إرسال عملك الجيد في قاعدة المعرفة أمر بسيط. استخدم النموذج أدناه
سيكون الطلاب وطلاب الدراسات العليا والعلماء الشباب الذين يستخدمون قاعدة المعرفة في دراساتهم وعملهم ممتنين جدًا لك.
استضافت في http://www.allbest.ru
مقدمة
استنتاج
فهرس
مقدمة
منظم إشارة تلقائية
المرحلة الحالية من تطوير الأتمتة العمليات التكنولوجيةتتميز بتعقيد المهام التنظيم التلقائيوالتحكم ، زيادة كبيرة في عدد المعلمات القابلة للتعديل ، وتحسين التطوير وإنشاء عناصر وظيفية جديدة لأنظمة العمل المستمر والمنفصل ، بالإضافة إلى زيادة دقة التنظيم على أساس استخدام تكنولوجيا المعالجات الدقيقة وأجهزة الكمبيوتر الدقيقة . الهدف هو زيادة إنتاجية العمالة وتوفير المواد الخام و قوة العملفي صناعة المواد الغذائية يتطلب الأتمتة عمليات الانتاجوعلى وجه الخصوص الإنشاء والاستخدام أنظمة مؤتمتةالتحكم في العملية. تعتمد إمكانية ومستوى أتمتة إنتاج الغذاء على العديد من العوامل والمتطلبات الأساسية: طبيعة ودرجة استمرارية العملية التكنولوجية ، ومستوى الميكنة ، وخصائص نظام التحكم ، وتوافر نموذجها الرياضي وتشغيلها. الخوارزميات ، إلخ.
تشمل ميزات أتمتة إنتاج الغذاء ما يلي: مجموعات من العمليات المستمرة والدورية ، والتقلبات الكبيرة في خصائص المواد الخام ، والمعرفة غير الكافية ، في كثير من الحالات - عدم وجود وصف رياضي للعمليات التكنولوجية ومجموعة المعدات التكنولوجية ومعدات الأتمتة اللازمة. هناك ثلاثة جوانب لإنتاج الغذاء. يتعلق الجانب الأول بإدارة العمليات ، والتي تستند إلى التغييرات. الخصائص الفيزيائية والكيميائيةأو الأبعاد الهندسية للمادة الأولية. في هذه الحالة ، يتم تقليل مهمة التحكم إلى قياس ومراقبة وتنظيم المعلمات الفيزيائية والكيميائية التي تميز مسار العملية التكنولوجية. الجانب الثاني يتعلق بالإدارة. المعدات التكنولوجية، والتي ينبغي أن تضمن تدفق العمليات في الوضع الأمثل. الجانب الثالث يشمل قضايا أتمتة صيانة المعدات التكنولوجية.
يتم تحديد حجم أتمتة العمليات التكنولوجية من خلال ثلاثة عوامل: الضرورة والجدوى الاقتصادية والبيئة بيئة. العامل الأول هو أتمتة العمليات التكنولوجية التي لا يستطيع الشخص التحكم فيها. لا تؤخذ أدوات الأتمتة ، التي يرجع استخدامها إلى الحاجة ، في الاعتبار عند تقييم الكفاءة الاقتصادية ، عند تحديد المقدار المنطقي للأتمتة. العامل الثاني - الكفاءة الاقتصادية - يمكن حسابه ويسمح لك بالتقييم الكفاءة الاقتصاديةإدخال أدوات الأتمتة ، مع مراعاة القضايا الاجتماعية لتحسين ظروف عمل موظفي الخدمة. وتجدر الإشارة إلى أن أتمتة العمليات تساهم دائمًا تقريبًا في إيجاد حل إيجابي للقضايا البيئية ، منذ كل شيء العمليات الآليةفي الإعداد الصحيحوسائل الأتمتة تستمر في الأوضاع المثلى.
المنظم هو جهاز يتحكم في قيمة المعلمة الخاضعة للرقابة. يتم استخدام المنظمين في أنظمة التحكم الآلي. إنهم يراقبون انحراف المعلمة الخاضعة للرقابة عن القيمة المحددة ويولدون إشارات تحكم لتقليل هذا الانحراف.
الأكثر شهرة في السوق الروسيالشركات المصنعة:
منظمات إنتاج MZTA
المنظمات والعدادات المصنعة من قبل OWEN
1. تصنيف المنظمين. أنواعها وفوائدها
يتم استخدام عدد من المعلمات لتصنيف المنظمين. دعونا نفكر فيها بالتفصيل.
في أنظمة التحكم الآلي ، الأكثر شيوعًا هي وحدة التحكم P ، وحدة التحكم PI ، وحدة التحكم PID ، وحدة التحكم في الموضع. غالبًا ما يتم تحديد وحدات التحكم PWM بشكل منفصل ، ولكن هذه وحدة تحكم SDA ، يتم تحويل ناتجها إلى إشارة واحدة أو اثنتين من الإشارات المنفصلة باستخدام تعديل عرض النبضة. بالإضافة إلى ذلك ، يوجد الآن المزيد والمزيد من وحدات التحكم التي تطبق قوانين التحكم على أساس وحدة تحكم ضبابية منطقية.
كائن التحكم (OC) أو كائن التحكم هو جهاز يجب دعم وضع التشغيل المطلوب من الخارج من خلال إجراءات تحكم منظمة بشكل خاص.
التحكم - تشكيل إجراءات التحكم وفقًا لقانون معين ، مما يوفر وضع التشغيل المطلوب لنظام التشغيل.
التحكم الآلي - يتم التحكم دون مشاركة مباشرة من قبل شخص.
تتمثل مهمة التنظيم في إحضار قيمة مخرجات الكائن المنظم إلى قيمة محددة مسبقًا والحفاظ عليها قيمة معينةمع مراعاة تأثير المؤثرات المزعجة.
نظام التحكم الأوتوماتيكي (SAR) هو نظام آلي بدائرة تأثير مغلقة (انظر الشكل. الرسم التخطيطي الهيكلي لأبسط نظام تحكم) ، حيث يتم إنشاء التحكم Y من خلال مقارنة القيمة الحقيقية (PV = X) مع المجموعة قيمة ليرة سورية. الغرض الرئيسي من ACS هو الحفاظ على معين قيمة ثابتةمعلمة منظمة أو تغييرها وفقًا لقانون معين.
إجراء الإخراج (Y) - الإجراء المعطى عند إخراج نظام التحكم أو جهاز التحكم. في الأدبيات المتعلقة بالأتمتة ، توجد أيضًا اختصارات تتوافق مع هذا التعريف:
تحديد التأثير - التأثير على النظام ، الذي يحدد القانون المطلوب لتغيير المتغير الخاضع للرقابة.
عمل مزعج - إجراء يميل إلى تعطيل العلاقة الوظيفية بين إجراء الإعداد والمتغير المتحكم فيه.
التعليقات هي عملية تؤدي إلى حقيقة أن نتيجة عمل النظام تؤثر على المعلمات التي يعتمد عليها أداء هذا النظام. بمعنى آخر ، يتم إعطاء مدخلات النظام إشارة تتناسب مع إشارة الخرج الخاصة به (أو ، في الحالة العامة، وهي وظيفة لهذه الإشارة). غالبًا ما يتم ذلك عن قصد للتأثير على ديناميكيات النظام.
ميّز بين التغذية الراجعة الإيجابية والسلبية. تعمل التغذية الراجعة السلبية على تغيير إشارة الإدخال بطريقة تتعارض مع التغيير في إشارة الخرج. هذا يجعل النظام أكثر مقاومة لتغييرات المعلمات العشوائية. من ناحية أخرى ، تعمل التعليقات الإيجابية على تضخيم التغيير في إشارة الخرج. تميل الأنظمة ذات التغذية المرتدة الإيجابية القوية إلى أن تصبح غير مستقرة ؛ يمكن أن تحدث التذبذبات غير المخمد فيها ، أي يصبح النظام مولدًا.
