بالمكون التفاعلي لهذا التيار، مما يخلق تدفقًا مغناطيسيًا. مع زيادة الحمل على العمود، تزداد COSφ، لتصل إلى قيمة قصوى تبلغ 0.8-0.9، نتيجة لزيادة المكون النشط لتيار الجزء الثابت. في الأحمال العالية جدًا، هناك انخفاض طفيف في COSφ، لأنه بسبب الزيادة الكبيرة في الانزلاق وتردد التيار في الدوار، تزداد مفاعلة ملف الدوار.
منحنى الكفاءة له نفس الشكل الموجود في أي آلة أو محول. في حالة الخمول، الكفاءة = 0. مع زيادة الحمل على عمود المحرك، تزداد الكفاءة بشكل حاد ثم تنخفض. أعظم قيمةتصل الكفاءة إلى مثل هذا الحمل عندما تكون خسائر الطاقة في الفولاذ والخسائر الميكانيكية، بغض النظر عن الحمل، مساوية لفقدان الطاقة في ملفات الجزء الثابت والدوار، اعتمادًا على الحمل.
38) الخصائص الميكانيكية للمحرك غير المتزامن.
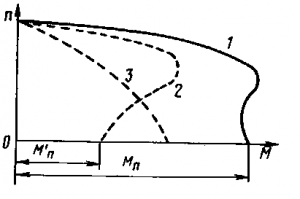
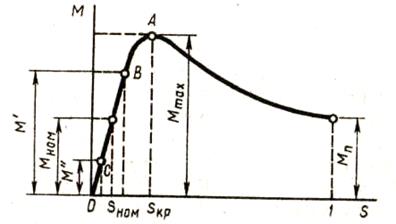
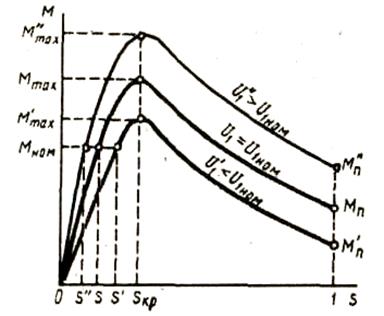
الخصائص الميكانيكية. يسمى اعتماد سرعة الدوار على الحمل (عزم الدوران على العمود) بالخاصية الميكانيكية للمحرك غير المتزامن (الشكل 262، أ). عند الحمل المقدر، تكون سرعة الدوران للمحركات المختلفة عادةً 98-92.5% من سرعة الدوران n 1 (slip s nom = 2 - 7.5%). كلما زاد الحمل، أي عزم الدوران الذي يجب أن يطوره المحرك، انخفضت سرعة الدوار. كما يظهر المنحنى
أرز. 262. الخصائص الميكانيكية للمحرك غير المتزامن: أ - طبيعي. ب - عند تشغيل مقاومة متغيرة
في التين. 262a، تنخفض سرعة دوران المحرك غير المتزامن بشكل طفيف فقط مع زيادة الحمل في النطاق من الصفر إلى أعلى قيمة له. لذلك يقال أن مثل هذا المحرك يتمتع بخاصية ميكانيكية صلبة.
يطور المحرك أقصى عزم دوران M max مع بعض الانزلاق s kp يصل إلى 10-20%. تحدد النسبة M max /M nom سعة التحميل الزائد للمحرك، وتحدد النسبة M p /M nom خصائص البداية.
لا يمكن للمحرك أن يعمل بثبات إلا إذا تم ضمان التنظيم الذاتي، أي يتم إنشاء توازن تلقائي بين عزم الحمل M int المطبق على العمود وعزم الدوران M الذي تم تطويره بواسطة المحرك. يتوافق هذا الشرط مع الجزء العلوي من الخاصية حتى يتم الوصول إلى M max (إلى النقطة B). إذا تجاوز عزم الدوران M عزم الدوران M الأقصى، فإن المحرك يفقد الاستقرار ويتوقف، في حين أن تيارًا أكبر بمقدار 5-7 مرات من التيار المقدر سوف يمر عبر لفات الماكينة لفترة طويلة، ويمكن أن يحترق .
عندما يتم توصيل مقاومة متغيرة بدائرة لف الدوار، نحصل على عائلة من الخصائص الميكانيكية (الشكل 262، ب). السمة 1 عندما يعمل المحرك بدون مقاومة متغيرة تسمى طبيعية. الخصائص 2 و 3 و 4، التي يتم الحصول عليها عن طريق توصيل مقاومة متغيرة بالمقاومات R 1p (المنحنى 2)، R 2p (المنحنى 3) و R 3p (المنحنى 4) إلى ملف دوار المحرك، تسمى الخصائص الميكانيكية المتغيرة. عند تشغيل مقاومة متغيرة، تصبح الخاصية الميكانيكية أكثر ليونة (أكثر انخفاضًا بشكل حاد)، مع زيادة المقاومة النشطة لدائرة الدوار R 2 وزيادة s kp. هذا يقلل من تيار البداية. يعتمد عزم الدوران M p أيضًا على R 2 . يمكنك اختيار مقاومة المقاومة المتغيرة بحيث يكون عزم الدوران M p مساويًا لأكبر M max.
في المحرك ذو عزم الدوران المتزايد، تقترب الخاصية الميكانيكية الطبيعية في شكلها من خاصية المحرك مع تشغيل مقاومة متغيرة. إن عزم دوران محرك القفص السنجابي المزدوج يساوي مجموع عزمي الدوران الناتجين عن أقفاص العمل والبدء. لذلك، يمكن الحصول على الخاصية 1 (الشكل 263) من خلال جمع الخاصيتين 2 و3 التي أنشأتها هذه الخلايا. عزم الدوران M 'p لمثل هذا المحرك أكبر بكثير من عزم الدوران M 'p لمحرك قفص السنجاب التقليدي. الأداء الميكانيكي للمحرك ذو الفتحة العميقة هو نفس أداء محرك القفص السنجابي المزدوج.
مجرد خاصية العمل!!!
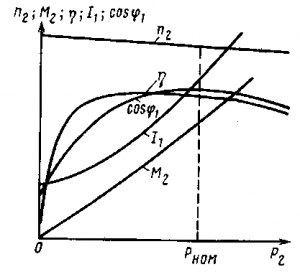
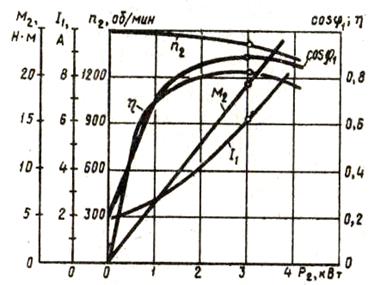
خصائص الأداء.خصائص أداء المحرك التعريفي هي اعتمادات سرعة الدوران n (أو الانزلاق s)، عزم الدوران على العمود M 2، تيار الجزء الثابت I 1 الكفاءة؟ وكوس؟ 1 ، من الطاقة المفيدة P 2 = P mx عند القيم المقدرة للجهد U 1 والتردد f 1 (الشكل 264). لقد تم تصميمها فقط لمنطقة التشغيل المستقر العملي للمحرك، أي من الانزلاق الذي يساوي الصفر إلى الانزلاق الذي يتجاوز الاسمي بنسبة 10-20٪. تتغير سرعة الدوران n قليلًا مع زيادة خرج الطاقة P2، تمامًا كما هو الحال في الخاصية الميكانيكية؛ يتناسب عزم الدوران على العمود M 2 مع القوة P 2، وهو أقل من اللحظة الكهرومغناطيسية M بقيمة عزم دوران الكبح M tr الناتج عن قوى الاحتكاك.
