14. منظمات تلقائية. تصنيف المنظمين حسب نوع الطاقة المستخدمة ، قوانين التنظيم ، طبيعة التأثير التنظيمي. النطاق والمزايا والعيوب.
منظمات تلقائية.
يسمى الجهاز الذي يتم بمساعدته الصيانة التلقائية لقيمة تكنولوجية بالقرب من قيمة معينة في أنظمة التحكم بالمنظم التلقائي.المنظم هو أحد عناصر النظام المغلق.
يتم تزويد مدخلات وحدة التحكم التلقائية بالتيار ذ رومعطى و 3القيمة الخاضعة للرقابة. عدم تطابق بينهما y t-i 3يؤدي إلى تغيير في قيمة الإخراج لوحدة التحكم x p
هذا الاعتماد من الناحية النسبية (في ش = 0)
مسمى قانون التنظيم. لكل جهة تنظيمية قانون تنظيم خاص بها.
تصنيف المنظمين.
من خلال وجود مدخلات الطاقةينقسم المنظمون إلى أولئك الذين ليس لديهم مصدر طاقة مساعد وأولئك الذين لديهم مصدر. المنظمين بدون مصدر طاقة إضافييتم استخدام طاقة الوسيط المنظم لتحريك الجسم المنظم. فهي بسيطة التصميم ، وموثوقة في التشغيل ، ولا تتطلب مصادر طاقة خارجية ، ولكنها تتمتع بقدرة محدودة على تشغيل الهيئة المنظمة. يتم استخدام هذه المنظمات في تلك الحالات عندما لا تكون هناك حاجة لجهود كبيرة لتحفيز الهيئة التنظيمية وتكون قوة جهاز القياس كافية لذلك ، وأيضًا إذا لم يتم فرض متطلبات صارمة على جودة العملية العابرة.
للمنظمين مع مصدر مساعدالطاقة ، يتم تنفيذ حركة الجسم المنظم بواسطة محرك إضافي يعمل من مصدر خارجي. يحتاجون إلى طاقة خارجية إضافية ولديهم المزيد بنية معقدة. هؤلاء المنظمون قادرون على توفير تنظيم عالي الجودة.
حسب نوع الطاقة المستخدمةتنقسم المنظمات إلى هيدروليكية وكهربائية وهوائية.
حسب نوع القيمة الخاضعة للرقابةهناك منظمات لدرجة الحرارة والضغط والتدفق والمستوى والتركيز وكميات أخرى.
حسب طبيعة العملتنقسم المنظمين إلى أولئك الذين لديهم مباشرة و الخصائص العكسية. بالنسبة لأولهم ، تؤدي الزيادة في إشارة الإدخال إلى زيادة قيمة الإخراج ، والعكس بالعكس بالنسبة للثاني.
حسب طبيعة الأثر التنظيميمن الممكن التمييز بين المنظمين المتقطع والمستمر. المنظمين عمل متقطعيتوافق التغيير المستمر في قيمة الإدخال مع تغيير متقطع في إجراء التحكم في عنصر واحد على الأقل من عناصر وحدة التحكم ، مما يؤثر بشكل كبير على تشغيل وحدة التحكم ككل. في المقابل ، يتم تقسيمهم إلى الموضعية، إلى جانب دفعة. المنظمين العمل المستمرالتغيير المستمر في قيمة الإدخال يتوافق مع التغيير المستمر في قيمة الإخراج.
وفق قانون التنظيمالمنظمون المستمرون مقسمون إلى تفاضل متكامل ، متناسب ، نسبي ، تفاضلي نسبي ، متناسب - متكامل - تفاضلي. حاليًا ، في أتمتة المؤسسات الكيميائية ، يتم استخدام أجهزة التحكم الموضعية ، وإلى حد كبير ، أجهزة التحكم في العمل المستمر.
إرسال عملك الجيد في قاعدة المعرفة أمر بسيط. استخدم النموذج أدناه
سيكون الطلاب وطلاب الدراسات العليا والعلماء الشباب الذين يستخدمون قاعدة المعرفة في دراساتهم وعملهم ممتنين جدًا لك.
نشر على http://www.allbest.ru/
" تلقائيالمنظمين"
جهاز استشعار إشارة منظم تلقائي
مقدمة
تتمثل المهمة الرئيسية لأنظمة التحكم في تثبيت معلمات العملية عند مستوى معين تحت تأثير التأثيرات الخارجية المزعجة التي تعمل على كائن التحكم. يتم ذلك عن طريق أنظمة التثبيت التلقائي. مهمة أخرى لا تقل أهمية هي مهمة توفير انتقال البرنامج إلى أنماط تشغيل جديدة. يتم حل هذه المشكلة باستخدام نفس نظام التثبيت ، والذي يختلف إعداده عن مستشعر البرنامج.
يظهر الرسم التخطيطي للكتلة لنظام أحادي الحلقة AR بواسطة كائن التحكم في الشكل 1. عناصره الرئيسية هي: AR - منظم تلقائي ، UM - مضخم طاقة ، IM - آلية التشغيل، RO هو هيئة منظمة ، SOU هو كائن التحكم نفسه ، D هو مستشعر ، NP هو محول تطبيع ، ZD هو واضع ، ES هو عنصر مقارنة.
المتغيرات: Yz - إشارة الإعداد ، خطأ التحكم الإلكتروني ، UP - إشارة خرج المنظم ، U y - جهد التحكم ، h - حركة الهيئة التنظيمية ، Q r - استهلاك المادة أو الطاقة ، F - التأثير المزعج ، T - - معلمة قابلة للتعديل ، Y OS - إشارة التغذية المرتدة (جهد الخرج أو تيار المحول).
يؤدي محول التطبيع الوظائف التالية:
يحول إشارة مستشعر غير قياسية إلى إشارة خرج قياسية ؛
يقوم بتصفية الإشارة ؛
· يحدد السمة الساكنة لجهاز الاستشعار من أجل الحصول على مدى خطي.
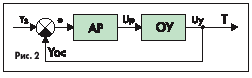
لأغراض الحساب ، يتم تبسيط الدائرة الأصلية للدائرة الموضحة في الشكل 2 ، حيث AR عبارة عن وحدة تحكم ، ونظام التشغيل هو كائن تحكم.
خيارقناةاللائحة
يمكن التحكم في نفس معلمة الإخراج للكائن بواسطة قنوات إدخال مختلفة.
عند اختيار قناة التحكم المرغوبة ، تؤخذ الاعتبارات التالية في الاعتبار:
من جميع إجراءات التحكم الممكنة ، يتم تحديد تدفق المادة أو الطاقة هذا أو توفيره للكائن أو إزالته منه ، حيث يؤدي الحد الأدنى من التغيير إلى التغيير الأقصى في القيمة الخاضعة للرقابة ، أي يجب أن يكون الكسب على القناة المحددة ، إذا أمكن ، كحد أقصى. بعد ذلك ، في هذه القناة ، يمكنك تقديم التنظيم الأكثر دقة.
· يجب أن يكون مدى التغيير المسموح به لإشارة التحكم كافياً للتعويض الكامل عن أكبر قدر ممكن من الاضطرابات التي تحدث في هذه العملية ، أي يجب أن يكون هناك هامش من قوة التحكم في هذه القناة.
· يجب أن تتمتع القناة المحددة بخصائص ديناميكية مواتية ، أي التأخير 0 والنسبة 0 / T 0 ، حيث T 0 هي ثابت الوقت للكائن ، يجب أن تكون صغيرة قدر الإمكان. بالإضافة إلى ذلك ، يجب أن يكون التغيير في المعلمات الثابتة والديناميكية للكائن على طول القناة المحددة مع تغيير في الحمل أو بمرور الوقت غير مهم.
رئيسيالمؤشراتجودةاللائحة
تُفرض المتطلبات على أنظمة التحكم الآلي ، ليس فقط من أجل استقرار عمليات التحكم على النطاق الكامل للأحمال على الكائن ، ولكن أيضًا لضمان مؤشرات جودة معينة للعملية. التنظيم التلقائي. هم انهم:
· خطأ في التنظيم (مكونات إحصائية أو مكونات جذر متوسط التربيع).
· وقت التعديل.
· التجاوز.
· مؤشر التقلب.
عامل التحكم الديناميكي R d ، والذي يتم تحديده من الصيغة
حيث يكون معنى الكميات Y 0 و Y 1 واضحًا من الشكل 3.
تحدد قيمة R d درجة تأثير المنظم على العملية ، أي درجة انخفاض الانحراف الديناميكي في النظام مع وبدون المنظم.
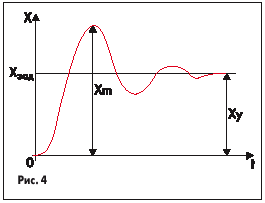
يعتمد مقدار التجاوز على نوع الإشارة المعالجة. عند تنفيذ إجراء الخطوة وفقًا لإشارة المهمة ، يتم تحديد قيمة التجاوز بواسطة الصيغة
حيث تظهر قيم X m و X y في الشكل 4.
عند العمل على التأثير المزعج ، يتم تحديد قيمة التجاوز من العلاقة
حيث تظهر قيم X m و X y في الشكل 5
زمناللائحة- هذا هو الوقت الذي تبدأ فيه القيمة المضبوطة في العملية العابرة تختلف عن القيمة الثابتة بأقل من القيمة المحددة مسبقًا ، حيث تكون دقة التحكم. يتم اختيار إعدادات وحدة التحكم لتوفير إما الحد الأدنى من القيمة الممكنة لوقت التنظيم الإجمالي ، أو الحد الأدنى لقيمة النصف الأول من الموجة العابرة.
في بعض أنظمة AP ، يحدث خطأ لا يختفي حتى بعد فترة طويلة من الزمن - هذا ثابتةخطأاللائحة-- من.
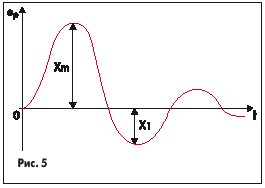
بالنسبة للمنظمين مع مكون متكامل ، فإن الأخطاء في الحالة المستقرة تساوي نظريًا الصفر ، ولكن يمكن أن توجد أخطاء غير مهمة عمليًا بسبب وجود مناطق ميتة في عناصر النظام. مؤشرتقلباتميميز حجم المعامل الأقصى لوظيفة نقل التردد لنظام مغلق (عند تردد الرنين) ، وبالتالي ، يميز الخصائص التذبذبية للنظام. تم توضيح مؤشر التقلب بوضوح في الرسم البياني في الشكل 6.
تقليديًا ، يعتبر أن قيمة М = 1.5 ... 1.6 هي القيمة المثلى للأنظمة الصناعية ، حيث يتم توفيرها في هذه الحالة في النطاق من 20 إلى 40٪. مع زيادة M ، يزداد التذبذب في النظام.
في بعض الحالات ، يتم تسوية عرض النطاق الترددي للنظام n ، والذي يتوافق مع مستوى كسب في نظام مغلق يبلغ 0.05. كلما زاد عرض النطاق الترددي ، زادت سرعة النظام المغلق. ومع ذلك ، فإن هذا يزيد من حساسية النظام للضوضاء في قناة القياس ويزيد من تشتت خطأ التحكم.
عند تعديل المنظمين ، يمكنك الحصول على ما يكفي رقم ضخمعمليات عابرة تفي بالمتطلبات المحددة. وبالتالي ، هناك بعض عدم اليقين في الاختيار قيم محددةإعدادات تحكم. من أجل القضاء على عدم اليقين هذا وتسهيل حساب الإعدادات ، يتم تقديم مفهوم عمليات التحكم النموذجية المثلى.
هناك ثلاث عمليات نموذجية:
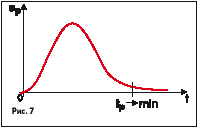
1. عملية غير دورية مع الحد الأدنى من الوقتالتنظيم (الشكل 7). تفترض هذه العملية النموذجية أن الاضطراب F (نظام التثبيت التلقائي) قيد الإعداد. في هذه القضيةيتم تحديد الإعدادات بحيث يكون وقت التحكم في الحد الأدنى. هذا النوع عملية نموذجيةتستخدم على نطاق واسع لأنظمة الضبط التي لا تسمح بالتقلبات في نظام التحكم المغلق.
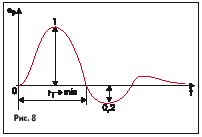
عملية مع تجاوز 20٪ والحد الأدنى من الوقت من نصف الدورة الأولى (الشكل 8). تُستخدم هذه العملية لضبط معظم البنادق ذاتية الدفع الصناعية ، لأنها تجمع بين سرعة عالية إلى حد ما (t1 = min) مع تذبذب محدود (= 20٪).
2. عملية توفر حدًا أدنى من معيار الجودة المتكاملة (الشكل 9). يتم التعبير عن معيار الجودة المتكاملة بواسطة الصيغة
أين البريد هو خطأ التحكم.
تشمل مزايا هذه العملية السرعة العالية (نصف الموجة الأول) مع تذبذب كبير إلى حد ما. بالإضافة إلى ذلك ، يمكن إجراء تحسين هذا المعيار فيما يتعلق بإعدادات وحدة التحكم بشكل تحليلي أو رقمي أو عن طريق النمذجة (على جهاز AVM).
عاديالهيكليمخططمنظم
يتكون المنظم الأوتوماتيكي (الشكل 10) من: ذاكرة - جهاز رئيسي ، SU - جهاز مقارنة ، UPA - جهاز تحويل تضخيم ، BN - وحدة ضبط.
يجب أن يولد جهاز القيادة إشارة مرجعية ثابتة للغاية (إعداد وحدة التحكم) أو يغيرها وفقًا لبرنامج معين. يتيح المقارنة مقارنة الإشارة المرجعية بإشارة التغذية الراجعة وبالتالي تكوين قيمة خطأ التحكم e p. يتكون جهاز تحويل التضخيم من كتلة لتوليد خوارزمية تحكم ، وكتلة لتعيين معلمات هذه الخوارزمية ، ومضخم طاقة.
تصنيفالمنظمين
يتم تصنيف وحدات التحكم التلقائية وفقًا لمعايير مختلفة. علي سبيل المثال:
حسب نوع المعلمة المنظمة: منظمات الضغط والتدفق والمستوى ودرجة الحرارة وما إلى ذلك ؛
حسب نوع الإجراء: هيئات تنظيمية متقطعة وغير متقطعة ؛
حسب طريقة العمل: منظمو العمل غير المباشر والمباشر.
هذه الأنواع من تصنيف الهيئات التنظيمية ليست حاسمة ، لأنها لا تميز خصائصها. السمة الرئيسية التي يتم من خلالها تصنيف المنظمين ، بغض النظر عن الانتماء إلى إحدى المجموعات المذكورة أعلاه ، هي خاصية الإجراء ، أي العلاقة بين التغيير في المتغير الخاضع للرقابة وحركة الهيئة التنظيمية.
وفقًا لخصائص الإجراء ، تنقسم الجهات التنظيمية إلى ما يلي:
المنظمين الموضعية (Pz) ؛
منظمات متكاملة (I) ؛
المنظمين النسبي (P) ؛
وحدات تحكم تكاملية (PI) ؛
· أجهزة التحكم التفاضلية (D) (أجهزة التحكم التفاضلية النسبية (PD) ، أجهزة التحكم التفاضلية النسبية - التكاملية - التفاضلية (PID)).
قيمة الإدخال لوحدة التحكم هي إشارة تتناسب مع الفرق بين القيم المحددة والقيم الحالية للقيمة الخاضعة للرقابة (القابلة للتعديل) ؛ الإخراج - منصب الهيئة التنظيمية.
متحكمات الموقف
يتم استدعاء المنظمين الآليين (AR) ، حيث يمكن للهيئة التنظيمية أن تشغل عددًا محدودًا من المناصب المعينة الموضعية. تنتمي المنظمات الموضعية (Pz) إلى مجموعة منظمات العمل المتقطع. أكثر المنظمات ذات الوضعين أو الثلاثة استخدامًا.
بالنسبة لوحدات التحكم في التشغيل والإيقاف ، اعتمادًا على علامة الانحراف المتغير المتحكم فيه ، يكون الجسم المنظم إما مفتوحًا بالكامل أو مغلقًا تمامًا. بالنسبة للمنظمين غير المتصلين ، بالإضافة إلى الوضعين المتطرفين ، يكون للجهة المنظمة وضع (وسط) آخر ، مما يساهم في تغيير أكثر سلاسة في القيمة الخاضعة للرقابة وتقليل عدد عمليات المنظم لكل وحدة زمنية.