المنظم - في نظرية التحكم ، جهاز يراقب تشغيل كائن التحكم كنظام ويولد إشارات تحكم له. يراقب المنظمون التغييرات في بعض معلمات كائن التحكم (مباشرة أو بمساعدة المراقبين) ويتفاعلون مع تغييراتهم باستخدام بعض خوارزميات التحكم وفقًا لجودة التحكم المحددة.
2. نوع إشارة التحكم في الخرج لوحدة التحكم PID في أنظمة التحكم الآلي
يمكن أن يكون لمحركات أنظمة التحكم الآلي أنواع مختلفة من إشارات الإدخال. لذلك ، يتم التحكم في بعضها بواسطة إشارة موحدة ، ويستخدم البعض إدخالًا منفصلاً واحدًا للتنظيم (على سبيل المثال ، وحدة التحكم في درجة الحرارة في الفرن) ، ويستخدم البعض مدخلين منفصلين (على سبيل المثال ، يتحكم جهاز التحكم في ضغط البخار في الجهاز في الصمام: يتم استخدام إشارتين - واحدة للفتح والأخرى لإغلاق الصمام). وفقًا لذلك ، يمكن أن يكون للمنظمين إما إشارة خرج تناظرية للتحكم ، أو إشارة واحدة أو اثنتين منفصلتين لتنفيذ التحكم في PWM (وحدة تحكم PWM) ، أو خرج منفصل ينفذ التحكم في طاقة النبض الطوري. يشمل نطاق الأجهزة التي نقدمها لإنشاء أنظمة تحكم أوتوماتيكية وحدات تحكم مع كل من المخرجات التناظرية والمخرجات المنفصلة التي تنفذ تعديل عرض النبضة لإشارة التحكم.
وجود خرج مرحل
مخرجات منفصلة وإمكانية برمجتها
في حالة وجود إشارة تحكم تناظرية ، يمكن أن يكون للمنظم إشارة أو اثنتين منفصلتين لتنفيذ التنبيه أو الحماية أو وظائف أخرى. لذلك ، على سبيل المثال ، يمكن لوحدة التحكم في درجة الحرارة PID إصدار إنذارات عندما تتجاوز المعلمة التي يتم التحكم فيها الحدود المحددة.
وجود مولد برنامج (منظم ضغط ، منظم درجة حرارة)
غالبًا في أنظمة التحكم الآلي في العمليات الدورية ، يلزم تغيير قيمة مرجع وحدة التحكم وفقًا لبرنامج معين. لهذا ، يتم استخدام وحدة تحكم برمجية. معلمات تقييم وحدات التحكم هذه هي عدد خطوات البرنامج ، والحد الأقصى والحد الأدنى لطول خطوة البرنامج ، وإمكانية تغيير المهمة بسلاسة في خطوة ما. على سبيل المثال ، يحتوي جهاز التحكم في درجة الحرارة PID وجهاز التحكم في الضغط PID في نظام التحكم التلقائي لمصنع نمو البلورات على برامج معقدة لتغيير مهامهما.
عدد إشارات الإدخال لنظام التحكم المتضمن في تكوين إشارة التحكم (جهاز التحكم في التدفق)
غالبًا ما يكون من الضروري تنظيم معلمة مع تصحيح إشارة التحكم بقيمة معلمة أخرى (على سبيل المثال ، وحدة تحكم تدفق الغاز مع تصحيح درجة الحرارة). مثال آخر سيكون تنفيذ التحكم التعاقبي.
نوع التحكم
هناك منظمات عالمية - يمكن تطبيق أي نوع من الإشارات على مدخلاتها. بمساعدتهم ، يمكنك إنشاء أنظمة تحكم لأي معلمات تكنولوجية. ومع ذلك ، غالبًا ما يكون نوع المعلمة التي يتم التحكم فيها محدودًا بشكل صارم: جهاز التحكم في الضغط ، جهاز التحكم في درجة الحرارة ، جهاز التحكم في المستوى ، جهاز التحكم في التدفق ، إلخ. هذا يرجع إلى حقيقة أنه من أجل القياس أنواع مختلفةيمكن استخدام خوارزميات مختلفة لمعالجة الإشارات. لذلك تفترض وحدة التحكم في درجة الحرارة ، عند تلقي إشارات من المزدوجات الحرارية ، تعويض درجة الحرارة للوصلات الباردة وتحويل قيمة EMF الحراري المتحكم به إلى قيمة درجة حرارة. في وحدة التحكم في التدفق ، غالبًا ما يكون من الضروري تحسين قيمة التدفق المقاس من ضغط ودرجة حرارة الوسط المتحكم فيه. لذلك ، من أجل تبسيط البرنامج المضمن في المنظم وتقليل تكلفة المنتج ، يقوم المصنعون بفصلهم وفقًا للغرض المقصود منه.
3. وصف عمل المنظمين
في كثير من الأحيان في أنظمة التحكم الآلي ، لا يجب التحكم في قيمة المعلمة التكنولوجية فحسب ، بل يجب أيضًا تسجيلها. للقيام بذلك ، تحتوي العديد من وحدات التحكم على إخراج تناظري إضافي. يتم توفير قيمة المعلمة الخاضعة للرقابة لها على مقياس معين. يمكن توصيل هذا الإخراج بإدخال جهاز التسجيل.
دقة التنظيم
وفقًا لهذه المعلمة ، يمكن تمييز المنظمات الصناعية العامة والدقيقة. مثال على ذلك هو PROTERM تحكم درجة الحرارة الدقيقة.
توافر واجهة اتصال مع معدات أخرى
عادة ما تكون أنظمة التحكم الحديثة جزءًا من أنظمة التحكم الكبيرة. من أجل دمج وحدات التحكم مع باقي المعدات أو لتوفير واجهة مستخدم مريحة في محطة المشغل ، يجب أن يكون لديهم واجهة اتصال. معظم منظمات بسيطةليس لديك اتصال. واجهات الاتصال الأكثر شيوعًا مع المستوى الأعلى هي RS-232 و RS-485. يقوم العديد من المصنّعين بتنفيذ بروتوكول التبادل الخاص بهم مع المنظمين ، ولكن الأكثر شيوعًا ، كما يمكن للمرء أن يقول معيارًا ، أصبح دعمًا لبروتوكول MODBUS RTU.
توافر وجودة خوارزميات الضبط التلقائي لمعلمات نظام التحكم
هذه وظيفة مهمة جدًا لإنشاء نظام تحكم تلقائي لكائن لا تُعرف خصائصه الديناميكية مسبقًا أو تتغير بشكل كبير بمرور الوقت.
عدد حلقات التحكم المخدومة
أكثر المنظمين شيوعًا لدائرة واحدة. ولكن يوجد الآن المزيد والمزيد من المنظمين متعددي الحلقات. غالبًا ما تجعل وحدات التحكم هذه من الممكن تنفيذ التحكم المترابط في المعلمات.
منظمات الطاقة
معلمة مهمة هي الحاجة إلى استخدام خارجي مزود الطاقةلمدة 24 فولت التيار المباشرووجود مصدر طاقة مدمج لدارات القياس.
استنتاج
المكون النسبي هو أساس إجراء التحكم لوحدة التحكم الهوائية المدروسة.
تحسين السمة الزمنية للعملية العابرة ، في نفس الوقت نقوم بتقليل استقرار نظام التحكم الآلي.
يجب استخدام أجهزة التحكم PID في ACS ذات القصور الذاتي العالي. من أمثلة هذه الأنظمة ما يلي:
خزان (حاوية) يلزم فيه ، من أجل تغيير ملحوظ في المستوى ، صب أو صب كمية كبيرة من السائل ؛
مبادل حراري يكون فيه التبادل الحراري الداخلي بطيئًا ويعمل مستشعر درجة الحرارة مع تأخير.
تستخدم وحدات التحكم الهوائية P- و PI- و PD- و PID بشكل أساسي في صناعة البتروكيماويات وفي الأماكن التي تتطلب متطلبات متزايدة من الانفجار والسلامة من الحرائق.
من أجل التشغيل الموثوق لمنظمات الهواء المضغوط ، من الضروري الحفاظ على معلمات هواء الخدمة ، وكذلك إجراء عمليات منتظمة اعمال صيانةوالذي يرتبط بتكاليف التشغيل الإضافية.
