كما هو موضح سابقًا ، تتمثل مهمة التحكم الأكثر شيوعًا في الحفاظ على قوانين التغيير المحددة في وقت معلمات الكائن (التنظيم). يسمى الجهاز الذي يقوم بإجراء التحكم "المنظم". تشمل الهيئات التنظيمية روابط ديناميكية بسيطة ، تجمع بين تحقيق الخصائص المؤقتة المطلوبة لنظام التحكم في ظل التأثيرات العشوائية وتغييرات الحمل. في هذه الحالة ، تكون معلمة الإدخال لوحدة التحكم مؤشرًا واحدًا أو عدة مؤشرات لعملية الكائن:
اعتمادًا على كيفية تشكيل إجراء التحكم ، يتم تمييز قوانين التحكم والهيئات التنظيمية المقابلة لها:
الترحيل ، تحقيق قانون تحكم غير خطي ثنائي الوظيفة
متناسب (ثابت ، أو أجهزة ردود الفعل الصعبة)
أجهزة متكاملة (ثابتة ، حلقة مفتوحة)
تكامل متناسب (متساوي ، أو أجهزة ذات ملاحظات متلاشية)
المشتق النسبي (الأجهزة الثابتة مع الترقب)
تفاضل تكاملي متناسب (أجهزة متساوية مع تقدم).
فيما يتعلق بالتركيبات مع محركات الاحتراق الداخلي ، يتم تطبيق قانون التحكم في الترحيل في أنظمة التحكم في الضغط والمستوى ، بمساعدة مرحل ثنائي الموضع ، يتم تشغيل المضخات والضواغط وإيقافها. لتجنب عمليات البدء والتوقف المتكررة للآليات ، يتم تعيين فاصل زمني معين بين قيم المعلمة الخاضعة للرقابة المقابلة للتبديل وإيقاف تشغيل المرحل (المنطقة الميتة).
يتم تنفيذ قوانين التحكم المتبقية بشكل رئيسي في أجهزة التحكم في السرعة.
يظهر جدول التنظيم وفقًا لقانون الترحيل في الشكل. 23.
تنتج وحدات التحكم النسبية إجراء تحكم في شكل اعتماد خطي على الانحراف عن انحراف المعلمة الخاضعة للرقابة:
حيث k p هو الكسب على القناة التنظيمية.
يظهر اعتماد إجراء التحكم على انحراف المعلمة الخاضعة للرقابة في الشكل 24.
نظرًا لأن موضعًا معينًا لجهاز التحكم في الحالة المستقرة يجب أن يتوافق مع حمولة معينة ، فمن المستحيل تنفيذ التنظيم على نطاق الحمل بأكمله دون حدوث خطأ معين ، يسمى تدلى المنظم:
تطبق الهيئات التنظيمية المتكاملة قانون إجراءات التحكم في شكل صيغة:
 ,
,
حيث T و هو وقت التكامل.
يمكن استخدام المنظم المتكامل كمفتاح حد ، والذي يحمي النظام من تجاوز حدود التسامح المحددة للانحراف المتحكم فيه في حالة حدوث عطل.
يجب أن توفر المنظمات ذات الوضع الكامل تغييرًا في القيمة الخاضعة للرقابة عبر النطاق الكامل للقيم المحددة ، بغض النظر عن الحمل. يستقبل الأفعى إشارة عبر قناة القياس من القيمة الفعلية للمعامل ومن خلال قناة جهاز الإعداد. لتحسين خصائص العملية العابرة عند تغيير الوضع أو أثناء التأثيرات العشوائية ، يتم إدخال رابط متكامل أو تفاضلي ، أو كلا الرابطين ، اللذين يعملان بالتناوب ، في أجهزة التحكم.
في وحدات التحكم التناسبية المتكاملة ، يتم وصف إجراء التحكم بالمعادلة:
 ,
,
حيث يحدد المصطلح الأول الجزء المتناسب ، والثاني - الجزء المتكامل.
في وحدات التحكم التناسبية التفاضلية ، يتم وصف إجراء التحكم بالمعادلة:
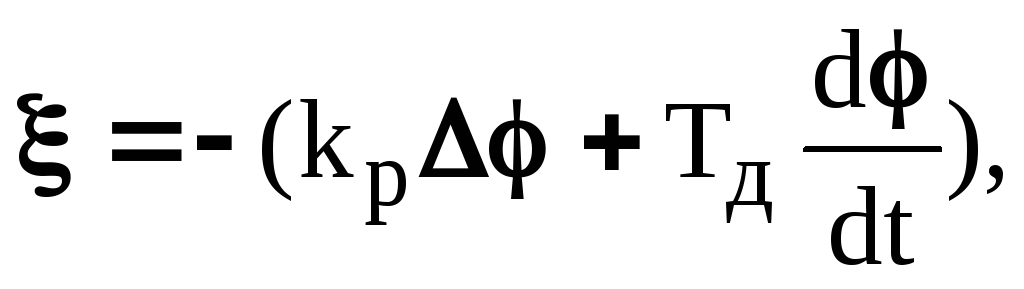
حيث T d هو وقت التمايز.
تتيح هذه الهيئات التنظيمية زيادة حجم إجراء التحكم مؤقتًا وتقليل الوقت المستغرق للوصول إلى حالة مستقرة جديدة.
في وحدات التحكم التناسبية التفاضلية المتكاملة ، يتم وصف إجراء التحكم بالمعادلة:
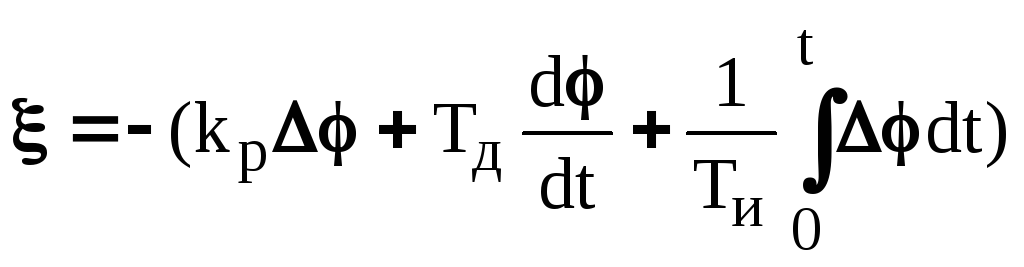
تتيح هذه الهيئات التنظيمية تحقيق أفضل أداء عابر من خلال تحقيق انحراف صفري للقيمة التي يتم التحكم فيها عن القيمة المحددة عبر نطاق التحميل بالكامل.
تم تنفيذ جميع أنواع المنظمين المدرجة في الأصل في الصناعة المحلية في شكل أجهزة ووحدات للنظام العالمي لعناصر الأتمتة الهوائية الصناعية (USEPPA). كان عيب هذه الأجهزة هو وجود ثقوب معايرة وقنوات ذات قطر صغير ، والتي يمكن أن تنسد بسبب الإعداد السيئ لوسط العمل (الهواء). حاليًا ، يتم استخدام المنظمين الإلكترونيين ، حيث يتم إجراء عمليات التمايز والتكامل باستخدام الدوائر الإلكترونية والمعالجات الدقيقة.
في السابق ، كانت هناك أنواع أخرى من تصنيف الهيئات التنظيمية.
وفقًا لطريقة تأثير الطاقة لجزء القياس من المنظم من جانبه التنفيذي ، يتم تقسيم المنظمين إلى فئتين: منظمات العمل المباشر وغير المباشر. يوضح الشكل 25 أ مخطط كتلة لنظام التحكم مع منظم يعمل مباشرة ، الشكل 25 ب - مع منظم غير مباشر.