أرز. 7.2 رسم تخطيطي (أ) وخاصية ثابتة (ب) وحدة تحكم PZ: أ) كائن واحد ؛ 2-10 أنابيب 3-صمام منظم 4 النواة. 5-الأسهم. 6 تعويم 7-ذراع الاتصال. 8.9 توقفات متحركة ؛ 11 الربيع. ب) قيمة I-set ؛ منطقة محايدة II 1-6 نقاط مميزة.
مبدأ تشغيل وحدة التحكم PZ هو كما يلي. على سبيل المثال ، في عنصر التحكم - الخزان 1 ، يتم توفير السائل من خلال الأنبوب 2 ، ويستهلكه المستهلك من خلال الأنبوب 10 (الشكل 7.2 أ).
العنصر الحساس للمنظم - الطفو 6 يقيس المستوى في الخزان ؛ يتم تحديد القيمة الحالية للمستوى من خلال موضع القضيب 5 والرافعة المتصلة به بشكل صارم - الاتصال 7 ، المتصل من خلال الزنبرك 11 بمصدر الجهد يو. يتم تحديد القيم المحددة للمستويات العلوية والسفلية من خلال موضع التوقفات المتحركة - جهات الاتصال 8 و 9 ، المحددة يدويًا.
عندما يرتفع المستوى فوق جهة الاتصال المحددة 7 سيتم إغلاق الاتصال 8 وسيتم تنشيط الملف بالمغناطيس الكهربائي للجر ، والذي من خلاله سيتحرك اللب 4 على الفور ، مما سيؤدي إلى إغلاق الجسم المنظم 3 (الصمام). عندما ينخفض المستوى إلى ما دون المستوى المحدد ، سيتم إغلاق جهة الاتصال 7 مع جهة الاتصال 9 ، وسيتم تنشيط الملف لكنالمغناطيس الكهربائي للجر ، المحرك 4 سوف يتحرك لأسفل ، مما يؤدي إلى فتح الجسم المنظم. الرسم البياني الموضح هو مثال على التحكم في التشغيل والإيقاف.
معادلات المنظم:
م= 0 فيدذ>-- 0 و م= 1 فيدذ 0
من الخاصية الثابتة لمنظم التشغيل والإيقاف (الشكل 7.2 ، ب) يمكن ملاحظة أن الزيادة في المستوى في الخزان تتوافق مع الحركة عبر النقاط 1،2،3،4 ؛ تتوافق النقطتان 2 و 3 مع الحركة اللحظية للمنظم من الوضع "المفتوح" إلى الوضع "المغلق" عند إغلاق جهات الاتصال 7 و 8. يتوافق الانخفاض في المستوى مع الحركة عبر النقاط 4،5،6،1 من الخاصية الثابتة.
منظمات متكاملة
يُطلق على المنظمين الآليين ، حيث يمكن أن تتوافق المواقف المختلفة للهيئة التنظيمية مع نفس قيمة المتغير الخاضع للرقابة متكامل،أو جامد (أستاتوس- غير مستقر ، مضطرب).
سرعة حركة الهيئة المنظمة لهذه الهيئات التنظيمية ، كلما زاد انحراف القيمة الخاضعة للرقابة عن القيمة المحددة.
ضع في اعتبارك مبدأ تشغيل المنظم باستخدام مثال مخطط الدائرة لمنظم هيدروليكي I للعمل غير المباشر (الشكل 7.3). عندما يتغير الضغط صفي خط الأنابيب ، يتغير الضغط على المنفاخ 1 ، حيث يتحرك الجزء السفلي منه ، مما يؤدي إلى دوران ذراع ABC بالنسبة للنقطة A وحركة مكابس البكرة 2 لأعلى أو لأسفل. متي صأكثر من القيمة المحددة ، ثم يتحرك الجزء السفلي من المنفاخ لأسفل ، ويدور ذراع ABC في اتجاه عقارب الساعة ، كما سيتم تحرير مكابس البكرة لأسفل وسيبدأ الزيت تحت الضغط في التدفق من الغرفة هاسطوانة جهاز التخزين المؤقت في التجويف ماسطوانة المحرك 7. سيبدأ مكبس المشغل (IM) ، المتصل بواسطة قضيب بجسم التنظيم (البوابة) 6 ، في التحرك لأعلى ، مما يزيد من درجة فتح البوابة ؛ سيؤدي ذلك إلى خفض الضغط ص. نتيجة لانخفاض الضغط ، يفتح المنفاخ 1 ، ويعيد ذراع ABC إلى موضعه الأصلي ، وتقوم مكابس البكرة بمنع وصول الزيت إلى أسطوانة IM ، ويتوقف إجراء التحكم.
أثناء حركة المكبس IM لأعلى ، يتم إخراج الزيت من التجويف نيتم دفع الاسطوانة للخروج من خلال الأنبوب من خلال الغرفة داسطوانة جهاز التخزين المؤقت ويتم تشغيلها لتصريف المياه 5. يتم تنظيف الزيت الذي تم تصريفه وإعادة تزويده بالغرفة همحطة ضخ خاصة.
أرز. 7.3 رسم تخطيطي لمنظم I للعمل غير المباشر: 1-منفاخ ؛ 2-بكرة. 3-ضغط زيت الإمداد ؛ 4،9 صمامات 5-استنزاف الزيت 6- الهيئة الرقابية. 7- آلية تنفيذية. 8 واضع.
بافتراض أن الضغط صيصبح أقل من المحدد ، ثم يتحرك الجزء السفلي من المنفاخ 1 لأعلى ، وتدور ذراع ABC عكس اتجاه عقارب الساعة ، وتحريك مكابس البكرة لأعلى ، والزيت من خلال التجويف هسيدخل التجويف ناسطوانة IM. سيؤدي ذلك إلى إغلاق البوابة وزيادة الضغط. ص. في الوقت نفسه ، يتم إخراج الزيت من تجويف الأسطوانة IM عبر التجويف Fتدخل اسطوانة جهاز التخزين المؤقت في الصرف.
يتم تعيين القيمة المحددة للقيمة المنظمة باستخدام أداة الضبط 8. عندما تتساوى القوى المطورة بواسطة المنفاخ وزنبرك الضبط ، يكون ذراع ABC في الوضع المحايد والزيت من الغرفة هلا يدخل اسطوانة IM.
غير متوفر في I-regulators ردود الفعل، فهي بسيطة في التصميم. أهم ميزة لهم هي أنه بغض النظر عن حجم حمولة الكائن الخاضع للتنظيم ، فإنهم يجلبون القيمة المنظمة إلى القيمة المحددة. لدى المنظمين بعض العيوب بسبب خصائصهم الديناميكية. انحراف صغير للقيمة المضبوطة عن القيمة المحددة ، تستمر وحدة التحكم I في تحريك عنصر التنظيم حتى الوضع المفتوح أو المغلق بالكامل. يحدث التغيير في اتجاه حركة RO فقط عندما تتجاوز القيمة الخاضعة للرقابة القيمة المحددة.
ينص قانون التحكم على عمل المنظم بسرعة تتناسب مع انحراف القيمة الخاضعة للرقابة ، ويتم وصفها بواسطة المعادلة
هنا س 0 - معلمة ضبط محسوبة خصيصًا للمنظم. تعني علامة الطرح أنه مع الانحراف الإيجابي للقيمة المضبوطة ، يتحرك RO نحو الإغلاق ، وبانحراف سلبي (تخفيض مقابل القيمة المحددة) - نحو الافتتاح.
معادلة منظم في شكل متكامل:
وظيفة النقل لوحدة التحكم لها الشكل
يوضح الشكل 7.4 أ الخاصية الثابتة لوحدة التحكم I. عندما يتم التحكم في القيمة ذأقل من القيمة المحددة ، المنظم ? في أدنى موضع. بمجرد أن تصل القيمة المنظمة إلى القيمة المحددة ، سيبدأ RO في التحرك نحو الفتح ويمكن أن يتوقف عند أي نقطة من المقطع الرأسي للخصائص.
منذ اللحظة ر 0 عندما القيمة الخاضعة للرقابة ذفجأة ، يتحرك التناضح العكسي بسرعة ثابتة ، مما يؤدي إلى تغيير التدفق (الشكل 7.4 ، ب).
أرز. 7.4 خصائص المنظم الأول: أ - ثابت ؛ منحنى التسارع ب ج - العملية الانتقالية.
نتيجة لعمل المنظم ، القيمة المنظمة ذيصل إلى القيمة المحددة بعد مرور بعض الوقت ر صمسمى زمناللائحة؛ علاوة على ذلك ، فإن العملية العابرة متذبذبة ومثبطة (الشكل 7.4 ، ج).
يتم استخدام وحدة التحكم I فقط في أنظمة التسوية الذاتية ، وإلا سيكون النظام غير مستقر.
أرز. 7.5 رسم تخطيطي (أ) وخاصية ديناميكية (ب) ووحدة تحكم في العمل المباشر: خط أنابيب واحد ؛ 2-البضائع 3 رافعة 4-غشاء 5-الأسهم. 6- الهيئة الرقابية. 7 الجسم خط 8 نبضات 9 صمام.
الشكل 7.5 ، يُظهر رسمًا تخطيطيًا لمنظم I ذو المفعول المباشر. في خط الأنابيب 1 ، بمساعدة الوصلات ذات الشفة والمسامير ، يتم تثبيت جسم المنظم 7. إذا كانت القيمة المنظمة هي الضغط صبعد تغيير المنظم ، سيتم نقل التغيير في الضغط من خلال خط النبض 8 والصمام 9 إلى الغشاء 4 IM المتصل بـ RO 6 باستخدام الجذع 5. عند النقطة ميوجد مفصل يربط القضيب بالرافعة 3 ، حيث يتم تثبيت الحمل 2 ، وهو جهاز الإعداد. ضغط قابل للتعديل صيعتمد على تدفق الوسيط ، أي على درجة الافتتاح RO 6. متى صتساوي القيمة المعطاة ، والجهود التي طورها الغشاء 4 والحمل 2 متساويتان ، والقضيب 5 ثابت. مع زيادة أو نقصان الضغط مقارنة بقضيب معين ، سوف يتحرك 6 ريال عماني للأسفل أو لأعلى ، على التوالي. تتناسب سرعة التشذير مع انحراف القيمة الفعلية للضغط المتحكم فيه عن المجموعة.
كما يتضح من الرسم البياني (الشكل 7.5 ، ب) عندما يتغير الحمل xالكائن في الوقت الحالي ر 0 يبدأ المتغير المتحكم به في التغيير ذوالتنقل في الهيئة التنظيمية. يحدث تغيير في إزاحة الهيئة التنظيمية في لحظة تغيير علامة القيمة الخاضعة للرقابة (النقاط ر 1 ، ر 2 ).
ضوابط تناسبية
تُسمى المنظمات التلقائية ، التي يؤدي فيها فصل المتغير الخاضع للرقابة عن القيمة المحددة إلى تحرك جسم التحكم بمقدار يتناسب مع حجم هذا الانحراف. متناسب، أو ثابتة (ستاتوسالمعلقة). تتوافق كل قيمة من المعلمة المنظمة مع موقف محدد للهيئة التنظيمية. تتحقق هذه العلاقة التناسبية من خلال عمل ردود الفعل الصعبة ، وهذا هو سبب تسمية أجهزة التحكم P أيضًا بوحدات التحكم في التغذية الراجعة الصلبة. تتناسب سرعة حركة الهيئة المنظمة لهذه المنظمات مع معدل تغيير المتغير المتحكم فيه. يمكن للمنظمين ، مثلهم مثل الأجهزة المتكاملة ، أن يكون لهم عمل غير مباشر ومباشر.
تختلف دائرة المنظم P (الشكل 7.6) عن دائرة I-regulator في أن ذراع ABC لا يحتوي على مفصلة عند النقطة A ، ولكنه متصل بمكبس IM 7 بمساعدة قضيب 8. هذا الاتصال تشكل ردود فعل صارمة.
نتيجة الفعل المزعج الذي يؤدي إلى زيادة الضغط صفي خط الأنابيب ، ستنتقل النقطة C إلى الموضع C "، والنقطة B إلى الموضع B" - وستتخذ الرافعة الموضع AB "C". في هذه الحالة ، ستتحرك مكابس البكرة 2 لأسفل وسيبدأ الزيت في التدفق إلى التجويف ماسطوانة المشغل ، وتحريك المكبس IM ، وفي مكانها ، الجسم المنظم 6 لأعلى. جنبًا إلى جنب مع المكبس ، يتغير الموضع A إلى الموضع A "(لأعلى) ، وسوف يتحرك الطرف الأيسر للرافعة ABC ، وستعود النقطة B" إلى الموضع B ، وسيعود مكبس التخزين المؤقت 2 إلى موضعه الأصلي ، مما يؤدي إلى الإغلاق وصول الزيت إلى المشغل. هذا يكمل العملية التنظيمية.
أرز. 7.6 رسم تخطيطي للمنظم P للعمل غير المباشر: 1-منفاخ ؛ 2-بكرة. 3-مدخل زيت الضغط ؛ 4 صمام 5-استنزاف الزيت 6- الهيئة الرقابية. 7- الآليات التنفيذية. 8 قضيب 9 واضع.
تعمل وحدة القياس (منفاخ 1) وآلية التغذية الراجعة على التناضح العكسي في وقت واحد تقريبًا. لذلك ، يجب اعتبار إزاحة التناضح العكسي نتيجة لعمل نظام القياس ، مخفضًا بقدر من التغذية الراجعة.
تعمل سرعة المنظم P بدلاً من I-regulator على استقرار العملية بسرعة نسبية وتجلب النظام إلى حالة التوازن.
أبسط وحدة تحكم ثابتة هي ارتباط تضخيم ويتم وصفها بواسطة المعادلة
هنا س 1 - ضبط معلمة (كسب) P-regulator.
وظيفة النقل من P-regulator.
;
أرز. 7.7 خصائص منظم P: ثابت ؛ منحنى التسارع ب ب- العابرين ؛ خطأ 1-ثابت صغير ؛ 2- الخطأ الساكن أكبر إلى حد ما ؛ 3- الخطأ الساكن كبير.
الخصائص الثابتة والديناميكية للمنظم P موضحة في الشكل. 7.7 من عائلة الخصائص الثابتة (الشكل 7.7 ، أ) ، يمكن ملاحظة أن التناضح العكسي يبدأ في التحرك فقط عندما تصل القيمة الخاضعة للرقابة إلى الحد الأدنى للتناسب. افترض أن القيمة الخاضعة للرقابة تتوافق مع 50٪ من مدى وحدة التحكم وأن الحد التناسبي مضبوط على 40٪ ( د= 40٪). يحتل المنظم موقعًا متوسطًا ( د= 50٪ تحرك). هذا الموقف يتوافق مع النقطة أ على الخاصية. إذا بدأ المتغير المتحكم به في الزيادة الآن ، فسوف يتحرك عنصر التحكم نحو الإغلاق.
منحنى التسارع للمنظم P (الشكل 7.7 ، ب) مشابه لوصلة التضخيم. إذا في ذلك الوقت ر 0 متغير متحكم فيه ذسيتغير فجأة (على سبيل المثال ، زيادة) ، سيتحرك المنظم أيضًا بشكل مفاجئ ( م) نحو الإغلاق.
على خصائص العمليات العابرة في نظام آليمع وحدة تحكم P ، تتأثر الحدود النسبية المحددة بشدة. مع زيادة الكسب س 1 ، أو ، وهو نفسه ، مع انخفاض حد التناسب د عملية الانتقاليستمر في شكل تذبذبات بطيئة ، وخطأ ثابت ص شارعصغير (الشكل 7.7 ، في المنحنى 1). مع عامل التضخيم الأمثل لكائن معين س 1 العابر يتحلل بسرعة ، ولكن الخطأ الثابت ص شارعيزيد بشكل طفيف (الشكل 7.7 ، في المنحنى 2). إذا كان الكسب س 1 صغير جدا ( دكبير) ، فيمكن أن تصبح العملية العابرة غير دورية مع وجود خطأ ثابت كبير (الشكل 7.7 ، المنحنى 2).
تعتمد قيمة الخطأ الثابت على كل من إعداد وحدة التحكم وخصائص الكائن وطريقة تشغيله. ضبط المنظم على القيمة المرغوبة د(الشكل 7.6) عن طريق تغيير نسبة الكتفين BC و AB للرافعة ABC. أصغر AB ، أكثر د.
يمكن استخدام أجهزة التحكم المتناسبة للتحكم في العمليات التي تحدث في الكائنات ، سواء مع أو بدون التسوية الذاتية. ومع ذلك ، يجب أن يوضع في الاعتبار أن تغييرات الحمل يجب أن تكون صغيرة بحيث يظل الخطأ الثابت ضمن الحدود المقبولة.