تم تبسيط تنفيذ المخططات المختلفة لوحدات التحكم إلى حد كبير مع ظهور وحدات التحكم PID القائمة على المعالجات الدقيقة.
كقاعدة عامة ، في وحدات التحكم هذه ، يتم تطبيق إشارة الخطأ في نفس الوقت على الفروع المتوازية التي تشكل مكونات متناسبة ومتكاملة وتفاضلية ، والتي يتم جمعها وتضخيمها بعد ذلك. أولئك. يمكن اعتبار كل فرع منظمًا منفصلاً. بفضل العمل المستقل ، يستبدل المكون المتكامل تمامًا المكون النسبي بنهاية العملية المؤقتة.
على الرغم من كل مجموعة متنوعة من وحدات التحكم PID المنتجة ، فإن مبدأ عملها يظل كما هو.
فهرس
1. Shchagin A.V. إلخ. أساسيات أتمتة العمليات. - م: تعليم عالى، 2009. - 163 ص.
2 - غولودينكو ب. محاكاةفي بيئة GPSS: دليل تصميم الدورة. - فورونيج: MICT ، 2007. - 112 ص.
3. أليكس ديميانينكو ، نظرية التحكم. وحدة تحكم PID ، - حقوق النشر © 2007 - 2009
4. Bityukov V.K. ، Volchkevich L.I. ، Golodenko B.A. أتمتة العمليات التكنولوجية للإنتاج الصناعي: الدورة التعليمية. - فورونيج: VGTA ، 2007. - 212 ص.
5. Bityukov V.K. ، Golodenko B.A. تكنولوجيا. المراحل والتنبؤات الرئيسية للتطوير: برنامج تعليمي. - فورونيج: VGTA ، 2006. - 264 ص.
6. لازاريف يو. نمذجة العمليات والأنظمة في MATLAB. - سانت بطرسبرغ: بيتر ، 2005.
استضافت على www.allbest.
...وثائق مماثلة
الدراسة مبادئ عامةبناء وحدات تحكم تكنولوجية تناسبية - متكاملة - تفاضلية. تصميم خوارزمية لوحدات التحكم في درجة الحرارة على أساس متحكمات MSP430 الرخيصة (Texas Instruments). شكل منفصل لوحدة التحكم.
أطروحة تمت إضافتها في 10/12/2015
وصف المراحل الرئيسية لحل المشكلات المتعلقة بتركيب وحدات التحكم. تطبيق قوانين P- و I- التنظيم في أنظمة أوتوماتيكيةأوه. جوهر نطاق القيم المسموح بها لوظيفة الانتقال. متطلبات أنظمة التحكم الآلي.
التحكم في العمل ، تمت إضافة 05/11/2012
توليف وتحليل النظام الأمثل أحادي الحلقة تحكم تلقائى. حسابات استخدام وحدات التحكم التي تطبق قانون تنظيم PI و PID في الأنظمة الرقمية. اختيار نوع وحدة التحكم الصناعية ، وتحديد معايير الإعداد الخاصة بها.
عمل بالطبع، تمت الإضافة في 02/11/2016
أنواع واستخدام أجهزة الاستشعار للتحكم الآلي في معلمات نظام العمليات التكنولوجية لإنتاج المواد الكيميائية. مبدأ تشغيل أجهزة الاستشعار المقاسة وأجهزة التحكم في درجة الحرارة والمفاتيح المعيارية. وسائل حماية التركيبات الكهربائية.
أطروحة تمت إضافة 2014/04/26
حساب استجابة التردد المعقدة للجسم في النطاق الترددي المطلوب. تحديد هامش الاستقرار لنظام التحكم الآلي المغلق. تقييم جودة المراقبة عند استخدام متحكمات PI و PID واختيار الأفضل.
ورقة مصطلح ، تمت إضافة 2014/12/04
وصف جهاز تنظيم الجهد. الغرض الرئيسي من الجهاز ونطاقه. النظر في ميزات المنظم على أساس الثايرستور والمضخمات المغناطيسية والترانزستورات. المعوض المتزامن: المفهوم والغرض ومبدأ التشغيل.
الملخص ، تمت الإضافة في 11/03/2015
تحديد الحساب أنواع مختلفةوحدات التحكم عن طريق الخصائص الموسعة. التخطيط العابرين. طرق التنفيذ ومبدأ التشغيل وحساب المعلمات الرئيسية لأنظمة التحكم الآلي المدمجة والرقمية.
ورقة مصطلح ، تمت إضافتها في 11/11/2013
خاصية التعجيل لهدف التنظيم وتحديد المعلمات التي تميز خصائص القصور الذاتي للكائن. حساب إعدادات المنظمين وفقًا لخاصية مرحلة السعة للكائن المنظم. حساب مؤشرات جودة ATS.
ورقة مصطلح ، تمت إضافة 10/22/2012
الرسم التخطيطي الوظيفي والكتل لقناة التحكم. توليف التيار والتحكم في السرعة. حساب ثابت وديناميكي للنظام والعابرين. جودة المنظم. مبدئي مخطط الرسم البيانيقناة تحكم المرساة.
ورقة مصطلح ، تمت الإضافة 09/28/2012
طريقة استجابة التردد الممتد. نظرة عامة على متطلبات مؤشرات الجودة. طرق الحاسب الآلي لتركيب أنظمة التحكم الآلي في بيئة ماتلاب. بناء خط التوهين المتساوي للنظام. تحديد إعدادات التحكم المثلى.
مثل أنظمة التحكم الآلي بشكل عام ، منظمات تلقائيةيمكن تصنيفها وفقًا لمعايير مختلفة.
اعتمادًا على طبيعة المتغير المتحكم فيه ، يتم تمييز منظمات الضغط وسرعة الدوران والجهد ودرجة الحرارة وما إلى ذلك.
اعتمادًا على مبدأ التحكم المستخدم ، يتم تقسيم جميع وحدات التحكم إلى وحدات تحكم الانحراف (الخطأ) ، وأجهزة التحكم في الاضطراب ، وأجهزة التحكم المدمجة (انظر الفقرتين 1.5 و 1.6).
بالنظر إلى وجود مصادر طاقة إضافية كأساس للتصنيف ، يمكننا التمييز بين المنظمين المباشرين وغير المباشرين (انظر الفقرة 1.7). في نفس الوقت ، اعتمادًا على نوع الطاقة المستخدمة ، تتميز المنظمات الكهربائية والهيدروليكية والهوائية والهوائية والكهروميكانيكية والكهربائية والهيدروليكية وغيرها من المنظمات.
تشمل مزايا المنظمين الكهربيين الترابط ، وانخفاض الوزن والأبعاد ، وإمكانية استخدام العناصر الكهربائية والراديوية القياسية في دوائر المنظم ، فرص واسعةلتضخيم الإشارة وتحويلها ، القدرة على التحكم في المسافات الطويلة عن طريق إرسال الإشارات عبر خطوط الاتصال السلكية واللاسلكية. العيب الرئيسي للمنظمات الكهربائية هو ضخامتها وتعقيدها. نوع كهربائيفي تلك الحالات عندما يكون مطلوبًا الحصول على عزم دوران كبير بسرعات دوران منخفضة وسرعة عالية. يتطلب تركيب وتشغيل وصيانة أجهزة التحكم الكهربائية وخاصة الإلكترونية موظفين مؤهلين تأهيلاً عالياً. تكلفة المنظمات الكهربائية ، كقاعدة عامة ، أعلى من تكلفة المنظمات الهوائية والهيدروليكية من نفس النوع ، خاصةً عندما يتم تصنيع معدات التحكم في نسخة مقاومة للانفجار.
تتمثل الميزة الأكثر أهمية للمنظمين الهيدروليكيين في الموثوقية العالية للتشغيل والخصائص الديناميكية الجيدة للمشغلات الهيدروليكية التي تطور قوى وعزم دوران كبيرة بسرعة عالية. في حالة استخدام الزيوت المعدنية كسوائل عمل ، فإن عيوب الأنظمة الهيدروليكية هي خطر الحريق ، وفي حالة استخدام الماء ، إمكانية التآكل السريع لعناصر المعدات من التآكل.