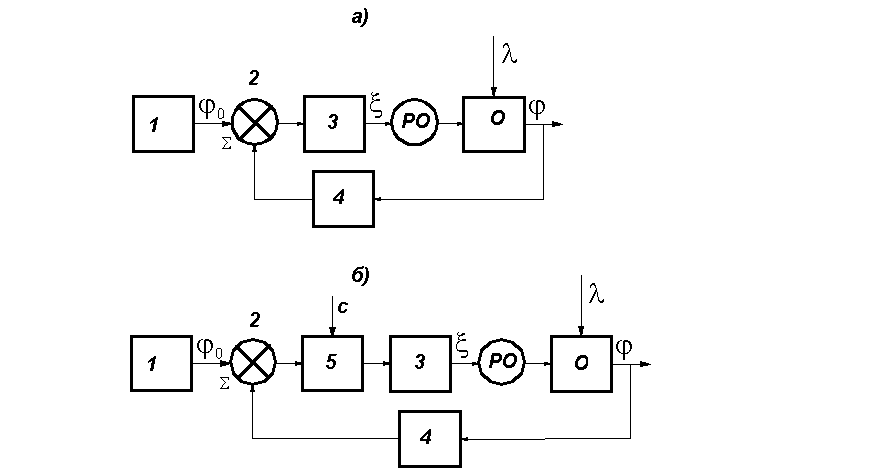
1 - عنصر المهمة ، 2 - عنصر المقارنة ، 3 - مشغل ، 4 - عنصر حساس ، 5 - مكبر للصوت ، RO - هيئة تنظيمية ، O - كائن
يتكون منظم الإجراء المباشر من جهاز قياس (بما في ذلك عنصر حساس 4 ، وعنصر مهمة 1 وعنصر مقارنة 2) ، ومشغل 4 يحرك الجسم المنظم في الاتجاه المطلوب. يجب أن يكون للمشغل ناتج محدد جيدًا (أو كما يطلق عليه عادة ، التقليب) قوة لتحريك التناضح العكسي. في منظم التمثيل المباشر ، يتم إنشاء قوة التعديل اللازمة بواسطة عنصر استشعار.
في حالة استحالة تصميم عنصر حساس مضغوط يطور القوة المطلوبة ، يتم إدخال مكبر 5 في تصميم المنظم ، والذي يستخدم طاقة خارجية إضافية (ج) لتضخيم قوة العداد. يسمى هذا المنظم بالمنظم غير المباشر.
تم تقسيم المنظمين إلى الفئات التالية وفقًا لطريقة ضمان مهمة التنظيم:
منظمات إستاتيكية
منظمات ثابتة
وحدات تحكم البرمجيات
اثنين من وحدات تحكم الموقف.
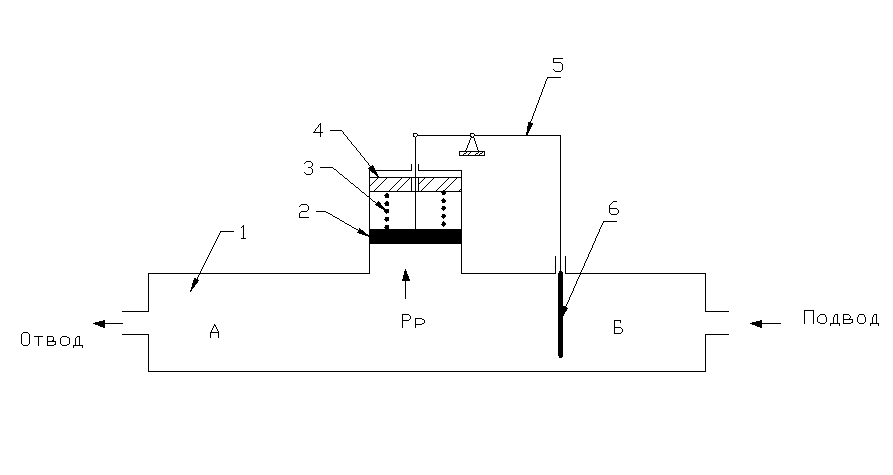
في أمثلة أبسط منظمات الضغط ، يمكن للمرء أن يفهم الاختلاف في تصميم المنظمين الساكنين والاستاتيكيين. على التين. يُظهر الشكل 26 منظم ضغط استاتيكي.
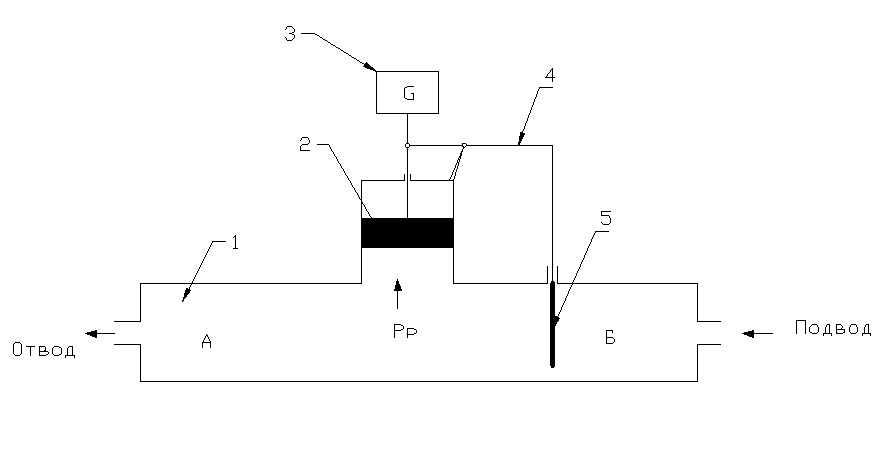
أرز. 26 منظم ضغط استاتيكي
1 - جسم قابل للتعديل ، 2 - مكبس (عنصر استشعار) ، 3 - تحميل (عنصر الضبط وعنصر المقارنة) ، 4 - ذراع ناقل الحركة (مشغل) ، 5 - بوابة (هيئة تنظيمية)
يوجد في تدفق الغاز جهاز تنظيم 5 بمقاومة متغيرة ، ونتيجة لذلك ، مع وجود ضغط متغير عند المدخل ، من الممكن الحفاظ على ضغط ثابت في التجويف أ. في وضع التوازن ، يوجد توازن بين عند تزويد الغاز وإزالته ، فإن الضغط في تجويف العمل A يتوافق مع القيمة المحسوبة P p ومتوازن بواسطة الحمل G. عندما يتغير الحمل (التراجع) ، يختل التوازن ، واعتمادًا على طبيعة التغيير ، يتناقص أو يزداد الضغط في التجويف A. ومع ذلك ، ليس من الممكن دائمًا الحصول على توازن مستقر جديد بدون تقلبات ثابتة. هو العيب الرئيسي للمنظمين الاستاتيكيه.
في منظم ثابت (الشكل 27) ، يكون عنصر المهمة هو دعامة الزنبرك العلوي 4 ، وعنصر المقارنة هو الزنبرك 3. يختلف مقدار القوة المؤثرة على المكبس من جانب الزنبرك اعتمادًا على موضع المكبس في ارتفاع. وبسبب هذا ، لا توجد واحدة ، كما في الحالة السابقة ، ولكن تنشأ مجموعة من حالات توازن الضغط. لذلك ، إذا بدأ الضغط P في الزيادة ، يمكن للمكبس ، الذي يرتفع ويضغط الزنبرك ، أن يتخذ موقعًا جديدًا ، حيث يتوافق الضغط المتزايد مع قوة الزنبرك المتزايدة. وبالتالي ، وحدة تحكم ثابتة مع وجود خطأ ثابت متعمد. ترتبط قيمة المعلمة المدعومة بشكل فريد بحجم الحمل.
أرز. 27 منظم ضغط ثابت
1 - جسم قابل للتعديل ، 2 - مكبس (عنصر استشعار) ، 3 - زنبرك (عنصر مقارنة) ، 4 - دعم نابض علوي (عنصر مقارنة) ، 5 - ذراع ناقل حركة (مشغل) ، 6 - بوابة (جسم تنظيمي)
توفر منظمات البرامج عنصرًا هيكليًا إضافيًا يغير تنسيق المهمة ، وبالتالي القيمة الخاضعة للرقابة ، وفقًا لاعتماد وظيفي معين على الحمل ، في الوقت المحدد أو على كميات أخرى.
في وحدات التحكم على التشغيل ، يتم تنفيذ قانون التحكم في الترحيل. تعمل الهيئات التنظيمية من هذا النوع على مبدأ التشغيل والإيقاف.
في التبريد وهندسة التبريد ، وكذلك في أنظمة تكييف الهواء الصناعية منظمات تلقائيةالتي تنفذ قوانين تنظيمية مختلفة.
تحدد معادلة المنظم ، التي تعكس قانون تنظيمها ، اعتماد تشكيل إشارة التحكم (الإخراج) U () ، التي تعمل على الهيئة التنظيمية RO ، على انحراف القيمة الخاضعة للرقابة Δy(إشارة الإدخال) من القيمة المحددة.
