وزارة التعليم والعلوم الاتحاد الروسي
المؤسسة التعليمية الحكومية للتعليم المهني العالي يوجنو أورالسكي جامعة الدولة
فرع في زلاتوست
محركات التيار المباشر
زد-431.583.270102
أكملها: شاريبوفا يو.ر.
المجموعة: ZD-431
تم الفحص بواسطة: Rumyantsev.E.
1 المقدمة
2. تصميم ومبدأ تشغيل محركات التيار المستمر
3. تشغيل المحركات
4. البيانات الفنية للمحركات
5. كفاءة محركات التيار المستمر
6 خصائص محرك التيار المستمر
6.1 خصائص الأداء
6.2 الخصائص الميكانيكية
7. قائمة المراجع المستخدمة
1 المقدمة
سيارات كهربائيةيستخدم التيار المستمر على نطاق واسع في الصناعات المختلفةصناعة.
يتم تفسير الانتشار الكبير للمحركات الكهربائية التي تعمل بالتيار المستمر من خلال صفاتها القيمة: عزم الدوران العالي والفرامل والحمل الزائد، والسرعة العالية نسبيًا، وهو أمر مهم عند الرجوع للخلف والفرملة، والقدرة على التحكم في سرعة الدوران على نطاق واسع وسلس.
تُستخدم المحركات الكهربائية التي تعمل بالتيار المستمر في المحركات القابلة للتعديل، على سبيل المثال، لتشغيل الآلات والآليات المختلفة. وتصل قوة هذه المحركات الكهربائية إلى مئات الكيلووات. فيما يتعلق بأتمتة التحكم عمليات الانتاجتعمل الآليات والآليات على توسيع نطاق تطبيق محركات التيار المستمر منخفضة الطاقة استخدام عامالطاقة من الوحدات إلى مئات واط.
اعتمادًا على دائرة إمداد الطاقة، يتم تقسيم ملفات الإثارة لآلة التيار المستمر إلى عدة أنواع (مع إثارة مستقلة ومتوازية ومتسلسلة ومختلطة).
الإنتاج السنوي لآلات التيار المستمر في الاتحاد الروسي أقل بكثير من إنتاج الآلات التيار المتناوبوذلك بسبب ارتفاع تكلفة محركات التيار المستمر.
في البداية، تم إنشاء آلات التيار المستمر. وفي وقت لاحق، تم استبدالها إلى حد كبير بآلات التيار المتردد. بفضل القدرة على تنظيم سرعة الدوران بسلاسة واقتصادية، تحتفظ محركات التيار المستمر بدورها المهيمن في النقل، لقيادة الآلات المعدنية، في الرافعات وآليات الرفع. في أنظمة الأتمتة، تُستخدم آلات التيار المستمر على نطاق واسع كمحركات تشغيل، ومحركات لقيادة آليات التسجيل الذاتي لشريط، كمولدات سرعة ومكبرات صوت للآلات الكهربائية.
2. تصميم ومبدأ تشغيل محركات التيار المستمر
يظهر هيكل آلات التيار المستمر (المولدات والمحركات) بشكل مبسط في الشكل 1. يتم توصيل القطبين الرئيسيين والأربعة الإضافية بالغطاء الفولاذي 1 للجزء الثابت للماكينة. يوجد على الأعمدة الرئيسية ملف إثارة 3، وعلى الأعمدة الإضافية يوجد ملف من أعمدة إضافية 5. ويخلق ملف الإثارة التدفق المغناطيسي F للآلة.
رسم بياني 1
يتم تثبيت دائرة مغناطيسية أسطوانية 6 على عمود المحرك 10، في الأخاديد التي يوجد بها ملف حديد التسليح 7. يتم ربط أقسام لف حديد التسليح بالعاكس 9. كما يتم ضغط الفرش الثابتة 8 عليه بواسطة الينابيع. المثبت على عمود المحرك يتكون من عدد من الألواح النحاسية باستخدام عاكس التيار والفرش، يتم توصيل ملف عضو الإنتاج بالخارج دائرة كهربائية. في المحركات، تعمل أيضًا على تحويل تيار الدائرة الخارجية، والذي يكون ثابتًا في الاتجاه، إلى تيار يتغير في الاتجاه في موصلات ملف عضو الإنتاج.
تعمل الأعمدة الإضافية المزودة بلف عليها على تقليل الشرارة بين الفرش ومبدل التيار في الماكينة. يتم توصيل لف الأعمدة الإضافية بشكل متسلسل مع لف حديد التسليح وتشغيله المخططات الكهربائيةفي كثير من الأحيان لا يصور.
لتقليل فقد الطاقة، يتم تصنيع الدائرة المغناطيسية لعضو الإنتاج من صفائح فولاذية منفصلة. جميع اللفات مصنوعة من سلك معزول. بالإضافة إلى المحركات ذات القطبين الرئيسيين، هناك آلات التيار المستمر ذات أربعة أقطاب رئيسية أو أكثر. وفي الوقت نفسه، يزداد عدد الأعمدة الإضافية ومجموعات الفرش وفقًا لذلك.
إذا تم توصيل المحرك الجهد المستمرثم عند التفاعل حقل مغناطيسي، الناتجة عن لف الإثارة والتيار في موصلات عضو الإنتاج، يظهر عزم الدوران يعمل على عضو الإنتاج:
![]() (1)
(1)
حيث K M هو معامل يعتمد على معلمات تصميم الآلة؛ F - التدفق المغناطيسي لقطب واحد؛ أنا - تيار عضو الإنتاج.
إذا كان عزم دوران المحرك عند n = 0 يتجاوز عزم دوران الكبح الذي تم تحميل المحرك به، فسوف يبدأ عضو الإنتاج في الدوران. مع زيادة سرعة الدوران n، تزداد القوة الدافعة الكهربية المستحثة في عضو الإنتاج. وهذا يؤدي إلى انخفاض في تيار المحرك:
![]() (3)
(3)
حيث r I هي مقاومة عضو الإنتاج.
نتيجة انخفاض التيار أنا هو انخفاض في عزم دوران المحرك. عندما يتساوى عزم دوران المحرك والحمل، تتوقف سرعة الدوران عن التغير.
يعتمد اتجاه عزم دوران المحرك، وبالتالي اتجاه دوران عضو الإنتاج، على اتجاه التدفق المغناطيسي والتيار في موصلات ملف عضو الإنتاج. لتغيير اتجاه دوران المحرك، يجب عليك تغيير اتجاه تيار عضو الإنتاج أو تيار المجال.
3. تشغيل المحركات
من الصيغة (3) يترتب على ذلك أنه في اللحظة الأولى بعد تشغيل المحرك في شبكة جهد التيار المستمر، أي. متى و ،
نظرًا لأن المقاومة r I صغيرة، فإن تيار عضو الإنتاج يمكن أن يكون أعلى بمقدار 10...30 مرة من التيار المقدر للمحرك، وهو أمر غير مقبول، لأنه سيؤدي إلى حدوث شرارة شديدة وتدمير عاكس التيار. بالإضافة إلى ذلك، مع مثل هذا التيار، يحدث عزم دوران محرك مرتفع بشكل غير مقبول، ومع البدء المتكرر، من الممكن ارتفاع درجة حرارة لف حديد التسليح.
لتنقيص او لتقليل بدءا الحاليفي دائرة عضو الإنتاج، تشمل مقاومة البدء، والتي تقل مقاومتها إلى الصفر مع زيادة سرعة المحرك. إذا تم تشغيل المحرك تلقائيا، فإن المقاوم البداية مصنوع من عدة مراحل، والتي يتم إيقاف تشغيلها بالتتابع مع زيادة سرعة الدوران.