إن ميزة منظمات الهواء المضغوط مقارنة بالمنظمات الهيدروليكية هي السلامة من الانفجار والحريق ، فضلاً عن عدم وجود أنابيب تصريف ، مما يبسط النظام. تشمل عيوبها انضغاط الهواء ، مما يؤدي إلى حدوث أخطاء إضافية في تشغيل نظام التحكم.
مما قيل ، من الواضح أنه لا يمكن للمرء أن يعطي تفضيلًا عامًا لنوع أو نوع آخر من الطاقة المساعدة - يمكن أن يكون كل منها سيئًا أو جيدًا في ظروف معينة معينة. توجد أجهزة التحكم الكهربائية والهيدروليكية والهوائية في تكنولوجيا الأتمتة وتتطور بشكل متوازٍ. تتمتع الأنظمة المختلطة بأكبر قدر من المرونة ، حيث يكون جزء القياس عادةً كهربائيًا ، ويتم اختيار عنصر التشغيل هيدروليكيًا أو هوائيًا. مثال على ذلك هو نظام المتابعة الكهروهيدروليكي الموضح في الشكل. 1.32.
اعتمادًا على وجود ردود فعل إضافية ، يتم تمييز المنظمين بدون ردود فعل محلية (انظر الشكل 1.9 ، أ ؛ 1.10 ، أ ؛ 1.12) ومع استجابة(انظر الشكل 1.22 و 1.23).
اعتمادًا على عدد المتغيرات الخاضعة للرقابة ، يمكن تقسيم جميع وحدات التحكم إلى أحادية البعد ومتعددة الأبعاد (انظر الفقرة 1.11).
يمكن تمييز طبيعة التشكيل المستخدم في إرسال الإشارات من أحد عناصر المنظم إلى آخر كأساس للتصنيف والمنظمين المستمر والمرحل والنبضي والرقمي عن المجموعة الكاملة للمنظمين الحديثين (انظر الفقرة 12.1).
كما ترى ، يتم تصنيف المنظمين الآليين في نفس المجالات الرئيسية مثل أنظمة التحكم الآلي بشكل عام.
من وجهة نظر نظرية التحكم الآلي ، فإن الأكثر فائدة هو تصنيف المنظمين اعتمادًا على قانون التنظيم المطبق فيها. دعونا نفكر في هذه المشكلة بمزيد من التفصيل فيما يتعلق بوحدات تحكم العمل المستمر أحادية البعد التي تعمل عن طريق الانحراف. يتضح في الفقرة 1.6 أن المهام الرئيسية لمراقبي التحكم تشمل تحديد الخطأ (1.2) وتشكيل إجراء تنظيمي يضمن تحقيق المساواة (1.3) بدرجة معينة من الدقة (انظر الشكل 1.7) . في هذا الصدد ، إحدى الخصائص الرئيسية للمنظمين الذين يعملون على الانحراف ، من الطبيعي النظر في المعادلة التي تربط الإجراء التنظيمي بالخطأ x. في معظم أجهزة التحكم الحقيقية ، تكون العلاقة بين الكميات معقدة للغاية ويتم وصفها المعادلة التفاضليةترتيب عالي (غير خطي عادة). لأغراض تحليل مقارنوالتصنيفات ، عادة ما يتم تبسيط معادلات المنظم ، مع إهمال القصور الذاتي للعناصر التي تشكل المنظم التلقائي.
قانون التنظيم هو العلاقة بين قيم المدخلات والمخرجات لوحدة التحكم ، والتي يتم تجميعها دون مراعاة القصور الذاتي لعناصرها. لا ينطبق هذا المصطلح على أنظمة التحكم فحسب ، بل ينطبق أيضًا على أنظمة التتبع وأنظمة التوجيه وأنظمة التحكم وما إلى ذلك. في الحالات الأخيرة ، يُطلق على قانون التحكم اسم قانون التحكم.
في أبسط الحالات ، يعتمد إجراء التحكم فقط على الخطأ x:
إذا كانت الوظيفة (1.32) خطية ، إذن
![]()
أين مستمر؛ - معامل التناسب.
دلالة على أننا حصلنا على ذلك
يسمى قانون التنظيم الذي يتميز بالمعادلة (1.33) بقانون التنظيم النسبي. يطلق على المنظمين الذين يستخدمون قانون التحكم هذا اسم المنظمين النسبيين أو P-regulators. أمثلة على الأنظمة التي يستخدم فيها قانون التنظيم النسبي هي الأنظمة الموضحة في الشكل. 1.8 ، أ ؛ 1.9 ، أ ؛ 1.10 ، أ ؛ 1.13 و 1.22.
الميزة الرئيسية لـ P-regulators هي بساطتها الشديدة. لا تحتوي العناصر الوسيطة لهذه المنظمات (انظر الشكل 1.7 ، أ) على وسائل تصحيحية ولا تؤدي إلا وظائف تضخيم إشارة الخطأ من حيث القدرة وتحويل الطبيعة المادية لهذه الإشارة. لسوء الحظ ، فإن دقة التحكم التي توفرها وحدات التحكم P منخفضة نسبيًا ، خاصة بالنسبة للكائنات ذات الخصائص الديناميكية الضعيفة. في كثير من الحالات ، يؤدي تطبيق قانون الرقابة التناسبية إلى خطأ ثابت (انظر الفقرة 1.9).
تميز المعادلة (1.32) طريقة واحدة فقط من الطرق الممكنة لبناء وحدات التحكم الأوتوماتيكية. النهج الثاني هو أنه ليس حجم الإجراء التنظيمي ، ولكن معدل تغييره يعتمد على إشارة الخطأ.
إذا كانت التبعية (1.34) خطية ، إذن
يسمى قانون التحكم (1.36) قانون التحكم المتكامل ، ويطلق على وحدة التحكم المقابلة اسم وحدة التحكم المتكاملة أو وحدة التحكم I. في الممارسة العملية ، يتم تنفيذ الاعتماد (1.36) عن طريق إدخال أجهزة في وحدة التحكم التي تدمج إشارة الإدخال. في كثير من الحالات ، تكون هذه الأجهزة هي مشغلات الأنظمة الأوتوماتيكية (انظر الشكل 1.12).
تُستخدم المُنظِّمات المتكاملة من أجل زيادة دقة تشغيل البنادق ذاتية الدفع في ظروف الحالة المستقرة (انظر الفقرة 1.9). لكن
سلوك أنظمة التحكم مع وحدات التحكم I في أوضاع غير مستقرة ، كقاعدة عامة ، تبين أنه غير مرض ، وعلى أي حال ، أسوأ مما هو عليه في الأنظمة التي تستخدم قانون التحكم النسبي. تم الكشف عن أسباب ذلك من خلال مقارنة العلاقات (1.33) و (1.36). في إطار المثالية المقبولة (مع إهمال القصور الذاتي لعناصر التحكم) في وحدة التحكم P بالمعادلة (1.33) ، يتغير إجراء التحكم فورًا عندما يتغير الخطأ x. هذا يعني أنه عند حدوث خطأ ، يتخذ P-controller على الفور تدابير للقضاء عليه. هناك صورة مختلفة تجري في I-controller. على سبيل المثال ، عندما يكون من المعادلة (1.36) يتبع ذلك
وهذا يعني أن فترة زمنية معينة ستمر قبل أن تنحرف الهيئة التنظيمية بمقدار كافٍ لإزالة الخطأ الذي ظهر. مثل هذا "التأخر" في عملية تغيير الإجراء التنظيمي من عملية تغيير الخطأ x يمكن أن يؤدي (وإلى أنظمة حقيقيةغالبًا ما يؤدي) إلى حدوث تذبذبات ضعيفة التخميد أو حتى متباعدة للمتغير المتحكم فيه بالنسبة لقيمته المطلوبة.
يمكن التخلص من العيب الملحوظ لمنظمي I بسهولة عن طريق الجمع بين المعادلتين (1.33) و (1.36) ، أي عن طريق تصميم وحدة التحكم بطريقة
أين هو معامل التناسب.