في هذا الطريق، قانون التنظيم - هذا نوع من العلاقة الرياضية بين قيم المخرجات والمدخلات لوحدة التحكم.
يظهر هيكل مبسط لنظام التحكم الآلي في الشكل. 3.3
الشكل 3.3. رسم تخطيطي وظيفي لـ ACP
مبدأ تشغيل ASR. قيمة مضبوطة ذكائن أتمتة ، يشار إلى قيمته في الوقت الحالي ذ t ، يدخل عنصر المقارنة لوحدة التحكم ES ويقارن بالقيمة المحددة ذ المؤخر. عند إخراج ES ، يتم إنشاء إشارة عدم تطابق Δy = ص المؤخر -ص تي، قيمتها هي البيانات الأولية لتشكيل إشارة التحكم. بالقيمة Δyونوع قانون التحكم المضمن في مضخم الصوت فوق البنفسجي ، عند خرج وحدة التحكم الأوتوماتيكية AR ، يتم تشكيل إشارة تحكم U ، تحدد معلماتها سلوك الهيئة التنظيمية RO (سرعة وحجم الحركة).
قيمة الإدخال للكائن المتحكم فيه x(مادة أو طاقة) تؤثر على حالة المتغير الخاضع للرقابة ذ، تحت تأثير التناضح العكسي ، إلى إجراء تنظيمي x صقادرة على تعويض الاضطراب F، والتي انحرفت القيمة الخاضعة للرقابة عن القيمة المحددة.
وفقًا لنوع إشارة التحكم ، يتم تقسيم قوانين التحكم إلى منفصلة: نبض (AI ، SHI ، CHI) أو موضعي (اثنان ، ثلاثة ، ومتعدد المواضع) ، ومستمر: متناسب (P) ، متكامل (I) ، التفاضلية (D) ، ومجموعاتها: التكامل النسبي (PI) ، التفاضل النسبي (PD) والمشتق النسبي المتكامل (PID). وفقًا لهذه القوانين ، يُشار إلى وحدات التحكم الصناعية المستمرة باسم P-controller و PI-controller و PD-controller و PID-controller ، وتسمى وحدات التحكم المنفصلة: أجهزة تحكم ثنائية أو ثلاثية أو متعددة المواضع.
المنظمون الذين لديهم قوانين تنظيمية مختلفة لديهم عملياتهم العابرة ، والتي تؤدي إلى حركة الهيئة التنظيمية وتغيير في إمداد المادة أو الطاقة لموضوع التنظيم.
تفسير. لضمان الجودة المطلوبة للعملية التكنولوجية في كائن التحكم ، في الوضع الانتقالي ، يتم تحديد نوع وحدة التحكم ويتم حساب معلمات الضبط الخاصة بها. يتم حساب إعدادات وحدة التحكم وفقًا للمعلمات الديناميكية للكائن المنظم: ثابت الوقت Tob وقيمة التأخير τrev.
3.1.3.1. وحدات تحكم منفصلة.
يتم وصفها بواسطة قوانين التنظيم غير الخطية وتنقسم إلى دفعةو الموضعية.
نبضة (منفصلة في الوقت المناسب).
يمكن أن تأخذ قيمة خرجهم U أي قيمة ، ولكن فقط في فترات زمنية معينة. في الفترات الفاصلة بين النبضات ، تختفي الإشارة. عدد النبضات محدود في الفترة الزمنية ∆Т = - τ 1.
يوضح الشكل 3.4 خصائص AR مع قوانين التحكم في الاندفاع.
الشكل 3.4. قوانين الاندفاع للتنظيم
تنقسم قوانين الانفعالات للتنظيم إلى:
السعة-النبض (AI) ؛
عرض النبض (PWM) ؛
تردد النبض (PHI)
الموضعية (منفصلة من حيث المستوى).
تحتوي إشارة خرجهم U على عدد ثابت (محدود) من قيم الإخراج (اثنان أو ثلاثة أو عدة). تسمى هذه القوانين ، وبالتالي ، الهيئات التنظيمية ، ثنائية وثلاثية ومتعددة.
تظهر خصائص قوانين التنظيم الموضعية في الشكل. 3.5
الشكل 3.5. قوانين التنظيم الموضعية
تحت تأثير الإشارة في تي، القادمة من المستشعر وإشارة عدم التطابق المتولدة أنتتعمل إشارة خرج المنظم U على المنظم ، والذي يمكن أن يأخذ أحد المواضع المقابلة لـ U1 ، U2 ... Un ، أي يقومون بإجراء تنظيمي متدرج.
أبسط قانون تحكم موضعي وأكثرها استخدامًا هو قانون الموضعين ، حيث تأخذ إشارة الخرج قيمتين فقط للحالة المستقرة 1 أو 0.
(القسم 3. إدارة مرافق الطاقة في القاعدةمنفصلة وقوانين مستمرة
اللوائح
تعتمد خصائص أنظمة التحكم الآلي على خصائص الكائن وخصائص وحدة التحكم. لذلك ، عند تصميم ACP ، مع مراعاة خصائص الكائن ، فإنهم يبررون استخدام نوع واحد أو آخر من المنظم بحيث يمكن للنظام التنظيم التلقائيأن يكون بسيطًا قدر الإمكان وموثوقًا وله خصائص تلبي متطلبات العملية من حيث دقة الحفاظ على المعلمة والجودة الخاضعة للرقابة عملية الانتقال.
وبالتالي ، اعتمادًا على خصائص الكائن والمتطلبات التشغيلية لمعلماته ، يتم تحديد نوع أو آخر من وحدات التحكم وقانون التحكم الذي يشكله.
لا يمكن إجراء ضبط أنظمة التحكم الآلي إلا إذا كان العاملون في التشغيل يعرفون الأسس النظرية للتحكم الآلي.
تاريخ النشر: 26 آذار (مارس) 2012منظمات تلقائية
يسمى جهاز التشغيل التلقائي المصمم لتنظيم أي معلمة لكائن ما بالمنظم التلقائي.
يمكن أن تكون الهيئات التنظيمية التلقائية إجراءً مباشرًا (مباشرًا) وغير مباشر (غير مباشر) (الشكل 7).
يسمى المنظم التلقائي للعمل المباشر (الفوري) أبسط منظم، يمكن أن يؤثر العنصر الحساس (الأساسي) بشكل مباشر على الهيئة التنظيمية (التنفيذية) بدون جهاز تحويل تضخيم ومصدر إضافي للطاقة. يعمل هذا المنظم فقط على حساب طاقة الجسم الخاضع للرقابة نفسه.
مثال على المنظم الأوتوماتيكي المباشر المفعول هو نظام تثبيت مستوى الماء في الخزان (الشكل 8.6). الكائن المنظم هو الخزان 1 ، المعلمة المنظمة هي ارتفاع مستوى الماء H. تعتمد قيمة المعلمة المنظمة على النسبة بين قيم تدفق المياه Qi ومعدل التدفق Q2. يتم تحقيق استقرار هذه المعلمة من قبل الجسم المنظم - المثبط 2 ، الذي يتم التحكم فيه بواسطة عنصر حساس - الطفو 5 من خلال الرافعة 3 والرابط 4.
يؤدي الانخفاض في مستوى الماء إلى انخفاض العوامة ، وبالتالي فتح المثبط 2 ، أي زيادة في تدفق المياه. عندما يرتفع المستوى ، تحدث العملية العكسية.
يُطلق على المنظم التلقائي للعمل غير المباشر (غير المباشر) واحدًا ، والذي يتضمن جهاز تحويل تضخيم ، يتم تشغيله من مصدر خارجي للطاقة.
مخطط منظم العمل غير المباشر المصمم لتنظيم مستوى الماء في الخزان 1 موضح في الشكل. 9.6 يتم التحكم في المثبط 2 ، الذي ينظم كمية المياه الواردة Qb ، بواسطة عنصر حساس - الطفو ب ، ليس بسبب طاقة الماء ، ولكن بسبب إضافية طاقة كهربائية، تشارك في تشغيل تحويل الجسم - مقياس الجهد 4 والتضخيم - محرك كهربائي 3 (محرك الهيئة التنظيمية).