المحرك يبدأ الحالي
![]()
مع تسارع المحرك، يزداد المجال الكهرومغناطيسي في ملف عضو الإنتاج، وعلى النحو التالي من الصيغة (3)، يؤدي ذلك إلى انخفاض في تيار عضو الإنتاج I R. لذلك، مع زيادة سرعة المحرك، تنخفض المقاومة في دائرة عضو الإنتاج. من أجل الحصول على عزم دوران كبير عند بدء التشغيل بتيار بدء صغير نسبيًا، يتم تشغيل المحرك بأعلى تدفق مغناطيسي. وبالتالي، يجب أن يكون تيار الإثارة عند بدء التشغيل هو الحد الأقصى المسموح به، أي. اسمى، صورى شكلى، بالاسم فقط.
4. البيانات الفنية للمحركات
يحتوي جواز سفر المحرك والأدبيات المرجعية لمحركات التيار المستمر على البيانات الفنية التالية: الجهد المقدر U والطاقة P n وسرعة الدوران n n والتيار I n والكفاءة.
نعني بـ U n الجهد الذي تم تصميم ملف عضو الإنتاج والمجمع من أجله، وكذلك، في معظم الحالات، ملف المجال الموازي. مع الأخذ في الاعتبار الجهد المقنن، يتم اختيار المواد العازلة الكهربائية للمحرك.
التصنيف الحاليأنا ن – الحد الأقصى الحالي المسموح به(يستهلك من الشبكة)، حيث يسخن المحرك إلى أعلى مستوياته درجة الحرارة المسموح بها، العمل بالوضع (طويل الأمد، متقطع، قصير الأمد) الذي صمم من أجله:
![]()
حيث I yang هو تيار عضو الإنتاج عند الحمل المقدر؛ أنا vn – تيار لف الإثارة عند الجهد المقنن.
تجدر الإشارة إلى أن تيار الإثارة هو vn للمحرك الإثارة الموازيةصغير نسبيًا، لذلك يتم تناوله عادةً عند الحمل المقنن
الطاقة المقدرة P n هي الطاقة التي يطورها المحرك الموجود على العمود عند التشغيل مع الحمل المقدر (عزم الدوران) وبالسرعة المقدرة n n.
تتوافق سرعة الدوران n n والكفاءة مع تشغيل المحرك بالتيار I n والجهد U n بدون مقاومات إضافية في دوائر المحرك.
في الحالة العامةترتبط قوة العمود P 2 وعزم الدوران M وسرعة الدوران n بالعلاقة:
الطاقة P 1 التي يستهلكها المحرك من الشبكة، القيم P 2، الكفاءة، U، I مرتبطة بالعلاقات:
ومن الواضح أن هذه العلاقات صالحة أيضا ل الوضع الاسميتشغيل المحرك.
5. كفاءة محركات التيار المستمر
الكفاءة هي المؤشر الأكثر أهمية لمحركات التيار المستمر. كلما كان أكبر، كلما انخفضت الطاقة P والتيار الذي يستهلكه المحرك من الشبكة بنفس القوة الميكانيكية. في منظر عامالتبعية هي:
![]() (9)
(9)
أين الخسارة في لف حديد التسليح؟ - الخسائر في لف الإثارة. - الخسائر في الدائرة المغناطيسية حديد التسليح؛ - الخسائر الميكانيكية.
فقدان الطاقة مستقل ولا يعتمد إلا قليلاً على حمل المحرك.
تم تصميم المحركات بحيث تكون قيمة الكفاءة القصوى في المنطقة قريبة من القوة المصنفة. يعد تشغيل المحركات بأحمال منخفضة أمرًا غير مرغوب فيه نظرًا لصغر قيم r i. قيم كفاءة المحرك مع طرق مختلفةتختلف الإثارة والطاقة من 1 إلى 100 كيلو واط عند الحمل المقنن ويبلغ متوسطها 0.8.
6. خصائص محركات التيار المستمر
6.1. خصائص الأداء
يُطلق على العمال اسم التعديل والسرعة وعزم الدوران والكفاءة. صفات.
خاصية التنظيم
تمثل خاصية التحكم اعتماد سرعة الدوران P على تيار الإثارة Ib في حالة بقاء تيار عضو الإنتاج Ia وجهد الشبكة U دون تغيير، أي n=f(Iv) مع Ia=const وU=const.
طالما أن الفولاذ الخاص بالمحرك المغناطيسي للآلة غير مشبع، يتغير التدفق Ф بما يتناسب مع تيار الإثارة Iв. في هذه الحالة، تكون خاصية التحكم زائدية. نظرًا لأنه يتشبع عند التيارات العالية IV، فإن الخصائص تقترب من الخطية (الشكل 2). عند القيم المنخفضة للتيار الرابع، تزداد سرعة الدوران بشكل حاد. لذلك، عندما تنقطع دائرة الإثارة لمحرك ذي إثارة متفرعة (Iv = 0)، فإن سرعة دورانه تصل إلى حدود غير مقبولة، كما يقولون: "المحرك يعمل بشكل جامح". قد يكون الاستثناء هو المحركات الصغيرة التي لها عزم دوران كبير نسبيًا M0 حركة خاملة.
أرز. 2. خصائص التحكم في المحرك
في المحركات المتسلسلة Iв = Iа. في حالة الأحمال المنخفضة، يكون تيار عضو الإنتاج Ia صغيرًا وقد تكون سرعة الدوران عالية جدًا، لذا فإن البدء والتشغيل عند أحمال منخفضة أمر غير مقبول. المحركات الدقيقة هي هكذا. وفي الحالة السابقة قد يشكل استثناءً.
خصائص السرعة .
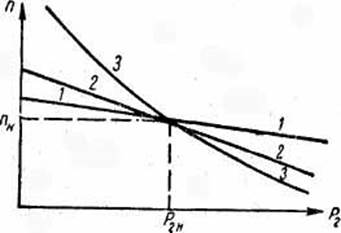
تعطي خصائص السرعة اعتماد سرعة الدوران n على الطاقة المفيدة P2 على عمود المحرك إذا ظل الجهد U للشبكة والمقاومة rv لمتغير الضبط لدائرة الإثارة دون تغيير، أي n=f(P2)، مع U=const و rв = const .
أرز. 3. خصائص السرعة
مع زيادة تيار عضو الإنتاج وزيادة الحمل الميكانيكي لمحرك الإثارة المتوازي، يزداد انخفاض الجهد في عضو الإنتاج في نفس الوقت ويظهر تفاعل عضو الإنتاج، والذي يعمل عادةً بطريقة إزالة المغناطيسية. السبب الأول يميل إلى تقليل سرعة دوران المحرك، والثاني - زيادته. عادةً ما يكون لتأثير انخفاض الجهد في عضو الإنتاج تأثير أكبر. لذلك، فإن خاصية السرعة لمحرك الإثارة المتوازي لها طابع هبوطي قليلاً (المنحنى 1، الشكل 3).
في المحرك ذو الملف المتسلسل، تيار عضو الإنتاج هو تيار الإثارة. ونتيجة لذلك، فإن خاصية السرعة للمحرك ذي الإثارة المتسلسلة لها طابع قريب من القطع الزائد. مع زيادة الحمل عندما تصبح الدائرة المغناطيسية مشبعة، تصبح الخاصية أكثر خطية (المنحنى 3 في الشكل 3).
في المحرك المركب، عندما يتم تشغيل اللفات وفقًا لذلك، تحتل خاصية السرعة موقعًا متوسطًا بين خصائص المحرك المتوازي والمتحمس على التوالي (المنحنى 2).
خصائص اللحظة.
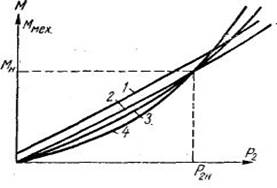
توضح خصائص عزم الدوران كيف يتغير عزم الدوران M مع تغيير الطاقة المفيدة P2 على عمود المحرك، إذا ظل جهد الشبكة U ومقاوم rv لمقاومة متغيرة الضبط في دائرة الإثارة دون تغيير، أي M = f(P2)، مع U=const، rv=const.