يسمى قانون التحكم (1.37) قانون التحكم النسبي المتكامل ، ويطلق على وحدة التحكم المقابلة اسم وحدة التحكم النسبية المتكاملة ، أو وحدة التحكم PI. نظرًا لوجود مكون متكامل على الجانب الأيمن من المعادلة (1.37) ، لا تحتوي وحدات تحكم PI على خطأ ثابت. يتم ضمان السلوك الجيد لـ ACS مع وحدات تحكم PI في أوضاع غير ثابتة (في الديناميكيات) (مع الحساب الصحيح لوحدة التحكم) بسبب المكون النسبي لقانون التحكم. جعلت الميزات المذكورة من الممكن استخدام وحدات تحكم PI على نطاق واسع في أنظمة التحكم للأغراض الصناعية العامة.
معادلة التفريق (1.37) فيما يتعلق بالوقت نحصل عليها
![]()
من مقارنة (1.38) مع (1.35) ، يمكن ملاحظة أن تحسين الخصائص الديناميكية لـ ACS مع وحدات تحكم PI (مقارنة بالأنظمة التي تستخدم قانون التحكم المتكامل) يتم تحقيقه من خلال إدخال عنصر في قانون التحكم يتناسب مع المشتق الزمني لإشارة الخطأ ، أو (باختصار) عن طريق إدخال مشتق في القانون
اللائحة. هذا الاستنتاج صحيح ليس فقط بالنسبة لوحدات التحكم I ، ولكن أيضًا للأنواع الأخرى من وحدات التحكم.
يعد إدخال أحد المشتقات في قانون التحكم أداة قوية لتحسين سلوك ACS في أوضاع غير مستقرة. على وجه الخصوص ، من أجل تحسين ديناميكيات ACS ، غالبًا ما يتم إدخال مشتق الخطأ في قانون التحكم النسبي. والنتيجة هي قانون التحكم النسبي التفاضلي
![]()
يطلق على المنظمين مع قانون التحكم (1.39) اسم المنظمين PD باختصار. إنهم لا يتفاعلون مع الخطأ نفسه فحسب ، بل يتفاعلون أيضًا مع اتجاه تغييره. على سبيل المثال ، في حالة زيادة الخطأ x ، ويكون إجراء التحكم في وحدة تحكم PD أكبر منه في وحدة التحكم P (نعتبر المعاملات موجبة). على العكس من ذلك ، مع انخفاض الخطأ ، ستكون القيمة في وحدة تحكم PD أقل أيضًا من وحدة التحكم P. تساهم طبيعة تشغيل وحدة التحكم PD في التخميد (التبريد) للتذبذبات التي تحدث في ACS بسبب القصور الذاتي للعناصر الفردية للنظام. علاوة على ذلك ، فإن وحدة التحكم PD تدخل حيز التنفيذ بالفعل عندما يكون هناك معدل تغيير في الخطأ الذي نشأ نتيجة لبعض الاضطرابات.
في الممارسة العملية ، يتم إدخال المشتق في قانون التحكم بمساعدة أجهزة التفرقة الخاصة ، والتي تتناسب قيمة مخرجاتها مع مشتق قيمة الإدخال. ومن الأمثلة على هذه الأجهزة فوارق سلبية الدوائر الكهربائية، ومولدات التاكوجين ، ومضخمات التشغيل ، وما إلى ذلك (انظر الفقرة 2.9).
التنظيم فقط على مشتق إشارة الخطأ ، أي أن استخدام قانون التحكم غير عملي ، فقط لأن المتحكم بقانون التحكم هذا لا يستجيب على الإطلاق للأخطاء الثابتة ذات الحجم الكبير بشكل تعسفي (بالقيمة)
بالإضافة إلى وحدات تحكم PI و PD ، غالبًا ما تستخدم وحدات تحكم PID مع قانون التحكم النسبي التفاضلي التفاضلي في ممارسة التنظيم
حيث يوفر المصطلح المتناسب مع تكامل الخطأ الدقة المطلوبة لعملية ACS في ظروف الحالة المستقرة ، والمصطلح المتناسب مع معدل تغيير الخطأ مصمم لتحسين الخصائص الديناميكية لـ ACS.
تعتبر قوانين الرقابة (1.33) و (1.36) و (1.40) المذكورة أعلاه من بين أبسط القوانين. في أكثر تعقيدا
في الحالات ، يمكن إدخال العديد من تكاملات إشارة الخطأ في قانون التحكم. يمكن تقديم المشتقات ليس فقط من الأول ، ولكن أيضًا من الطلبات الثانية والأعلى ، وليس فقط من إشارة الخطأ ، ولكن أيضًا من القيمة المضبوطة أو أي إحداثيات وسيطة للنظام. في الهيئات التنظيمية التي تطبق مبدأ التنظيم المشترك ، يحتوي قانون التنظيم على مصطلحات تعتمد على الاضطراب المقاس لمشتقاته وتكامله ، إلخ.
تعتبر الأجهزة التي تعمل على إدخال المشتقات والتكاملات في قانون التحكم حالة خاصة من أجهزة التصحيح ACS. تمت مناقشة نظرية هذه الأجهزة وأسئلة حسابها بالتفصيل في الفصل. 6.
المعادلات (1.33) و (1.36) و (1.37) و (1.39) و (1.40) خطية بالنسبة للمتغيرات المدرجة فيها. في هذا الصدد ، تسمى قوانين التحكم المقابلة أيضًا خطية.
في هندسة التحكم ، يتم أيضًا استخدام قوانين التحكم الخطية وغير الخطية. يمكن أن تكون العلاقات (1.32) و (1.34) بمثابة أبسط الأمثلة لمثل هذه القوانين إذا كانت الوظائف التي تظهر فيها مختلفة عن الوظائف الخطية.
قوانين الترحيل هي الأكثر شيوعًا بين قوانين التحكم غير الخطية. على سبيل المثال ، بافتراض المعادلة (1.32)
أين هي القيمة القصوى للإجراء التنظيمي ، نحصل على ما يسمى بقانون التحكم في الترحيل ثنائي الموضع. في
أين هي القيمة التي تميز المنطقة الميتة لوحدة التحكم ، تحدد العلاقة (1.32) قانون التحكم في الترحيل ثلاثي المواضع ، إلخ.
إن استخدام قوانين التحكم في الترحيل في كثير من الحالات يجعل من الممكن حل مشكلة التحكم الآلي في هذا أو ذاك الكمية الماديةوسائل تقنية بسيطة للغاية ، مع وزن صغير وأبعاد لمعدات التحكم وسرعتها العالية. في كثير من الحالات ، يتيح استخدام القوانين غير الخطية للتنظيم والرقابة تحقيق مثل هذه النتائج التي لا يمكن تحقيقها من حيث المبدأ بمساعدة المنظمين الخطيين (انظر الفصل 8). لذلك ، يتم حاليًا تطوير الاتجاه المرتبط بتطوير وتطبيق قوانين التحكم غير الخطية بشكل مكثف.
في التبريد وهندسة التبريد ، وكذلك في أنظمة تكييف الهواء ، يتم استخدام أجهزة التحكم الأوتوماتيكية الصناعية التي تطبق قوانين التحكم المختلفة على نطاق واسع.
تحدد معادلة المنظم ، التي تعكس قانون تنظيمها ، اعتماد تشكيل إشارة التحكم (الإخراج) U () ، التي تعمل على الهيئة التنظيمية RO ، على انحراف القيمة الخاضعة للرقابة Δy(إشارة الإدخال) من القيمة المحددة.
في هذا الطريق، قانون التنظيم - هذا نوع من العلاقة الرياضية بين قيم المخرجات والمدخلات لوحدة التحكم.