بالنسبة للمنظم قيد النظر ، مع توصيل منزلق مقياس الجهد بالرافعة 5 في الوضع الأوسط ، يكون ارتفاع مستوى الماء مساويًا للقيمة المعطاة R ، ولا يعمل المحرك الكهربائي 3. عندما ينخفض مستوى الماء ، فإن العوامة ، والخفض ، تحرك منزلق مقياس الجهد نحو علامة الجمع ، ويفتح المحرك الكهربائي المثبط قليلاً. 2. عندما يرتفع المستوى ، يتحرك المنزلق باتجاه علامة الطرح ، مما يتسبب في دوران المحرك الكهربائي في الاتجاه المعاكس ، وبالتالي يتم إغلاق المثبط.
اعتمادًا على طريقة تحريك الهيئة التنظيمية ، يمكن أن تكون الهيئات التنظيمية التلقائية ذات عمل مستمر ومتقطع.
في المنظمين الأوتوماتيكي للتنظيم المستمر ، تحتل الهيئة المنظمة ، باستثناء الهيئات المتطرفة ، أي منصب وسيط ، اعتمادًا على مسار العملية. أمثلة على هذه المنظمات موضحة في الشكل. 8 و 9. في منظمات التحكم الأوتوماتيكي المتقطع ، تشغل الهيئة المنظمة موقعين متطرفين فقط (للوضعين) أو موقعين متطرفين وعدة مواقع وسيطة (للوضعيات متعددة المواضع).
مثال على التشغيل المتقطع منظم متقطعهي وحدة التحكم في درجة الحرارة التلقائية الموضحة في الشكل. 6.6. هنا ، يمكن فتح أو إغلاق الجسم المنظم (صمام التحكم بالبخار) ، أي يشغل موقعين متطرفين فقط.
يتم تحديد طبيعة تدفق عملية التنظيم المستمر بموجب قانون التنظيم ، أي اعتماد قيمة خرج وحدة التحكم التلقائية على المدخلات.
يتم تحديد قانون التنظيم بواسطة جهاز التحكم للجهة المنظمة. على هذا الأساس ، يتم تقسيم المنظمين الأوتوماتيكي إلى ثابت واستاتيكي. يمكن اعتبار ميزاتها في مثال منظمات مستوى الماء الأوتوماتيكية (انظر الشكل 8 و 9).
وحدة التحكم الثابتة أو النسبية هي وحدة تحكم توفر إجراء تحكم يتناسب مع انحراف القيمة الخاضعة للرقابة:
يتم تحقيق هذا التأثير من خلال تضمين عناصر ثابتة في وحدة التحكم واستخدام الملاحظات الصلبة. في وحدة تحكم مستوى الماء الثابتة الموضحة في الشكل. 8.6 ، لا تظل قيمة المعلمة الخاضعة للرقابة ثابتة ، ولكنها تعتمد على حجم التأثير المزعج. للحفاظ على المستوى عند نفس الارتفاع ، من الضروري أن يكون تدفق المياه مساويًا لتدفقه.يعتمد تدفق الماء على فتحة المثبط 2 ، أي على موضع العوامة 5. كلما زاد التدفق من الماء ، كلما زاد - يجب أن يكون المخمد مائلاً ويكون الجزء السفلي عند العوامة في حالة ثابتة للمنظم ، مع انخفاض تدفق المياه ، يكون موضع العوامة أعلى. وبالتالي ، فإن مستوى الماء في الخزان يعتمد على كمية تدفق المياه ، أي على حجم الاضطراب ، ويتقلب ضمن بعض الحدود الصغيرة بالنسبة لمتوسط القيمة.
يتميز تشغيل المنظم الساكن دائمًا ببعض الأخطاء المستمرة. ل السمات الإيجابيةيتضمن ميلًا صغيرًا للتقلبات في المعلمة الخاضعة للرقابة. تُستخدم المنظمات الثابتة ، كونها أبسط في التصميم ، في الحالات التي لا يؤثر فيها خطأ بسيط في تشغيلها بشكل كبير على كائن غير منظم.
في وحدة التحكم الساكنة ، تتناسب قيمة الإخراج y (إجراء التحكم) مع تكامل انحراف التحكم:
في وحدة التحكم هذه (انظر الشكل 9.6) ، لا تعتمد قيمة المعلمة الخاضعة للرقابة على حجم الإثارة. في المثال قيد النظر ، يتم ضمان ذلك من خلال حقيقة أنه لا يوجد اتصال صارم بين العنصر الحساس - الطفو 6 والجسم المنظم - المثبط 2. في حالة مستقرة و معان مختلفةمعدل التدفق Q2 من الماء ، سيشغل المخمد مواقع مختلفة ، وسيكون العوامة دائمًا كما هي ، بما يتوافق مع القيمة المحددة H لمستوى الماء في الخزان.
المنظم الستاتيكي ، على عكس المنظم الثابت ، يخلو من خطأ التحكم الثابت. ومع ذلك ، فهو عرضة لعمليات التذبذب ولا يكون دائمًا مستقرًا في التشغيل.
لكي تكون وحدة التحكم التلقائية مناسبة للاستخدام العملي ، من الضروري ضمان استقرار النظام وجودة تنظيم مقبولة.
يتم تحديد استقرار نظام التحكم الآلي من خلال عدد من المؤشرات التي تعكس طبيعة العمليات العابرة أثناء التنظيم. توفر الأدبيات الخاصة معايير وأساليب لتحليل استقرار المنظمين.
تُفهم جودة عملية التنظيم على أنها المراسلات بين التغيير المعطى والفعلي في المعلمة الخاضعة للرقابة. عادة ما يتم تحديد هذه الجودة من خلال المؤشرات التالية:
1) الفرق بين المجموعة والقيم الفعلية للمعامل المتحكم به في حالة ثابتة (خطأ في النظام) ؛ 2) التجاوز (التجاوز) ، أي أكبر انحراف للقيمة الفعلية للمعامل عن المعطى ؛ 3) وقت التحكم (سرعة النظام) ، والذي يُؤخذ مساويًا لمدة العملية المؤقتة من بدايتها إلى اللحظة التي تكتسب فيها المعلمة الخاضعة للرقابة قيمة قريبة (عادةً 95-97٪) من القيمة في الحالة المستقرة ؛ 4) عدد تذبذبات المعلمة الخاضعة للرقابة في وقت معين.
هناك طريقتان لزيادة استقرار وجودة تنظيم أنظمة التحكم الآلي: عن طريق تغيير معلمات الكائن أو المنظم الخاضع للتنظيم وعن طريق تغيير مخطط كتلة المنظم. من الناحية العملية ، عادةً ما يغيرون مخطط كتلة المنظم ، والذي يتم تقديم روابط إضافية له. تسمى أجهزة المنظمين الآليين ، التي تتكون من هذه الروابط ، بأنها تصحيحية. غالبًا ما يمثلون أنواعًا مختلفة من التعليقات الإضافية (الداخلية).
من بين المنظمين الأوتوماتيكيين مع الأجهزة التصحيحية ، الأكثر شيوعًا هي متساوية مع العمل على المشتق (مع تقدم).
وبالتالي ، تتمتع وحدات التحكم هذه بالخصائص الديناميكية الجيدة لوحدات التحكم الثابتة جنبًا إلى جنب مع الخصائص الثابتة الجيدة (على سبيل المثال ، عدم وجود انحراف في الحالة المستقرة) لأجهزة التحكم غير الثابتة.
يتم تحقيق هذا المزيج بمساعدة ردود الفعل المرنة التي لا تعمل إلا أثناء العمليات العابرة لتخميد التذبذبات وهي غائبة في حالة الثبات.
يظهر في الشكل مخطط وحدة تحكم متساوية مع ردود فعل مرنة على شكل إعتام عدسة العين للتحكم التلقائي في درجة الحرارة. 10. يتم قياس درجة الحرارة في الغرفة 18 بواسطة مقياس حرارة المقاومة 17 الموجود في أحد أذرع جسر القياس الكهربائي 15. يتم توصيل لف مرحل مستقطب حساس 9 بأحد قطري الجسر ، والثاني قطري مدعوم من المصدر الجهد المستمر. يتم ضبط درجة الحرارة المراد تثبيتها بواسطة أداة الضبط 16 ، والتي تقوم بتحريك شريط التمرير لإحدى المقاومات R للجسر الكهربائي.