أرز. 7.8 رسم تخطيطي (أ) وخاصية ديناميكية (ب) للمنظم P للعمل المباشر: خط أنابيب واحد ؛ 2-غشاء 3 برغي 4 ربيع 5-الأسهم. 6- الهيئة الرقابية. خط 7 نبض 8-عمارات.
على التين. يوضح الشكل 7.8 مخططًا لمنظم P. على عكس منظم I ، في منظم P للعمل المباشر ، فإن القوة التي يولدها الغشاء لا تتم موازنتها بالحمل ، ولكن بواسطة الزنبرك 4 ؛ كلما زاد انحراف الضغط صمن القيمة المحددة ، كلما زاد انحناء الغشاء ، ولكن كلما زاد ضغط الزنبرك ، مما أدى إلى مقاومة الانحراف ؛ هذا يحقق التناسب بين القيمة الخاضعة للرقابة وإزاحة RO.
مع زيادة الحمل Q للجسم في ذلك الوقت ر حولمتغير متحكم فيه صلكن بسبب تحرك الهيئة الرقابية في اتجاه الإغلاق بعد فترة ر صيستقر (الشكل 7.8 ، ب). ومع ذلك ، نظرًا للخطأ الثابت ، ستختلف قيمته عن القيمة المحددة بواسطة ص فم.
وحدات تحكم PI
تُظهر المقارنة بين المنظمين P والمنظمين I أن الأول له ميزة من حيث الخصائص الديناميكية ويوفر أفضل عملية تحكم عابرة ؛ ميزة هذا الأخير هي عدم وجود خطأ ثابت ، أي أفضل الخصائص الثابتة.
تجمع وحدة التحكم PI بين كل من وحدات التحكم P و I. وهكذا ، على غرار I-regulator ، isodromic (من اليونانية ايزوس- متساوية ، متشابهة ؛ دروموس- تشغيل) تحكم يدعم قيمة ثابتةالقيمة الخاضعة للرقابة بغض النظر عن حمولة الكائن ، وإذا انحرفت عن القيمة المحددة في الوقت الأولي ، فسوف تنقل الهيئة التنظيمية بمقدار يتناسب مع قيمة الانحراف (كوحدة تحكم P) ، ثم تستمر في تحريك الجهة التنظيمية الجسم حتى يختفي الخطأ الثابت ، أي سيجلب القيمة الخاضعة للرقابة إلى القيمة المحددة.
وحدات تحكم PI هي وحدات تحكم غير مباشرة. يظهر الرسم التخطيطي لوحدة التحكم من النوع الهيدروليكي PI في الشكل. 7.9.
في الفترة الأولية ، يعمل المنظم باعتباره نسبيًا. مع زيادة المتغير المتحكم فيه (الضغط ص) سيبدأ مكبس المشغل 7 والجسم المنظم 6 في التحرك لأعلى. نقوم بتوصيل مكبس IM 7 بالنقطة A من ذراع ABC بشكل غير صارم (كما هو الحال مع منظم P) ، ولكن من خلال جهاز isodrom ، والذي يتكون من أسطوانة 9 مملوءة بالزيت ، ومكبس 8 متصل بشكل صارم بواسطة قضيب بالمكبس 7 ، صمام إبرة 12 مثبتًا على زيت خط الفائض من التجاويف g و h والربيع 10 ، والذي يصد حركة النقطة A.
مع حركة سريعة نسبيًا للمكبس IM 7 ، تتحرك الأسطوانة 9 والمكبس 8 أيضًا للأعلى ككل ، لأن مساحة تدفق الخانق 12 صغيرة وليس للزيت وقت للتدفق من التجويف g إلى التجويف h. تتحرك النقطة A من ذراع ABC لأعلى ، ويتم ضغط الزنبرك 10 ، وتعود مكابس جهاز التخزين المؤقت إلى موضعها الأصلي ، مما يوقف إمداد الزيت إلى أسطوانة IM. كان المنظم يعمل بشكل نسبي ، لكن عمله لم ينته عند هذا الحد. ستؤدي قوة الزنبرك 10 المطبق على الأسطوانة 9 عند النقطة A إلى تحريك الأخير لأسفل بالنسبة إلى المكبس الثابت 8 ؛ في هذه الحالة ، سيبدأ الزيت من التجويف g بالتدفق عبر الصمام 12 إلى التجويف h. ستبدأ النقطة A في الانخفاض ، وستنخفض النقطة B أيضًا وسيؤدي ذلك إلى تشغيل إضافي لـ MI ، أي إلى حركة إضافية من التناضح العكسي لأعلى.
سيتوقف عمل المنظم عندما يستهلك ربيع 10 كل طاقته ، أي. عندما يصل المتغير المتحكم به إلى القيمة المحددة. بطبيعة الحال ، ستعتمد سرعة المكون المتساوي للجهة المنظمة على درجة فتح الصمام 12.
أرز. 7.9 رسم تخطيطي لوحدة تحكم PI غير مباشرة: 1-منفاخ ؛ 2-بكرة. 3-مدخل زيت الضغط ؛ 4 صمام 5-استنزاف الزيت 6- الهيئة الرقابية. 7- آلية تنفيذية. 8 مكبس 9 اسطوانات 10 ربيع 11 واضعة 12 إبرة صمام.
يمكن استخدام وحدات تحكم PI في الحالات التي تتطلب دقة تحكم عالية ، للأشياء من أي سعة ، سواء مع أو بدون التسوية الذاتية ، مع تغييرات الحمل الكبيرة ولكن السلسة.
وحدة تحكم PI أسرع من أجهزة التحكم I ولكنها أبطأ من أجهزة التحكم P.
المعادلة PI - وحدة التحكم لها الشكل :.
وظيفة النقل لوحدة التحكم PI لها الشكل:.
أرز. 7.10 خصائص جهاز التحكم PI: a-static ؛ منحنى التسارع ب في منحنيات العابرين. منحنيات د العابرين قسريين لمنظمي PI و I: 1-5 نقاط تميز موقع الهيئة التنظيمية ؛ 6-10 - منحنيات عابرة.
تظهر الخاصية الثابتة لوحدة التحكم PI في الشكل. 7.10. دع وحدة التحكم يتم تكوينها بحيث تتغير القيمة التي يتم التحكم فيها ذ، التي تكون من 20 إلى 80٪ من المقياس ، يتحرك الجسم المنظم من وضع متطرف إلى آخر ( ? \ u003d 60٪) ، ودع النظام يكون في البداية في حالة توازن عند ص= 50٪ و ? = 50٪ (النقطتان 1 و 2). لنفترض أن القيمة الخاضعة للرقابة قد قفزت بنسبة تصل إلى 60٪ من المقياس (النقطة 3). بعد ذلك ، وبسبب تأثير المكون النسبي للجهة المنظمة ، سيتغير موضع المنظم بسرعة ويصل إلى ما يقرب من 68٪ من حده (النقطة 4). ثم تبدأ عقدة isodrom في العمل ببطء ، مما سيعيد القيمة المضبوطة إلى القيمة المحددة (النقطة 5) ؛ سيتوقف عمل المنظم عند الموضع الجديد للجهة المنظمة (النقطة 5 ") ، المقابلة لحوالي 73٪ من السكتة الدماغية. نظرًا لأن الحد التناسبي لا يتغير أثناء تشغيل المنظم ، يمكننا أن نستنتج أن isodrom ، كما كان ، يحرك الخاصية الثابتة الموازية لنفسها (الخط المتقطع). كما يتضح من منحنى التسارع لوحدة التحكم PI (الشكل 7.10 ، ب) ، مع اضطراب مفاجئ (انخفاض حاد في المتغير المتحكم فيه) عند في اللحظة t 0 ، يتحرك الجسم المنظم بسرعة بالقيمة تحت تأثير المكون النسبي ، ثم يستمر في التحرك في نفس الاتجاه بسرعة ثابتة (الخطوط AB) تحت تأثير مكون isodrome إذا كان في دائرة المنظم (انظر الشكل 7.9) مغلق isodrome خانق 12 ( تي أنا) ، ثم تعمل وحدة التحكم كوحدة تناسبية وخصائصها هي الخط المنقط AC في الشكل. 7.10 ب. كلما زاد فتح الخانق المتساوي ، أي أقصر وقت isodrom تي أنا، كلما زادت سرعة حركة الهيئة التنظيمية ، أي انحدار الخط AB.
يوضح الشكل 7.10 ج منحنيات عابرة مفروضة لإعدادات كسب مختلفة س 1 و الوقت تي أنامنظم. المنحنى 6 يتوافق مع العملية المؤقتة عند حجم كبير جدًا س 1 أو مع القليل جدا تي أنا. وقت العملية المؤقتة طويل ، والتذبذبات تتحلل ببطء. يمثل المنحنى 7 العبور الأمثل. المنحنى 8 يتوافق مع عملية ذات ربح ضئيل للغاية أو وقت مساوٍ طويل جدًا. العملية غير دورية ، وتستمر ببطء ، وتعود القيمة الخاضعة للرقابة ببطء إلى القيمة المحددة.
المنظمين التفاضليين
هناك نوعان من وحدات التحكم التفاضلية: مشتق - نسبي - مشتق - مشتق - متناسب - متكامل. من المناسب استخدام وحدات التحكم هذه في الحالات التي يتغير فيها حمل الكائنات الخاضعة للوائح بشكل متكرر وسريع ، وتكون التأخيرات كبيرة. معادلة تحكم PID هي:
هنا س 2 - معلمة إعداد وحدة التحكم التي تأخذ في الاعتبار معدل تغيير المتغير المتحكم فيه بمرور الوقت.
وظيفة النقل لوحدة التحكم PID لها الشكل:.
تسمى المنظمين التفاضلية المنظمين من ترقب. جوهر الترقب (بدون تأخير) على النحو التالي.
دع المعلمة الخاضعة للرقابة ذيتغير أسيًا 1 (الشكل 7.11 ، أ). المشتق الأول للمعامل (المنحنى 2) هو مماس المنحدر إلى المماس إلى النقطة المقابلة للأس 1 وله قيمة قصوى في اللحظة الأولى ، عندما يبدأ المعامل في التغيير ، وفي الوقت الحالي ر 1 عندما يتوقف التغيير هو صفر.
أرز. 7.11. خصائص المنظم مع التقدم: عملية عابرة (1) ومشتقاتها (2) ؛ ب ، ج - خيارات لتحريك الهيئة التنظيمية ؛ منظم I-for P ؛ II-for D منظم.
يمكن تعريف تأثير الترقب على النحو التالي. إذا كانت القيمة الخاضعة للرقابة ذ(الشكل 7.11 ، ب) سيغير قيمته بالقيمة A ، ثم إشارة خرج المنظم ، المقدمة إلى الهيئة التنظيمية ، سيكون لها صفة مقابلة لمنحنى صلب. للمقارنة ، يُظهر الخط المنقط عمل منظم P. في عملية التنظيم في المنظمين مع التقدم ، هناك تغيير في حدود التناسب ، كما كان. علاوة على ذلك ، في البداية يكون هذا الانحراف حادًا ، ثم يتعلق الأمر بقيمة الضبط.
مع التغيير المستمر في المتغير المتحكم فيه ذابتداء من الوقت ر 0 (الشكل 7.11 ، ج) ، سيتحرك الجسم المنظم للمنظم P وفقًا للخط المنقط أناوللمنظم D - وفقًا للخط المتصل ثانيًا. يتوقع المنظم ، كما كان ، الانحراف المتوقع للمعامل. مهلة ر صيحدد قيمة ذات صلةإشارة إضافية عن طريق المشتق (ترتبط بمعامل الإعداد) وعادة ما يتم ضبطها في النطاق من 0.1 إلى 1 دقيقة.
يتم أخذ عمل المنظم مع التقدم في الاعتبار في مثال التحكم في درجة الحرارة في عنصر التحكم ، حيث يتم استخدام الغاز الساخن كناقل حراري (الشكل 7.12 ، أ).
أرز. 7.12 رسم تخطيطي لوحدة التحكم مع مقدم (أ) ورسم بياني للعمليات العابرة لوحدات التحكم PI و PID (ب): OR- هدف التنظيم ؛ 1-3 - المزدوجات الحرارية ص - ريوستات واضع. مضخم الاتحاد الأوروبي RD - محرك عكسي التناضح العكسي هو هيئة تنظيمية.
يتكون جهاز ما قبل المفعول من المزدوجات الحرارية 1 ، 2 ، 3 ، والتي تعد عنصرًا حساسًا في المنظم. يتم توصيل المزدوجات الحرارية 1 و 2 في سلسلة (تتم إضافة قوى EMF الحرارية الخاصة بهم) ، ويتم توصيل المزدوجات الحرارية 3 في اتجاهين متعاكسين (يتم طرح EMF الحراري من مجموع الأولين). كتلة الوصلة الساخنة للمزدوجة الحرارية 3 أكبر بكثير من كتلة تقاطعات كل من أول اثنين. في حالة التوازن الحراري ، جميع الوصلات الثلاثة لها نفس درجة الحرارة وكسر يساوي TEDS. سيكون إجمالي TEDS لهذه البطارية مساويًا لـ TEDS لإحدى المزدوجات الحرارية 1 أو 2.
إذا كانت درجة الحرارة المتحكم فيها رفي كائن التحكم يبدأ في التغيير بسرعة معينة ، ثم ستعكس TEDS لأول مزدوجين حراريين بنفس المعدل هذه التغييرات ، وسيتأخر التغيير في TEDS للمزدوج الحراري 3 عن الأول والثاني ، كلما زاد الفرق في كتل الوصلات الساخنة للمزدوجات الحرارية 1 و 2 ، من ناحية ، والمزدوجة الحرارية 3 - من ناحية أخرى ، وكذلك كلما زاد معدل تغير درجة الحرارة.
وبالتالي ، تولد المزدوجة الحرارية 1 إشارة تتناسب مع المتغير المتحكم فيه نفسه (درجة الحرارة ر) والمزدوجات الحرارية 2 و 3 - إشارة تتناسب مع معدل تغيرها ( ر).
نتائج TEDS لجميع المزدوجات الحرارية الثلاثة شمقارنة مع انخفاض الجهد ش حولعلى المقاومة صنقطة الضبط ، والتي تتناسب مع القيمة المحددة للمتغير المتحكم فيه. Thermopile من ثلاث مزدوجات حرارية ومصدر طاقة ش حيتم تشغيل نقاط الضبط في اتجاهات متعاكسة. في حالة المخالفة نظام درجة الحرارةفي الكائن ، يتم تلقي إشارة عند إدخال مكبر الصوت الإلكتروني للذكاء الاصطناعي ؟ u= ش حول - ش، وفي اللحظة الأولى ، تكون قيمة الإشارة مهمة ويحرك محرك RD القابل للانعكاس بشكل مكثف CR ، ويغير بشكل حاد إمداد المبرد ، ثم عندما تكون الإشارة شبعد أن وصل إلى الحد الأقصى ، سيبدأ في الانخفاض ، سيبدأ المحرك القابل للانعكاس في تحريك RO بسلاسة إلى الجانب الآخر ، مما يقلل من إمداد المبرد ويصل المعلمة إلى القيمة المحددة.
على التين. يوضح الشكل 7.12 ب رسمًا بيانيًا للعمليات العابرة لقوانين التحكم PI و PID.
خياراكتبمنظم
تتمثل مهمة المصمم في اختيار نوع المنظم الذي من شأنه أن يوفر الجودة المطلوبة من التنظيم بأقل تكلفة وأقصى قدر من الموثوقية.
من أجل تحديد نوع المنظم وتحديد إعداداته ، تحتاج إلى معرفة:
· الخصائص الثابتة والديناميكية لعنصر التحكم.
· متطلبات جودة العملية التنظيمية.
· مؤشرات الجودة التنظيمية لمنظمي التسلسل.
· طبيعة الاضطرابات التي تؤثر على عملية التنظيم.
عادة ما يبدأ اختيار نوع وحدة التحكم بأبسط وحدات التحكم ثنائية الموضع وقد ينتهي بوحدات تحكم المعالجات الدقيقة ذاتية الضبط.
ضع في اعتبارك مؤشرات الجودة للمنظمين التسلسليين. يفترض أن تكون وحدات التحكم المستمرة التي تنفذ قوانين التحكم I و P و PI و PID هي وحدات تحكم متسلسلة.