عزم دوران مفيد على عمود المحرك
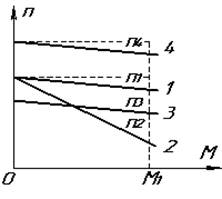
إذا لم تتغير سرعة دوران محرك الإثارة المتوازي مع الحمل، فإن اعتماد عزم الدوران على القدرة المفيدة سيتم تمثيله بيانياً بخط مستقيم يمر عبر أصل الإحداثيات. في الواقع، تقل سرعة الدوران مع زيادة الحمل. لذلك، فإن خاصية عزم الدوران المفيد تنحني إلى الأعلى قليلاً (المنحنى 2، الشكل 4). وفي الوقت نفسه، المنحنى لحظة كهرومغناطيسية M يمر فوق منحنى عزم الدوران المفيد مميش قيمة ثابتة، يساوي عزم الدوران الخامل M0 (المنحنى 1).
أرز. 4. خصائص اللحظة
في المحرك المثار على التوالي، يقترب نوع خاصية عزم الدوران من القطع المكافئ، حيث يحدث التغيير في عزم الدوران من تيار الحمل، وفقًا لقانون القطع المكافئ، حتى يتم تشبع الفولاذ. مع حدوث التشبع، يصبح الاعتماد أكثر خطية (المنحنى 4). في المحرك المركب، تحتل خاصية عزم الدوران (المنحنى 3) موقعًا متوسطًا بين خصائص محرك الإثارة المتوازي والمتسلسل.
خصائص التغيرات في الكفاءة.
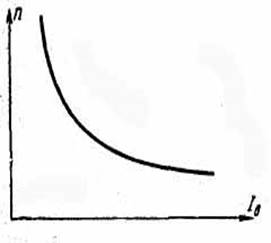
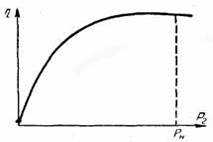
منحنى الكفاءة مقابل الحمل له شكل مميز لجميع المحركات (الشكل 5). يمر المنحنى عبر الأصل ويزداد بسرعة مع زيادة القدرة المفيدة إلى 1/4 من القدرة المقدرة. عند القدرة P2 التي تساوي حوالي 2/3 من القدرة المقدرة، تصل الكفاءة عادة إلى قيمتها القصوى. مع زيادة الحمل إلى القيمة المقدرة، تظل الكفاءة ثابتة أو تنخفض قليلاً.
أرز. 5. تغيير كفاءة المحرك
6.2 الخصائص الميكانيكية
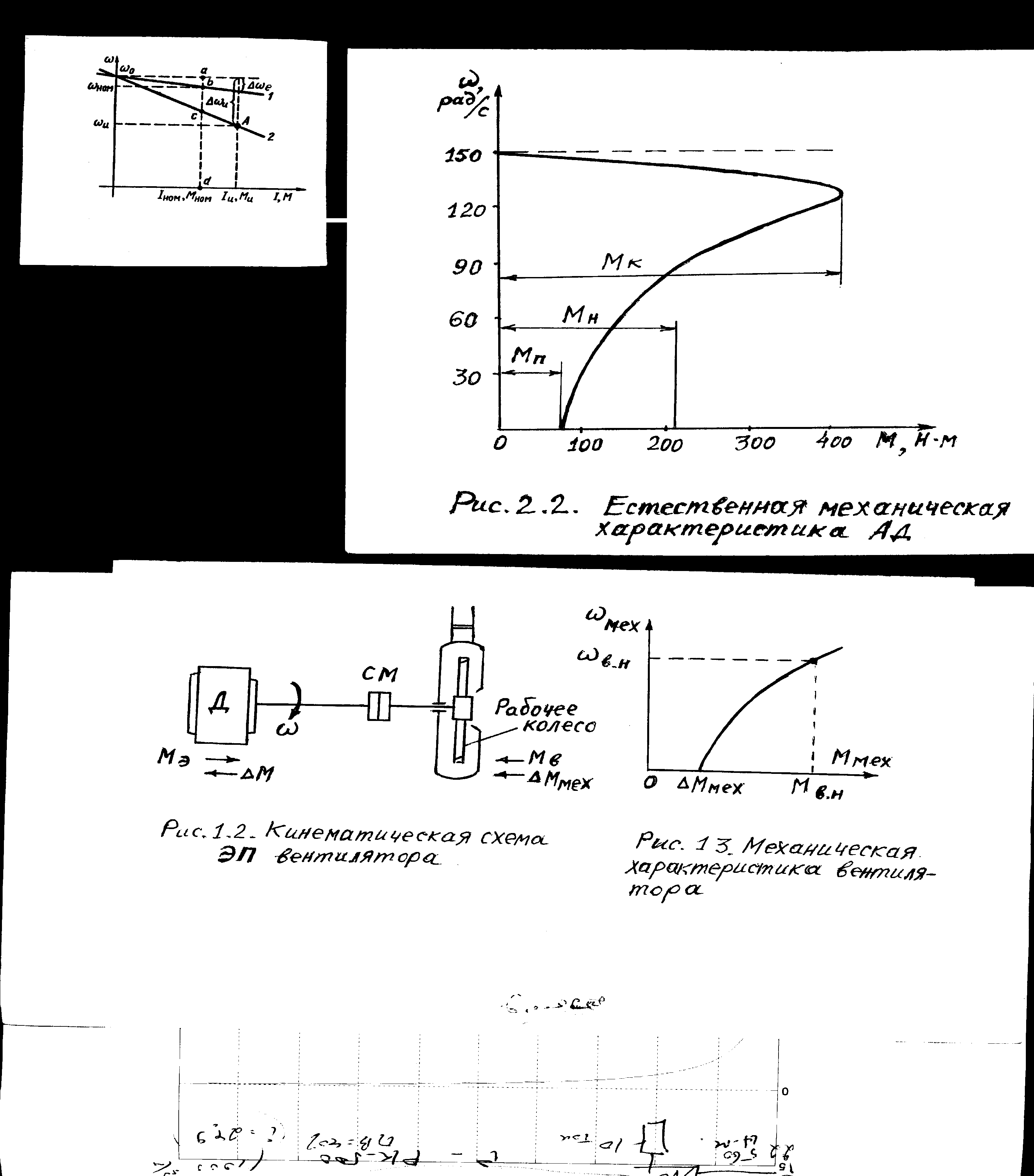
وأهم ما يميزالمحرك ميكانيكي n(M). يوضح كيف تعتمد سرعة المحرك على عزم الدوران الذي تم تطويره. إذا كانت اللفات المحرك متصلة الفولتية المقدرةولا توجد مقاومات إضافية في دوائره، فالمحرك يتمتع بخاصية ميكانيكية تسمى الطبيعية. في الخاصية الطبيعية هناك نقطة تتوافق مع البيانات الاسمية للمحرك (M n، P i، وما إلى ذلك). إذا كان الجهد على ملف عضو الإنتاج أقل من الجهد المقنن، أو I V< I вн, то двигатель будет иметь различные искусственные механические характеристики. На этих характеристиках двигатель работает при пуске, торможении, реверсе и регулировании частоты вращения.
تحويل التعبير (3) بالنسبة لسرعة الدوران، نحصل على معادلة الخاصية الكهروميكانيكية n(I i):
![]() (7)
(7)
بعد استبدال التيار I في المعادلة (7) حسب الصيغة (1)، نحصل على معادلة الخاصية الميكانيكية n(M):
![]() (8)
(8)
عندما تكون Ф = const، تكون الخصائص الكهروميكانيكية n(I i) والميكانيكية n(M) لمحرك الإثارة المتوازي خطوطًا مستقيمة. نظرًا لأن التدفق المغناطيسي يتغير قليلاً بسبب تفاعل عضو الإنتاج، فإن الخصائص تختلف في الواقع إلى حد ما عن الخصائص المستقيمة.