عندما تكون درجة الحرارة في الحجرة أعلى من تلك المحددة ، فإن المرحل 9 يغلق التلامس 10 ، والذي يقوم بتشغيل الملف 8 للمحرك القابل للانعكاس 7 التيار المباشر. يقوم المحرك بتدوير الأسطوانة 2 المتصلة بالصمام 1 لخط أنابيب البخار ، وبالتالي تقليل إمداد البخار بالسخان 19 من الغرفة.
عندما تنخفض درجة الحرارة في الحجرة ، يتغير اتجاه التيار في ملف التتابع المستقطب إلى الاتجاه المعاكس ويغلق التتابع التلامس 11 ، والذي يقوم بتشغيل الملف 6. ويبدأ المحرك في الدوران في الاتجاه المعاكس ، والأسطوانة 2 يفتح الصمام 1 ، ونتيجة لذلك يزداد تدفق البخار إلى السخان 19.
تم صنع جهاز متساوي لتحسين الخصائص الديناميكية للمنظم باستخدام إعتام عدسة العين (الفرامل الهيدروليكية) 4 مع زنبرك 5. عندما تدور الأسطوانة 2 ، تتحرك الرافعة 3 ، ومعها الساد 4 مع شريط التمرير 12 من مقياس الجهد 14. يغير هذا النسبة بين المقاومات المضمنة في أكتاف الجسر 15 ، ويتم توفير إشارة تصحيحية إضافية لملف الترحيل 9. لا يوجد الاتصال الصلب للرافعة 3 بالمحرك 12 إلا عندما يتم تحريك الرافعة بسرعة في عمليات عابرة ، منذ ذلك الحين تمنع الفتحة الصغيرة للمخمد 13 الزيت من الانتقال من تجويف الساد إلى آخر والقضيب مع أسطوانة إعتام عدسة العين يتحرك كواحد. بعد مرور بعض الوقت ، عندما تنتهي عملية الانتقال ، يعيد الربيع 5 المكبس والمحرك 12 إلى موضعه الأصلي ، ويمرر الزيت عبر المثبط 13 من تجويف أسطوانة الساد إلى آخر. وهكذا ، في نهاية عملية التنظيم ، يتم استعادة توازن الجسر ، الذي حدده السيد 16 ، مرة أخرى.
إذا كان الكائن المنظم مختلفًا سعة كبيرة(ثابت الوقت كبير) ، ليس من الضروري استخدام وحدة تحكم متساوية مع ردود فعل مرنة. في هذه الحالة ، يمكن استخدام متحكمات ردود الفعل الثابتة الثابتة (انظر الخط المنقط في الشكل 10).
يقوم المنظمون الذين لهم تأثير على مشتق الانحراف بتنظيم الانحراف ومشتقاته ، مما يجعل من الممكن مراعاة طبيعة التغيير في المتغير الخاضع للرقابة. لذلك ، يطلق عليهم أيضًا اسم المنظمين الأوليين.
هذه الميزة ضرورية في تنظيم العمليات السريعة. يمكن التعبير عن قانون تنظيم مثل هؤلاء المنظمين من خلال المعادلة
تعمل وحدات التحكم المشتقة على إخماد التذبذبات وزيادة استجابة النظام ، وبالتالي تحسين الجودة العابرة.
يمكن رؤية تأثير تحسين جودة العابرين في المنظمين الأوليين في الشكل. 11. افترض أن التغيير في المعلمة الخاضعة للرقابة مع مرور الوقت يتم التعبير عنه من خلال منحنى صلب (الشكل 11 ، أ).
تعمل وحدة التحكم النسبية الثابتة التي تم اعتبارها سابقًا بدون أجهزة تصحيحية على تقليل عدم التطابق بين القيم المحددة والقيم الفعلية للمعلمات ، ليس فقط أثناء وجودها ، ولكن أيضًا (بسبب القصور الذاتي) لبعض الوقت بعد إزالتها. لذلك ، يتحول جهاز التحكم هذا إلى العمل في الاتجاه المعاكس ليس عند النقطة B ، عندما يكون عدم التطابق صفراً ، ولكن بعد ذلك إلى حد ما ، في القسم BC ، ويمارس لبعض الوقت تأثيرًا معاكسًا للتأثير المطلوب.
يعمل المنظم المسبق بشكل مختلف. في مجال الانحراف المتزايد للمعلمة الخاضعة للرقابة عن المحدد ، يتم فرض إجراء وحدة التحكم ، لأنه في بداية العملية العابرة ، يكون الانحراف والمشتق علامات متطابقة، والمشتق له أعظم قيمةعندما يقترب الفأس من الصفر. نتيجة لهذا ، سينخفض أكبر انحراف للمعامل في بداية العملية المؤقتة ، على سبيل المثال ، ستأخذ النقطة A الموضع Ai. في القسم AB ، بسبب الانخفاض في انحراف المعلمة الخاضعة للرقابة ، يوقع المشتق تغييرات. لذلك ، يعطي المنظم إجراءً لا يساوي المجموع ، ولكن للاختلاف في الإشارات من حيث الانحراف والمشتق ، أي أقل. إذا تلقت وحدة التحكم بدون مقدم أمر تبديل للعمل في الاتجاه المعاكس بالقرب من النقطة B ، فإن وحدة التحكم مع التقدم تتلقى مثل هذا الأمر في وقت سابق ، على سبيل المثال بالقرب من النقطة E ، عندما يكون الانحراف وإشارات المشتقات متساويين. تبديل وحدة التحكم للعمل في الاتجاه المعاكس قبل توقف انحراف المعلمة ، يمنع هذا الانحراف في الاتجاه السلبي. يمكن أن تصبح العملية العابرة غير دورية ، كما يتضح من الخط المنقط في الشكل. 11 أ.
قد تكون الأجهزة التصحيحية المستخدمة للتأثير الإضافي لوحدة التحكم على الكائن ، والتي تتناسب مع مشتق المعلمة الخاضعة للرقابة ، مختلفة. طرق مختلفةيمكن أيضًا تضمينها في المخطط.
على التين. يوضح الشكل 11 ج مخططًا أوليًا لنظام التحكم الآلي ذي الإجراء المشتق. هنا ، يعد الجهاز التصحيحي عنصرًا مميزًا مدرجًا في سلسلة في سلسلة العمل الرئيسية لروابط النظام. يتم تغذية انحراف المعلمة الخاضعة للرقابة إلى مدخلات هذا الارتباط ، والمخرجات هي قيمة مساوية لمجموع فترتين ، يتناسب الأول منهما مع انحراف المعلمة الخاضعة للرقابة ، والثاني هو مشتق من هذا الانحراف. تتم الإشارة إلى معلمات الإخراج لعناصر التحويل والتنفيذية والتنظيمية بواسطة وظائف القطار من وقت i.
على التين. 11 ، ز معطى مخطط الرسم البيانيالتحكم الآلي في سرعة دوران عمود المحرك الكهربائي DC ، المقابل لمخطط العنصر في الشكل. 11 ، ج. عنصر التمايز (الموضح في الخط المنقط) عبارة عن دائرة من المقاومات RiR2 والسعة C ، مجمعة بطريقة تجعل 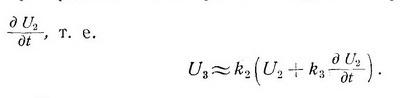
، بمعنى آخر.
في الدائرة ، يكون عنصر القياس عبارة عن مولد كهربائي ، ويتناسب جهده مع عدد الدورات n للمحرك الكهربائي D. تتم مقارنة هذا الجهد بالجهد المحدد في مقياس الجهد المحدد.
يتم توفير جهد الخرج U3 لدائرة التمايز لمكبر الصوت 1 ، ويتم تطبيق الجهد المضخم على ملف الإثارة لمضخم EMU الكهرومغناطيسي المستخدم كعنصر تحكم في النظام.
يعمل النظام بالطريقة الآتية. مع زيادة الحمل 2 للمحرك الكهربائي D ، تقل سرعة الدوران n لعموده. في هذا الصدد ، يتناقص حجم الجهد الناتج عن مولد سرعة المحرك ، وبالتالي ، يزداد جهد عدم التطابق في النظام. نتيجة للظرف الأخير ، يزداد الجهد على لفات الإثارة لوحدة التحكم الإلكترونية ، مما يؤدي إلى زيادة القوة الحالية / التدفق عبر عضو الإنتاج للمحرك D.
توفر الزيادة في تيار المحرك زيادة في عزم الدوران L1vp - ki ، مما يؤدي إلى زيادة سرعة دوران عمود المحرك.