من الناحية النظرية ، مع تعقيد قانون التنظيم ، تتحسن جودة النظام. من المعروف أن قيمة نسبة التأخير إلى ثابت الوقت للكائن ج لها التأثير الأكبر على ديناميكيات التنظيم. يمكن تمييز كفاءة التعويض عن الاضطراب المتدرج بواسطة وحدة التحكم بدقة من خلال قيمة المعامل الديناميكي للتنظيم R d ، والسرعة - بقيمة وقت التنظيم. نظريًا ، في نظام مع تأخير ، يكون الحد الأدنى لوقت التحكم هو t pvin = 2 /.
يتم تحديد الحد الأدنى من وقت التنظيم الممكن لأنواع مختلفة من المنظمين مع الإعداد الأمثل لها في الجدول 1.
الجدول 1
استرشادًا بالجدول ، يمكن القول أن قانون التحكم P يوفر أعلى سرعة. ومع ذلك ، إذا كان كسب P-controller KP صغيرًا (غالبًا ما يتم ملاحظة ذلك في الأنظمة ذات التأخير) ، فعندئذٍ تقوم وحدة التحكم هذه لا توفر دقة تحكم عالية ، لأنه في هذه الحالة يكون حجم الخطأ الثابت كبيرًا. إذا كانت KP لها قيمة 10 أو أكثر ، فإن P-controller مقبول ، وإذا كان KP<10 то требуется введение в закон управления интегральной составляющей.
الأكثر شيوعًا في الممارسة هو وحدة التحكم PI ، والتي تتمتع بالمزايا التالية:
1. يوفر صفر خطأ تحكم ثابت.
2. سهل الإعداد إلى حد ما ، حيث تم تعيين معلمتين فقط ، وهما الكسب K P وثابت التكامل T i. في وحدة التحكم هذه ، من الممكن تحسين K p / T i> max ، والذي يوفر تحكمًا بأقل خطأ ممكن في التحكم في متوسط التربيع.
3. لديها حساسية منخفضة للضوضاء في قناة القياس (على عكس جهاز التحكم PID).
بالنسبة للدوائر الأكثر أهمية ، يمكن التوصية باستخدام وحدة تحكم PID ، والتي توفر أعلى أداء في النظام. ومع ذلك ، يجب أن يؤخذ في الاعتبار أن هذا الشرط يتم استيفائه فقط من خلال الإعدادات المثلى (يتم تكوين ثلاثة معلمات). مع زيادة التأخير في النظام ، تزداد تحولات الطور السالب بشكل حاد ، مما يقلل من تأثير المكون التفاضلي لوحدة التحكم. لذلك ، تصبح جودة وحدة التحكم PID للأنظمة ذات التأخير الكبير قابلة للمقارنة مع جودة وحدة التحكم PI. بالإضافة إلى ذلك ، يؤدي وجود ضوضاء في قناة القياس في نظام به وحدة تحكم PID إلى تقلبات عشوائية كبيرة في إشارة التحكم لوحدة التحكم ، مما يزيد من تشتت خطأ التحكم. وبالتالي ، يجب اختيار وحدة التحكم PID لأنظمة التحكم بمستوى ضوضاء منخفض نسبيًا وتأخير في كائن التحكم. أنظمة التحكم في درجة الحرارة هي أمثلة على هذه الأنظمة.
عند اختيار نوع وحدة التحكم ، يوصى بالتركيز على قيمة نسبة التأخير إلى ثابت الوقت في الكائن / T. إذا / ت< 0,2, то можно выбрать релейный, непрерывный или цифровой регуляторы. Если 0,2 < /T< 1, то должен быть выбран непрерывный или цифровой, ПИ или ПИД-регулятор. Если /T >1 ، ثم يتم تحديد منظم رقمي خاص مع متنبئ ، والذي يعوض التأخير في حلقة التحكم. ومع ذلك ، يوصى أيضًا باستخدام نفس المنظم للنسب الأصغر / T.
معادلةطريقةتعريفاتالإعداداتمنظم
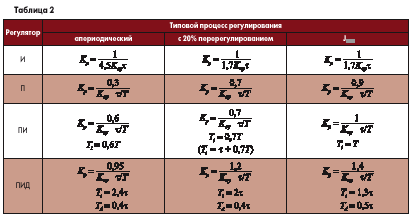
يتم استخدام الطريقة لتقدير تقريبي سريع لقيم معلمات ضبط وحدة التحكم لثلاثة أنواع من عمليات التحكم النموذجية المثلى.
الطريقة قابلة للتطبيق على كل من الكائنات الثابتة ذات المحاذاة الذاتية (الجدول 2) والكائنات بدون محاذاة ذاتية (الجدول 3).
ملحوظة: T، K oy - ثابت الوقت والتأخير وكسب الكائن.
في هذه الصيغ ، يُفترض أنه يتم ضبط وحدة تحكم ذات إعدادات تابعة ، وتتميز وظيفة النقل الخاصة بها بالشكل:
أين:
K p - كسب تحكم ؛
T i - وقت المسافة (ثابت تكامل وحدة التحكم) ؛
T d - الوقت الأولي (ثابت التفاضل).
دفعالإعداداتعلىتكررمميزاتهدف
توجد معدات خاصة للتحديد التجريبي لخاصية طور الاتساع (AFC) لكائن التحكم: يمكن استخدام هذه الخاصية لحساب إعدادات وحدة التحكم PI ، حيث يكون المعيار الرئيسي هو ضمان هوامش الاستقرار المحددة في النظام .
من الملائم توصيف هوامش الاستقرار من خلال مؤشر تذبذب النظام M ، حيث تتطابق قيمته في نظام به وحدة تحكم PI مع الحد الأقصى لخاصية تردد الاتساع لنظام مغلق. لكي لا يتجاوز هذا الحد الأقصى قيمة معينة ، يجب ألا يدخل AFC لنظام الحلقة المفتوحة داخل دائرة مركزها P 0 ونصف قطرها R ، حيث
يمكن إثبات أن الإعدادات المثلى من حيث الحد الأدنى لخطأ التحكم في جذر متوسط المربع ستكون تلك التي يكون فيها النظام الذي يحتوي على مؤشر التذبذب MM 1 أكبر معامل مع المكون المتكامل ، والذي يتوافق مع الشرط K p / T أنا> دقيقة.
في هذا الصدد ، يتكون حساب الإعدادات المثلى من مرحلتين:
1. إيجاد في مستوي المعلمتين K p و T i حدود المنطقة التي يكون للنظام فيها مؤشر تذبذب معين M 1.
2. تحديد نقطة على حدود المنطقة التي تفي بالمتطلب K p / T i.
حساب الإعدادات وفقًا لخصائص تردد الكائن. منهجية حساب إعدادات وحدة تحكم PI وفقًا لـ AFC للكائن
1. يتم إنشاء عائلة من خصائص طور الاتساع لنظام الحلقة المفتوحة من أجل K p = 1 وقيم مختلفة لـ T ij (قيم 5 -6).
2. يتم تعيين قيم مؤشر التذبذب M من نطاق 1.55 M 2.3 (يوصى باستخدام M = 1.6). من الأصل ، يتم رسم خط مستقيم OE بزاوية = arcsin (1 / M 1) ، حيث M 1 هي القيمة المحددة لمؤشر التذبذب.
3. يتم إنشاء عائلة من الدوائر ، تلامس AFC oj والخط المستقيم OE بزاوية ، ويقع مركز الدوائر دائمًا على المحور الحقيقي السلبي. نتيجة للبناء ، تم تحديد أنصاف أقطار هذه الدوائر R j.
4. لكل دائرة احسب القيمة النهائية K p
5. وفقًا لقيم K pj و K ij ، قم ببناء حدود منطقة مؤشر التذبذب المحدد.
6. على هذا الحد ، حدد النقطة التي تكون فيها نسبة K p / T i هي الحد الأقصى.
تجريبيطرقالإعداداتمنظم
بالنسبة لعدد كبير من كائنات التحكم الصناعي ، لا توجد نماذج رياضية دقيقة بما فيه الكفاية تصف خصائصها الثابتة والديناميكية. في الوقت نفسه ، يعد إجراء تجارب لإزالة هذه الخصائص مكلفًا للغاية وشاقًا.
لا تتطلب الطريقة التجريبية لضبط المنظمين معرفة النموذج الرياضي للكائن. ومع ذلك ، فمن المفترض أن النظام مثبت ويمكن تشغيله ، ومن الممكن أيضًا تغيير إعدادات وحدة التحكم. وبالتالي ، يمكن إجراء بعض التجارب لتحليل تأثير تغيير الإعدادات على ديناميكيات النظام. في نهاية المطاف مضمونة لتلقي إعدادات جيدةلنظام التحكم هذا.
هناك طريقتان للضبط - طريقة التذبذب المستمر وطريقة التذبذب المخمد.
طريقةغير مخمدتردد
في نظام التشغيل ، يتم إيقاف تشغيل المكونات المتكاملة والتفاضلية لوحدة التحكم (T i = ، T d = 0) ، أي يتم نقل النظام إلى قانون التحكم P.
من خلال زيادة K p بالتتابع مع التطبيق المتزامن لإشارة قفزة صغيرة ، تتمثل المهمة في تحقيق حدوث التذبذبات غير المثبطة في النظام مع فترة T kp. هذا يتوافق مع إحضار النظام إلى حدود الاستقرار الاهتزازي. عند حدوث هذا النمط من التشغيل ، يتم إصلاح قيم الكسب الحرج لوحدة التحكم K kp وفترة التذبذبات الحرجة في النظام T kp. عندما تظهر التقلبات الحرجة ، لا شيء متغير النظاملا ينبغي أن تذهب إلى مستوى الحد.
وفقًا لقيم T kp و K kp ، يتم حساب إعدادات وحدة التحكم:
منظم P: K p = 0.55 Kp ؛
· وحدة تحكم PI: K p = 0.45 Kp ؛ T i = T kp / 1،2 ؛
تحكم PID: K p = 0.6 K kp ؛ T i = T kp / 2 ؛ T د \ u003d T kp / 8.
يمكن إجراء حساب إعدادات وحدة التحكم وفقًا للتردد الحرج لعنصر التحكم نفسه n. بالنظر إلى أن التردد الطبيعي n لنظام التشغيل يتزامن مع تردد التذبذب الحرج لنظام مغلق مع وحدة تحكم P ، فإن القيم يمكن تحديد T kp و K kp من سعة وفترة التذبذبات الحرجة لجسم التحكم نفسه.
عندما يتم إحضار نظام مغلق إلى حدود الاستقرار الاهتزازي ، قد تتجاوز سعة التذبذب القيمة المسموح بها ، والتي بدورها ستؤدي إلى حالة طوارئ في المنشأة أو إلى إنتاج منتجات معيبة. لذلك ، لا يمكن إحضار جميع أنظمة التحكم الخاصة بالمنشآت الصناعية إلى وضع التشغيل الحرج.
طريقةبهوتتردد
يتيح لك استخدام هذه الطريقة ضبط وحدات التحكم دون تشغيل النظام في أوضاع التشغيل الحرجة. تمامًا كما في الطريقة السابقة ، بالنسبة لنظام مغلق مع وحدة تحكم P ، من خلال زيادة KP بالتتابع ، يتم تحقيق عملية عابرة لمعالجة نبضة مستطيلة وفقًا لإشارة مرجعية أو إشارة اضطراب مع تقليل التخميد D = 1/4. علاوة على ذلك ، يتم تحديد فترة هذه التذبذبات T k وقيم ثوابت التكامل والتمايز بين وحدات التحكم T i و T d.
· بالنسبة لجهاز التحكم PI: T i = T k / 6 ؛
· بالنسبة لجهاز التحكم PID: T i = T k / 6 ؛ T d = T k /1.5.
بعد تعيين القيم المحسوبة لـ T i و T d على وحدة التحكم ، من الضروري تحسين قيمة K P بشكل تجريبي للحصول على عامل التخميد D = 1/4. لهذا الغرض ، يتم إجراء تعديل إضافي لـ K P لقانون التحكم المحدد ، والذي يؤدي عادةً إلى انخفاض في K P بنسبة 20-30 ٪. تعتبر معظم أنظمة التحكم الصناعية مضبوطة جيدًا إذا كان عامل التخميد D هو 1/4 أو 1/5.
اللائحةفيالتوفرالضوضاء
يؤدي وجود مكونات ضوضاء عالية التردد في إشارة القياس إلى اهتزازات عشوائية لمشغل النظام ، مما يزيد من تشتت خطأ التحكم ويقلل من دقة التحكم. في بعض الحالات ، يمكن أن تؤدي مكونات الضوضاء القوية بالنظام إلى وضع تشغيل غير مستقر (عدم استقرار عشوائي).
في الأنظمة الصناعية ، غالبًا ما تحتوي دوائر القياس على ضوضاء مرتبطة بتردد التيار الكهربائي. في هذا الصدد ، تتمثل المهمة المهمة في الترشيح الصحيح لإشارة القياس ، فضلاً عن اختيار الخوارزمية المطلوبة ومعلمات وحدة التحكم. لهذا الغرض ، يتم استخدام مرشحات منخفضة التردد عالية المستوى (5-7) ، والتي لها منحدر كبير. يتم تضمينها في بعض الأحيان في تطبيع المحولات.
وبالتالي ، فإن المهمة الرئيسية للجهة المنظمة هي التعويض عن اضطرابات التردد المنخفض. في هذه الحالة ، من أجل الحصول على الحد الأدنى من تشتت خطأ التحكم ، يجب ترشيح الضوضاء عالية التردد. ومع ذلك، في الحالة العامة، هذه المشكلة متناقضة ، لأن أطياف الاضطراب والضوضاء يمكن فرضها على بعضها البعض. يتم حل هذا التناقض باستخدام نظرية التحكم العشوائي الأمثل ، مما يجعل من الممكن تحقيق أداء جيد في النظام بأقل قدر ممكن من التشتت لخطأ التحكم. لتقليل تأثير التداخل في المواقف العملية ، يتم استخدام طريقتين بناءً على:
· تقليل كسب وحدة التحكم K p ، أي في الواقع ، الانتقال إلى قانون التحكم المتكامل ، وهو غير حساس للضوضاء ؛
· ترشيح الإشارة المقاسة.
طرقالإعداداتعلى نحو مضاعفأنظمةاللائحة
من العدد الإجمالي لأنظمة التحكم ، حوالي 15٪ عبارة عن أنظمة تحكم متصلة بشكل مزدوج (الشكل 11). في مثل هذه الأنظمة ، حتى إذا كانت هناك عملية مستقلة ومستقرة لوحدتي تحكم ، يمكن أن يصبح النظام بأكمله غير مستقر بسبب عمل الاقتران المتقاطع في كائن التحكم.
يتم تمثيل كائن التحكم في نظام متصل بشكل مزدوج في شكل P-canonical. تكمن راحة مثل هذا التمثيل في حقيقة أنه من خلال التجربة النشطة ، من الممكن تحديد جميع وظائف النقل للقنوات المقابلة. الإشارات الوسيطة × 1 ، × 2 ، × 3 ، × 4 غير متوفرة للقياس عادة ، لذلك يتم تنفيذ التحكم وفقًا لمتجه الإخراج Y:
في الممارسة العملية ، يرتبط عدد كبير نسبيًا من الأنظمة بشكل مضاعف. من أجل تعديل موضوعي لمنظمي النظامين المتصلين ، يتم تشكيل معيار جودة النموذج:
حيث y 1 و y 2 هما معاملات الوزن (الجزاء) ، J1 و J 2 هي معايير الجودة للدائرتين الأولى والثانية. من خلال إعادة توزيع معاملات الوزن y 1 و y 2 ، من الممكن تحديد كفاف أكثر أهمية ، حيث يجب أن تكون جودة عمليات التحكم أعلى. على سبيل المثال ، إذا كان يجب أن توفر الدائرة الأولى دقة أعلى ، فيجب زيادة y 1. تتمثل مهمة ضبط وحدة التحكم في توفير الحد الأدنى لقيمة J 0 للنظام لكل من y 1 و y 2 ، حيث
دعونا نفكر في طرق مختلفة لضبط المنظمين في نظامين متصلين.
وثائق مماثلة
المخططات الهيكلية للمنظمين الأوتوماتيكي مع محركات مؤازرة نموذجية ، تعيد إنتاج قوانين التنظيم الرئيسية بطريقة التصحيح المتوازي والمتسلسل. استجابة خطوة وحدة تحكم PD والإعدادات والمخططات الوظيفية.
الملخص ، تمت الإضافة في 02/27/2009
طريقة النبضنطاق الإشارة وقياسات التردد. تقدير سعة الإشارة القطعية. الدقة المحتملة في قياس الإحداثيات الزاوية. مشكلة التصفية غير الخطية لمعلمات الإشارة. استجابة دافعة التصفية المثلى.