عند التباطؤ (M = 0)، يكون للمحرك سرعة تباطؤ يحددها الحد الأول من المعادلة (8). كلما زاد الحمل، انخفض n. كما يلي من المعادلة (8)، يتم تفسير ذلك من خلال وجود مقاومة حديد التسليح r.
نظرًا لأن r i ليس كبيرًا، فإن سرعة دوران المحرك تتغير قليلاً مع زيادة عزم الدوران، والمحرك لديه خاصية ميكانيكية طبيعية صلبة (الشكل 6، الخاصية 1).
يترتب على المعادلة (8) أنه يمكن ضبط سرعة الدوران عند حمل ثابت معين (M = const) بثلاث طرق:
أ) تغيير في مقاومة دائرة عضو الإنتاج؛
ب) تغيير التدفق المغناطيسي للمحرك.
ج) تغيير الجهد عند أطراف المحرك.
أرز. 6 الخصائص الميكانيكية
لتنظيم سرعة الدوران بالطريقة الأولى في دائرة عضو الإنتاج. يجب إضافة مقاومة إضافية r d ثم يجب استبدال المقاومة في المعادلة (8) بـ r i + r d.
على النحو التالي من المعادلة (8)، ترتبط سرعة الدوران n بمقاومة دائرة عضو الإنتاج r i + r d عند حمل ثابت (M = const) عن طريق الاعتماد الخطي، أي. ومع زيادة المقاومة، تقل سرعة الدوران. تتوافق المقاومات المختلفة مع العديد من الخصائص الميكانيكية الاصطناعية، وتظهر إحداها في الشكل 2 (الخاصية 2). باستخدام الخاصية 2، عند عزم دوران معين M1، يمكنك الحصول على سرعة الدوران n2.
يتم تغيير سرعة الدوران بالطريقة الثانية باستخدام مصدر جهد قابل للتعديل UD2. من خلال تغيير جهده باستخدام المنظم R2، يمكنك تغيير تيار الإثارة I V وبالتالي التدفق المغناطيسي للمحرك. كما يتبين من المعادلة (8)، عند حمل ثابت (M = const)، فإن سرعة الدوران لها اعتماد معقد على التدفق المغناطيسي F. يوضح تحليل المعادلة (8) أنه في نطاق معين من التغيرات في المجال المغناطيسي التدفق F، يؤدي انخفاض الأخير إلى زيادة في سرعة الدوران. يتم استخدام هذا النطاق من تباين التدفق عند تنظيم سرعة الدوران.
تتوافق كل قيمة تدفق مغناطيسي مع قيمة اصطناعية الخصائص الميكانيكيةالمحرك، يظهر أحدها في الشكل 2 (السمة 4). باستخدام الخاصية 4 عند عزم الدوران M1، يمكنك الحصول على سرعة الدوران n4.
لتنظيم سرعة الدوران عن طريق تغيير الجهد عند أطراف عضو الإنتاج، من الضروري أن يكون لديك مصدر جهد قوي قابل للتعديل نسبيًا. تتوافق كل قيمة جهد مع خاصية ميكانيكية صناعية للمحرك، تظهر إحداها في الصورة 2(خاصية 3). باستخدام الخاصية 3 عند عزم دوران معين M1، يمكن الحصول على سرعة الدوران n3.
فهرس
1. كاتسمان م.م. سيارات كهربائية. -م: أعلى. المدرسة، 1993.
2. كوبيلوف آي.بي. سيارات كهربائية. -م: الطاقة الذرية، 1986
إذا كان ملف المجال وعضو المحرك متصلين بشبكة تيار مستمر بجهد U، فسيحدث عزم كهرومغناطيسي M. عزم الدوران المفيد M على عمود المحرك أقل من عزم الدوران الكهرومغناطيسي بقيمة عزم الدوران المعاكس الناتج في الماكينة بواسطة قوى الاحتكاك ويساوي عزم الدوران M x في وضع الخمول، أي M = M em -M x.
ابتداء من عزم الدورانيجب أن يكون المحرك أكبر من قوة الكبح الثابتة عندما يكون الدوار في حالة سكون، وإلا فلن يبدأ المحرك في الدوران. في حالة مستقرة (في ن = const) يوجد توازن بين لحظات الدوران M والكبح M t:
م = م م – م س = م ر (8)
من المعروف من الميكانيكا أن القوة الميكانيكية للمحرك يمكن التعبير عنها بدلالة عزم الدوران والسرعة الزاوية
لذلك، يتم التعبير عن عزم الدوران المفيد للمحرك M (N m)، من خلال القوة المفيدة P (kW) وسرعة الدوران n (rpm)،
م = 9550 ف / ن (10)
دعونا نناقش بعض أسئلة مهمةبدء وتشغيل محركات التيار المستمر. من مكافئ. الحالة الكهربائيةالمحرك يتبع ذلك
أنا أنا = (U - E)/R أنا (11)
في وضع التشغيل، يكون تيار عضو الإنتاج I I محدودًا بـ e. د.س. E، إذا كانت n تساوي تقريبًا n nom. في لحظة بدء التشغيل n = 0، e. د.س. E = 0 وبدء التشغيل I p = U/R i أكبر بـ 10-30 مرة من التيار المقنن. لذلك، فإن التشغيل المباشر للمحرك، أي التوصيل المباشر لعضو الإنتاج بجهد التيار الكهربائي، أمر غير مقبول. للحد من تيار البدء الكبير لعضو الإنتاج، قبل البدء، يتم تشغيل مقاومة متغيرة R p بمقاومة صغيرة بالتتابع مع عضو الإنتاج. في هذه الحالة، عندما E = O
أنا ع = U/(ص أنا – ص ص)<< U/R я (12)
يتم تحديد مقاومة المقاومة المتغيرة Rп بناءً على تيار عضو الإنتاج المسموح به.
عندما يتسارع المحرك إلى السرعة المقدرة، ه. د.س. يزداد E، ويتناقص التيار، وتتم إزالة مقاومة متغيرة البداية تدريجيًا وكاملًا (تم تصميم مقاومة متغيرة البداية للتنشيط على المدى القصير). تتم إزالة منظم مقاومة متغيرة R في دائرة الإثارة بمقاومة عالية نسبيًا (عشرات ومئات الأوم) تمامًا قبل بدء تشغيل المحرك، بحيث يكون تيار الإثارة والتدفق المغناطيسي للجزء الثابت F اسميًا عند بدء التشغيل. ويؤدي ذلك إلى زيادة عزم الدوران، مما يضمن تسارعًا سريعًا وسهلاً للمحرك.
بعد بدء التشغيل والتسارع، تبدأ حالة ثابتة من تشغيل المحرك، حيث سيتم موازنة عزم دوران الكبح على العمود Mt مع عزم الدوران الناتج عن المحرك. , أي م م == م ر (في ن = مقدار ثابت.)
يمكن للمحركات الكهربائية التي تعمل بالتيار المستمر أن تستعيد حالة التشغيل المستقرة التي تعطلت بسبب التغير في عزم الكبح، أي أنها يمكنها تطوير عزم الدوران M , تساوي القيمة الجديدة لعزم دوران الكبح M t عند سرعة دوران جديدة مقابلة n" .
في الواقع، إذا تبين أن عزم دوران الكبح للحمل Mt أكبر من عزم دوران المحرك M، فسوف تنخفض سرعة دوران عضو الإنتاج. عند الجهد الثابت U والتدفق Ф، سيؤدي هذا إلى انخفاض في e. د.س. E عضو الإنتاج، زيادة في تيار عضو الإنتاج وعزم الدوران حتى يحدث التوازن، حيث M em = M t و n"
تنظيم التردد
يتم تحديد تردد دوران محرك التيار المستمر بناءً على معادلة الحالة الكهربائية U = E + R I I I بعد استبدال e بها. د.س. ه = سن:
 (13)
(13)
انخفاض الجهد في عضو الإنتاج R I I I صغير: عند الحمل المقدر لا يتجاوز 0.03 - 0.07 U nom.