يزداد تيار الجزء الثابت I 1 مع زيادة خرج الطاقة، لكن عند P 2 = 0 يوجد تيار عدم حمل I 0 . تختلف الكفاءة بنفس الطريقة تقريبًا كما هو الحال في المحول، مع الحفاظ على قيمة كبيرة إلى حد ما على مدى حمل واسع نسبيًا.
أعلى قيمة للكفاءة للمحركات غير المتزامنة ذات الطاقة المتوسطة والعالية هي 0.75-0.95 (تتمتع الآلات عالية الطاقة بكفاءة أعلى في المقابل). عامل الطاقة كوس؟ 1 محركات غير متزامنة ذات قدرة متوسطة وعالية في حمولة كاملةيساوي 0.7-0.9. وبالتالي، فإنها تقوم بتحميل محطات توليد الطاقة والشبكات بتيارات تفاعلية كبيرة (من 70 إلى 40٪ من التيار المقنن)، وهو ما يعد عيبًا كبيرًا لهذه المحركات.
 أرز. 263. الخصائص الميكانيكية للمحرك غير المتزامن مع زيادة عزم الدوران (مع قفص السنجاب المزدوج)
أرز. 263. الخصائص الميكانيكية للمحرك غير المتزامن مع زيادة عزم الدوران (مع قفص السنجاب المزدوج)
 أرز. 264. خصائص أداء المحرك التعريفي
أرز. 264. خصائص أداء المحرك التعريفي
عند الأحمال التي تتراوح بين 25-50٪ من الحمل الاسمي، والتي غالبًا ما يتم مواجهتها أثناء تشغيل الآليات المختلفة، ينخفض عامل الطاقة إلى قيم غير مرضية من وجهة نظر الطاقة (0.5-0.75).
عند إزالة الحمل من المحرك، ينخفض معامل القدرة إلى قيم 0.25-0.3، وبالتالي لا ينبغي السماح للمحركات غير المتزامنة بالعمل بسرعة خاملة أو بأحمال ناقصة كبيرة.
يعمل في انخفاض الجهدوفشل إحدى المراحل.إن تقليل جهد الشبكة ليس له تأثير كبير على سرعة الدوار للمحرك غير المتزامن. ومع ذلك، في هذه الحالة، يتم تقليل الحد الأقصى لعزم الدوران الذي يمكن للمحرك غير المتزامن تطويره بشكل كبير (عندما ينخفض الجهد بنسبة 30٪، فإنه ينخفض بحوالي مرتين). لذلك، إذا انخفض الجهد بشكل كبير، فقد يتوقف المحرك، وإذا كان الجهد منخفضًا، فقد لا يبدأ العمل.
واحد. ملاحظة. التيار المتردد مع انخفاض الجهد في شبكة الاتصالوفقا لذلك، ينخفض \u200b\u200bالجهد في الشبكة ثلاثية الطور أيضا، والتي يتم تشغيل المحركات غير المتزامنة، والتي تقود الآلات المساعدة (المراوح، الضواغط، المضخات). من أجل ضمان العمل العاديالمحركات غير المتزامنة بجهد منخفض (يجب أن تعمل بشكل طبيعي عندما ينخفض الجهد إلى 0.75U nom)، قوة جميع محركات الآلات المساعدة عند e. ملاحظة. يتم أخذ ما يقرب من 1.5-1.6 مرة أكبر مما هو ضروري لقيادتهم عندما الفولطية. يعد هامش الطاقة هذا ضروريًا أيضًا بسبب بعض عدم تناسق الفولتية الطورية، منذ e. ملاحظة. لا يتم تشغيل المحركات غير المتزامنة بواسطة مولد ثلاثي الطور، ولكن بواسطة مقسم الطور. مع عدم تناسق الجهد، لن تكون تيارات الطور للمحرك هي نفسها ولن يكون تحول الطور بينهما مساوياً لـ 120 درجة. ونتيجة لذلك، سوف يتدفق تيار أكثر خلال إحدى المراحل، مما يتسبب في زيادة تسخين اللفات في هذه المرحلة. وهذا يجبر المحرك على الحد من حمله مقارنة بتشغيله بجهد متماثل. بالإضافة إلى ذلك، مع عدم تناسق الجهد، لا ينشأ مجال مغناطيسي دائري، ولكن بيضاوي الشكل ويتغير شكل الخصائص الميكانيكية للمحرك إلى حد ما. في الوقت نفسه، يتم تقليل الحد الأقصى ولحظات البداية. يتميز عدم تناسق الجهد بمعامل عدم تناسق، وهو يساوي متوسط الانحراف النسبي (بالنسبة المئوية) للجهود في المراحل الفردية عن متوسط الجهد (المتماثل). يعتبر نظام الجهد ثلاثي الطور متماثلًا عمليًا إذا كان هذا المعامل أقل من 5٪.
إذا انكسرت إحدى المراحل، يستمر المحرك في العمل، لكن التيارات المتزايدة سوف تتدفق عبر المراحل غير التالفة، مما يتسبب في زيادة تسخين اللفات؛ ولا ينبغي السماح بمثل هذا النظام. من المستحيل بدء تشغيل المحرك بمرحلة مكسورة، لأن هذا لا يخلق مجالًا مغناطيسيًا دوارًا، ونتيجة لذلك لن يدور دوار المحرك.
استخدام المحركات غير المتزامنة لقيادة الآلات المساعدة. ملاحظة. يوفر مزايا كبيرة على محركات التيار المستمر. عندما ينخفض الجهد في شبكة الاتصال، فإن سرعة دوران المحركات غير المتزامنة، وبالتالي إمداد الضواغط والمراوح والمضخات، لا تتغير عمليا. في محركات التيار المستمر، تتناسب سرعة الدوران مع جهد الإمداد، وبالتالي يتم تقليل إمداد هذه الآلات بشكل كبير.
خصائص أداء المحرك غير المتزامنتمثل الاعتمادات المعبر عنها بيانيًا لسرعة الدوران n2، والكفاءة η، وعزم الدوران المفيد (عزم الدوران على العمود) M2، وعامل القدرة cos φ، وتيار الجزء الثابت I1 على الطاقة المفيدة P2 عند U1 = const f1 = const.
خاصية السرعة n2 = f(P2). سرعة الدوار لمحرك غير متزامن n2 = n1(1 - s).
الانزلاق s = Pe2/Pem، أي يتم تحديد انزلاق المحرك غير المتزامن، وبالتالي سرعة دورانه، من خلال نسبة الفقد الكهربائي في الجزء المتحرك إلى الطاقة الكهرومغناطيسية.بإهمال الخسائر الكهربائية في الجزء الدوار في وضع الخمول، يمكننا أن نأخذ Re2 = 0، وبالتالي s ≈ 0 و n20 ≈ n1.