نظرًا لأن قيمة المشتق ستكون الأكبر في بداية العملية المؤقتة (عندما تكون قريبة من 0) ، ستبدأ وحدة التحكم في العمل قبل حدوث عدم التطابق الضروري للمعامل المتحكم به. سيتم إجبار عمل المنظم في بداية العملية العابرة ، لأن انحراف المعلمة والمشتق لهما نفس العلامات.
في منتصف الفترة العابرة ، عندما يصل انحراف المعلمة إلى أكبر قيمة لها ، يتحول المشتق إلى الصفر ، لذلك يساعد على تقليل تجاوز المعلمة.
في نهاية العملية العابرة ، يكتسب المشتق مرة أخرى أكبر قيمة مع علامة المعاكس. هذا يساعد على تقليل مدة العملية العابرة ، والتي يمكن أن تصبح غير دورية.
منظمات تلقائية للعمل غير المباشر ، مصممة لتنظيم أي متغير وفقًا لبرنامج محدد مسبقًا ، بدلاً من الإعداد اليدويمزودة ببرامج تشغيل (الشكل 12).
في حالة استخدام عناصر حساسة كهربائية وجهاز تحويل تضخيم ، يمكن استخدام آلية الساعة 1 كبرنامج ، والذي يقوم بتعيين الدوران كامة 2 التي تعمل على محرك مقياس الجهد 3 للجهد المرجعي (الشكل 12.6) . يتوافق شكل الكاميرا التي تم تحديدها مع برنامج التحكم.
يسمى التنظيم مع تغيير قيمة المتغير الخاضع للرقابة وفقًا لقانون محدد مسبقًا تنظيم البرامج.
مع تنظيم البرامج ، "يسعى" المنظم التلقائي إلى القضاء على عدم التطابق بين واجهة المستخدم للجهد عند خرج عنصر الاستشعار والجهد المتناوب UQ للجهاز الرئيسي. "العمل" في المدخلات AC الجهد U0 ، يغير النظام المتغير المتحكم فيه (مثل درجة الحرارة Ѳ) عند المنفذ وفقًا لذلك.
يمكن جعل المنظمين الأوتوماتيكي للعمل غير المباشر عالميًا ومناسبًا لتنظيم معلمات العملية المختلفة. على سبيل المثال ، يمكن ربط أي عنصر استشعار (أولي) يقدم التأثير المطلوب والشدة بنظام القياس الخاص بهذه المنظمات. الى المخرج الهيئة التنفيذيةيمكن إرفاق منظم إلى هيئات تنظيمية مختلفة وفقًا لـ. نوع وشدة عمل الإخراج.
مقتطفات من كتاب أتمتة العمليات التكنولوجية في النجارة ، N.V.MAKOVSKY (الانتباه! أخطاء التعرف ممكنة)
من: LidiaZaiceva
مثل أنظمة التحكم الآلي بشكل عام ، يمكن تصنيف المنظمين الآليين وفقًا لمعايير مختلفة.
اعتمادًا على طبيعة المتغير المتحكم فيه ، يتم تمييز منظمات الضغط وسرعة الدوران والجهد ودرجة الحرارة وما إلى ذلك.
اعتمادًا على مبدأ التحكم المستخدم ، يتم تقسيم جميع وحدات التحكم إلى وحدات تحكم الانحراف (الخطأ) ، وأجهزة التحكم في الاضطراب ، وأجهزة التحكم المدمجة (انظر الفقرتين 1.5 و 1.6).
بالنظر إلى وجود مصادر طاقة إضافية كأساس للتصنيف ، يمكننا التمييز بين المنظمين المباشرين وغير المباشرين (انظر الفقرة 1.7). في الوقت نفسه ، اعتمادًا على نوع الطاقة المستخدمة ، تتميز المنظمات الكهربائية والهيدروليكية والهوائية والهوائية والكهروميكانيكية والكهربائية والهيدروليكية وغيرها من المنظمات.
تشمل مزايا المنظمين الكهربيين الترابط ، وانخفاض الوزن والأبعاد ، وإمكانية استخدام العناصر الكهربائية والراديوية القياسية في دوائر المنظم ، فرص واسعةلتضخيم الإشارة وتحويلها ، والقدرة على التحكم عبر مسافات طويلة عن طريق إرسال الإشارات عبر خطوط الاتصال السلكية واللاسلكية. العيب الرئيسي للمنظمات الكهربائية هو ضخامتها وتعقيدها. نوع كهربائيفي تلك الحالات عندما يكون مطلوبًا الحصول على عزم دوران كبير بسرعات دوران منخفضة وسرعة عالية. يتطلب تركيب وتشغيل وصيانة أجهزة التحكم الكهربائية وخاصة الإلكترونية موظفين مؤهلين تأهيلاً عالياً. تكلفة المنظمات الكهربائية ، كقاعدة عامة ، أعلى من تكلفة المنظمات الهوائية والهيدروليكية من نفس النوع ، خاصة عندما يتم تصنيع معدات التحكم في نسخة مقاومة للانفجار.
تتمثل الميزة الأكثر أهمية للمنظمين الهيدروليكيين في الموثوقية العالية للتشغيل والخصائص الديناميكية الجيدة للمشغلات الهيدروليكية التي تطور قوى وعزم دوران كبيرة بسرعة عالية. في حالة استخدام الزيوت المعدنية كسوائل عمل ، فإن عيوب الأنظمة الهيدروليكية هي خطر الحريق ، وفي حالة استخدام الماء ، فإن إمكانية التآكل السريع لعناصر المعدات من التآكل.
تتمثل ميزة منظمات الهواء المضغوط مقارنة بالمنظمات الهيدروليكية في السلامة من الانفجار والحريق ، فضلاً عن عدم وجود أنابيب تصريف ، مما يبسط النظام. تشمل عيوبها انضغاط الهواء ، مما يؤدي إلى حدوث أخطاء إضافية في تشغيل نظام التحكم.
مما قيل ، من الواضح أنه لا يمكن للمرء أن يعطي تفضيلًا عامًا لنوع أو نوع آخر من الطاقة المساعدة - كل منها يمكن أن يكون سيئًا أو جيدًا في ظروف معينة محددة. توجد أجهزة التحكم الكهربائية والهيدروليكية والهوائية في تكنولوجيا الأتمتة وتتطور بشكل متوازٍ. تتمتع الأنظمة المختلطة بأكبر قدر من المرونة ، حيث يكون جزء القياس عادةً كهربائيًا ، ويتم اختيار عنصر التشغيل هيدروليكيًا أو هوائيًا. مثال على ذلك هو نظام المتابعة الكهروهيدروليكي الموضح في الشكل. 1.32.
اعتمادًا على وجود ردود فعل إضافية ، يتم تمييز المنظمين بدون ردود فعل محلية (انظر الشكل 1.9 ، أ ؛ 1.10 ، أ ؛ 1.12) ومع تعليق(انظر الشكل 1.22 و 1.23).
اعتمادًا على عدد المتغيرات الخاضعة للرقابة ، يمكن تقسيم جميع وحدات التحكم إلى بُعد واحد ومتعدد الأبعاد (انظر الفقرة 1.11).
يمكن تمييز طبيعة التشكيل المستخدم في إرسال الإشارات من أحد عناصر المنظم إلى آخر كأساس للتصنيف ، والتنظيم المستمر ، والمرحل ، والنبض ، والمنظم الرقمي عن المجموعة الكاملة للمنظمين الحديثين (انظر الفقرة 12.1).
كما ترى ، يتم تصنيف المنظمين الآليين في نفس المجالات الرئيسية مثل أنظمة التحكم الآلي بشكل عام.
من وجهة نظر نظرية تحكم تلقائىالأكثر فائدة هو تصنيف المنظمين اعتمادًا على قانون التنظيم المطبق فيها. دعونا نفكر في هذه المشكلة بمزيد من التفصيل فيما يتعلق بوحدات تحكم العمل المستمر أحادية البعد التي تعمل عن طريق الانحراف. يتضح في الفقرة 1.6 أن المهام الرئيسية لوحدات التحكم هذه تشمل تحديد الخطأ (1.2) وتشكيل إجراء تنظيمي يضمن تحقيق المساواة (1.3) بدرجة معينة من الدقة (انظر الشكل 1.7) . في هذا الصدد ، إحدى الخصائص الرئيسية للمنظمين الذين يعملون على الانحراف ، من الطبيعي النظر في المعادلة التي تربط الإجراء التنظيمي بالخطأ x. في معظم أجهزة التحكم الحقيقية ، تكون العلاقة بين الكميات معقدة للغاية ويتم وصفها المعادلة التفاضليةترتيب عالي (غير خطي عادة). لأغراض تحليل مقارنوالتصنيفات ، عادة ما يتم تبسيط معادلات المنظم ، مع إهمال القصور الذاتي للعناصر التي تشكل المنظم التلقائي.