وبالتالي، فإن سرعة دوران محرك التيار المستمر تتناسب طرديًا مع جهد الخط المطبق وتتناسب عكسيًا مع التدفق المغناطيسي للجزء الثابت . يترتب على المعادلة (13) أنه يمكن تعديل سرعة المحرك بطريقتين: عن طريق تغيير تدفق الجزء الثابت F أو الجهد U الموفر للمحرك. يتم التحكم في سرعة الدوران عن طريق تغيير المجال المغناطيسي للآلة باستخدام مقاومة متغيرة في دائرة إثارة المحرك. يتم تغيير الجهد المورد للمحرك عن طريق تنظيم جهد المصدر.
يمكنك إدخال مقاومة متغيرة إضافية في دائرة عضو الإنتاج. في هذه الحالة، يتم استبدال مقاومة متغيرة البداية بالصابورة، حيث تؤدي هذه المقاومة المتغيرة وظائف كل من مقاومة متغيرة البداية ومتغير التحكم. المعادلة (13) لها النموذج
 (14)
(14)
ويترتب على ذلك أنه يمكن التحكم في سرعة المحرك عن طريق تغيير جهد التيار الكهربائي أو مقاومة مقاومة متغيرة الصابورة أو تدفق الجزء الثابت.
عكس المحركات. من معادلة عزم دوران المحرك M em = kФI i يترتب على ذلك أن الانعكاس، أي تغيير اتجاه دوران عضو الإنتاج، يمكن أن يتم عن طريق تغيير اتجاه التيار في ملف المجال (التدفق F) أو تيار عضو الإنتاج.
لعكس المحرك "أثناء الطيران"، يتم تغيير اتجاه تيار عضو الإنتاج (عن طريق تبديل أطراف عضو الإنتاج)، ولكن لا يتم تبديل ملف المجال، لأنه يحتوي على محاثة عالية ومن غير المقبول كسر دائرته بالتيار. يتم أيضًا عكس اتجاه المحرك المغلق عن طريق تغيير اتجاه التيار في ملف المجال (تبديل أطرافه).
يمكن أن يكون لمحركات التيار المستمر إثارة مستقلة أو متوازية أو متتالية أو مختلطة (الشكل 6.1).
أرز. 6.1. دوائر المحركات الكهربائية المستقلة ( أ),
موازي ( ب) ، تسلسلي ( الخامس) ومختلط ( ز) الإثارة
(الجزء العلوي من المخطط "ج" ينتمي إلى المخطط "أ")
في محرك الإثارة المتوازي، يتم توصيل ملف المجال بالتوازي مع أطراف عضو الإنتاج. لكن التيار المتدفق عبر هذا الملف، على عكس تيار عضو الإنتاج، لا يعتمد على الحمل ويتم تحديده من خلال الجهد المطبق على عضو الإنتاج والمقاومة الإجمالية لدائرة الإثارة. لهذا السبب، يسمى المحرك الكهربائي المتوازي أيضًا محركًا كهربائيًا متحمسًا بشكل منفصل.
عزم الدوران ممحرك DC و EMF الخاص به هتحددها الصيغ
م= إلى ف أناأنا؛ ه= ك،
حيث k هو المعامل التصميمي للمحرك؛
Ф – التدفق المغناطيسي، Wb؛
أنا I هو تيار عضو الإنتاج، A.
ω – السرعة الزاوية، rad/s.
المعادلات الكهروميكانيكية ω = ƒ ( أناأنا) والميكانيكية ω = ƒ ( م) الخصائص لها الشكل
ω = ش/(كيلو فهرنهايت) – ( رأنا + رع) / (ك ف) أناأنا؛
ω = ش/(كيلو فهرنهايت) – ( رأنا + رع) / (إلى 2 ف 2) م.
السرعة الزاوية لسرعة الخمول المثالية (عند أناأنا = 0 أو م = 0)
ω 0 = ش/(كيلو فهرنهايت).
في التين. يعرض الشكل 6.2 الخصائص الميكانيكية لمحرك التيار المباشر مع الإثارة المستقلة (DC NV) في جميع أوضاع التشغيل. النقاط المميزة للخصائص في وضع المحرك هي: نقطة الخمول المثالية (ω 0، م= 0)؛ نقطة الوضع الاسمي (ω n، من)؛ نقطة ماس كهربائى (ω = 0, م = مل).
يتم تحديد صلابة الخاصية الميكانيكية من خلال تدفق الإثارة ومقاومة دائرة المحرك:
ب = د م/dω = - إلى 2 Ф 2 / ( رأنا + رع) = - مك/ω.
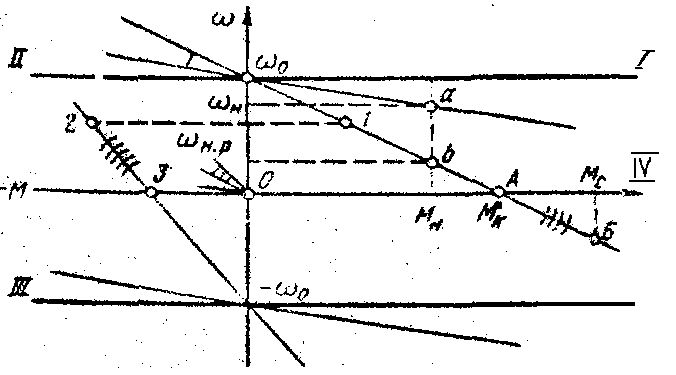
أرز. 6.2. الخصائص الميكانيكية المجمعة لمحرك DC مع الإثارة المستقلة
تتوافق أعلى قيمة لمعامل الصلابة مع الخاصية الميكانيكية الطبيعية، حيث أن تيار الإثارة يساوي المقاومة الاسمية ومقاومة التعديل رع = 0. مع زيادة مقاومة الريوستات ر p يزداد ميل الخاصية الميكانيكية وتقل السرعة الزاوية. عند قيمة مقاومة معينة ر p وعزم الدوران الاسمي م n السرعة الزاوية للمحرك
ω ن.ر = ω 0 (1 – أنان ( رأنا + رص) / شن.
لحساب الخصائص الميكانيكية، من الضروري معرفة مقاومة عضو المحرك رط، وهو محدد في الفهارس. في حالة عدم وجود بيانات المصنع، القيمة رأجد ذلك تقريبًا باستخدام الصيغة
رط = 0.5 (1 – ŋ ن) ( شن/ أنان).
نظرًا لأن الخصائص الميكانيكية لـ DPT NV واضحة ومباشرة، يكفي أن تحتوي على نقطتين لبنائها:
1) ω = ω 0 و م = 0,
2) ω = ω n (أو ω = ω n.r.) و م = من.
بالنسبة إلى DPT NV، تتوفر الأوضاع الثلاثة التالية للفرملة الكهربائية.
1. التجدد الكبحوالذي يحدث عندما تكون سرعة المحرك أعلى من سرعة التباطؤ المثالية. إنه الأكثر اقتصادا، حيث يتم نقل طاقة الكبح إلى الشبكة الكهربائية. الخصائص الميكانيكية في هذا الوضع هي استمرار للخصائص المقابلة لوضع المحرك في الربع الثاني. لا تتغير دائرة المحرك أثناء الكبح المتجدد.
2. الكبح الديناميكي. يتم فصل المحرك المحرك عن الشبكة وقصر المقاومة. في هذه الحالة، يتم تحويل الطاقة الميكانيكية للأجزاء المتحركة (الآلية وعضو المحرك) إلى طاقة كهربائية، والتي تُفقد على شكل طاقة حرارية في مقاومة دائرة عضو الإنتاج. تمر الخصائص الميكانيكية في وضع الكبح هذا عبر أصل الإحداثيات (في الشكل 6.2 - خطوط ذات ثلاث درجات).