مع زيادة الحمل على العمود، تزداد النسبة s = Pe2/Pem، لتصل إلى قيم 0.01 - 0.08 عند الحمل المقدر. ووفقا لهذا، فإن الاعتماد n2 = f(P2) هو منحنى يميل قليلا إلى محور الإحداثي السيني. ومع ذلك، مع زيادة المقاومة النشطة للمحرك الدوار r2"، يزداد ميل هذا المنحنى. في هذه الحالة، تزداد التغيرات في تردد المحرك غير المتزامن n2 مع تقلبات الحمل P2. ويفسر ذلك حقيقة أنه عندما تكون r2" يزيد، وزيادة الخسائر الكهربائية في الدوار.
أرز. 1. خصائص أداء المحرك التعريفي
الاعتماد M2 = و (P2). يتم تحديد اعتماد عزم الدوران المفيد على عمود المحرك غير المتزامن M2 على الطاقة المفيدة P2 بواسطة التعبير M2 = P2/ ω2 = 60 P2/ (2πn2) = 9.55 P2/ n2،
حيث P2 - قوة مفيدة، W؛ ω2 = 2πf 2/ 60 - التردد الزاوي لدوران الدوار.
ويترتب على هذا التعبير أنه إذا كان n2 = const، فإن الرسم البياني M2 = f2(P2) هو خط مستقيم. ولكن في المحرك غير المتزامن، مع زيادة الحمل P2، تنخفض سرعة الدوار، وبالتالي فإن عزم الدوران المفيد على العمود M2 يزداد بشكل أسرع إلى حد ما مع زيادة الحمل، وبالتالي فإن الرسم البياني M2 = f (P2) له مظهر منحني الأضلاع.
أرز. 2. رسم تخطيطي متجه لمحرك غير متزامن عند الحمل الخفيف
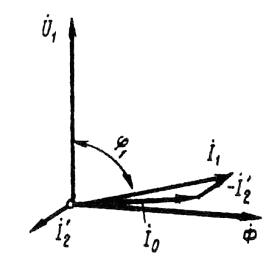
الاعتماد كوس φ1 = و (P2). نظرًا لحقيقة أن تيار الجزء الثابت للمحرك غير المتزامن I1 يحتوي على مكون تفاعلي (حثي) ضروري لإنشاء مجال مغناطيسي في الجزء الثابت، فإن عامل القدرة للمحركات غير المتزامنة أقل من الوحدة. أدنى قيمةعامل الطاقة يتوافق مع وضع الخمول.ويفسر ذلك حقيقة أن تيار عدم التحميل للمحرك الكهربائي I0 يظل دون تغيير عمليًا عند أي حمل. لذلك، عند أحمال المحرك المنخفضة، يكون تيار الجزء الثابت صغيرًا ويكون متفاعلًا إلى حد كبير (I1 ≈ I0). ونتيجة لذلك، فإن تحول الطور لتيار الجزء الثابت بالنسبة للجهد يكون مهمًا (φ1 ≈ φ0)، فقط أقل بقليل من 90 درجة (الشكل 2).
عادة لا يتجاوز عامل الطاقة للمحركات غير المتزامنة في وضع الخمول 0.2.مع زيادة الحمل على عمود المحرك، يزداد المكون النشط للتيار I1 ويزداد عامل القدرة، ليصل إلى أعلى قيمة له (0.80 - 0.90) عند حمل قريب من الحمل المقدر. الزيادة الإضافية في الحمل على عمود المحرك تكون مصحوبة بانخفاض في cos φ1، وهو ما يفسره زيادة في المقاومة الحثية للدوار (x2s) بسبب زيادة الانزلاق، وبالتالي تردد التيار في الدوار.
من أجل تحسين عامل القدرة للمحركات الحثية، من المهم للغاية أن يتم تشغيل المحرك في جميع الأوقات، أو على الأقل في جزء كبير من الوقت، بالقرب من الحمل المقدر له.لا يمكن ضمان ذلك إلا إذا اتخاذ القرار الصحيحقوة المحرك. إذا كان المحرك يعمل تحت الحمل لجزء كبير من الوقت، فمن أجل زيادة cos φ1، فمن المستحسن تقليل الجهد U1 الذي يتم توفيره للمحرك. على سبيل المثال، في المحركات التي تعمل بتوصيل دلتا لملف الجزء الثابت، يمكن القيام بذلك عن طريق إعادة توصيل ملفات الجزء الثابت بنجمة، مما سيؤدي إلى انخفاض جهد الطورفي الوقت المناسب. في هذه الحالة، يتناقص التدفق المغناطيسي للجزء الثابت، وبالتالي تيار المغنطة، بمقدار عامل تقريبًا. وبالإضافة إلى ذلك، فإن المكون النشط للتيار الثابت يزيد قليلا. كل هذا يساعد على تحسين عامل قوة المحرك.
عزم الدوران الكهرومغناطيسييتم إنشاء محرك غير متزامن من خلال تفاعل التيار في الملف الدوار مع مجال مغناطيسي دوار.
عزم الدوران الكهرومغناطيسي ميتناسب مع القوة الكهرومغناطيسية:
 (3.40)
(3.40)
سرعة الدوران المتزامن الزاوي.
بالتعويض عن قيمة القدرة الكهرومغناطيسية (3.33) في (3.39) نحصل على:
 , (3.41)
, (3.41)
أي أن عزم الدوران الكهرومغناطيسي للمحرك غير المتزامن يتناسب مع قوة الفقد الكهربائي في ملف الدوار.
إذا تم استبدال قيمة تيار الجزء المتحرك وفقًا للتعبير (3.28) بـ (3.41)، فإننا نحصل على صيغة عزم الدوران الكهرومغناطيسي لآلة غير متزامنة (Nm):
 (3.42)
(3.42)
معلمات الدائرة المكافئة لآلة غير متزامنة ص 1 , ص 2 , × 1و × 2، المضمنة في التعبير (3.42)، ثابتة، حيث تظل قيمها دون تغيير عمليًا عندما يتغير تحميل الجهاز. يمكن أيضًا اعتبار الجهد على ملف الطور الثابت ثابتًا ش 1والتردد و 1. في التعبير عن اللحظة مالمتغير الوحيد هو الانزلاق س، والتي يمكن أن تأخذ قيمًا مختلفة في أوضاع التشغيل المختلفة لجهاز غير متزامن في النطاق من + ¥ إلى -¥ (انظر الشكل 3.5).
دعونا نفكر في اعتماد عزم الدوران على الانزلاق م = و (ق)في ش 1= ثابت، و 1= المعلمات الثابتة والثابتة للدائرة المكافئة. عادة ما يسمى هذا الاعتماد الخصائص الميكانيكيةآلة غير متزامنة. تحليل التعبير (3.42) وهو تعبير تحليلي للخاصية الميكانيكية م = و (ق)، يوضح ذلك بالنسبة لقيم الانزلاق س= 0 و س= ¥ اللحظة الكهرومغناطيسية م= 0. ويترتب على ذلك أن الخاصية الميكانيكية م = و (ق)لديه الحد الأقصى.
لتحديد حجم الانزلاق الحرج ق كر، المقابلة للعزم الأقصى، من الضروري أخذ المشتقة الأولى لـ (3.42) ومساواتها بالصفر: . نتيجة ل
 (3.43)
(3.43)
بتعويض قيمة الانزلاق الحرج (حسب 3.43) في تعبير العزم الكهرومغناطيسي (3.42)، بعد سلسلة من التحولات نحصل على التعبير أقصى عزم دوران(ن م):
 (3.44)
(3.44)
في (3.43) و (3.44)، تتوافق علامة الزائد مع وضع المحرك، وعلامة الطرح تتوافق مع وضع المولد لتشغيل الآلة غير المتزامنة.