الملخص ، تمت الإضافة في 10/13/2013
إيجاد تحويلات فورييه المنفصلة لإشارة معينة منفصلة. أطياف الإشارة من جانب واحد ومن جانبين. حساب عينات إشارة منفصلة من الطيف الذي تم الحصول عليه. إعادة بناء إشارة تناظرية من طيف إشارة منفصلة.
ورقة مصطلح ، تمت الإضافة في 12/03/2009
تحلل وظيفة دورية غير جيبية في سلسلة فورييه ؛ أطياف السعة والمرحلة لإشارة الإدخال. المعلمات المميزة للرباعي عند تردد الإشارة. حساب المكسب من شرط أقل توهين من التوافقي الأساسي.
الاختبار ، تمت إضافة 2012/09/19
تعريف مفهوم القواطع والغرض منها ووظيفتها. تصنيفها وفقًا لنوع تيار الدائرة الرئيسية ، ووجود جهات اتصال مجانية ، وطريقة توصيل الموصلات الخارجية ونوع محرك الأقراص. مبدأ التشغيل وخصائص المفتاح.
الاختبار ، تمت إضافة 10/19/2011
الشكل الرياضي الأصلي لسلسلة فورييه. طيف من الإشارات التوافقية البسيطة ، الإشارة التناظرية الدورية ، الإشارة الدورية الثنائية. تمثيل رسومي لحجم الإشارة. تعديل السعة. تعديل السعة النبضية.
الملخص ، تمت الإضافة في 08/07/2008
ميزة القواطع على الصمامات. القواطعمع الإصدارات الكهرومغناطيسية والحرارية والمشتركة وتصميمها ومبدأ عملها. ميزات اختيار المفاتيح التلقائية.
الملخص ، تمت الإضافة في 02/27/2009
حساب ورسم بياني للجهد عند خرج الدائرة. الكثافة الطيفية للإشارة عند المدخلات والمخرجات. تقدير إشارة الإدخال والاستجابة النبضية للدائرة. الكثافة الطيفية لإشارة الإدخال. حساب إشارة منفصلة عند خرج المصحح.
ورقة مصطلح ، تمت إضافة 11/21/2011
خصائص الطريقة الطيفية لتحليل الإشارة ، والتي يمكنك من خلالها تقييم التركيب الطيفي للإشارة ، وكذلك تحديد أداء الطاقة من الناحية الكمية. تحليل ارتباط الإشارة لتقييم مرور الإشارة عبر الهواء.
ورقة المصطلح ، تمت الإضافة 07/17/2010
تصنيف المستشعرات حسب مبدأ تحويل الكميات الكهربائية وغير الكهربائية ونوع إشارة الخرج. مبدأ تشغيل المستشعرات الحرارية ، أساسه على العمليات الحرارية. المزدوجات الحرارية المقاومة ، موازين الحرارة المانومترية.
المنظمين الآليين في أنظمة التحكم وإعدادها. الجزء 2. المنظمون الآليون وإعداداتهم. معلومات عامة عن أنظمة التحكم الصناعية
تتمثل المهمة الرئيسية لأنظمة التحكم في تثبيت معلمات العملية عند مستوى معين تحت تأثير التأثيرات الخارجية المزعجة التي تعمل على كائن التحكم. يتم ذلك عن طريق أنظمة التثبيت التلقائي. مهمة أخرى لا تقل أهمية هي مهمة توفير انتقال البرنامج إلى أنماط تشغيل جديدة. يتم حل هذه المشكلة باستخدام نفس نظام التثبيت ، والذي يختلف إعداده من مولد البرنامج.
يظهر الرسم التخطيطي للكتلة لنظام أحادي الحلقة AR بواسطة كائن التحكم في الشكل 1. عناصره الرئيسية هي: AR - منظم تلقائي ، UM - مضخم طاقة ، IM - مشغل ، RO - جسم منظم ، SOU - كائن التحكم نفسه ، D - sensor ، NP - محول التطبيع ، ZD - setter ، ES - عنصر المقارنة.
المتغيرات: Yz - إشارة الإعداد ، خطأ التحكم الإلكتروني ، UP - إشارة الخرج للمنظم ، U y - جهد التحكم ، h - حركة المنظم ، Q r - استهلاك المادة أو الطاقة ، F - التأثير المزعج ، T - قابل للتعديل المعلمة ، Y OS - إشارة التغذية المرتدة (جهد خرج محول الطاقة أو التيار).
يؤدي محول التطبيع الوظائف التالية:
يحول إشارة مستشعر غير قياسية إلى إشارة خرج قياسية ؛
ينفذ تصفية الإشارة ؛
ينفذ خطيًا للخاصية الثابتة لجهاز الاستشعار من أجل الحصول على نطاق خطي.
لأغراض الحساب ، يتم تبسيط الدائرة الأصلية للدائرة الموضحة في الشكل 2 ، حيث AR هي وحدة التحكم ، ونظام التشغيل هو كائن التحكم.
اختيار قناة التحكم
يمكن التحكم في نفس معلمة الإخراج لكائن ما بواسطة قنوات إدخال مختلفة.
عند اختيار قناة التحكم المرغوبة ، تؤخذ الاعتبارات التالية في الاعتبار:
من جميع إجراءات التحكم الممكنة ، يتم تحديد تدفق المادة أو الطاقة هذا أو توفيره أو إزالته من الكائن ، حيث يؤدي الحد الأدنى من التغيير إلى التغيير الأقصى في القيمة الخاضعة للرقابة ، أي يجب أن يكون الكسب على القناة المحددة ، إن أمكن ، كحد أقصى. بعد ذلك ، في هذه القناة ، يمكنك تقديم التنظيم الأكثر دقة.
يجب أن يكون نطاق التغيير المسموح به في إشارة التحكم كافياً للتعويض الكامل عن الحد الأقصى من الاضطرابات المحتملة التي تنشأ في هذه العملية ، أي يجب توفير هامش من قوة التحكم في هذه القناة.
يجب أن تتمتع القناة المحددة بخصائص ديناميكية مواتية ، أي التأخير 0 والنسبة 0 / T 0 ، حيث T 0 هي ثابت الوقت للكائن ، يجب أن تكون صغيرة قدر الإمكان. بالإضافة إلى ذلك ، يجب أن يكون التغيير في المعلمات الثابتة والديناميكية للكائن على طول القناة المحددة مع تغيير في الحمل أو بمرور الوقت غير مهم.
المؤشرات الرئيسية للجودة التنظيمية
تُفرض المتطلبات على أنظمة التحكم الآلي ، ليس فقط من أجل استقرار عمليات التحكم على النطاق الكامل للأحمال على الكائن ، ولكن أيضًا لضمان مؤشرات جودة معينة لعملية التحكم الآلي.
خطأ في التنظيم (مكونات إحصائية أو مكونات جذر متوسط التربيع).
تنظيم الوقت.
تجاوز.
مؤشر التقلب.
عامل التحكم الديناميكي R d ، والذي يتم تحديده من الصيغة
حيث يكون معنى الكميات Y 0 و Y 1 واضحًا من الشكل 3.
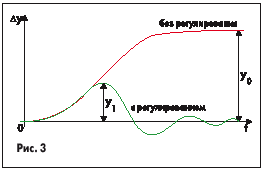
تحدد قيمة R d درجة تأثير المنظم على العملية ، أي درجة انخفاض الانحراف الديناميكي في النظام مع وبدون المنظم.
يعتمد مقدار التجاوز على نوع الإشارة المعالجة. عند تنفيذ إجراء الخطوة وفقًا لإشارة المهمة ، يتم تحديد قيمة التجاوز بواسطة الصيغة
حيث تظهر قيم X m و X y في الشكل 4.
عند العمل على التأثير المزعج ، يتم تحديد قيمة التجاوز من العلاقة
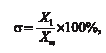
حيث تظهر قيم X m و X y في الشكل 5
وقت التحكم- هذا هو الوقت الذي تبدأ فيه القيمة المضبوطة في العملية العابرة بالاختلاف عن القيمة الثابتة بأقل من القيمة المحددة مسبقًا ، حيث هي دقة التحكم. يتم اختيار إعدادات وحدة التحكم لتوفير إما الحد الأدنى من القيمة الممكنة لوقت التنظيم الإجمالي ، أو الحد الأدنى لقيمة النصف الأول من الموجة العابرة.
في بعض أنظمة AP ، يحدث خطأ لا يختفي حتى بعد فترة طويلة من الزمن - هذا خطأ تحكم ثابت- ق.
بالنسبة للمنظمين مع مكون متكامل ، فإن الأخطاء في الحالة المستقرة تساوي نظريًا الصفر ، ولكن يمكن أن توجد أخطاء غير مهمة عمليًا بسبب وجود مناطق ميتة في عناصر النظام.
مؤشر الاهتزاز ميميز حجم المعامل الأقصى لوظيفة نقل التردد لنظام مغلق (عند تردد الرنين) ، وبالتالي ، يميز الخصائص التذبذبية للنظام. تم توضيح مؤشر التقلب بوضوح في الرسم البياني في الشكل 6.
يعتبر بشكل مشروط أن قيمة M = 1.51.6 هي الأمثل للأنظمة الصناعية ، لأنه في هذه الحالة يتم توفيرها في النطاق من 20 إلى 40٪. مع زيادة M ، يزداد التذبذب في النظام.
في بعض الحالات ، يتم تطبيع عرض النطاق الترددي للنظام p ، والذي يتوافق مع مستوى الكسب في نظام مغلق يبلغ 0.05. كلما زاد عرض النطاق الترددي ، زادت سرعة النظام المغلق. ومع ذلك ، فإن هذا يزيد من حساسية النظام للضوضاء في قناة القياس ويزيد من تشتت خطأ التحكم.
عند تعديل المنظمين ، يمكنك الحصول على عدد كبير نسبيًا من العابرين التي تفي بالمتطلبات المحددة. وبالتالي ، هناك بعض عدم اليقين في اختيار القيم المحددة لإعدادات وحدة التحكم. من أجل القضاء على عدم اليقين هذا وتسهيل حساب الإعدادات ، يتم تقديم مفهوم عمليات التحكم النموذجية المثلى.
هناك ثلاث عمليات نموذجية:
عملية غير دورية مع الحد الأدنى من وقت التحكم (الشكل 7). تفترض هذه العملية النموذجية أن الاضطراب F (نظام التثبيت التلقائي) قيد الإعداد. في هذه الحالة ، يتم تحديد الإعدادات بحيث يكون وقت التحكم t p ضئيلاً. يستخدم هذا النوع من العمليات النموذجية على نطاق واسع لإنشاء أنظمة لا تسمح بالتقلبات في نظام التحكم المغلق.
عملية مع تجاوز 20٪ والحد الأدنى من الوقت من نصف الدورة الأولى (الشكل 8). تُستخدم هذه العملية لضبط معظم البنادق ذاتية الدفع الصناعية ، لأنها تجمع بين سرعة عالية إلى حد ما (t1 = min) مع تذبذب محدود ( = 20٪).
عملية توفر حدًا أدنى من معيار الجودة المتكاملة (الشكل 9). يتم التعبير عن معيار الجودة المتكاملة بواسطة الصيغة
أين البريد هو خطأ التحكم.
تشمل مزايا هذه العملية السرعة العالية (نصف الموجة الأول) مع تذبذب كبير إلى حد ما. بالإضافة إلى ذلك ، يمكن إجراء تحسين هذا المعيار فيما يتعلق بإعدادات وحدة التحكم بشكل تحليلي أو رقمي أو عن طريق النمذجة (على جهاز AVM).
مخطط كتلة نموذجي للمنظم
يتكون المنظم الأوتوماتيكي (الشكل 10) من: ذاكرة - جهاز رئيسي ، SU - جهاز مقارنة ، UPA - جهاز تحويل تضخيم ، BN - وحدة ضبط.
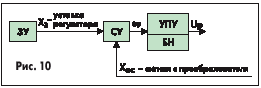
يجب أن يولد جهاز القيادة إشارة مرجعية ثابتة للغاية (إعداد وحدة التحكم) أو يغيرها وفقًا لبرنامج معين. يتيح المقارنة مقارنة الإشارة المرجعية بإشارة التغذية الراجعة وبالتالي تكوين قيمة خطأ التحكم e p. يتكون جهاز تحويل التضخيم من كتلة لتوليد خوارزمية تحكم ، وكتلة لتعيين معلمات هذه الخوارزمية ، ومضخم طاقة.
تصنيف المنظمين
يتم تصنيف المنظمين الآليين وفقًا للغرض منها ، ومبدأ التشغيل ، وخصائص التصميم ، ونوع الطاقة المستخدمة ، وطبيعة التغيير في الإجراء التنظيمي ، وما إلى ذلك.
وفقًا لمبدأ التشغيل ، يتم تقسيمهم إلى منظمين للعمل المباشر وغير المباشر. لا تستخدم منظمات العمل المباشر الطاقة الخارجية لعمليات التحكم ، ولكنها تستخدم طاقة كائن التحكم نفسه (البيئة المنظمة). ومن الأمثلة على هذه المنظمات منظمات الضغط. في المنظمين الأوتوماتيكي للعمل غير المباشر ، يلزم وجود مصدر طاقة خارجي لتشغيله.
وفقًا لطبيعة الإجراء ، يتم تقسيم الهيئات التنظيمية إلى مستمرة ومنفصلة. وحدات التحكم المنفصلة ، بدورها ، مقسمة إلى مرحل ورقمي ونبض.
وفقًا لنوع الطاقة المستخدمة ، يتم تقسيمها إلى طاقة إلكترونية وهوائية وهيدروليكية وميكانيكية ومجتمعة. يتم تحديد اختيار المنظم وفقًا لنوع الطاقة المستخدمة من خلال طبيعة موضوع التنظيم وميزات النظام التلقائي.
وفقًا لقانون التحكم ، يتم تقسيمها إلى وحدات تحكم ثنائية وثلاثية المواضع ، وحدات تحكم نموذجية (وحدات تحكم متكاملة ، متناسبة ، متناسبة - تفاضلية ، متناسبة - متكاملة ومتناسبة - متكاملة - تفاضلية - مختصرة I ، P ، PD ، PI و PID وحدات تحكم) ، وحدات تحكم ذات هيكل متغير ، قابلة للتكيف (ضبط ذاتي) وأجهزة تحكم مثالية. تُستخدم المنظمات ذات الوضعين على نطاق واسع نظرًا لبساطتها وتكلفتها المنخفضة.
وفقًا لنوع الوظائف التي يتم إجراؤها ، يتم تقسيم المنظمين إلى منظمات تثبيت تلقائي ، وبرامج ، وتصحيحية ، ومنظمات نسبة المعلمات وغيرها.
اختيار نوع المنظم
تتمثل مهمة المصمم في اختيار نوع المنظم الذي من شأنه أن يوفر الجودة المطلوبة من التنظيم بأقل تكلفة وأقصى قدر من الموثوقية.
من أجل تحديد نوع المنظم وتحديد إعداداته ، تحتاج إلى معرفة:
الخصائص الثابتة والديناميكية لكائن التحكم.
متطلبات جودة العملية التنظيمية.
مؤشرات الجودة التنظيمية للمنظمين التسلسليين.
طبيعة الاضطرابات التي تؤثر على عملية التنظيم.
عادة ما يبدأ اختيار نوع وحدة التحكم بأبسط وحدات التحكم ثنائية الموضع وقد ينتهي بوحدات تحكم المعالجات الدقيقة ذاتية الضبط.
ضع في اعتبارك مؤشرات الجودة للمنظمين التسلسليين. يفترض أن تكون وحدات التحكم المستمرة التي تنفذ قوانين التحكم I و P و PI و PID هي وحدات تحكم متسلسلة.
من الناحية النظرية ، مع تعقيد قانون التنظيم ، تتحسن جودة النظام. من المعروف أن قيمة نسبة التأخير إلى ثابت الوقت للكائن ج لها التأثير الأكبر على ديناميكيات التنظيم. يمكن وصف كفاءة التعويض عن الاضطراب المتدرج من قبل المنظم بدقة من خلال قيمة المعامل الديناميكي للتنظيم R d ، والسرعة - بقيمة وقت التنظيم. نظريًا ، في نظام مع تأخير ، يكون الحد الأدنى لوقت التحكم هو t pvin = 2 /.
الحد الأدنى من وقت التنظيم الممكن لـ أنواع مختلفةيتم تحديد المنظمين مع الإعداد الأمثل لهم من خلال الجدول 1.