3. الكبح الخلفيتتم بطريقتين:
1) إدخال مقاومة كبيرة في دائرة المحرك.في هذه الحالة يصبح عزم المحرك أقل من عزم الحمل الساكن ممع. يتوقف المحرك (عند النقطة أ) ثم تحت تأثير عزم الدوران ميبدأ c بالتدوير في اتجاه مختلف، مما يؤدي إلى تطوير عزم الكبح؛ عند النقطة B، تحدث حالة مستقرة. الخصائص الميكانيكية هي استمرار للخصائص المقابلة لوضع المحرك (في الشكل 6.2 - خطوط بأربع درجات)؛
2) الكبح عن طريق تبديل قطبية ملف المحرك على طول الطريق. المحرك يعمل عند النقطة 1 ، بعد التبديل سوف يتحول إلى الخاصية المتغيرة عند هذه النقطة 2. على طول الخط 2–3 يحدث الكبح (خط بخمس علامات). عند هذه النقطة 3 يتوقف المحرك ويجب فصله عن التيار الكهربائي لتجنب التبديل إلى وضع المحرك مع الدوران في الاتجاه المعاكس.
في محرك DC متحمس على التواليدي نيمتيار المحرك هو أيضا تيار الإثارة. يزداد التدفق المغناطيسي المثير مع زيادة الحمل، ونتيجة لذلك تنخفض السرعة الزاوية وفقًا للمعادلة (6.1) وستكون الخصائص الميكانيكية للمحرك ناعمة (الشكل 6.3). بفضل هذا، يتغلب NV DPT على الأحمال الزائدة بسهولة وسلاسة نسبيًا وله عزم دوران مرتفع. تسمح خصائص المحرك هذه باستخدامه على نطاق واسع في قيادة آليات النقل. يتم تخفيف الخصائص الميكانيكية للمحرك بشكل كبير عند إدخال مقاومة متغيرة في دائرة عضو الإنتاج (الشكل 6.3، خطوط ذات درجة واحدة).
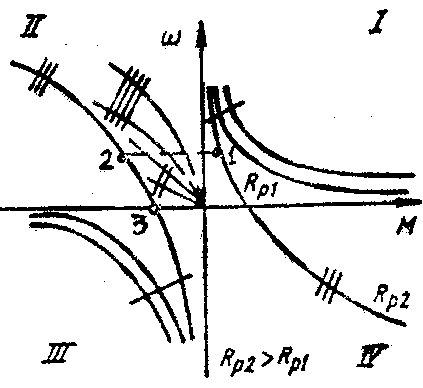
أرز. 6.3. الخصائص الميكانيكية للمحرك DC
مع الإثارة المتتابعة
مع DPT PV، لا يمكن تنفيذ وضع الكبح المتجدد، لأنه لا يتمتع بسرعة تباطؤ مثالية.
الكبح الديناميكي يمكن تنفيذها وفقًا لمخطط مع الإثارة الذاتية والإثارة المستقلة. في الحالة الأولى، يتم فصل عضو الإنتاج والملف الميداني عن الشبكة وإغلاقهما أمام المتغير. ل تجنب إزالة المغناطيسية الجهاز، من الضروري تبديل ملف المجال (أو عضو الإنتاج) بحيث لا يتغير اتجاه التيار في ملف المجال. في هذه الحالة، تقوم الآلة بالإثارة الذاتية لمقاومة معينة لدائرة عضو الإنتاج فقط عند قيمة معينة للسرعة الزاوية؛ عند الإثارة، فإنه يخلق عزم دوران الكبح. الخصائص الميكانيكية غير خطية (في الشكل 6.3 توجد منحنيات بأربع درجات).
تتشابه الخصائص الميكانيكية للمحرك في وضع الكبح الديناميكي مع الإثارة المستقلة مع الخصائص المقابلة للمحرك مع الإثارة المستقلة (في الشكل 6.3 - خطوط ذات درجتين). تُستخدم طريقة الكبح هذه على نطاق واسع، ولكن نادرًا ما يتم استخدام الطريقة الأولى، وذلك بشكل أساسي كوسيلة للطوارئ، على سبيل المثال، عند اختفاء جهد التيار الكهربائي.
يتم تنفيذ الكبح عن طريق التبديل المعاكس، كما هو الحال في DPT NV، بطريقتين:
1) إدراج مقاومة عالية في دائرة عضو الإنتاج؛
2) تغيير قطبية ملف المحرك، مع ترك اتجاه التيار في ملف المجال دون تغيير.
مع الطريقة الأولى، ستكون الخاصية الميكانيكية استمرارًا للخاصية المقابلة لوضع المحرك (في الشكل 6.3 يوجد خط بثلاث درجات). في الطريقة الثانية، يتم الكبح على طول الخط 1 –2–3 .
تنظيم سرعة المحركات الكهربائية ذات التيار المستمر.يمكن تعديل سرعة DPT NV:
1) عن طريق تغيير المقاومة في دائرة عضو الإنتاج؛
2) تغيير تدفق الإثارة.
3) تغيير الجهد الموردة إلى حديد التسليح.
أنظمة وفقا للطريقة الأولىله عيوب كبيرة:
- تتناقص صلابة الخصائص الميكانيكية مع انخفاض السرعة الزاوية، وزيادة فقدان الطاقة في الدائرة الرئيسية؛
- نطاق التحكم محدود، خاصة عند الأحمال المنخفضة؛
– سلاسة ودقة التنظيم منخفضة.
لهذه الأسباب، نادرًا ما يتم استخدام طريقة التحكم هذه في محرك أقراص DC.
بواسطة الطريقة الثانيةمن الممكن تنظيم التدفق المغناطيسي فقط في اتجاه الانخفاض (نظرًا لأن الدائرة المغناطيسية للمحرك مشبعة في الوضع الاسمي) ، وهو ما يتوافق مع زيادة في السرعة فوق القيمة الاسمية. لا يتجاوز نطاق التحكم في السرعة الممكن 2 للمحرك القياسي. يقتصر الحد الأعلى للسرعة على القوة الميكانيكية لعناصر عضو المحرك - أشرطة لف عضو الإنتاج والمبدل.
الطريقة الرئيسية لتنظيم سرعة NV DC هي طريقة تعتمد على تغيير الجهد المزود إلى عضو الإنتاج، والذي يتم تنفيذه باستخدام محول خاص قابل للتعديل. تستخدم محولات الثايرستور بشكل أساسي كمصادر طاقة فردية. إن صلابة الخصائص الميكانيكية للمحرك في نظام "المحول – DPT NV" تكون ثابتة تقريبًا. الخصائص الميكانيكية هي عائلة من الخطوط المستقيمة المتوازية مع بعضها البعض. نطاق التنظيم ونعومته ودقته أعلى هنا منه في طرق التحكم الأخرى. لذلك، يتم استخدام نظام القيادة هذا للآليات التي تتطلب تحكمًا عميقًا وسلسًا في السرعة.
حساب المقاومات الإضافية في دائرة عضو الإنتاج لـ DPT NV.إذا كانت الخاصية الكهروميكانيكية أو الميكانيكية الطبيعية معروفة 1 المحرك (الشكل 6.4) وبيانات جواز السفر الخاص به، ثم احسب المقاومة رد، عندما يتم تضمينها في دائرة عضو الإنتاج، فإن الخاصية الاصطناعية المطلوبة 2 سوف يمر عبر النقطة A بإحداثيات معينة ω و، أنايمكن إجراء و أو ω و M و باستخدام الطرق التالية الأكثر شيوعًا.