بالنسبة للآلات غير المتزامنة للأغراض العامة، المقاومة النشطة لملف الجزء الثابت ص 1أقل بكثير من مجموع التفاعلات الحثية: ص 1< < (x 1 + x¢ 2). وبالتالي إهمال القيمة ص 1، نحصل على تعبيرات مبسطة للقسيمة الحرجة
 , (3.45)
, (3.45)
والحد الأقصى لعزم الدوران (نيوتن متر)
 (3.46)
(3.46)
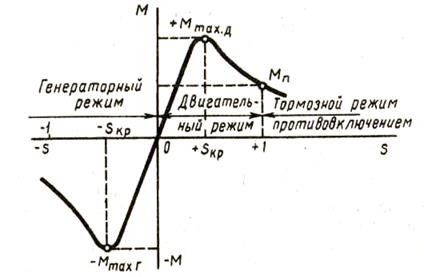
أرز. 3.10. اعتماد أوضاع تشغيل الآلة غير المتزامنة على الانزلاق
يوضح تحليل التعبير (3.44) أن الحد الأقصى لعزم الدوران لآلة غير متزامنة في وضع المولد أكبر منه في وضع المحرك ( م ماكس ز > م تاشد). في التين. 3.4 يوضح الخصائص الميكانيكية للآلة غير المتزامنة م = و (ق)في ش 1= ثابت. تُظهر هذه الخاصية المناطق المقابلة لأنماط التشغيل المختلفة: وضع المحرك (0< س < 1), когда электромагнитный момент ميدور؛ وضع المولد ( - ¥ < s < 0) и тормозной режим противовключением (1 < س < + ¥), когда электромагнитный момент مهو مثبط.
من (3.42) يترتب على ذلك أن عزم الدوران الكهرومغناطيسي للمحرك غير المتزامن يتناسب مع مربع جهد الشبكة: م ≡ ش 1 2. ينعكس هذا بشكل كبير في الخصائص التشغيلية للمحرك: حتى الانخفاض الطفيف في جهد التيار الكهربائي يؤدي إلى انخفاض ملحوظ في عزم دوران المحرك غير المتزامن. على سبيل المثال، عندما ينخفض جهد الشبكة بنسبة 10% مقارنة بالجهد الاسمي ( ش 1 = 0.9اسمك) يتم تقليل عزم الدوران الكهرومغناطيسي للمحرك بنسبة 19٪: م ™ = 0.9 2 م = 0.81م، أين م- عزم الدوران عند جهد التيار الكهربائي المقدر، و م- عزم الدوران عند الجهد المنخفض.
لتحليل تشغيل محرك غير متزامن، يكون من الملائم أكثر استخدام الخاصية الميكانيكية م = و (ق)،يظهر في الشكل. 3.5.
 |
أرز. 3.11. اعتماد عزم الدوران الكهرومغناطيسي لمحرك غير متزامن على الانزلاق
عند تشغيل المحرك، يبدأ المجال المغناطيسي للجزء الثابت، الذي لا يحتوي على قصور ذاتي، في الدوران على الفور بتردد متزامن ن 1، في الوقت نفسه، يظل دوار المحرك، تحت تأثير قوى القصور الذاتي، بلا حراك في اللحظة الأولى لبدء التشغيل ( ن 2= 0) والانزلاق س = 1.
استبدال الانزلاق في (3.42) س= 1 نحصل على التعبير ابتداء من عزم الدورانمحرك غير متزامن (ن م):
 (3.47)
(3.47)
تحت تأثير هذه اللحظة، يبدأ دوار المحرك في الدوران، بينما يقل الانزلاق ويزداد عزم الدوران وفقًا للخاصية م = و (ق). في زلة حرجة ق كرتصل اللحظة إلى قيمتها القصوى م ما س.
مع زيادة أخرى في سرعة الدوران (تناقص الانزلاق)، فإن عزم الدوران ميبدأ في الانخفاض حتى يصل إلى قيمة ثابتة تساوي مجموع عزم الدوران المتعارض المطبق على دوار المحرك: عزم الدوران XX م0وعزم الدوران المفيد (عزم الدوران على عمود المحرك) م 2، إنه
م = م 0 + م 2 = م ش. (3.48)
يجب أن يؤخذ في الاعتبار أنه عندما تكون الانزلاقات قريبة من الوحدة (وضع بدء تشغيل المحرك)، فإن معلمات الدائرة المكافئة للمحرك غير المتزامن تغير قيمها بشكل ملحوظ. ويفسر ذلك بشكل رئيسي بعاملين: زيادة التشبع المغناطيسي لطبقات الأسنان للجزء الثابت والدوار، مما يؤدي إلى انخفاض في مقاومة التسرب الاستقرائي × 1و × 2، وتأثير إزاحة التيار في قضبان الدوار مما يؤدي إلى زيادة المقاومة النشطة لملف الدوار ص 2 سنت. ولذلك فإن معلمات الدائرة المكافئة للمحرك غير المتزامن المستخدمة عند حساب عزم الدوران الكهرومغناطيسي وفق (3.42) و(3.44) و(3.46) لا يمكن استخدامها لحساب عزم البدء وفق (3.47).
لحظة ثابتة M شيساوي مجموع لحظات المواجهة أثناء الدوران المنتظم للدوار ( ن 2= ثابت). لنفترض أن العزم المعاكس على عمود المحرك م 2يتوافق مع الحمل المقنن للمحرك. في هذه الحالة، سيتم تحديد وضع التشغيل الثابت للمحرك من خلال نقطة على الخاصية الميكانيكية مع الإحداثيات م = م اسمو ق = ق اسم،أين م اسمو لا.- القيم الاسمية لعزم الدوران الكهرومغناطيسي والانزلاق.
ومن تحليل الخصائص الميكانيكية يتبع ذلك أيضًا أن التشغيل المستقر للمحرك غير المتزامن ممكن مع انزلاقات أقل من الحرجة (س< s кр )، أي في قسم الزراعة العضوية للخاصية الميكانيكية. الحقيقة هي أنه في هذا القسم يكون التغيير في الحمل على عمود المحرك مصحوبًا بتغيير مماثل في عزم الدوران الكهرومغناطيسي.
لذلك، إذا كان المحرك يعمل الوضع الاسمي (اسم م ؛ لا.)، ثم كانت هناك مساواة في اللحظات: م اسم = م 0 + م 2. إذا كان هناك زيادة في عزم الحمل م 2إلى القيمة م 2، فسيتم انتهاك مساواة اللحظات، أي. م اسم< М 0 + М 2 ، وسوف تبدأ سرعة الدوار في الانخفاض (سيزداد الانزلاق). سيؤدي ذلك إلى زيادة عزم الدوران الكهرومغناطيسي إلى القيمة م ™ = م 0 + م ™ 2، (النقطة ب)، وبعدها يصبح وضع تشغيل المحرك ثابتًا مرة أخرى.