يظهر الشكل المبسط لنظام التحكم الآلي في الشكل. 3.3
الشكل 3.3. رسم تخطيطي وظيفي لـ ACP
مبدأ تشغيل ASR. قيمة مضبوطة ذكائن أتمتة ، يشار إلى قيمته في الوقت الحالي ذ t ، يدخل عنصر المقارنة لوحدة التحكم ES ويقارن بالقيمة المحددة ذ مؤخرة. عند إخراج ES ، يتم إنشاء إشارة عدم تطابق Δy = ص مؤخرة -ص ر، قيمته هي البيانات الأولية لتشكيل إشارة التحكم. بالقيمة Δyونوع قانون التحكم المضمن في الأشعة فوق البنفسجية المشكل للمضخم ، عند إخراج وحدة التحكم الأوتوماتيكية AR ، يتم تشكيل إشارة تحكم U ، تحدد معلماتها سلوك الهيئة التنظيمية RO (سرعة وحجم الحركة).
قيمة الإدخال للكائن المتحكم فيه x(المادة أو الطاقة) التي تؤثر على حالة المتغير الخاضع للرقابة ذ، تحت تأثير التناضح العكسي ، إلى إجراء تنظيمي x ر، قادرة على تعويض الاضطراب F، والتي انحرفت القيمة الخاضعة للرقابة عن القيمة المحددة.
وفقًا لنوع إشارة التحكم ، يتم تقسيم قوانين التحكم إلى منفصلة: نبض (AI ، SHI ، CHI) أو موضعي (اثنان ، ثلاثة ، ومتعدد المواضع) ، ومستمر: متناسب (P) ، متكامل (I) ، التفاضلية (D) ، ومجموعاتها: التكامل النسبي (PI) ، التفاضل النسبي (PD) والمشتق النسبي المتكامل (PID). وفقًا لهذه القوانين ، يُشار إلى وحدات التحكم الصناعية المستمرة باسم P-controller و PI-controller و PD-controller و PID-controller ، وتسمى وحدات التحكم المنفصلة: أجهزة تحكم ثنائية أو ثلاثية أو متعددة المواضع.
المنظمون الذين لديهم قوانين تنظيمية مختلفة لديهم عملياتهم العابرة ، والتي تؤدي إلى حركة الهيئة التنظيمية وتغيير في إمداد المادة أو الطاقة لموضوع التنظيم.
تفسير. لضمان الجودة المطلوبة للعملية التكنولوجية في كائن التحكم ، في الوضع الانتقالي ، يتم تحديد نوع وحدة التحكم ويتم حساب معلمات الضبط الخاصة بها. يتم حساب إعدادات وحدة التحكم وفقًا للمعلمات الديناميكية للكائن المنظم: ثابت الوقت Tob وقيمة التأخير τrev.
3.1.3.1. وحدات تحكم منفصلة.
يتم وصفها بواسطة قوانين التنظيم غير الخطية وتنقسم إلى دفعةو الموضعية.
نبض (منفصل في الوقت المناسب).
يمكن أن تأخذ قيمة مخرجاتها U أي قيمة ، ولكن فقط في فترات زمنية معينة. في الفترات الفاصلة بين النبضات ، تختفي الإشارة. عدد النبضات محدود في الفترة الزمنية ∆Т = - τ 1.
يوضح الشكل 3.4 خصائص AR مع قوانين التحكم في الاندفاع.
الشكل 3.4. قوانين الاندفاع للتنظيم
تنقسم قوانين الاندفاع للتنظيم إلى:
السعة النبضية (AI) ؛
عرض النبض (PWM) ؛
نبض التردد (PHI)
الموضعية (منفصلة من حيث المستوى).
تحتوي إشارة خرجهم U على عدد ثابت (محدود) من قيم الإخراج (اثنان أو ثلاثة أو عدة). تسمى هذه القوانين ، وبالتالي ، الهيئات التنظيمية ، ثنائية وثلاثية ومتعددة المواقف.
تظهر خصائص قوانين التنظيم الموضعية في الشكل. 3.5
الشكل 3.5. قوانين التنظيم الموضعية
تحت تأثير الإشارة في تيالقادمة من المستشعر وإشارة عدم التطابق المتولدة أنتتعمل إشارة خرج المنظم U على المنظم ، والذي يمكن أن يأخذ أحد المواضع المقابلة لـ U1 ، U2 ... Un ، أي يقومون بإجراء تنظيمي متدرج.
أبسط قوانين التحكم الموضعي وأكثرها استخدامًا هو قانون الموضعين ، حيث تأخذ إشارة الخرج قيمتين فقط للحالة المستقرة 1 أو 0.
(القسم 3. إدارة مرافق الطاقة في القاعدةمنفصلة وقوانين مستمرة
اللائحة
تعتمد خصائص أنظمة التحكم الآلي على خصائص الكائن وخصائص وحدة التحكم. لذلك ، عند تصميم نظام تحكم آلي ، مع مراعاة خصائص الكائن ، فإنهم يبررون استخدام نوع أو آخر من المنظم بحيث يكون نظام التحكم الآلي بسيطًا قدر الإمكان وموثوقًا وله خصائص تلبي متطلبات التشغيل من حيث دقة الحفاظ على المعلمة الخاضعة للرقابة وجودة العملية العابرة.
وبالتالي ، بناءً على خصائص الكائن والمتطلبات التشغيلية لمعلماته ، يتم تحديد نوع أو آخر من وحدات التحكم وقانون التحكم الذي يشكله.
لا يمكن إجراء ضبط أنظمة التحكم الآلي إلا إذا كان موظفو التشغيل يعرفون الأسس النظرية للتحكم الآلي.
كما هو موضح سابقًا ، تتمثل مهمة التحكم الأكثر شيوعًا في الحفاظ على قوانين التغيير المحددة في وقت معلمات الكائن (التنظيم). يسمى الجهاز الذي يقوم بإجراء التحكم "المنظم". تشمل الهيئات التنظيمية روابط ديناميكية بسيطة ، تجمع بين تحقيق الخصائص المؤقتة المطلوبة لنظام التحكم في ظل التأثيرات العشوائية وتغييرات الحمل. في هذه الحالة ، تكون معلمة الإدخال لوحدة التحكم مؤشرًا واحدًا أو عدة مؤشرات لعملية الكائن:
اعتمادًا على كيفية تشكيل إجراء التحكم ، يتم تمييز قوانين التحكم والجهات التنظيمية المقابلة لها:
الترحيل ، تحقيق قانون تحكم غير خطي ثنائي الوظيفة
متناسب (ثابت ، أو أجهزة ردود الفعل الصعبة)
أجهزة متكاملة (ثابتة ، حلقة مفتوحة)
تكامل متناسب (متساوي ، أو أجهزة ذات ملاحظات متلاشية)
المشتق النسبي (الأجهزة الثابتة مع الترقب)
تفاضل تكاملي متناسب (أجهزة متساوية مع تقدم).
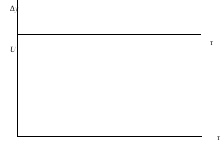
فيما يتعلق بالتركيبات مع محركات الاحتراق الداخلي ، يتم تطبيق قانون التحكم في الترحيل في أنظمة التحكم في الضغط والمستوى ، بمساعدة مرحل ثنائي الموضع ، يتم تشغيل المضخات والضواغط وإيقاف تشغيلها. لتجنب عمليات البدء والتوقف المتكررة للآليات ، يتم تعيين فاصل زمني معين بين قيم المعلمة الخاضعة للرقابة المقابلة للتبديل وإيقاف تشغيل المرحل (المنطقة الميتة).
يتم تنفيذ قوانين التحكم المتبقية بشكل رئيسي في أجهزة التحكم في السرعة.
يظهر جدول التنظيم وفقًا لقانون الترحيل في الشكل. 23.