أرز. 6.4. خصائص DPT NV لحساب القيمة
مقاومات التعديل
طريقة النسبة. دعونا نكتب نسبة انخفاض السرعة مع التيار أناو أو لحظة موعلى Δω e الطبيعية والصناعية المرغوبة وخصائصها:
Δω ه / Δω ش = أناو رأنا / ( أناو ( رأنا + رد)) = رأنا / ( رأنا + رد).
ثم الكمية المطلوبة
رد = رط (Δω و / Δω ه – 1).
طريقة القطاعلا يتطلب معرفة قيمة المقاومة الخاصة بالمحرك رأنا (علاوة على ذلك، يمكن تحديد قيمتها من خلال خاصية طبيعية معروفة).
دعونا نكتب التعبير عن سرعة المحرك عند خاصية صناعية معينة (انظر الشكل 6.4) عند التيار المقنن أنان، لحظة م n، التدفق المغناطيسي Fn والجهد شن:
ω و = شن / (كف ن) (1 – أنان ر/ شن)،
أين ش n / (kF n) = ω 0 .
ω و = ω 0 (1 – ر / رن).
هنا رن = شن/ أنان - ما يسمى بالمقاومة الاسمية، وهي القيمة الأساسية لحسابات أوم.
نسبة
ر / شن = (ω 0 – ω ش) / ω 0 = δ
يعكس خاصية مهمة لـ NV DPT: فرق السرعة النسبي δ = Δω / ω 0 يساوي المقاومة النشطة النسبية لدائرة عضو الإنتاج ر / رن.
دعونا نشير في الشكل. 6.4 النقاط المميزة أ, ب,مع, دولاحظ أن ω 0 – ω و= Δω = تيار متردد, ω 0 = إعلان.ثم ر = رن Δω / ω 0 = رن تيار متردد/إعلان; رد = رن بمع/إعلان; رأنا = رن أب /إعلان.
وهكذا تجد رد يجب عليك أولاً تحديد أطوال المقاطع بناءً على خصائصها بمعو إعلانعند التيار المقنن أو عزم الدوران وحساب المقاومة المقدرة رن = شن/ أنان.
يمكن أيضًا إجراء حساب المقاومات الإضافية باستخدام الصيغ التالية لتيار مسموح به أناإضافية، والتي تحددها قيمة اللحظة المسموح بها مظروف إضافية أو البدء والعكس والكبح.
مقاومة المقاوم ر d1 في البداية ( ه = 0)
رد1 = ( ش / أناإضافي) - رأنا.
مقاومة المقاوم R d2 أثناء الكبح الديناميكي
رد2 = ( ه / أناإضافي) - رأنا ≈ ( ش / أناإضافي) - رأنا).
مقاومة المقاوم ر D3 أثناء الكبح العكسي أو المضاد
رد3 = (( ش + ه) / أناإضافي) - رأنا ≈ (2 ش / أناإضافي) - رأنا.
مثال . يحتوي نوع DPT NV PBST-53 على بيانات جواز السفر التالية: رن = 4.8 كيلو واط؛ نن = 1500 دورة في الدقيقة؛ شن = 220 فولت؛ أنان = 24.2 أ؛ رط = 0.38 أوم؛ أنا v.n = 0.8 A. مطلوب تحديد:
1) مقاومة المقاوم، والتي سيضمن إدراجها في دائرة المحرك المحرك مرور خاصية ميكانيكية اصطناعية عبر نقطة ذات إحداثيات ω و = 90 راد/ثانية، من = 25 نيوتنم؛
2) مقاومة المقاومات التي سيؤدي إدراجها إلى الحد من التيار أثناء التشغيل والكبح عن طريق التبديل الخلفي إلى المستوى أنااضافية = 3 أنان.
في جهاز التيار المستمر، يكون لملف عضو الإنتاج مقاومة منخفضة، وعند توصيله بالشبكة، تنشأ تيارات تدفق، والتي يمكن أن تصل إلى 15...20I. تؤدي الزيادة في تيارات عضو الإنتاج فوق قيمة 2...2.5I إلى تدهور عملية التخفيف.
بالإضافة إلى ذلك، يمكن للقوى الديناميكية الناتجة أن تدمر تدريجيًا ملف عضو الإنتاج، وتتسبب في قص المفاتيح، ولف الأعمدة، وما إلى ذلك. يتم تحديد تيارات البداية باستخدام المقاومات r 1، r 2، r 3، المضمنة في دائرة عضو الإنتاج (الشكل 2.12). ومع تسارع المحرك، يزداد المجال الكهرومغناطيسي (EMF) ويتناقص التيار. من خلال تقصير المقاومة بالتتابع مع جهات الاتصال KM1، KM2، KMZ، يتم تنفيذ بدء التشغيل. يظهر مخطط بدء تشغيل المحرك في الشكل. 2.13.

أرز. 2.13. مخطط الدائرة لمقاومات البداية
يتم تحديد قيم تبديل التيارات I 1 و I 2 بناءً على المتطلبات التقنية للمحرك الكهربائي وقدرة التبديل للمحرك. لذلك، خذ I 1 = (2.0...2.5)I N وI 2 = (1.2...1.3)I N في الحالات التي تؤثر فيها مدة بدء تشغيل المحرك على أداء الآلة التي يتم تشغيلها بشكل متكرر.
إذا كانت البداية الناعمة مطلوبة، على سبيل المثال، لمصاعد الركاب، فسيتم تحديد قيم تيارات التبديل من خلال التسارع المسموح به للمحرك الكهربائي. في الحالات التي يكون فيها بدء التشغيل نادرًا وشروط بدء التشغيل غير محدودة، يمكن أخذ قيم التيارات I 1 و I 2 أكبر قليلاً من تيارات التشغيل (ولكنها أقل بكثير مما كانت عليه في الحالة الأولى، عندما I 1 = (2...2.5)I N.
يتم حساب قيم مقاومة البداية بالطرق التحليلية والرسومية. إذا تم تحديد عدد الخطوات، فهذا يعني أنه تم إجراء الحساب للوحة موصلات قياسية معروفة بالفعل. إذا كان عدد الخطوات غير معروف، فأنت بحاجة إلى التحديد
طريقة تحليلية لحساب مقاومات البداية
عندما يكون المحرك متصلا بالشبكة، يبدأ التسارع بمقاومة البداية R 3 = r I + r 1 + r 2 + r 3 (الشكل 2.13). تتوافق هذه المقاومات مع خاصية كهروميكانيكية صناعية
1 - 2 - ω 0 (الشكل 2.14). عند التيار I 2 والسرعة ω 2 (النقطة 2)، يتم تحويل المقاومة الإضافية r 3 بواسطة جهات اتصال KMZ، ويزداد تيار المحرك مرة أخرى إلى I 1 (النقطة 3). تستمر البداية بالمقاومة R 3 = r I + r 1 + r 2 حسب الخاصية 3 - 4 - ω o. عند النقطة 4 من هذه الخاصية، يتم إيقاف تشغيل r 2 عن طريق الاتصال KM2. بالمقاومة
R 3 = r I + r 1 يتسارع المحرك حسب الخاصية 5 – 6 - ω o. عند السرعة ω 6 (النقطة 6)، يتم إيقاف المقاومة الأخيرة r 1، ويصل المحرك إلى الخاصية الكهروميكانيكية الطبيعية 7 - 8 - ω o، والتي من خلالها يتسارع إلى سرعة الدوران المقابلة للحمل على العمود.
لتحديد قيم المقاومات الإضافية، نأخذ نسبة التيارات المقابلة للنقطتين 3 و 2 عند السرعة الزاوية ω 2 في مخطط البداية:
![]() . (2.31)
. (2.31)

أرز. 2.14. رسم تخطيطي لبدء DPT NV.
قيم المحرك EMF عند هذه النقاط متساوية، حيث أن سرعة الدوران ω 2 لا تتغير
بعد تخفيض الجهد نحصل على :
![]() .
.