إذا، عندما يعمل المحرك في الوضع الاسمي، ينخفض \u200b\u200bعزم عزم الحمل إلى القيمة م ™ 2، فسيتم انتهاك تكافؤ اللحظات مرة أخرى، ولكن الآن سيتم انتهاك عزم الدوران أكثر من المبلغمعارضة: اسم م > م 0 + م ™ 2. ستبدأ سرعة الدوار في الزيادة (سينخفض الانزلاق)، وهذا سيؤدي إلى انخفاض في عزم الدوران الكهرومغناطيسي مإلى القيمة م ™ = م 0 + م ™ 2(النقطة ج)؛ سيتم استعادة التشغيل المستقر مرة أخرى، ولكن بقيم مختلفة مو س.
يصبح تشغيل المحرك غير المتزامن غير مستقر عند الانزلاق ق³س كر. لذلك، إذا كان عزم الدوران الكهرومغناطيسي للمحرك م = م كحد أقصى، والانزلاق ق = ق كر، ثم حتى زيادة طفيفة في عزم الدوران الحمل م 2مما يسبب زيادة في الانزلاق س، سيؤدي إلى انخفاض في عزم الدوران الكهرومغناطيسي م. وسيتبع ذلك زيادة أخرى في الانزلاق، وما إلى ذلك، حتى يصل الانزلاق س= 1 أي حتى يتوقف دوار المحرك.
وهكذا، عندما يصل عزم الدوران الكهرومغناطيسي إلى قيمته القصوى، فإن حد التشغيل المستقر للمحرك التعريفي يبدأ. لذلك، من أجل التشغيل المستقر للمحرك، من الضروري أن يكون مجموع لحظات الحمل المؤثرة على الدوار أقل من الحد الأقصى لعزم الدوران: م ش = (م 0 + م 2)< М тах . ولكن لكي يكون تشغيل المحرك التعريفي موثوقًا به، وحتى لا تتسبب الأحمال الزائدة العشوائية قصيرة المدى في توقف المحرك، فمن الضروري أن يكون لديه القدرة الزائدة.
قدرة المحرك الزائد λ تحددها نسبة الحد الأقصى للحظة م طهإلى الاسمية م اسم. بالنسبة للمحركات غير المتزامنة للأغراض العامة، تكون سعة التحميل الزائد = 1.7 ÷ 2.5.
وتجدر الإشارة أيضًا إلى أن المحرك يعمل عند الانزلاق س< s кр ، أي في قسم العمل للخاصية الميكانيكية، هو الأكثر اقتصادا، لأنه يتوافق مع قيم صغيرة من الانزلاق، وبالتالي، لقيم أقل من الخسائر الكهربائية في لف الدوار P e2 = sP em.
إن استخدام الصيغة (3.35) لحساب الخصائص الميكانيكية للمحركات غير المتزامنة ليس ممكنًا دائمًا، نظرًا لأن معلمات الدائرة المكافئة للمحركات لا يتم تقديمها عادةً في الكتالوجات والكتب المرجعية، لذلك، بالنسبة للحسابات العملية، تكون صيغة عزم الدوران المبسطة تستخدم عادة. تعتمد هذه الصيغة على افتراض أن المقاومة النشطة للملف الثابت للمحرك التعريفي ص 1= 0 في هذه الحالة:
 (3.49)
(3.49)
يتم تحديد الانزلاق الحرج بواسطة الصيغة:
![]() . (3.50)
. (3.50)
يكون حساب الخاصية الميكانيكية أسهل بكثير إذا تم إجراؤه بوحدات نسبية  . في هذه الحالة، معادلة الخاصية الميكانيكية لها الشكل:
. في هذه الحالة، معادلة الخاصية الميكانيكية لها الشكل:
 . (3.51)
. (3.51)
يعد استخدام الصيغة المبسطة (3.51) هو الأكثر ملاءمة عند حساب قسم العمل للخاصية الميكانيكية أثناء الانزلاق س< s кр لأن الخطأ في هذه الحالة لا يتجاوز القيم المسموح بها للحسابات الفنية. عند الانزلاق ق > ق كريمكن أن يصل الخطأ إلى 15-17%.
الخصائص الميكانيكية للمحرك غير المتزامن مع التغيرات في جهد التيار الكهربائي والمقاومة النشطة للملف الدوار
من (3.42)، (3.44) و (3.47) يمكن ملاحظة أن عزم الدوران الكهرومغناطيسي للمحرك التعريفي، وكذلك قيمه القصوى وقيم البداية، تتناسب مع مربع الجهد المزود إلى ملف الجزء الثابت: م ≡ ش 1 2 .وفي الوقت نفسه، يوضح تحليل التعبير (3.43) أن قيمة الانزلاق الحرج لا تعتمد على الجهد ش 1.وهذا يمنحنا الفرصة للبناء الخصائص الميكانيكية م = و (ق)ل معان مختلفةالجهد االكهربى ش 1(الشكل 3.12)، والذي يترتب عليه تقلبات جهد الشبكة ش 1نسبة إلى قيمتها الاسمية يو 1nomلا تكون مصحوبة بتغييرات في الحد الأقصى وعزم الدوران فحسب، بل أيضًا بتغيرات في سرعة الدوار.
 |
أرز. 3.12. تأثير الجهد على نوع الخاصية الميكانيكية للمحرك التعريفي
مع انخفاض الجهد الكهربائي، تنخفض سرعة الدوار (يزداد الانزلاق). الجهد االكهربى ش 1يؤثر على تعيين الحد الأقصى لعزم الدوران م تاه،وكذلك سعة التحميل الزائد للمحرك. لذلك، إذا كان الجهد ش 1انخفض بنسبة 30٪، أي. U 1 = 0.7U اسم،عندها سينخفض العزم الأقصى للمحرك غير المتزامن بأكثر من النصف:
م ™ ماكس = 0.7 2 م ماكس = 0.49م كحد أقصى.
إلى أي مدى ستنخفض سعة التحميل الزائد للمحرك، على سبيل المثال، إذا كانت سعة التحميل الزائد عند جهد الشبكة المقدر  ، ثم عندما ينخفض الجهد بنسبة 30%، تقل سعة التحميل الزائد للمحرك
، ثم عندما ينخفض الجهد بنسبة 30%، تقل سعة التحميل الزائد للمحرك  ، أي| المحرك غير قادر على تحمل حتى الحمل المقدر.
، أي| المحرك غير قادر على تحمل حتى الحمل المقدر.
كما يلي من (3.44)، فإن قيمة الحد الأقصى لعزم دوران المحرك لا تعتمد على مقاومة الدوار النشطة ص 2 .أما بالنسبة للقسيمة الحرجة ق كر,إذن، كما يتبين من (3.43)، فإنه يتناسب مع المقاومة ص 2 .وبالتالي، إذا تمت زيادة المقاومة النشطة للدائرة الدوارة في محرك غير متزامن تدريجيًا، فإن قيمة عزم الدوران الأقصى ستبقى دون تغيير، وسيزداد الانزلاق الحرج (الشكل 3.13). في هذه الحالة، عزم دوران المحرك م صيزداد مع زيادة المقاومة ص 2حتى بعض القيمة. في الشكل هذا يتوافق مع المقاومة ص 2 ثالثا، حيث يكون عزم الدوران المبدئي مساوياً للحد الأقصى. مع زيادة المقاومة ص 2يتناقص عزم الدوران عند البدء.
 |
أرز. 3.13. تأثير المقاومة النشطة للملف الدوار على الخصائص الميكانيكية للمحرك غير المتزامن.