الجدول 1
استرشادًا بالجدول ، يمكن القول أن قانون التحكم P يوفر أعلى سرعة. ومع ذلك ، إذا كان كسب P-controller KP صغيرًا (غالبًا ما يتم ملاحظة ذلك في الأنظمة ذات التأخير) ، فعندئذٍ تقوم وحدة التحكم هذه لا توفر دقة تحكم عالية ، لأنه في هذه الحالة يكون حجم الخطأ الثابت كبيرًا. إذا كانت KP لها قيمة 10 أو أكثر ، فإن P-controller مقبول ، وإذا كان KP<10 то требуется введение в закон управления интегральной составляющей.
الأكثر شيوعًا في الممارسة هو وحدة التحكم PI ، والتي تتمتع بالمزايا التالية:
يوفر صفر خطأ تحكم ثابت.
من السهل إعداده إلى حد ما ، حيث يتم تعيين معلمتين فقط ، وهما الكسب K P وثابت التكامل T i. في وحدة التحكم هذه ، من الممكن تحسين K p / T i> max ، والذي يوفر تحكمًا بأقل خطأ ممكن في التحكم في متوسط التربيع.
حساسية منخفضة للضوضاء في قناة القياس (على عكس جهاز التحكم PID).
بالنسبة للدوائر الأكثر أهمية ، يمكن التوصية باستخدام وحدة تحكم PID ، والتي توفر أعلى أداء في النظام. ومع ذلك ، يجب أن يؤخذ في الاعتبار أن هذا الشرط يتم استيفائه فقط من خلال الإعدادات المثلى (يتم تكوين ثلاثة معلمات). مع زيادة التأخير في النظام ، تزداد تحولات الطور السالب بشكل حاد ، مما يقلل من تأثير المكون التفاضلي لوحدة التحكم. لذلك ، تصبح جودة وحدة التحكم PID للأنظمة ذات التأخير الكبير قابلة للمقارنة مع جودة وحدة التحكم PI. بالإضافة إلى ذلك ، يؤدي وجود ضوضاء في قناة القياس في نظام به وحدة تحكم PID إلى تقلبات عشوائية كبيرة في إشارة التحكم لوحدة التحكم ، مما يزيد من تشتت خطأ التحكم. وبالتالي ، يجب اختيار وحدة التحكم PID لأنظمة التحكم بمستوى ضوضاء منخفض نسبيًا وتأخير في كائن التحكم. أنظمة التحكم في درجة الحرارة هي أمثلة على هذه الأنظمة.
عند اختيار نوع وحدة التحكم ، يوصى بالتركيز على قيمة نسبة التأخير إلى ثابت الوقت في الكائن / T. إذا / ت< 0,2, то можно выбрать релейный, непрерывный или цифровой регуляторы. Если 0,2 </T< 1, то должен быть выбран непрерывный или цифровой, ПИ или ПИД-регулятор. Если/T >1 ، ثم يتم تحديد منظم رقمي خاص مع متنبئ ، والذي يعوض التأخير في حلقة التحكم. ومع ذلك ، يوصى باستخدام نفس المنظم بنسب أصغر / T.
طريقة الصيغة لتحديد إعدادات وحدة التحكم
يتم استخدام الطريقة لتقدير تقريبي سريع لقيم معلمات ضبط وحدة التحكم لثلاثة أنواع من عمليات التحكم النموذجية المثلى.
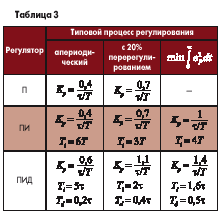
الطريقة قابلة للتطبيق على كل من الكائنات الثابتة ذات المحاذاة الذاتية (الجدول 2) والكائنات بدون محاذاة ذاتية (الجدول 3).
ملحوظة: T، ، K oy - ثابت الوقت والتأخير وكسب الكائن.
في هذه الصيغ ، يُفترض أنه يتم ضبط وحدة تحكم ذات إعدادات تابعة ، وتتميز وظيفة النقل الخاصة بها بالشكل:
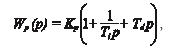
K p - كسب تحكم ؛
T i -isodrome time (ثابت تكامل وحدة التحكم) ؛
T d هو المهلة الزمنية (ثابت التمايز).
حساب الإعدادات وفقًا لخصائص تردد الكائن
توجد معدات خاصة للتحديد التجريبي لخاصية طور الاتساع (AFC) لكائن التحكم: يمكن استخدام هذه الخاصية لحساب إعدادات وحدة التحكم PI ، حيث يكون المعيار الرئيسي هو ضمان هوامش الاستقرار المحددة في النظام .
من الملائم توصيف هوامش الاستقرار من خلال مؤشر تذبذب النظام M ، حيث تتطابق قيمته في نظام به وحدة تحكم PI مع الحد الأقصى لخاصية تردد الاتساع لنظام مغلق. لكي لا يتجاوز هذا الحد الأقصى قيمة معينة ، يجب ألا يدخل AFC لنظام الحلقة المفتوحة داخل دائرة مركزها P 0 ونصف قطرها R ، حيث
يمكن إثبات أن الإعدادات المثلى من حيث الحد الأدنى لخطأ التحكم في جذر متوسط المربع ستكون تلك التي سيكون فيها النظام الذي يحتوي على مؤشر التذبذب MM 1 أكبر معامل مع المكون المتكامل ، والذي يتوافق مع الشرط ك p / تي أنا> دقيقة.
في هذا الصدد ، يتكون حساب الإعدادات المثلى من مرحلتين:
إيجاد في مستوي المعلمتين K p و T i ، حدود المنطقة التي يكون للنظام فيها مؤشر تذبذب معين M 1.
من خلال تحديد نقطة على حدود المنطقة التي تفي بالمتطلب K p / T i.
حساب الإعدادات وفقًا لخصائص تردد الكائن. منهجية حساب إعدادات وحدة تحكم PI وفقًا لـ AFC للكائن
يتم إنشاء عائلة من خصائص طور الاتساع لنظام مفتوح من أجل K p = 1 و قيم مختلفة T ij (قيم 5-6).
يتم تعيين قيم مؤشر الاهتزاز M من نطاق 1.55 ميكرومتر × 2.3 (يوصى باستخدام M = 1.6). يتم رسم خط مستقيم OE من أصل الإحداثيات بزاوية = arcsin (1 / M 1) ، حيث M 1 هي القيمة المحددة لمؤشر التذبذب.
يتم إنشاء عائلة من الدوائر التي تلامس AFC oj والخط المستقيم OE بزاوية ، ويقع مركز الدوائر دائمًا على المحور الحقيقي السلبي. نتيجة للبناء ، تم تحديد أنصاف أقطار هذه الدوائر R j.
لكل دائرة احسب القيمة النهائية K p
تبني قيم K pj و K ij حدود منطقة مؤشر تذبذب معين.
على هذا الحد ، يتم تحديد النقطة التي تكون فيها نسبة K p / T i هي القصوى.
طرق تجريبية لضبط المنظم
بالنسبة لعدد كبير من كائنات التحكم الصناعي ، لا توجد نماذج رياضية دقيقة بما فيه الكفاية تصف خصائصها الثابتة والديناميكية. في الوقت نفسه ، يعد إجراء تجارب لإزالة هذه الخصائص مكلفًا للغاية وشاقًا.
لا تتطلب الطريقة التجريبية لضبط المنظمين معرفة النموذج الرياضي للكائن. ومع ذلك ، فمن المفترض أن النظام مثبت ويمكن تشغيله ، ومن الممكن أيضًا تغيير إعدادات وحدة التحكم. وبالتالي ، يمكن إجراء بعض التجارب لتحليل تأثير تغيير الإعدادات على ديناميكيات النظام. في النهاية ، يتم ضمان الإعدادات الجيدة لنظام تحكم معين.
هناك طريقتان للضبط - طريقة التذبذب غير المخمد وطريقة التذبذب المخمد.
طريقة التذبذب المستمر
في نظام التشغيل ، يتم إيقاف تشغيل المكونات المتكاملة والتفاضلية لوحدة التحكم (T i = ، T d = 0) ، أي يتم نقل النظام إلى قانون التحكم P.
من خلال زيادة K p بالتتابع مع التطبيق المتزامن لإشارة قفزة صغيرة ، تتمثل المهمة في تحقيق حدوث التذبذبات غير المثبطة في النظام مع فترة T kp. هذا يتوافق مع إحضار النظام إلى حدود الاستقرار الاهتزازي. عند حدوث هذا النمط من التشغيل ، يتم إصلاح قيم الكسب الحرج لوحدة التحكم K kp وفترة التذبذبات الحرجة في النظام T kp. عندما تظهر تقلبات حرجة ، لا ينبغي أن يذهب متغير واحد من النظام إلى مستوى الحد.
وفقًا لقيم T kp و K kp ، يتم حساب إعدادات وحدة التحكم:
منظم P: K p = 0.55 Kp ؛
تحكم PI: K p = 0.45 K kp ؛ T i = T kp / 1،2 ؛
تحكم PID: K p = 0.6 K kp ؛ T i = T kp / 2 ؛ T د \ u003d T kp / 8.
يمكن إجراء حساب إعدادات وحدة التحكم وفقًا للتردد الحرج لعنصر التحكم نفسه ص. مع الأخذ في الاعتبار أن التردد الطبيعي لنظام التشغيل يتزامن مع تردد التذبذب الحرج لنظام مغلق مع وحدة تحكم P ، فإن القيم يمكن تحديد T kp و K kp من اتساع وفترة التذبذبات الحرجة كائن التحكم المناسب.
عندما يتم إحضار نظام مغلق إلى حدود الاستقرار الاهتزازي ، قد تتجاوز سعة التذبذب القيمة المسموح بها ، والتي بدورها ستؤدي إلى حالة طوارئ في المنشأة أو إلى إنتاج منتجات معيبة. لذلك ، لا يمكن إحضار جميع أنظمة التحكم الخاصة بالمنشآت الصناعية إلى وضع التشغيل الحرج.
طريقة التذبذب المخمد
يتيح لك استخدام هذه الطريقة ضبط وحدات التحكم دون تشغيل النظام في أوضاع التشغيل الحرجة. تمامًا كما في الطريقة السابقة ، بالنسبة لنظام مغلق مع وحدة تحكم P ، من خلال زيادة KP بالتتابع ، يتم تحقيق عملية عابرة لمعالجة نبضة مستطيلة وفقًا لإشارة مرجعية أو إشارة اضطراب مع تقليل التخميد D = 1/4. علاوة على ذلك ، يتم تحديد فترة هذه التذبذبات T k وقيم ثوابت التكامل والتمايز بين وحدات التحكم T i و T d.
لوحدة تحكم PI: T i = T k / 6 ؛
بالنسبة لوحدة التحكم PID: T i = T k / 6 ؛ T d = T k /1.5.
بعد تعيين القيم المحسوبة لـ T i و T d على وحدة التحكم ، من الضروري تحسين قيمة K P بشكل تجريبي للحصول على عامل التخميد D = 1/4. لهذا الغرض ، يتم إجراء تعديل إضافي لـ K P لقانون التحكم المحدد ، والذي يؤدي عادةً إلى انخفاض في K P بنسبة 20-30٪. تعتبر معظم أنظمة التحكم الصناعية مضبوطة جيدًا إذا كان عامل التخميد D هو 1/4 أو 1/5.
التنظيم في وجود ضوضاء
يؤدي وجود مكونات ضوضاء عالية التردد في إشارة القياس إلى اهتزازات عشوائية لمشغل النظام ، مما يزيد من تشتت خطأ التحكم ويقلل من دقة التحكم. في بعض الحالات ، يمكن أن تؤدي مكونات الضوضاء القوية بالنظام إلى وضع تشغيل غير مستقر (عدم استقرار عشوائي).
في الأنظمة الصناعية ، غالبًا ما تحتوي دوائر القياس على ضوضاء مرتبطة بتردد التيار الكهربائي. في هذا الصدد ، تتمثل المهمة المهمة في الترشيح الصحيح لإشارة القياس ، فضلاً عن اختيار الخوارزمية المطلوبة ومعلمات وحدة التحكم. لهذا الغرض ، يتم استخدام مرشحات عالية التردد منخفضة التردد (5-7) ، والتي لها ميل كبير. يتم تضمينها في بعض الأحيان في تطبيع المحولات.
وبالتالي ، فإن المهمة الرئيسية للجهة المنظمة هي التعويض عن اضطرابات التردد المنخفض. في هذه الحالة ، من أجل الحصول على الحد الأدنى من تشتت خطأ التحكم ، يجب ترشيح الضوضاء عالية التردد. ومع ذلك ، في الحالة العامة ، هذه المشكلة متناقضة ، حيث يمكن فرض أطياف الاضطراب والضوضاء على بعضها البعض. يتم حل هذا التناقض باستخدام نظرية التحكم العشوائي الأمثل ، مما يجعل من الممكن تحقيق سرعة جيدة في النظام بأقل قدر ممكن من التشتت لخطأ التحكم. لتقليل تأثير التداخل في المواقف العملية ، يتم استخدام طريقتين بناءً على:
تقليل كسب وحدة التحكم K p ، أي في الواقع ، الانتقال إلى قانون التنظيم المتكامل ، وهو غير حساس للضوضاء ؛
ترشيح الإشارة المقاسة.
طرق إنشاء أنظمة تحكم مزدوجة
من الرقم الإجماليأنظمة التحكم ، حوالي 15٪ عبارة عن أنظمة تحكم متصلة بشكل مزدوج (الشكل 11). في مثل هذه الأنظمة ، حتى إذا كانت هناك عملية مستقلة ومستقرة لوحدتي تحكم ، يمكن أن يصبح النظام بأكمله غير مستقر بسبب عمل الاقتران المتقاطع في كائن التحكم.
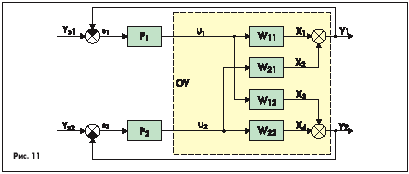
يتم تمثيل كائن التحكم في نظام متصل بشكل مزدوج في شكل P-canonical. تكمن راحة مثل هذا التمثيل في حقيقة أنه من خلال التجربة النشطة ، من الممكن تحديد جميع وظائف النقل للقنوات المقابلة. الإشارات الوسيطة × 1 ، × 2 ، × 3 ، × 4 غير متوفرة للقياس عادة ، لذلك يتم تنفيذ التحكم وفقًا لمتجه الإخراج Y:
في الممارسة العملية ، يرتبط عدد كبير نسبيًا من الأنظمة بشكل مضاعف. من أجل تعديل موضوعي لمنظمي النظامين المتصلين ، يتم تشكيل معيار جودة النموذج:
حيث y 1 و y 2 هما معاملات الوزن (الجزاء) ، J1 و J 2 هي معايير الجودة للدائرتين الأولى والثانية.
من خلال إعادة توزيع معاملات الوزن y 1 و y 2 ، من الممكن تحديد كفاف أكثر أهمية ، حيث يجب أن تكون جودة عمليات التحكم أعلى. على سبيل المثال ، إذا كان يجب أن توفر الدائرة الأولى دقة أعلى ، فيجب زيادة y 1.
تتمثل مهمة ضبط وحدة التحكم في توفير الحد الأدنى لقيمة J 0 للنظام لكل من y 1 و y 2 ، حيث
دعونا نفكر في طرق مختلفة لضبط المنظمين في نظامين متصلين.
طريقة المنظم دون اتصال بالإنترنت
في هذه الحالة ، يتم ضبط المنظمين P 1 و P 2 بالتتابع ، دون مراعاة التأثيرات المتبادلة للدوائر. إجراء الإعداد هو كما يلي:
يتم تبديل المنظم P 2 إلى الوضع اليدوي ؛
يتم ضبط المنظم P 1 بحيث يكون المعيار J 1 في حده الأدنى ؛
يتم إيقاف تشغيل المنظم المعدل P 1 وتشغيل المنظم P 2 ؛
المعدل P 2 ، مما يوفر الحد الأدنى من J 2 ؛
كلا الضوابط نشطة.
هناك تأثير متبادل صغير للخطوط ؛
سرعة إحدى الدوائر أعلى بكثير من الأخرى (يتم فصل الدوائر بواسطة الترددات) ؛
في الروابط المتقاطعة ، يكون لإحدى وظائف النقل معامل نقل أقل بكثير من الأخرى ، أي أنه لوحظ تأثير من جانب واحد.