قانون التنظيم هو العلاقة بين قيم المدخلات والمخرجات لوحدة التحكم ، والتي يتم تجميعها دون مراعاة القصور الذاتي لعناصرها. لا يتم تطبيق هذا المصطلح على أنظمة التحكم فحسب ، بل ينطبق أيضًا على أنظمة التتبع وأنظمة التوجيه وأنظمة التحكم وما إلى ذلك. في الحالات الأخيرة ، يُطلق على قانون التحكم اسم قانون التحكم.
في أبسط الحالات ، يعتمد إجراء التحكم فقط على الخطأ x:
إذا كانت الوظيفة (1.32) خطية ، إذن
![]()
أين ثابت؛ - معامل التناسب.
دلالة على أننا حصلنا على ذلك
يسمى قانون التنظيم الذي يتميز بالمعادلة (1.33) بقانون التنظيم النسبي. يطلق على المنظمين الذين يستخدمون قانون التحكم هذا اسم المنظمين النسبيين أو P-regulators. أمثلة على الأنظمة التي يستخدم فيها قانون التنظيم النسبي هي الأنظمة الموضحة في الشكل. 1.8 ، أ ؛ 1.9 ، أ ؛ 1.10 ، أ ؛ 1.13 و 1.22.
الميزة الرئيسية لـ P-regulators هي بساطتها الشديدة. لا تحتوي العناصر الوسيطة لهذه المنظمات (انظر الشكل 1.7 ، أ) على وسائل تصحيحية وتؤدي فقط وظائف تضخيم إشارة الخطأ من حيث القدرة وتحويل الطبيعة المادية لهذه الإشارة. لسوء الحظ ، فإن دقة التحكم التي توفرها وحدات التحكم P منخفضة نسبيًا ، خاصة بالنسبة للكائنات ذات الخصائص الديناميكية الضعيفة. في كثير من الحالات ، يؤدي تطبيق قانون الرقابة التناسبية إلى خطأ ثابت (انظر الفقرة 1.9).
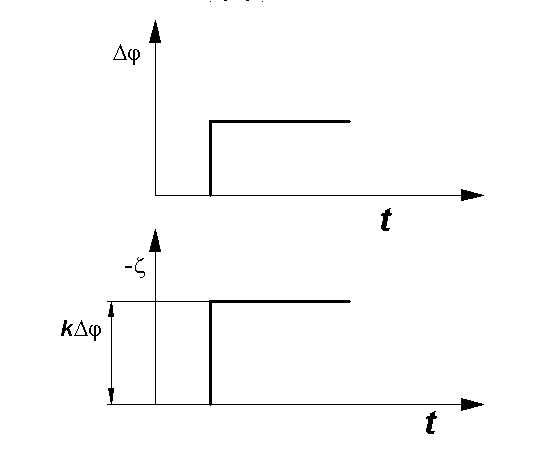
تميز المعادلة (1.32) طريقة واحدة فقط من الطرق الممكنة لبناء وحدات التحكم الأوتوماتيكية. النهج الثاني هو أنه ليس حجم الإجراء التنظيمي هو الذي يعتمد على إشارة الخطأ ، ولكن معدل تغيرها
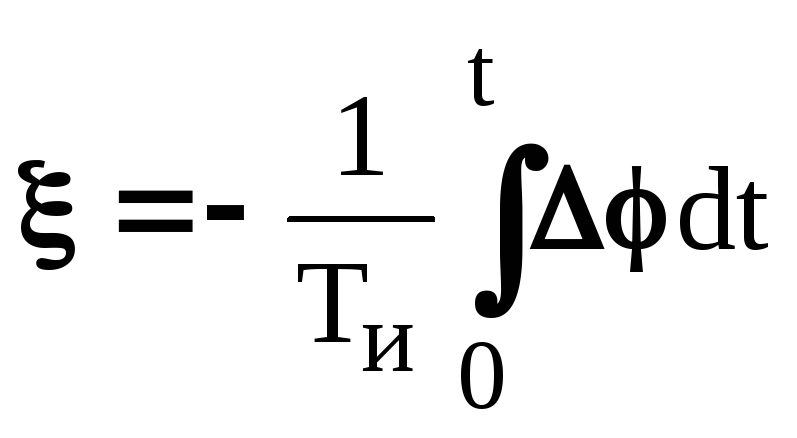
إذا كانت التبعية (1.34) خطية ، إذن
يسمى قانون التحكم (1.36) قانون التحكم المتكامل ، ويطلق على وحدة التحكم المقابلة اسم وحدة التحكم المتكاملة أو وحدة التحكم I. في الممارسة العملية ، يتم تنفيذ الاعتماد (1.36) عن طريق إدخال أجهزة في وحدة التحكم التي تدمج إشارة الإدخال. في كثير من الحالات ، تكون هذه الأجهزة هي مشغلات الأنظمة الأوتوماتيكية (انظر الشكل 1.12).
تُستخدم المُنظِّمات المتكاملة من أجل زيادة دقة تشغيل البنادق ذاتية الدفع في ظروف الحالة المستقرة (انظر الفقرة 1.9). لكن
سلوك أنظمة التحكم مع وحدات التحكم I في أوضاع غير مستقرة ، كقاعدة عامة ، تبين أنه غير مرض ، وعلى أي حال ، أسوأ مما هو عليه في الأنظمة التي تستخدم قانون التحكم النسبي. تم الكشف عن أسباب ذلك من خلال مقارنة العلاقات (1.33) و (1.36). في إطار المثالية المقبولة (مع إهمال القصور الذاتي لعناصر التحكم) في وحدة التحكم P بالمعادلة (1.33) ، يتغير إجراء التحكم فورًا عندما يتغير الخطأ x. هذا يعني أنه عند حدوث خطأ ، تتخذ وحدة التحكم P على الفور تدابير للقضاء عليها. هناك صورة مختلفة تجري في I-controller. على سبيل المثال ، عندما يكون من المعادلة (1.36) يتبع ذلك
وهذا يعني أن فترة زمنية معينة ستمر قبل أن تنحرف الهيئة التنظيمية بمقدار كافٍ لإزالة الخطأ الذي ظهر. مثل هذا "التأخر" في عملية تغيير الإجراء التنظيمي من عملية تغيير الخطأ x يمكن أن يؤدي (وإلى أنظمة حقيقيةغالبًا ما يؤدي) إلى حدوث تذبذبات ضعيفة التخميد أو حتى متباعدة للمتغير المتحكم فيه بالنسبة إلى قيمته المطلوبة.
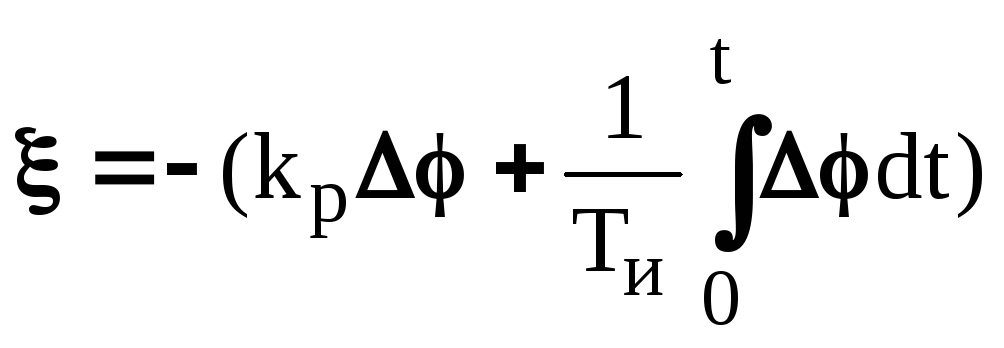
يمكن التخلص من العيب الملحوظ للمنظمين I بسهولة عن طريق الجمع بين المعادلتين (1.33) و (1.36) ، أي عن طريق تصميم وحدة التحكم بطريقة
أين هو معامل التناسب.