تحليل الرسم البياني م = و (ق)،يظهر في الشكل. يوضح الشكل 3.13 أيضًا التغيرات في مقاومة الدوار ص 2مصحوبة بتغيرات في سرعة الدوران: مع زيادة ص 2في لحظة التحميل المستمر م شيزداد الانزلاق، أي تقل سرعة الدوران (نقاط 1, 2, 3 و 4).
يتم استخدام تأثير المقاومة النشطة للملف الدوار على شكل الخصائص الميكانيكية للمحركات غير المتزامنة في تصميم المحركات. على سبيل المثال، يجب أن تتمتع المحركات غير المتزامنة للأغراض العامة بخاصية السرعة "الصلبة" (انظر الشكل 3.11)، أي أن تعمل بانزلاق اسمي صغير. يتم تحقيق ذلك باستخدام ملف دوار ذو مقاومة نشطة منخفضة في المحرك. ص 2.وفي الوقت نفسه، يتمتع المحرك بكفاءة أعلى بسبب انخفاض الخسائر الكهربائية في ملف الدوار ( R e2 = م 1 أنا ™ 2 2 ص 2). القيمة المحددة ص 2يجب أن يزود المحرك بعزم الدوران المطلوب.
إذا كان من الضروري الحصول على محرك ذو عزم دوران متزايد، قم بزيادة المقاومة النشطة لملف الدوار. لكن في نفس الوقت يحصلون على محرك به قيمة عظيمةالانزلاق الاسمي، وبالتالي بكفاءة أقل.
التبعيات في الاعتبار م = و(ش 1)و م = و(ص 2 ")لديها أيضا كبيرة أهمية عمليةعند النظر في قضايا بدء وتنظيم سرعة دوران المحركات غير المتزامنة.
خصائص أداء المحرك غير المتزامن
يتم التعبير عن خصائص التشغيل للمحرك غير المتزامن (الشكل 3.14) بيانيًا حسب اعتماد سرعة الدوران ن 2، كفاءة ح، عزم الدوران المفيد (لحظة على العمود) م 2، عامل القوى كوسφ 1، والتيار الثابت أنا 1، من القوة المفيدة ص 2في ش 1= ثابت و و 1= ثابت.
أرز. 3.14. خصائص أداء المحرك غير المتزامن
خاصية السرعةص 2 = و(ف 2).
سرعة الدوار للمحرك غير المتزامن
ن 2 = ن 1 (1-ق).
الانزلاق على (3.33)
أي أن انزلاق المحرك، وبالتالي سرعة دورانه، يتحدد بنسبة الفقد الكهربائي في الدوار إلى الطاقة الكهرومغناطيسية ص م.
يمكننا أن نفترض إهمال الخسائر الكهربائية في الدوار في وضع الخمول ص ه2= 0، وبالتالي ق 0 ≈ 0 و ن 20 ≈ ن 1،. مع زيادة الحمل على عمود المحرك تزداد النسبة (8.1) لتصل إلى قيم 0.01 ÷ 0.08 عند الحمل المقنن. وفقا لهذا الاعتماد ن 2 = و(ف 2)يمثل منحنى يميل قليلاً إلى محور الإحداثي السيني.
ومع ذلك، مع زيادة المقاومة النشطة للدوار ص 2تزداد زاوية ميل هذا المنحنى. في هذه الحالة، تتغير سرعة الدوران ن 2أثناء تقلبات الحمل ص 2تتزايد. ويفسر ذلك حقيقة أنه مع زيادة ص 2زيادة الخسائر الكهربائية في الدوار [انظر. (3.31)].
خاصية الأداء الميكانيكي M 2 = f(P 2)
الاعتماد على عزم الدوران المفيد على عمود المحرك م 2من القوة المفيدة ص 2يتم تحديده من خلال التعبير
 (3.53)
(3.53)
أين ص 2— قوة مفيدة، ث؛
- التردد الزاوي لدوران الدوار.
ويترتب على هذا التعبير أنه إذا ن 2= const، ثم الرسم البياني م 2 = و(ف 2)هو خط مستقيم. ولكن في محرك غير متزامن مع زيادة الحمل ص 2تنخفض سرعة الدوار، وبالتالي تنخفض العزم المفيد على العمود م 2مع زيادة الحمل، يزيد الحمل بشكل أسرع إلى حد ما، وبالتالي الرسم البياني م 2 = و(ف 2)له مظهر منحني.
الاعتماد cosφ 1 = f(P 2)
يرجع ذلك إلى حقيقة أن الجزء الثابت الحالي أنا 1يحتوي على مكون تفاعلي (حثي) ضروري لإنشاء مجال مغناطيسي في الجزء الثابت، وعامل القدرة للمحركات غير المتزامنة أقل من الوحدة.
أدنى قيمة لعامل الطاقة تتوافق مع الوضع XX. ويفسر ذلك حقيقة أن XX الحالي أنا 0تحت أي حمل يبقى دون تغيير تقريبا. لذلك، عند أحمال المحرك المنخفضة، يكون تيار الجزء الثابت صغيرًا ويكون تفاعليًا إلى حد كبير ( أنا 1 ≈ أنا 0). ونتيجة لذلك، فإن تحول الطور لتيار الجزء الثابت بالنسبة للجهد كبير ( φ ≈ φ 0 ) ، أقل بقليل من 90 درجة (الشكل 3.15).
عادة لا يتجاوز عامل الطاقة للمحركات غير المتزامنة في وضع الخمول 0.2. مع زيادة الحمل على عمود المحرك، يزداد المكون النشط للتيار أنا 1ويزداد عامل القدرة ليصل إلى أعلى قيمة له (0.80 ÷ 0.90) عند حمل قريب من الحمل المقدر.
 |
الشكل 3.15. رسم تخطيطي متجه لمحرك غير متزامن عند حمل خفيف
الزيادة الإضافية في الحمل مصحوبة بانخفاض كوسφ 1، وهو ما يفسره زيادة في التفاعل الحثي للدوار ( × 2 ثانية) بسبب زيادة الانزلاق، وبالتالي تردد التيار في الدوار. من أجل تحسين عامل القدرة للمحركات الحثية، من المهم للغاية أن يتم تشغيل المحرك في جميع الأوقات، أو على الأقل في جزء كبير من الوقت، عند مستوى قريب من الحمل المقدر.
لا يمكن تحقيق ذلك إلا من خلال الاختيار الصحيح لقوة المحرك. إذا كان المحرك يعمل لفترة طويلة دون التحميل الزائد، فهذا يعني زيادة كوسφ 1الجهد المناسب المطبق على المحرك ش 1ينقص.
على سبيل المثال، في المحركات التي تعمل مع اتصال دلتا لملف الجزء الثابت، يمكن القيام بذلك عن طريق إعادة توصيل ملفات الجزء الثابت بنجم، مما سيؤدي إلى انخفاض جهد الطور بمقدار عامل. في هذه الحالة، يتناقص التدفق المغناطيسي للجزء الثابت، وبالتالي تيار المغنطة، بمقدار عامل تقريبًا. وبالإضافة إلى ذلك، فإن المكون النشط للتيار الثابت يزيد قليلا. كل هذا يساعد على تحسين عامل قوة المحرك.
في التين. 3.16 يظهر الرسوم البيانية التبعية كوسφ 1محرك غير متزامن من الحمل عند توصيل اللفات الثابتة بنجمة (منحنى 1 ) والمثلث (المنحنى 2).