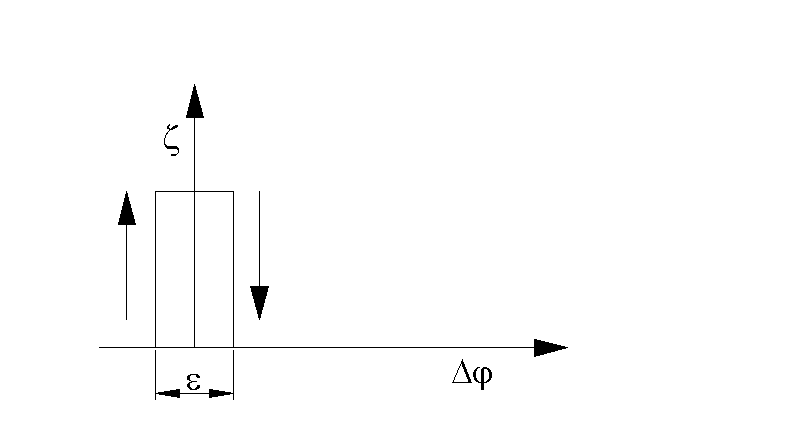
تنتج وحدات التحكم النسبية إجراء تحكم في شكل اعتماد خطي على الانحراف عن انحراف المعلمة الخاضعة للرقابة:
حيث k p هو الكسب على القناة التنظيمية.
يظهر اعتماد إجراء التحكم على انحراف المعلمة الخاضعة للرقابة في الشكل 24.
نظرًا لأن موضعًا معينًا لجهاز التحكم في الحالة المستقرة يجب أن يتوافق مع حمولة معينة ، فمن المستحيل تنفيذ التنظيم على نطاق الحمل بأكمله دون حدوث خطأ معين ، يسمى تدلى المنظم:
يقوم المنظمون المتكاملون بتنفيذ قانون إجراءات التحكم في شكل صيغة:
 ,
,
حيث T و هو وقت التكامل.
يمكن استخدام المنظم المتكامل كمفتاح حد ، والذي يحمي النظام من تجاوز حدود التسامح المحددة للانحراف المتحكم فيه في حالة حدوث عطل.
يجب أن توفر المنظمات ذات الوضع الكامل تغييرًا في القيمة الخاضعة للرقابة عبر النطاق الكامل للقيم المحددة ، بغض النظر عن الحمل. يستقبل الأفعى إشارة عبر قناة القياس من القيمة الفعلية للمعامل ومن خلال قناة جهاز الإعداد. لتحسين خصائص العملية العابرة عند تغيير الوضع أو أثناء التأثيرات العشوائية ، يتم إدخال ارتباط متكامل أو تفاضلي ، أو كلا الرابطين ، اللذين يعملان بالتناوب ، في أجهزة التحكم.
في وحدات التحكم التناسبية المتكاملة ، يتم وصف إجراء التحكم بالمعادلة:
 ,
,
حيث يحدد المصطلح الأول الجزء المتناسب ، والثاني - الجزء المتكامل.
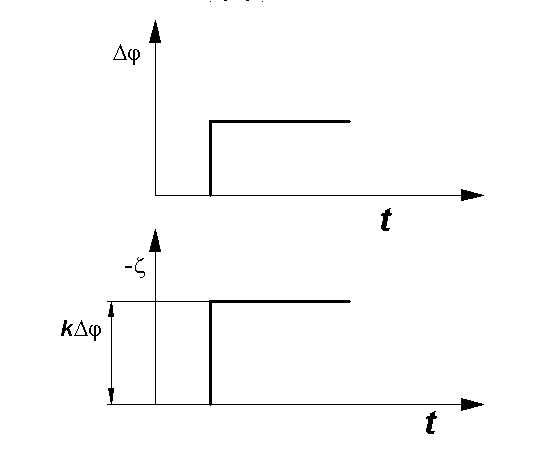
في وحدات التحكم التناسبية التفاضلية ، يتم وصف إجراء التحكم بالمعادلة:
حيث T d هو وقت التمايز.
تتيح هذه الهيئات التنظيمية زيادة حجم إجراء التحكم مؤقتًا وتقليل الوقت المستغرق للوصول إلى حالة مستقرة جديدة.
في وحدات التحكم التناسبية التفاضلية المتكاملة ، يتم وصف إجراء التحكم بالمعادلة:
تتيح هذه الهيئات التنظيمية تحقيق أفضل أداء عابر من خلال تحقيق انحراف صفري للقيمة التي يتم التحكم فيها عن القيمة المحددة عبر نطاق التحميل بأكمله.
تم تنفيذ جميع أنواع المنظمين المدرجة في الأصل في الصناعة المحلية في شكل أجهزة ووحدات للنظام العالمي لعناصر الأتمتة الهوائية الصناعية (USEPPA). كان عيب هذه الأجهزة هو وجود ثقوب معايرة وقنوات ذات قطر صغير ، والتي يمكن أن تنسد بسبب الإعداد السيئ لوسط العمل (الهواء). حاليًا ، يتم استخدام المنظمين الإلكترونيين ، حيث يتم إجراء عمليات التمايز والتكامل باستخدام الدوائر الإلكترونية والمعالجات الدقيقة.
في السابق ، كانت هناك أنواع أخرى من تصنيف الهيئات التنظيمية.
وفقًا لطريقة تأثير الطاقة لجزء القياس من المنظم من جانبه التنفيذي ، يتم تقسيم المنظمين إلى فئتين: منظمات العمل المباشر وغير المباشر. يوضح الشكل 25 أ مخطط كتلة لنظام التحكم مع منظم يعمل مباشرة ، الشكل 25 ب - مع منظم غير مباشر.
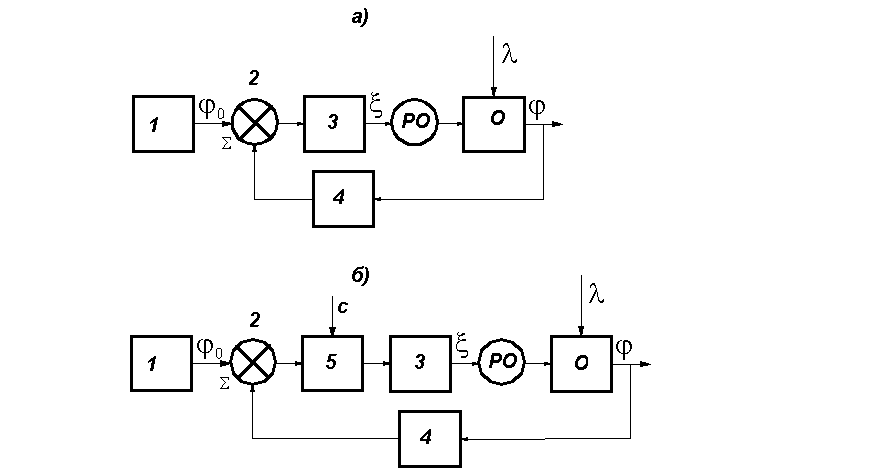
1 - عنصر المهمة ، 2 - عنصر المقارنة ، 3 - مشغل ، 4 - عنصر حساس ، 5 - مكبر للصوت ، RO - هيئة تنظيمية ، O - كائن
يتكون المنظم ذو التأثير المباشر من جهاز قياس (بما في ذلك عنصر حساس 4 ، وعنصر مهمة 1 وعنصر مقارنة 2) ، ومشغل 4 يغير الهيئة التنظيمية في الاتجاه المطلوب. يجب أن يكون للمشغل ناتج محدد جيدًا (أو كما يطلق عليه عادة ، التقليب) قوة لتحريك التناضح العكسي. في منظم التمثيل المباشر ، يتم إنشاء قوة التعديل اللازمة بواسطة عنصر استشعار.
في حالة استحالة تصميم عنصر حساس مضغوط يطور القوة المطلوبة ، يتم إدخال مكبر 5 في تصميم المنظم ، والذي يستخدم طاقة خارجية إضافية (ج) لتضخيم قوة العداد. يسمى هذا المنظم بالمنظم غير المباشر.
تم تقسيم المنظمين إلى الفئات التالية وفقًا لطريقة ضمان مهمة التنظيم:
منظمات إستاتيكية
منظمات ثابتة
وحدات تحكم البرامج
اثنين من وحدات تحكم الموقف.
في أمثلة أبسط منظمات الضغط ، يمكن للمرء أن يفهم الاختلاف في تصميم المنظمين الساكنين والاستاتيكيين. على التين. يُظهر الشكل 26 منظم ضغط استاتيكي.