قوانين التنظيم الآلي
قد يتضح أن بعض الأنظمة الأوتوماتيكية جيدة والبعض الآخر سيء ، لذلك يبدو أنه يجب دائمًا استخدام أفضلها فقط ، بينما لا ينبغي أن يكون البعض الآخر سيئًا. ونتحدث. تحتاج أولاً إلى معرفة ما يعتبر جيدًا وما هو الأنظمة التلقائية السيئة. بشكل عام ، المنظم التلقائي الجيد هو الذي يوفر ما يكفي أداء جيدعملية التحكم الآلي وفي نفس الوقت بسيطة في التصميم. يجب أن يؤخذ في الاعتبار أيضًا أن كائنات التنظيم المختلفة لها خصائص مختلفة ، وبالتالي فإن المنظم التلقائي الذي يضمن التشغيل المرضي لأحدهم قد يكون غير مناسب للآخر. يجب أيضًا مراعاة ذلك عند اختيار نوع نظام التحكم الآلي. لذلك ، في حالات مختلفة ، يمكن اعتبار الأنظمة الأوتوماتيكية المختلفة هي الأفضل. في بعض الحالات ، يمكنك التعامل مع الأبسط ، بينما في حالات أخرى ، يتطلب الأمر المزيد. أنظمة معقدةالتنظيم التلقائي.
تتمثل مهمة النظام التلقائي ، كما لوحظ بالفعل ، في الحفاظ على القيمة المحددة للمتغير المتحكم فيه y (t) أو تغييره وفقًا لقانون معين ، والذي تم تحديده مسبقًا أو اعتمادًا على التغييرات في الظروف الخارجية.
يمكن أن تكون البرامج وظائف زمنية y = y (t) أو حدودي y = y (s1، s2،.. t).
مثال على برنامج زمني يمكن أن يكون برنامجًا لتغيير المتغير المتحكم فيه ، والذي يوفر وضعًا معينًا للتسريع الأولي للكائن المتحكم فيه عند بدء التشغيل حتى بداية التشغيل العادي. على سبيل المثال ، وحدة التحكم في سرعة العمود المرفقي لقاطرة الديزل. في الكل أجهزة مماثلةكجزء من المنظم التلقائي أو النظام التلقائي ، يوجد جهاز برمجة يتم فيه تحميل برنامج الوقت المطلوب مسبقًا.
مثال على برنامج تحكم آلي حدودي يمكن أن يكون تحديد السرعة المطلوبة لقاطرة مع قطار ليس في الوقت المناسب ، ولكن اعتمادًا على المسافة المقطوعة ، من أجل الوصول إلى محطة معينة في وقت معين.
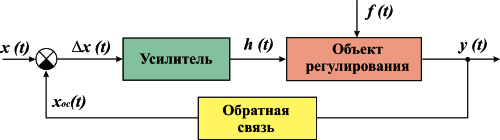
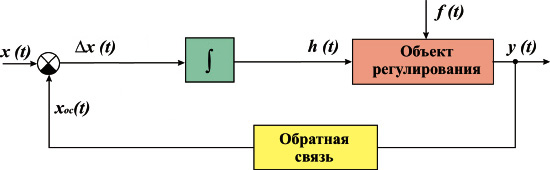
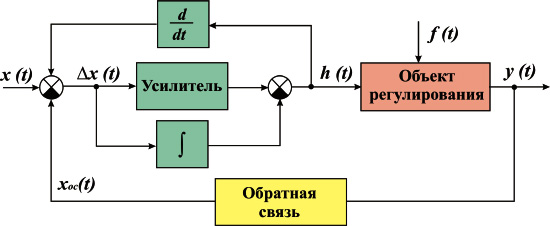
تعمل معظم أنظمة التحكم الآلي المعروفة على مبدأ الانحراف. هذا يعني أنه يدخل حيز التنفيذ بعد أن ينحرف المتغير الخاضع للرقابة عن القيمة المحددة ، كما يقولون ، في وجود عدم تطابق Dx (t) بين المجموعة x (t) والقيمة الفعلية y (t) للمتحكم فيه عامل.
بالنسبة لأنظمة التحكم الآلي الأكثر شيوعًا ، يتم استخدام الأسماء أحيانًا التي تعكس ميزاتها المرتبطة بطريقة التشكيل في النظام التلقائي لإجراءات التحكم التي يتم إرسالها إلى المشغل.
دع Dx (t) يمثل انحراف المتغير الخاضع للرقابة y (t) عن القيمة المحددة x (t) ، ah (t) تأثير النظام التلقائي على الكائن المنظم. قد تختلف قيمة Dx (t) تبعًا للوقت بطرق مختلفة.
هناك قوانين تنظيمية خطية وغير خطية.
يمكن تقسيم جميع قوانين التحكم الآلي إلى:
1. أبسط:
- متناسب؛
- متكامل؛
- التفاضليه؛
2. الصناعية:
- تكاملي نسبي ؛
- تفاضل نسبي ؛
- تفاضل نسبي متكامل.
تم تطوير العديد من الأساليب التطبيقية للبحث والتحليل والتركيب ، والأساليب الحسابية والتجريبية المختلفة لتحديد ثبات ودقة وجودة العمل ، بالإضافة إلى مخططات تفصيلية لقوانين التحكم الآلي الخطي. الأجهزة التقنيةتشكيلها وتنفيذها.
قانون نسبي. في أغلب الأحيان ، مثل هذا الاعتماد الوظيفي هو اعتماد نسبي بسيط ، حيث يجب أن تتكاثر القيمة الخاضعة للرقابة y (t) عادة بأكثر من مستوى عالقوة تغيير القيمة المعطاة x (t) أو عدم تطابق Dx (t).
|
إذا افترضنا أن h (t) يتغير بشكل متناسب مع Dx (t) ، فإن وحدة التحكم هذه تسمى متناسبة أو P-controller. التعبير عن العلاقة التناسبية بين القيم h (t) و Dx (t) له الشكل التالي h (t) = k Dx (t) ، حيث k هو كسب وحدة التحكم.
يمكن أن تكون وحدة التحكم التلقائية المتناسبة عبارة عن رابط تضخيم تقليدي مع ربح متغير ، يتم تضمينه في التعليقات السلبية فيما يتعلق بموضوع التنظيم.
دعونا نرى ما يحدث الهيئة التنفيذيةعندما يقفز المتغير المحكوم y (t) إلى Dy ويأخذ القيمة y + Dy . في أبسط وحدة تحكم تعمل على مبدأ الانحراف ، في عملية التنظيم ، تكون القيمة h (t) أكبر ، وكلما زاد الانحراف Dx (t).
مبدأ تشغيل جهاز التحكم النسبي
كيف يمكننا أن نستنتج من الصيغة أعلاه أن التشغيل العادي لجهاز التحكم هذا ممكن فقط عندما يكون Dx (t)> 0. وبالتالي ، فإن النظام التلقائي به خطأ ثابت (ثابت) ، وهو ما يسمى regulator droop ، ونظام التحكم الآلي يسمى النظام الثابت.
يتم التعبير عن الدولة كنسبة مئوية ويتم تحديدها بواسطة الصيغة:
|
في نظام آلي ثابت فيما يتعلق بإجراء التحكم ، عندما يميل الإجراء إلى قيمة معينة بمرور الوقت ، يميل الخطأ أيضًا إلى قيمة ثابتة ، اعتمادًا على قيمة إجراء التحكم ، أي لا يمكن للنظام التلقائي الثابت التأكد من ثبات المتغير المتحكم به مع متغير في وقت الحمل.
عند الحديث عن خطأ تحكم ثابت ، يُعتقد أنه بعد كل تغيير في اضطراب خارجي أو انحراف عن وضع تشغيل معين ، والذي يحدث بسبب أسباب أخرى ، يتم تعيين قيمة ثابتة للمتغير المتحكم فيه مرة أخرى ، إن لم يكن كما كان من قبل ، لكنها ثابتة ، وتبقى كما هي دون تغيير.
النظام الأوتوماتيكي الساكن لديه ترتيب صفري من الاستاتية. هذا يعني أنه لا توجد روابط متكاملة في سلسلة التحكم الآلي المباشر. يمكن أن يحتوي على روابط ثابتة فقط: تضخيم أو إجبار أو متذبذب.
لتحسين دقة الحفاظ على القيمة المحددة للمتغير المتحكم فيه ، على النحو التالي من المعادلة أعلاه ، قم بزيادة الكسب k. ومع ذلك ، في هذه الحالة ، قد يزداد الخطأ الديناميكي ، لأنه حتى التغيير البسيط في المتغير الخاضع للرقابة يؤدي إلى تغيير كبير في إجراء التحكم h (t) ، مما قد يؤثر سلبًا على خصائص العمليات العابرة ، مما يتسبب في تقلبات إضافية في متغير متحكم فيه.
|
قانون متكامل. من أجل القضاء على العيب المشار إليه في أنظمة التحكم الآلي للعمل المباشر ، تم إنشاء أنظمة تلقائية للعمل غير المباشر ، حيث يتم تضمين رابط إضافي بين العنصر الحساس والهيئة التنفيذية (في معظم الحالات ، تقوم بعملية دمج خطأ التحكم Dx (t) ، يعمل بمصدر طاقة مستقل). يمكن أن يكون محرك هيدروليكي أو هوائي ، محرك DC أو التيار المتناوبالخ. في الهيئات التنظيمية المتكاملة (I-regulators) ، يتم تشكيل إجراء التحكم وفقًا للقانون التالي
يمكن أن يكون المنظم المتكامل رابطًا متكاملاً مع متغير نسبة والعتادفي ردود الفعل.
مبدأ تشغيل المنظم لا يتجزأ
تتميز العملية العابرة في نظام أوتوماتيكي به وحدة تحكم I بغياب خطأ تحكم ثابت و أعلى قيمةانحرافات القيمة المنظمة عن القيمة المحددة مقارنة بقوانين التنظيم الأخرى. لا يتم استخدام المنظمين I في ممارسة التحكم الآلي ، نظرًا لأن لديهم صفات ديناميكية ضعيفة وفي معظم الحالات تساهم في حدوث تذبذبات غير مخمد في النظام التلقائي.
|
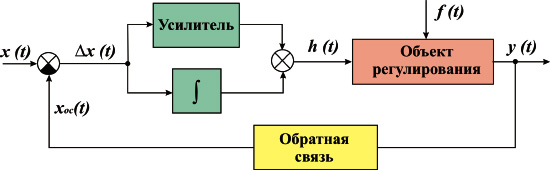
القانون النسبي المتكامل. لقد أدرك المهندسون والعلماء منذ فترة طويلة أن النظام الأوتوماتيكي الساكن لا يمكن أن يكون دقيقًا تمامًا ، إذا كنا نعني تقليل الخطأ الساكن إلى الصفر ، وأن المنظمات المتكاملة تساهم في ظهور أنماط التذبذب. ثم بدأ البحث عن طرق لتحسين تشغيل الأنظمة الأوتوماتيكية. لوحظ أن عناصر القصور الذاتي لها تأثير سلبي على الخصائص الديناميكية للنظام الأوتوماتيكي ، خاصة في المنظمات ذات المفعول المباشر.
في عملية تنظيم نظام أوتوماتيكي متناسب متكامل (وحدات تحكم PI) ، يتم تنفيذ إجراءين: الأول ، سمة من سمات منظم P ، لذلك يمكننا التحدث عن المكون P لعملية التنظيم ، و ثانيًا ، والذي يدمج حجم المكون المتكامل Dx (t) غير المتطابق.
في وحدات تحكم PI ، يتم تشكيل الإجراء التنظيمي وفقًا للقانون التالي.
قانون التنظيم النسبي لا يتجزأ هو اتصال موازيةمكونات متناسبة ومتكاملة.
تجمع وحدة التحكم التناسبية المتكاملة بين مزايا القوانين التناسبية والتكاملية للتحكم الآلي ، وهي: يضمن المكون النسبي سرعة كافية لوحدة التحكم ، ويقضي المكون المتكامل على خطأ التحكم الثابت.
في بداية عملية التحكم الآلي ، يتم لعب الدور الرئيسي بواسطة المكون النسبي ، لأن المكون المتكامل لا يعتمد فقط على القيمة المطلقة لعدم التطابق بين نقطة الضبط والقيمة الفعلية للمتغير المتحكم فيه ، ولكن أيضًا على الوقت. مع زيادة الوقت ، يزداد دور المكون المتكامل ، الذي يضمن القضاء على الخطأ الثابت.
عن طريق اختيار المعاملين k1 و k2 ، يمكن للمرء أن يتغير جاذبية معينةكل مكون.
عند استخدام مثل هذا النظام التلقائي ، يتم التخلص من خطأ التحكم الثابت تمامًا. النظام الأوتوماتيكي ثابت ، حيث Dx (t) = 0.
يمكن أن تكون الأنظمة الأستاتيكية من الرتبة الأولى والثانية والأعلى من الاستاتيكية.
لا يحتوي النظام الاستاتيكي من الدرجة الأولى على خطأ في الموضع ، ولكنه يحتوي على خطأ سرعة ثابت وخطأ تسارع متزايد.
لا يحتوي النظام الاستاتيكي من الدرجة الثانية على أخطاء في الموضع والسرعة ، ولكن به خطأ ثابت في التسارع.
سيكون النظام التلقائي ثابتًا فيما يتعلق بالإجراء الذي يتم التحكم فيه إذا كان الخطأ يميل إلى الصفر ، بغض النظر عن قيمة الإجراء الخارجي ، مع إجراء خارجي يميل إلى قيمة ثابتة. عادةً ما تحتوي الأنظمة الثابتة على حل تصميم أقل تعقيدًا من الأنظمة الثابتة. لديهم خطأ في الحفاظ على ثبات قيمة المتغير المتحكم به تحت الأحمال الخارجية المختلفة. التغيير في المتغير المتحكم فيه ، والذي يتسبب في قيام النظام الثابت بنقل العنصر المتحكم فيه من موضع محدد إلى آخر ، هو أهم ما يميزهنظام ثابت ويسمى عدم انتظامه. وتسمى نسبة عدم الانتظام هذا إلى القيمة الاسمية للمتغير الخاضع للرقابة درجة عدم الانتظام (معامل التدلي أو التدلي).
إذا أخذنا في الاعتبار عدم وجود خطأ تحكم ثابت ، فإن مثل هذا النظام التلقائي يكون دقيقًا تمامًا. ولكن ، كما أظهرت التجربة ، مع مثل هذا المخطط لبناء نظام آلي ، من الصعب الحصول على صفات تحكم ديناميكي مُرضية. هذا يرجع إلى حقيقة أن عدم التطابق Dx (t) يجب أن يقترب من موضع حالة التوازن الجديدة بمعدل صفر. خلاف ذلك ، تحدث التذبذبات غير المخمد للقيمة الخاضعة للرقابة في النظام التلقائي. بشكل عام ، فإن إمكانيات استخدام مثل هذه الأنظمة الأوتوماتيكية محدودة للغاية.
يوجد في أي منظم تلقائي ردود فعل داخلية ، والتي بسببها يتم إرجاع التخزين المؤقت قسرًا إلى موضع التداخل ، أي إلى حالة التوازن. توفر وحدة التحكم هذه خصائص ديناميكية جيدة ، ولكن عند استخدامها ، يحدث خطأ تحكم ثابت.
يحتوي النظام الاستاتيكي من الدرجة الأولى على وحدة تكامل واحدة في دائرة التحكم المباشر. بعد الانتهاء من العملية العابرة ، يتم ضمان دقة التنظيم نظرًا لخصائص المُدمج كجهاز تخزين (ذاكرة المُدمج المثالي لا نهائية).
يتيح إدخال ارتباطين متكاملين في النظام التلقائي الحصول على التحكم في التسارع. نظام ذو نظام استاتية من الدرجة الثانية ، بفضل خاصية المُدمجين ، يعيد إنتاج التأثيرات الثابتة والمتزايدة بشكل خطي بدقة في عملية ثابتة. تأثير يتغير مع التسارع المستمر ، يقوم النظام التلقائي بإعادة إنتاج (نسخ) بخطأ ديناميكي ثابت يسمى خطأ التسريع.
وبالتالي ، يمكن بسهولة تحديد ترتيب الاستاتية فيما يتعلق بعمل القيادة مباشرة من رسم بياني وظيفينظام آلي. للقيام بذلك ، يجب إحضار النظام التلقائي إلى نظام أحادي الحلقة عن طريق التحولات الهيكلية ويجب تحديد عدد الروابط المدمجة بين المدخلات والمخرجات.
|
قانون التفاضل النسبي المتكامل. الصفات الإيجابيةيتم توحيد جميع الأنظمة الأوتوماتيكية المعتبرة بواسطة قانون التحكم النسبي-المتكامل-التفاضلي أو وحدات التحكم PID. عملت فكرة المهندسين على كيفية القضاء على أوجه القصور المذكورة أعلاه ، أو إذا كان لا يمكن القضاء عليها تمامًا ، فعليك على الأقل تقليل تأثيرها الضار على العملية التنظيمية. تقرر استخدام التأثيرات على مشتق إشارة عدم التطابق.