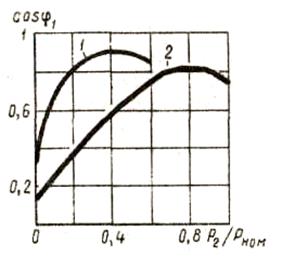
أرز. 3.16. مدمن كوسφ 1من الحمل عند توصيل الجزء الثابت بنجمة (1) ومثلث (2).
أسئلة الاختبار الذاتي
1. شرح مبدأ تشغيل الآلة غير المتزامنة.
2. وصف أوضاع تشغيل الآلة غير المتزامنة.
3. ما يسمى انزلاق آلة غير متزامنة؟
4. اكتب معادلات الجهد للمحرك غير المتزامن؟
5. اكتب معادلات MMF وتيارات المحرك غير المتزامن.
6. ارسم دوائر مكافئة لمحرك غير متزامن.
7. ارسم مخطط متجهاتمحرك غير متزامن.
8. ما هي الخسائر الموجودة في محرك غير متزامن؟ ارسم مخطط الطاقة للمحرك التعريفي.
9. اكتب صيغة عزم الدوران الكهرومغناطيسي للمحرك غير المتزامن.
10. ارسم رسمًا بيانيًا للخصائص الميكانيكية للمحرك التعريفي.
11. كيف تتغير الخصائص الميكانيكية للمحرك غير المتزامن اعتمادًا على التغيرات في جهد الشبكة ومقاومة الدوار النشطة؟
12. رسم خصائص التشغيل للمحرك التعريفي.
أعمال الهندسة الكهربائية
" خصائص أداء المحرك غير المتزامن "
تيتناول الطعام
الآلة الكهربائية غير المتزامنة هي آلة كهربائية تعمل بالتيار المتردد حيث لا تساوي سرعة الدوار سرعة دوران المجال المغناطيسي للجزء الثابت وتعتمد على الحمل. يتم استخدامه بشكل رئيسي كمحرك وكمولد. يحتوي الجزء الثابت على فتحات يتم فيها وضع ملف أحادي أو متعدد الطور (عادةً ثلاثي الطور)، متصل بشبكة التيار المتردد. تم تصميم هذا الملف لإنشاء مجال مغناطيسي متحرك، دائري دوار للآلات ثلاثية الطور، وبيضاوي نابض أو دوّار للآلات أحادية الطور. تم تصميم الدوار، وهو جزء دوار من الآلة الكهربائية، أيضًا لإنشاء مجال مغناطيسي يؤدي، بالتفاعل مع مجال الجزء الثابت، إلى إنشاء عزم كهرومغناطيسي يحدد اتجاه تحويل الطاقة. في المولدات، تكون هذه اللحظة بمثابة كبح بطبيعتها، مما يعاكس عزم دوران المحرك الأساسي الذي يقود الدوار. على العكس من ذلك، في المحركات، هذه اللحظة هي اللحظة الدافعة، التي تتغلب على مقاومة الآلية المدفوعة بالدوار.
المولد غير المتزامن عبارة عن آلة كهربائية غير متزامنة تعمل في وضع المولد. مصدر مساعد للتيار الكهربائي منخفض الطاقة وجهاز الكبح (في محرك كهربائي).
المحرك الكهربائي غير المتزامن هو آلة كهربائية غير متزامنة تعمل في وضع المحرك. الأكثر شيوعًا هو المحرك الكهربائي غير المتزامن ثلاثي الطور (الذي اخترعه M. O. Dolivo-Dobrovolsky في عام 1889). تتميز المحركات الكهربائية غير المتزامنة بالبساطة النسبية في التصميم والموثوقية التشغيلية، ولكنها تمتلك نطاق سرعة محدود وعامل طاقة منخفض عند الأحمال المنخفضة. الطاقة من أجزاء من W إلى عشرات MW.
1 . بارِعمحرك متزامن
1.1 تردد الدورانالمجال المغناطيسي والدوار
يترك ن1 - تردد دوران المجال المغناطيسي. يقوم نظام التيار المتناوب متعدد الأطوار بإنشاء مجال مغناطيسي دوار، تردد دورانه في الدقيقة هو n1=60f1/p، حيث f1 هو تردد التيار، p هو عدد أزواج الأقطاب التي تشكلها كل مرحلة من ملفات الجزء الثابت.
ن2 - سرعة الدوار . إذا كان الجزء المتحرك يدور بتردد لا يساوي تردد دوران المجال المغناطيسي (n2?n1)، فإن هذا التردد يسمى غير متزامن. في المحرك غير المتزامن، يمكن أن يعمل سير العمل فقط بتردد غير متزامن.
أثناء التشغيل، تكون سرعة الدوار دائمًا أقل من سرعة المجال.
(ن2< ن1)
1.2 مبدأعمل محرك غير متزامن
في المحركات غير المتزامنة، يتم إنشاء مجال مغناطيسي دوار بواسطة نظام ثلاثي الطور عندما يكون متصلاً بشبكة التيار المتردد. يعبر المجال المغناطيسي الدوار للجزء الثابت موصلات ملف الدوار ويحفز القوة الدافعة الكهربية فيها. إذا كان لف الدوار مغلقًا أمام أي مقاومة أو تم قصره، فعندئذ تحت تأثير القوة الدافعة الكهربية المستحثة. يمر الحالية. نتيجة لتفاعل التيار في الملف الدوار مع المجال المغناطيسي الدوار لملف الجزء الثابت، يتم إنشاء عزم الدوران، تحت تأثيره يبدأ الدوار في الدوران في اتجاه دوران المجال المغناطيسي. لتغيير اتجاه دوران العضو الدوار، من الضروري تبديل الأماكن فيما يتعلق بأطراف الشبكة لأي اثنين من الأسلاك الثلاثة التي تربط ملف الجزء الثابت بالشبكة.
1 .3 نحنمحرك ثلاثي غير متزامن
يتم تجنيد قلب الجزء الثابت من صفائح فولاذية بسمك 0.35 أو 0.5 مم. يتم ختم الألواح بأخاديد وتثبيتها في إطار المحرك. تم تثبيت السرير على الأساس. يتم وضع موصلات اللفات في الأخاديد الطولية للجزء الثابت، والتي ترتبط ببعضها البعض بحيث يتم تشكيل نظام ثلاثي الطور. لتوصيل ملفات الجزء الثابت بشبكة ثلاثية الطور، يمكن توصيلها بنجمة أو مثلث. وهذا يجعل من الممكن توصيل المحرك بشبكة ذات جهود مختلفة. بالنسبة للجهود المنخفضة (220/127 فولت)، يتم توصيل ملف الجزء الثابت في مثلث، للجهد العالي (380/220 فولت) - في النجم. يتم أيضًا تجنيد قلب الدوار من ألواح فولاذية بسمك 0.5 مم. يتم ختم الألواح بأخاديد وتجميعها في عبوات مثبتة على عمود الماكينة. تشكل الحزم أسطوانة ذات أخاديد طولية يتم فيها وضع موصلات لف الدوار. اعتمادا على نوع لف الدوار، يمكن أن تكون الآلات غير المتزامنة المرحلة وقصيرة الدائرة الدوار.لا يمكن تضمين المقاومة في ملف قصير الدائرة. في مرحلة اللف، ترتبط الموصلات ببعضها البعض، وتشكل نظامًا ثلاثي الطور. ترتبط لفات المراحل الثلاث بنجمة. يمكن أن يكون لف الدوار قصير الدائرة أو مقاومًا. المحركات ذات الدوار القفصي السنجابي أبسط وأرخص، لكن المحركات ذات الدوار الملفوف لها خصائص تشغيل وتحكم أفضل (تُستخدم عند قوى عالية). تتراوح قوة المحركات غير المتزامنة من عدة عشرات من الواط إلى 15000 كيلووات مع جهد لف الجزء الثابت يصل إلى 6 كيلو فولت. عيب المحركات غير المتزامنة هو انخفاض عامل الطاقة.