عند السرعة الزاوية ω 4 للنقاط 4-5 نكتب:
![]() ;
;
هنا E 4 = E 5، والتيارات I 5 = I 1، I 4 = I 2، وبالتالي:
![]() .
.
وبالمثل بالنسبة للسرعة الزاوية ω 6 (النقطتان 6 و 7):
![]()
أو ![]() .
.
دعونا نشير إلى نسبة تبديل التيارات: إذن
إذا كانت هناك خطوات م، فبالقياس:
في هذا التعبير، فإن عدد مراحل البدء m وتعدد تيارات البداية مترابطان:
![]() (2.34) أو . (2.35)
(2.34) أو . (2.35)
ويمكن تحديد قيمة المقاومة لكل مرحلة على النحو التالي:
الإجراء لحساب مقاومة البداية
إذا تم تحديد عدد المراحل m، فسيتم حساب المقاومات على النحو التالي:
1) قمنا بتعيين قيمة التيار I 1 وتحديد R m:
2) ابحث عن نسبة تبديل التيارات:
![]() , (2.37)
, (2.37)
أين ؛ R n، U n، I n، η n - بيانات تصنيف المحرك؛
3) احسب قيمة تيار التحويل الثاني I 2:
ومقارنتها مع تيار التشغيل للمحرك I s، الذي يتوافق مع الحد الأقصى لعزم دوران آلة العمل عند بدء التشغيل.
إذا كان عزم الدوران M s معروفًا، إذن
![]() ,
,
وإذا تم إعطاء الطاقة الموجودة على عمود آلة العمل P V.r.m. ، الذي - التي
![]() .
.
عندما I 2> (1.1...1.2)I c نحدد مقاومة كل مرحلة:
...![]() . (2.38)
. (2.38)
إذا لم يتم استيفاء الشرط I 2 > 1.1I c، فاختر شرطًا جديدًا
(أكبر) قيمة I 1 وكرر العملية الحسابية.
إذا كان عدد مراحل المقاومة غير معروف، فسيتم الحساب بالتسلسل التالي:
1) نقوم بضبط قيم تيارات التبديل I 1، I 2 وتحديد π:
2) تحديد عدد الخطوات:
أين ؛ ![]() .
.
يتم تقريب القيمة الناتجة m (إذا كانت كسرية) إلى
أقرب عدد صحيح وصقل α والتيار I 2:
![]() ; .
; .
يتم إجراء مزيد من الحسابات كما في الحالة الأولى. بعد الانتهاء من الحسابات للخيار الأول أو الثاني، من الضروري التحقق من صحة الحسابات. للقيام بذلك، نحدد المجموع
مقاومة:
ومقارنتها بالأصل. يجب أن يكون الانحراف في الحسابات ضمن الخطأ المسموح به - 5...7%.
طريقة رسومية لحساب مقاومات البداية
تعطي طريقة الحساب هذه فكرة واضحة عن قيم المقاومات الإضافية، ولكن لها عيبًا كبيرًا -
تعتمد دقة الحسابات على دقة مخطط بدء تشغيل المحرك.
الخصائص الكهروميكانيكية لمحرك DC مع مقاومة إضافية R ext متضمنة في دائرة عضو الإنتاج. تظهر في الشكل. 2.15.

الشكل 2.15. الخصائص الكهروميكانيكية لـ DPT NV عند إدخال مقاومات إضافية في دائرة عضو الإنتاج.
معادلة EMF للسرعة الحالية والدورانية المقدرة ω
(النقطة ج):
دعونا نقسم التعبير الأخير على sf n:
![]() . (2.39)
. (2.39)
من الشكل 2.15 لدينا:
 (2.40)
(2.40)
بمقارنة التعبيرين (2.39) و (2.40) نكتب:
لذلك، بالنسبة للقيم الثابتة لـ I n وsF n، فإن قيمة القطعة ab تتناسب مع . إذا كانت الخاصية تمر عبر النقطة r , ثم يتم موازنة كل شيء مطبق U بالسقوط
المقاومة ر:
يتم استدعاء Rn المقاومة المقدرة,![]() . المقاومة الاسمية للمحرك الكهربائي - هفهذه هي مقاومة دائرة عضو الإنتاج التي يتدفق فيها التيار المقدر في ملف عضو الإنتاج في لحظة التشغيل (عند ω = 0). المقطع a يتناسب مع R n . وبالتالي، بناءً على قيمة الجزء المقطوع بواسطة الخاصية الموجودة على خط التيار المقنن، فمن الممكن حساب مقاومة دائرة عضو الإنتاج. ولكن لهذا عليك أن تعرف المقياس
. المقاومة الاسمية للمحرك الكهربائي - هفهذه هي مقاومة دائرة عضو الإنتاج التي يتدفق فيها التيار المقدر في ملف عضو الإنتاج في لحظة التشغيل (عند ω = 0). المقطع a يتناسب مع R n . وبالتالي، بناءً على قيمة الجزء المقطوع بواسطة الخاصية الموجودة على خط التيار المقنن، فمن الممكن حساب مقاومة دائرة عضو الإنتاج. ولكن لهذا عليك أن تعرف المقياس
المقاومات:
أين ؛ U n، I n، R n، - الجهد المقنن والتيار وقوة المحرك.
الطريقة الأولى لتحديد المقياس هي الأكثر دقة، منذ ذلك الحين
القطعة ag أكبر من القطعة ab.
عند حساب مقاومة البداية لمحرك DC باستخدام الطريقة الرسومية، هناك خياران ممكنان.
1. يتم إعطاء عدد مراحل البداية م.
باستخدام بيانات جواز الآلة نقوم ببناء خاصية كهروميكانيكية طبيعية تعتمد على نقطتين (ω o, M = 0) و (I n, ω n)
(الشكل 2.16). نضع جانباً قيم تيارات التبديل I 1 و I 2.
يجب تبرير قيمها بناءً على المتطلبات التكنولوجية للمحرك الكهربائي وقدرة التبديل للمحرك. نحن نأخذ القيمة الحدية للتيار I 1 وتساوي (2...2.5)I n. الحالي أنا 2 = (1.2...1.3)أنا ن. من خلال النقاط المقابلة لقيمتي I 1 و I 2 على محور التيار نرسم خطين مستقيمين موازيين لمحور تردد الدوران. نقوم بتوصيل النقطتين 1 و ω o بخط مستقيم يتقاطع عند النقطة 2 مع التيار I 2.
الترتيب الإضافي للبناء هو من النقطة 2 إلى 3، وما إلى ذلك. مرئي من الشكل. 2.16. نتيجة للبناء، من الضروري الوصول إلى نقطة تقاطع الخاصية الكهروميكانيكية الطبيعية وخط التبديل الحالي I 1 (النقطة 7). إذا لم تنجح المباراة أو كان عدد الأقدام لا يساوي العدد المحدد، فمن الضروري تغيير قيمة التيار I 2 أو I 1 وتكرار البناء.

أرز. 2.16. طريقة رسومية لحساب مقاومات البداية
وهكذا تتم عملية تشغيل المحرك على عدة مراحل، كما هو موضح في الشكل. 2.16، يتميز بأن تيار المحرك أثناء البدء يتراوح من . في بداية البداية، مع تسارع المحرك، يزداد المجال الكهرومغناطيسي الخاص به، ونتيجة لذلك يبدأ التيار في دائرة المحرك بالانخفاض، وبالتالي عزم دوران المحرك. عندما يصل التيار، يتم إيقاف تشغيل جزء من مقاومة البداية بحيث يصل تيار المحرك إلى القيمة مرة أخرى، وما إلى ذلك.
ومع إزالة مقاومات البداية، تقل مقاومة دائرة عضو الإنتاج، وبالتالي تنخفض قيمة الثابت الكهروميكانيكي، مما يؤدي إلى انخفاض مدة البدء في كل مرحلة لاحقة.
