يسمى قانون التحكم (1.37) قانون التحكم النسبي المتكامل ، ويطلق على وحدة التحكم المقابلة اسم وحدة التحكم النسبية المتكاملة ، أو وحدة التحكم PI. نظرًا لوجود مكون متكامل على الجانب الأيمن من المعادلة (1.37) ، لا تحتوي وحدات تحكم PI على خطأ ثابت. يتم ضمان السلوك الجيد لـ ACS مع وحدات تحكم PI في أوضاع غير ثابتة (في الديناميكيات) (مع الحساب الصحيح لوحدة التحكم) بسبب المكون النسبي لقانون التحكم. جعلت الميزات المذكورة من الممكن استخدام وحدات تحكم PI على نطاق واسع في أنظمة التحكم للأغراض الصناعية العامة.
معادلة التفريق (1.37) فيما يتعلق بالوقت نحصل عليها
![]()
توضح مقارنة (1.38) مع (1.35) أن تحسين الخصائص الديناميكية لـ ACS مع وحدات تحكم PI (مقارنة بالأنظمة التي تستخدم قانون التحكم المتكامل) يتم تحقيقه من خلال إدخال عنصر في قانون التحكم يتناسب مع المشتق الزمني للخطأ إشارة ، أو (باختصار) عن طريق إدخال مشتق في القانون
اللوائح. هذا الاستنتاج صحيح ليس فقط بالنسبة لوحدات التحكم I ، ولكن أيضًا للأنواع الأخرى من وحدات التحكم.
يعد إدخال أحد المشتقات في قانون التحكم أداة قوية لتحسين سلوك ACS في أوضاع غير مستقرة. على وجه الخصوص ، من أجل تحسين ديناميكيات ACS ، غالبًا ما يتم إدخال مشتق الخطأ في قانون التحكم النسبي. والنتيجة هي قانون التحكم النسبي التفاضلي
![]()
يطلق على المنظمين مع قانون التحكم (1.39) اسم المنظمين PD باختصار. إنهم لا يتفاعلون مع الخطأ نفسه فحسب ، بل يتفاعلون أيضًا مع اتجاه تغييره. على سبيل المثال ، في حالة زيادة الخطأ x ، ويكون إجراء التحكم في وحدة تحكم PD أكبر منه في وحدة التحكم P (نعتبر المعاملات موجبة). على العكس من ذلك ، مع انخفاض الخطأ ، ستكون القيمة في وحدة تحكم PD أقل أيضًا من وحدة التحكم P. تساهم طبيعة تشغيل وحدة التحكم PD في التخميد (التبريد) للتذبذبات التي تحدث في ACS بسبب القصور الذاتي للعناصر الفردية للنظام. علاوة على ذلك ، تدخل وحدة التحكم PD حيز التنفيذ بالفعل عندما يكون هناك معدل تغيير في الخطأ الذي نشأ نتيجة لبعض الاضطرابات.
في الممارسة العملية ، يتم إدخال المشتق في قانون التحكم بمساعدة أجهزة التفرقة الخاصة ، والتي تتناسب قيمة مخرجاتها مع مشتق قيمة الإدخال. أمثلة على هذه الأجهزة هي التفاضل السلبي الدوائر الكهربائية، ومولدات التاكوجين ، ومضخمات التشغيل ، وما إلى ذلك (انظر الفقرة 2.9).
التنظيم فقط بشأن مشتق إشارة الخطأ ، أي أن استخدام قانون التحكم غير عملي ، فقط لأن المتحكم بقانون التحكم هذا لا يستجيب على الإطلاق للأخطاء الثابتة ذات الحجم الكبير بشكل تعسفي (بالقيمة)
بالإضافة إلى وحدات تحكم PI و PD ، غالبًا ما تستخدم وحدات تحكم PID مع قانون التحكم النسبي التفاضلي التفاضلي في ممارسة التنظيم
حيث يوفر المصطلح المتناسب مع تكامل الخطأ الدقة المطلوبة لعملية ACS في ظروف الحالة المستقرة ، والمصطلح المتناسب مع معدل تغيير الخطأ مصمم لتحسين الخصائص الديناميكية لـ ACS.
تعتبر قوانين الرقابة (1.33) و (1.36) و (1.40) المذكورة أعلاه من بين أبسط قوانينها. في أكثر تعقيدا
في الحالات ، يمكن إدخال العديد من تكاملات إشارة الخطأ في قانون التحكم. يمكن تقديم المشتقات ليس فقط من الأول ، ولكن أيضًا من الرتب الثانية والأعلى ، وليس فقط من إشارة الخطأ ، ولكن أيضًا من القيمة الخاضعة للرقابة أو أي إحداثيات وسيطة للنظام. في الهيئات التنظيمية التي تطبق مبدأ التنظيم المشترك ، يحتوي قانون التنظيم على مصطلحات تعتمد على الاضطراب المقاس لمشتقاته وتكامله ، إلخ.
تعتبر الأجهزة التي تعمل على إدخال المشتقات والتكاملات في قانون التحكم حالة خاصة من أجهزة التصحيح ACS. تمت مناقشة نظرية هذه الأجهزة وأسئلة حسابها بالتفصيل في الفصل. 6.
المعادلات (1.33) و (1.36) و (1.37) و (1.39) و (1.40) خطية بالنسبة للمتغيرات المدرجة فيها. في هذا الصدد ، تسمى قوانين التحكم المقابلة أيضًا خطية.
في هندسة التحكم ، يتم أيضًا استخدام قوانين التحكم الخطية وغير الخطية. يمكن أن تكون العلاقات (1.32) و (1.34) بمثابة أبسط الأمثلة لمثل هذه القوانين إذا كانت الوظائف التي تظهر فيها مختلفة عن الوظائف الخطية.
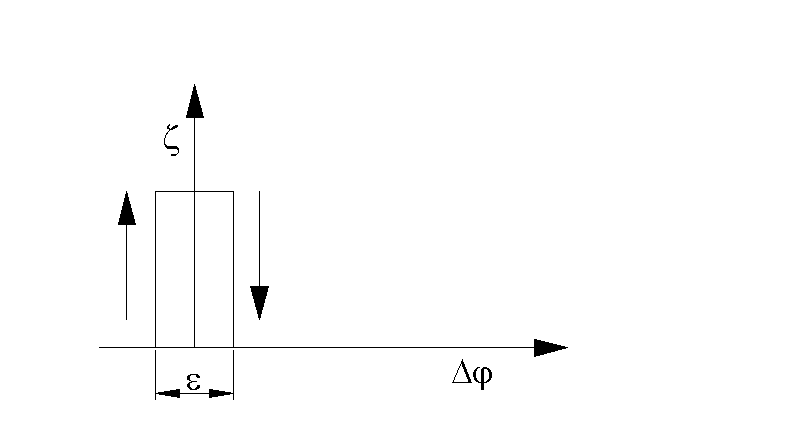
قوانين الترحيل هي الأكثر شيوعًا بين قوانين التحكم غير الخطية. على سبيل المثال ، بافتراض المعادلة (1.32)
أين هي القيمة القصوى للإجراء التنظيمي ، نحصل على ما يسمى بقانون التحكم في الترحيل ثنائي الموضع. في
أين هي القيمة التي تميز المنطقة الميتة لوحدة التحكم ، تحدد العلاقة (1.32) قانون التحكم في الترحيل ثلاثي المواضع ، إلخ.
إن استخدام قوانين التحكم في الترحيل في كثير من الحالات يجعل من الممكن حل مشكلة التحكم الآلي في هذا أو ذاك الكمية الماديةوسائل تقنية بسيطة للغاية ، مع وزن صغير وأبعاد لمعدات التحكم وسرعتها العالية. في كثير من الحالات ، يتيح استخدام القوانين غير الخطية للتنظيم والرقابة تحقيق مثل هذه النتائج التي لا يمكن تحقيقها من حيث المبدأ بمساعدة المنظمين الخطيين (انظر الفصل 8). لذلك ، يتم حاليًا تطوير الاتجاه المرتبط بتطوير وتطبيق قوانين التحكم غير الخطية بشكل مكثف.
")
