1 .4 رعبوت asynhمحرك رون تحت الحمل
ن1 - تردد دوران المجال المغناطيسي للجزء الثابت. ن2 - سرعة الدوار .
ن1 > ن2
يدور المجال المغناطيسي للجزء الثابت في نفس اتجاه الجزء الدوار وينزلق بالنسبة للجزء الدوار بتردد نس= ن1 - ن2
يتميز تأخر العضو الدوار عن المجال المغناطيسي الدوار للجزء الثابت بالانزلاق س= نس/ ن1 , => س = (ن1 - ن2 ) / ن1
إذا كان الدوار ثابتا، إذن ن2 =0, س= (ن1 - ن2 ) / ن1 , => س = ن1 / ن1 =1
إذا كان الجزء المتحرك يدور بشكل متزامن مع المجال المغناطيسي، فإن الانزلاق S = 0.
في حالة الخمول، أي في حالة عدم وجود حمل على عمود المحرك، يكون الانزلاق ضئيلًا ويمكن اعتباره مساويًا لـ 0. يمكن أن يكون الحمل على عمود الدوار، على سبيل المثال، قاطع مخرطة. يخلق عزم دوران الكبح. إذا كان عزم الدوران وعزم دوران الكبح متساويين، فسيعمل المحرك بثبات. إذا زاد الحمل على العمود، فإن عزم الكبح سيصبح أكبر من عزم الدوران وسرعة الدوار ن2 سوف يتناقص. وفقا للصيغة س = (ن1 - ن2 ) / ن1 سوف يزيد الانزلاق. نظرًا لأن المجال المغناطيسي للجزء الثابت ينزلق بالنسبة للدوار بتردد نس= ن1 - ن2 , ثم سوف يعبر موصلات الدوار في كثير من الأحيان، وسيزداد فيها التيار وعزم دوران المحرك، والذي سيصبح قريبًا مساوٍ لعزم دوران الكبح. عندما ينخفض الحمل، يصبح عزم الكبح أقل من عزم الدوران، ويزيد ن2 وينخفض س. يتناقص المجال الكهرومغناطيسي وتيار الدوار ويصبح عزم الدوران مساويًا مرة أخرى لعزم دوران الكبح. يظل التدفق المغناطيسي في فجوة الهواء بالماكينة ثابتًا تقريبًا لأي تغيير في الحمل.
2 . رعشخصية برميلهرطقة محرك غير متزامن
تعتمد خصائص أداء المحرك غير المتزامن
س – الانزلاق
n2 - سرعة الدوار
م - لحظة التطور
I1-الاستهلاك الحالي
استهلاك الطاقة P1
COS؟-عامل الطاقة
من الطاقة المفيدة P2 على عمود الماكينة.
تتم إزالة هذه الخصائص في ظل الظروف الطبيعية. يظل التردد الحالي f1 والجهد U1 ثابتين. يتغير فقط الحمل على عمود المحرك.
مع زيادة الحمل على عمود المحرك، يزداد S. عندما يكون المحرك في وضع الخمول، n2?n1، وS?0. عند الحمل المقدر، يتراوح الانزلاق عادةً بين 3 و5%.
مع زيادة الحمل على عمود المحرك، تقل سرعة الدوران n2. إلا أن التغير في سرعة الدوران عند زيادة الحمل من 0 إلى القيمة الاسمية يكون ضئيلاً جداً ولا يتجاوز 5%. لذلك، فإن خاصية السرعة للمحرك غير المتزامن تكون جامدة. يحتوي المنحنى على ميل صغير جدًا للمحور الأفقي.
عزم الدوران م، الذي تم تطويره بواسطة المحرك، يتم موازنة عزم دوران الكبح على العمود جبلواللحظة م0 ، سوف تتغلب على الخسائر الميكانيكية، وهذا هو م = جبل + م0 = ر2 / ? 2 + م0 ، أين ر2 - قوة المحرك المفيدة , ? 2 - السرعة الزاوية للدوار. في الخمول م= م0. مع زيادة الحمل، يزداد عزم الدوران أيضًا، وبسبب الانخفاض الطفيف في سرعة الدوار، تحدث الزيادة في عزم الدوران بشكل أسرع من الطاقة المفيدة على العمود.
يختلف I1 الحالي الذي يستهلكه المحرك من الشبكة بشكل غير متساو مع زيادة الحمل على عمود المحرك. في وضع الخمول، يكون عامل الطاقة COS منخفضًا. والتيار يحتوي على مكون تفاعلي كبير. عند الأحمال المنخفضة على عمود المحرك، يكون المكون النشط لتيار الجزء الثابت أقل من المكون التفاعلي، وبالتالي فإن المكون النشط للتيار له تأثير ضئيل على التيار I1. عند الأحمال العالية، يصبح المكون النشط لتيار الجزء الثابت أكبر من المكون التفاعلي ويؤدي التغيير في الحمل إلى تغيير كبير في التيار I1.
يتم تصوير الاعتماد الرسومي للطاقة التي يستهلكها المحرك P1 على أنه خط مستقيم تقريبًا، ينحرف قليلاً للأعلى عند الأحمال العالية، وهو ما يفسره زيادة الخسائر في الجزء الثابت ولفائف الدوار مع زيادة الحمل.
إن اعتماد عامل القدرة COS على الحمل على عمود المحرك هو كما يلي. عندما تسكع COS؟ صغيرة، حوالي 0.2. نظرًا لأن المكون النشط لتيار الجزء الثابت، الناتج عن فقدان الطاقة في الماكينة، صغير مقارنة بالمكون التفاعلي لهذا التيار، مما يخلق تدفقًا مغناطيسيًا. مع زيادة الحمل على رمح COS؟ يزيد ليصل إلى أعلى قيمة 0.8-0.9 نتيجة لزيادة المكون النشط لتيار الجزء الثابت. في الأحمال العالية جدًا، هناك انخفاض طفيف في COS؟، لأنه بسبب الزيادة الكبيرة في الانزلاق وتردد التيار في الدوار، تزداد مفاعلة ملف الدوار.
منحنى الكفاءة؟ له نفس المظهر كما هو الحال في أي آلة أو محول. في حالة الخمول، الكفاءة = 0. مع زيادة الحمل على عمود المحرك، تزداد الكفاءة بشكل حاد ثم تنخفض. تصل الكفاءة إلى أعلى قيمة لها عند الحمل عندما تكون خسائر الطاقة في الفولاذ والخسائر الميكانيكية، بغض النظر عن الحمل، مساوية لفقد الطاقة في ملفات الجزء الثابت والدوار، والتي تعتمد على الحمل.














 قنوات البيع للطماطم (البندورة).")