تجمع وحدة التحكم PID بين مزايا جميع أبسط قوانين التحكم الآلي:
- أداء عالٍ بسبب وجود مكون نسبي ؛
- دقة عالية بسبب المكون المتكامل ؛
- وقت عابر قصير بسبب المكون التفاضلي.
يقال أحيانًا أن مثل هذه الهيئات التنظيمية تعمل بشكل متقدم ، أي أنها تدخل حيز التنفيذ عندما لا يكون الانحراف قد حدث بعد.
بفضل التأثير على المشتق ، يتم تشكيل إجراء التحكم مسبقًا ، وبفضل الإشارة الموجودة على التكامل ، تتم إزالة خطأ التحكم الثابت.
في هذه الحالة ، يتم تشكيل إجراء التحكم وفقًا للقانون

في أوضاع التشغيل ذات الحالة المستقرة ، بغض النظر عن كيفية تغير الاضطرابات ، تظل القيمة المضبوطة دائمًا دون تغيير. تعمل وحدة التحكم هذه في بداية الفترة العابرة الناتجة عن تغيير الحمل كوحدة تحكم PI ، وهي مواتية للخصائص الديناميكية للنظام ، ثم أثناء الانتقال ، يتم إضعاف إجراء التغذية المرتدة ، مما يسمح بالتشغيل بدون خطأ ثابت. هذا النوع من التغذية الراجعة يسمى التغذية الراجعة المرنة.
مبدأ تشغيل وحدة التحكم الاشتقاقية المتناسبة
وتجدر الإشارة إلى أن استخدام وحدات التحكم الأوتوماتيكية ذات المكونات التفاضلية ، على الرغم من مزاياها ، لا ينصح به دائمًا ، وأحيانًا يكون غير مقبول. لذلك ، بالنسبة للكائنات ذات التأخير الكبير عبر قناة التحكم ، لا فائدة من إدخال إجراء على مشتق القيمة الخاضعة للرقابة ، حيث ستدخل هذه الإشارة إلى وحدة التحكم التلقائية بعد وقت التأخير بعد وصول الاضطراب ، والذي يكون كبيرًا بالنسبة له يمكن أن تتراكم الانحرافات في كائن التحكم. في مثل هذه الحالات ، يمكن أن يؤدي جهاز التحكم PID إلى عدم استقرار النظام التلقائي.
إن استخدام القوانين غير الخطية للتحكم الآلي ، التي تحددها معادلات الحالة غير الخطية المختلفة ، يوسع إلى حد كبير احتمالات التغيير السريع لجودة عمليات التحكم الآلي ودقة الأنظمة الأوتوماتيكية. يجب أن يكون هذا واضحًا من الاعتبارات الأساسية العامة ، لأن مجال المعادلات غير الخطية أكثر ثراءً وتنوعًا من المعادلات الخطية.
على أية حال النظرية العامةلا توجد قوانين رقابة تلقائية غير خطية ؛ يتحدث البحث والخبرة في تطبيق أنواع معينة من هذه القوانين عن فعاليتها العملية الكبيرة.
يتمثل أحد الاختلافات المهمة بين قوانين التحكم التلقائي غير الخطي والقوانين الخطية في أنها تنقل خصائص جديدة بشكل أساسي إلى النظام التلقائي. إذا تم دائمًا ، باستخدام قانون خطي للتحكم الآلي ، إنشاء إشارة تتناسب مع متغير الإدخال أو مشتقه ، فعندئذٍ مع قانون غير خطي ، يمكن لطبيعة عمل النظام التلقائي على موضوع التنظيم يتغير بشكل كبير ، اعتمادًا على حجم إجراء الإدخال. بمعنى آخر ، إذا كان التغيير في حجم الانحراف Dx (t) بالنسبة للأنظمة الأوتوماتيكية الخطية هو تغيير فقط في المقياس ، ولكن ليس في شكل عمليات ، فعندئذٍ في النظام التلقائي غير الخطي ، يمكن لشكل العمليات يتغير أيضًا بشكل كبير ، وصولاً إلى تغييرات نوعية أساسية في نمط العمليات الجارية. يمكن استخدام هذه الخصائص الخاصة للقوانين غير الخطية بشكل مفيد في هندسة التحكم.
القوانين غير الخطيةينقسم التحكم الآلي إلى:
- القوانين الوظيفية غير الخطية للتحكم الآلي ؛
- القوانين المنطقية غير الخطية للتحكم الآلي ؛
- تحسين القوانين غير الخطية للتحكم الآلي ؛
- القوانين البارامترية غير الخطية للتحكم الآلي.
دعونا نفكر بشكل منفصل في كل من القوانين غير الخطية المحددة للتحكم الآلي.
القوانين الوظيفية غير الخطيةيتضمن التحكم الآلي تغييرًا في إجراء التحكم h (t) على موضوع التنظيم ، والذي يتم التعبير عنه كدالة غير خطية لانحراف المتغير المتحكم فيه Dx (t). يمكن أن تحتوي هذه الفئة من الأنظمة الأوتوماتيكية على لاخطية ثابتة وديناميكية.
قد يتضمن قانون التحكم الآلي غير الخطي عوامل غير خطية من قيمة الإخراج y (t). هذه الشروط الديناميكية للقانون غير الخطي للتحكم الآلي لها تأثير مختلف على خصائص التخميد للنظام الآلي في أوضاع عابرة ، اعتمادًا على معدل الانحراف عن المتغير Dx (t) المتحكم فيه. يمكنهم تحسين الدقة الديناميكية للنظام التلقائي بشكل كبير في أوضاع مختلفة من الحركة القسرية والتشغيل أشكال مختلفةإشارات الإدخال المحددة. فضلا عن التأثيرات العشوائية.
نلاحظ أيضًا أن القوانين الوظيفية غير الخطية للتحكم الآلي يمكن أن ترتبط ليس فقط بتغيير المعلمات اعتمادًا على حجم إجراءات الإدخال ، ولكن أيضًا مع تغيير في بنية النظام التلقائي.
|
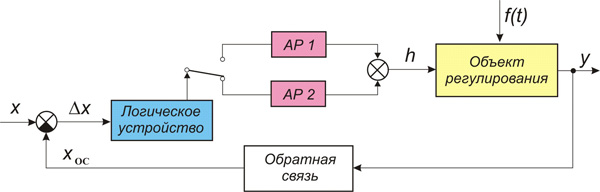
قوانين المنطق غير الخطيةيتم تنفيذ التحكم الآلي بمساعدة أجهزة منطقية غير وظيفية ولكنها أكثر تعقيدًا. يمكن اختزال إنشاء أبسط قانون منطقي غير خطي للتحكم الآلي في اختيار طريقة أو طريقة أخرى لمعالجة إشارة عدم التطابق Dx (t) اعتمادًا على المهام المحددة للنظام التلقائي وجودة التحكم المطلوبة.
يمكن أيضًا ربط القوانين المنطقية غير الخطية للتحكم الآلي بتغيير في بنية النظام الآلي. على سبيل المثال ، باستخدام جهاز منطقي ، يمكنك تشغيل وإيقاف إشارات التحكم على المشتقات الأولى والثانية أو التكامل ، اعتمادًا على مجموعة قيم الانحراف لإشارة الخطأ Dx (t).
بشكل عام ، يمكن أن يحدث تشغيل جهاز التبديل في نظام آلي بهيكل متغير من عدة قيم إدخال. في هذه الحالة ، بالإضافة إلى عدم الخطية الرئيسي الناشئ عن تبديل الهيكل ، قد يكون هناك بالإضافة إلى ذلك أي خصائص غير خطية في أجزاء أخرى منفصلة من وحدة التحكم التلقائية أو كائن التحكم.
تحسين القوانين غير الخطيةيعتمد التحكم الأوتوماتيكي على استخدام طرق التغيير الكلاسيكية أو الحد الأقصى للمبدأ القائم عليها ، أو طرق البرمجة الديناميكية بحيث يكون للنظام التلقائي سرعة قصوى أو حد أدنى من الخطأ ، أو حد أقصى لقيمة أخرى ، مع مراعاة القيود المفروضة في نظام آلي حقيقي على الإحداثيات الفردية.
كقاعدة عامة ، في هذه الحالة ، يتم الحصول على القوانين غير الخطية للتحكم الآلي ، على الرغم من أنه من الممكن تحسين معاملات القانون الخطي. في كثير من الأحيان ، يتمثل القانون الأمثل للتحكم الآلي في تبديل إجراء التحكم h (t) من قيمة قصوى إلى أخرى. يتم تحديد أوقات التبديل من خلال مجموعات معقدة من قيم المتغيرات المتعددة ومشتقاتها.
القوانين البارامترية غير الخطيةيشكل التحكم الآلي إجراء التحكم في شكل وظيفة غير خطية للإحداثيات الحالية ، حيث يتم تحديد برنامج حدودي.
تستخدم على نطاق واسع في أنظمة تثبيت الضغط ودرجة الحرارة والمستوى وما إلى ذلك. يقوم منظمو العمل المباشر ، كقاعدة عامة ، بتنفيذ قانون التنظيم.
ضع في اعتبارك نظام التحكم في الضغط بمنظم يعمل مباشرة (الشكل). يتأثر الغشاء 1 بقيمة قابلة للتعديل (الضغط p للوسيط المقاس) وقوة المواجهة الناتجة عن الزنبرك 2 من نقطة الضبط. عندما يظهر اختلاف بين الضغوط التي تم قياسها وضبطها ، فإن هذا الاختلاف يعمل على الغشاء في اتجاه تقليل هذا الانحراف ، حيث يتحرك الصمام 5 مع الجذع 4. يتم تغيير القيمة المحددة عن طريق تغيير توتر الزنبرك باستخدام الصمولة 3. الكسب (الإعداد ) للمنظم يعتمد على خصائص تدفق الصمام.
في أجهزة التحكم في درجة الحرارة ذات المفعول المباشر (صمام التمدد الحراري) ، كقاعدة عامة ، يتم استخدام المصباح كمستشعر. عندما تتغير درجة الحرارة المتوسطة ، يتغير الضغط في المصباح ، ونتيجة لذلك تنضغط أو تضغط منفاخ النظام الحراري ، وتحرك صمام التحكم بشكل مشابه للغشاء.
تنظيم التشغيل / الإيقاف.
للحفاظ على القيمة الخاضعة للرقابة في نظام بسيط ، عندما لا تكون الدقة العالية مطلوبة ، يمكن استخدام وحدة تحكم غير خطية من النوع "on-off".
دعونا نفكر في عمل المنظم على الخروج لشركة OWEN. يظهر مخطط كتلة معمم لمنظمات OVEN في الشكل. تستخدم المدخلات لتوصيل أنواع مختلفة من أجهزة الاستشعار.
أرز. مخطط كتلة معمم لمنظمي شركة "OWEN"
تقوم وحدة معالجة الإشارة بتصحيح قراءات أجهزة الاستشعار ، والتصفية الرقمية: تقضي على تداخل الإشارة الفردية ، وتسهل قراءات الجهاز عن طريق حساب متوسطها (لعدد معين من القياسات). يقارن الجهاز المنطقي القيمة المقاسة مع القيمة المحددة ويولد إجراء تحكم.
في التحكم في التشغيل والإيقاف ، يتم عكس إشارة الخرج إذا تجاوزت القيمة المقاسة القيمة المحددة. تتطلب هذه العملية جهاز إخراج من النوع الرئيسي: مرحل إلكتروني ، جهاز optocoupler ترانزستور ، جهاز optocoupler ثلاثي ، مخرج للتحكم في مرحل الحالة الصلبة الخارجية (أشباه الموصلات). 
مخطط التين (أ) والرسوم البيانية (ب)
على التين. يتم تقديم مخطط (أ) للتحكم في درجة الحرارة أثناء التشغيل في كائن بواسطة وحدة التحكم هذه والرسوم البيانية (ب) للتغيرات في درجة الحرارة وحالة المرحل (هي منطقة العودة لوحدة التحكم). يمثل الرسم البياني لعملية التحكم التذبذبات غير المخمد.
على اللوحة الأمامية للمنظم:
· العرض الرقمي للإشارة إلى قيم درجة الحرارة المنظمة ؛
زر للدخول إلى وضع البرمجة ؛
أزرار لزيادة أو تقليل القيمة المحددة (نقطة الضبط) ؛
مصابيح LED للإشارة إلى حالة الجهاز.
PID - التنظيم
في الحالة العامة ، تحدث الصيانة التلقائية لنقطة الضبط (نقطة الضبط) للقيمة المنظمة وفقًا للمخطط الموضح في الشكل. 
مخطط التين لنظام التحكم المغلق.
حاليًا ، الغالبية العظمى من وحدات التحكم التلقائية رقمية. يتم حساب إشارة الخرج فيها بالصيغة:
Y i 1 / X p [E i + 1 / t n * ΣE i * Δ t Meas + t g * Δ E i / Δ t Meas] * 100٪ ، حيث
حيث: X p - النطاق النسبي الذي يسري القانون P ضمنه ؛
ه ط - عدم تطابق ؛
T g - ثابت وقت التمايز ؛
Δ E i - الفرق بين قياسين متجاورين E i و E i -1 ؛
Δ t Meas - الوقت بين قياسين متجاورين T i و T i -1 ؛
t n - ثابت وقت التكامل ؛
ΣE i - تراكمت في أنا عشر لحظةالوقت ، مجموع حالات عدم التطابق (مجموع متكامل) ؛
يمكن أن تكون أجهزة الإخراج لوحدة التحكم PID:
نوع المفتاح (انظر وصف المنظم ثنائي الموضع) ؛
· النوع التناظري - محول من رقمي إلى تماثلي يولد إشارة تناظرية ، تسمى حلقة التيار 4-20 مللي أمبير (تتناسب مع إشارة الخرج pe Y i).
إذا كان جهاز الإخراج من نوع مفتاح ، يتم تحويل إشارة الخرج إلى سلسلة من نبضات التحكم بمدة D (انظر الشكل.)
D = Y * T sl / 100٪
حيث: D - مدة النبض ، s ؛
T sl - فترة تكرار النبض ، s ؛
ص- إشارة خرج وحدة التحكم ؛
التين. الحركة على طول (ج) بواسطة منظم مع خرج نبضة مع مشغل سرعة ثابتةلحركات الاندفاع المختلفة (أ ، ب)
كما يتضح من الشكل ، مع انتقال واحد Tsl ، يتم تحديد مدة النبضة بواسطة قيمة إشارة الخرج Y. يتم إرسال هذه النبضات D إلى جهاز تنفيذيمنظم. يسمى هذا التحويل لإشارة الخرج للتحكم في Pulse Chic Modulation (PWM). يقوم جهاز الإخراج من نوع المفتاح بتشغيل مشغل السرعة الثابتة (IMPS) للوقت D ، s. الحركة الناتجة للهيئة التنظيمية للكائن بمساعدة MMSI الموضحة في الشكل.
يحتوي صمام التحكم على محرك كهربائي (محرك IM) وزوجان من جهات الاتصال للتحكم في اتجاه دورانه. 
منظم الشكل مع إيقاف الترحيل (أ) والرسوم البيانية للقيمة المنظمة مع حالة المرحل (ب).
على التين. ويظهر اتصال مرحلات خرج المنظم بالمحرك الكهربائي IMA. على التين. يُظهر b رسمًا بيانيًا للتغيير في القيمة الخاضعة للرقابة بالنسبة إلى مجموعة T والنبضات المقابلة D للتحكم في الصمام. في T< T уст подаются импульсы на открытие клапана, при Т>T الفم - للإغلاق. من التين. من الواضح ما المزيد T-Tضبط ، أطول مدة النبض (PWM).
كما يتضح من الشكل ، مع فترة واحدة Tsl ، يتم تحديد مدة النبضة بواسطة قيمة إشارة الخرج Y. يتم إرسال هذه النبضات D إلى مشغل وحدة التحكم. يسمى هذا التحويل لإشارة الخرج للتحكم بالتضمين الواسع للنبضة (PWM). يقوم جهاز الإخراج من نوع المفتاح بتشغيل مشغل السرعة الثابتة (MCAS) للوقت D ، s.
تظهر الحركة الناتجة للهيئة التنظيمية للكائن بمساعدة MMSI في الشكل.









")