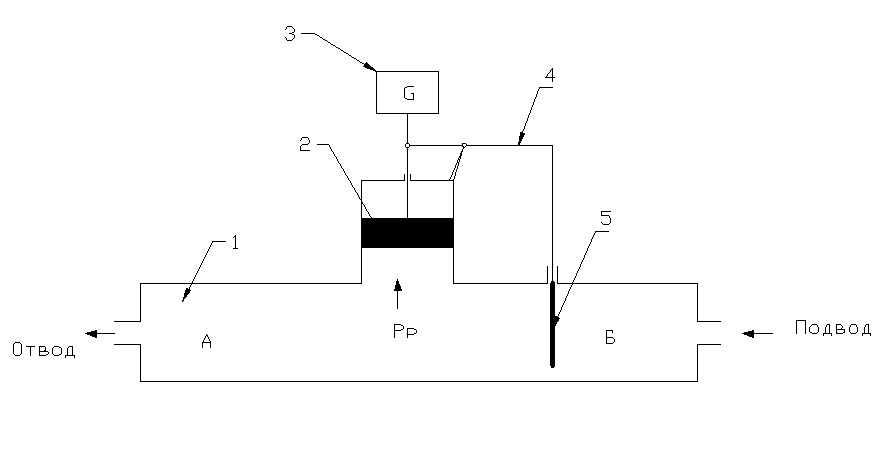
أرز. 26 منظم ضغط استاتيكي
1 - جسم قابل للتعديل ، 2 - مكبس (عنصر استشعار) ، 3 - تحميل (عنصر الضبط وعنصر المقارنة) ، 4 - ذراع ناقل الحركة (مشغل) ، 5 - بوابة (هيئة تنظيمية)
يوجد في تدفق الغاز جهاز تنظيم 5 بمقاومة متغيرة ، بسبب الضغط المتغير عند المدخل ، من الممكن الحفاظ على ضغط ثابت في التجويف أ. في وضع التوازن ، يوجد توازن بين عند تزويد الغاز وإزالته ، فإن الضغط في تجويف العمل A يتوافق مع القيمة المحسوبة P p ومتوازن بواسطة الحمل G. عندما يتغير الحمل (التراجع) ، يختل التوازن ، واعتمادًا على طبيعة التغيير ، يتناقص أو يزداد الضغط في التجويف A. ومع ذلك ، ليس من الممكن دائمًا الحصول على توازن مستقر جديد بدون تقلبات ثابتة. هو العيب الرئيسي للمنظمين الاستاتيكية.
في منظم ثابت (الشكل 27) ، يكون عنصر المهمة هو دعامة الزنبرك العلوي 4 ، وعنصر المقارنة هو الزنبرك 3. يختلف مقدار القوة المؤثرة على المكبس من جانب الزنبرك اعتمادًا على موضع المكبس في ارتفاع. لهذا السبب ، لا توجد واحدة ، كما في الحالة السابقة ، ولكن تنشأ مجموعة من حالات توازن الضغط. لذلك ، إذا بدأ الضغط P في الزيادة ، يمكن للمكبس ، الذي يرتفع ويضغط الزنبرك ، أن يتخذ موقعًا جديدًا ، حيث يتوافق الضغط المتزايد مع قوة الزنبرك المتزايدة. وبالتالي ، وحدة تحكم ثابتة مع وجود خطأ ثابت متعمد. ترتبط قيمة المعلمة المدعومة بشكل فريد بحجم الحمل.
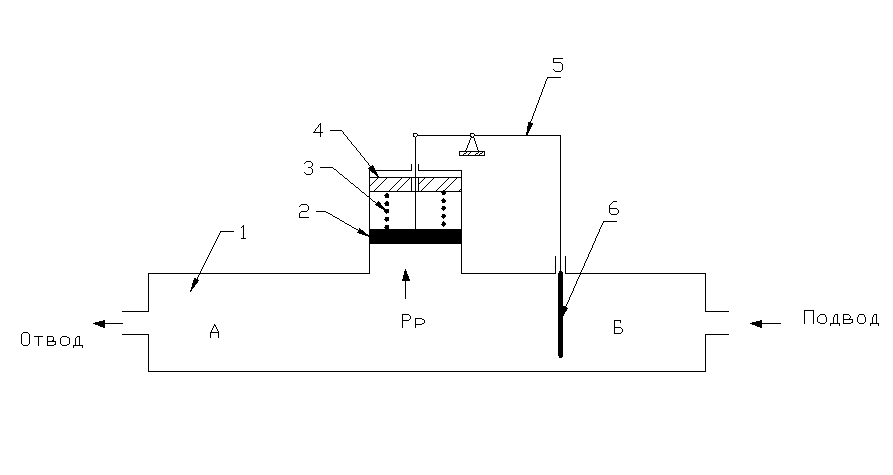
أرز. 27 منظم ضغط ثابت
1 - جسم قابل للتعديل ، 2 - مكبس (عنصر استشعار) ، 3 - زنبرك (عنصر مقارنة) ، 4 - دعم نابض علوي (عنصر مقارنة) ، 5 - ذراع ناقل حركة (مشغل) ، 6 - بوابة (جسم تنظيمي)
توفر منظمات البرامج عنصرًا هيكليًا إضافيًا يغير تنسيق المهمة ، وبالتالي القيمة الخاضعة للرقابة ، وفقًا لاعتماد وظيفي معين على الحمل ، في الوقت المحدد أو على كميات أخرى.
في وحدات التحكم على التشغيل ، يتم تنفيذ قانون التحكم في الترحيل. تعمل الهيئات التنظيمية من هذا النوع على مبدأ التشغيل والإيقاف.
تصنيف المنظمين الآليين.
وفقًا لطريقة التأثير على الهيئة التنظيمية ، فإن الجهات التنظيمية التلقائية هي من الإجراءات المباشرة وغير المباشرة. في المنظمين فعل مباشريؤثر العنصر الحساس بشكل مباشر على الجسم المنظم ، باستخدام الطاقة المتلقاة من البيئة المنظمة. لديهم جهاز قياس ومشغل متكامل مع الهيئة التنظيمية ويعملون عليه من خلال التوصيلات الميكانيكية. العيب الرئيسي لمنظمي العمل المباشر هو عدم ملاءمتها للتحكم عن بعد.
في المنظمين عمل غير مباشرتقع على مسافة كبيرة من الهيئات التنظيمية ، ويتم التحكم في الهيئة التنظيمية بمساعدة الطاقة المستلمة من مصدر خارجي.
وفقًا لنوع الطاقة التي تحركها ، يتم تقسيم المنظمين إلى هوائي وهيدروليكي وكهربائي ومجتمعة.
في هوائييستخدم المنظمون طاقة الهواء المضغوط. هذه المنظمات موثوقة في التشغيل وآمنة من حيث الحريق.
في هيدروليكييستخدم المنظمون طاقة السائل (الزيت أو الماء). إنها موثوقة في التشغيل ويمكن أن تطور قوى تحويل كبيرة على المشغل. ومع ذلك ، فإن لها عددًا من العيوب: نطاق محدود يحدده طول خط الأنابيب الدافع ، واعتماد الأداء على درجة حرارة مائع العمل وقابلية الاشتعال (في حالة استخدام الزيت).
الأكثر انتشارًا الكهرباءمنظمات ، وهي مقسمة إلى كهروميكانيكية وإلكترونية. الميزة الرئيسية للمنظمات الكهربائية مقارنة بالمنظمات الهوائية والهيدروليكية هي إمكانية نقل نبضات القيادة إلى أجهزة وسيطة ومشغل على مسافات غير محدودة عمليًا بأقل تأخير.
في مجموعتستخدم المنظمين نوعين من الطاقة في وقت واحد: في الطاقة الكهربية الهوائية - الطاقة الكهربائية و هواء مضغوط، في الطاقة الكهروهيدروليكية - الكهربائية والسائلة ، في الهواء المضغوط والسائل. يتيح لك هذا المزيج تعظيم فوائد كل نوع من أنواع الطاقة.
وفقًا لطبيعة التأثير التنظيمي ، تنقسم الهيئات التنظيمية التلقائية إلى عدة أنواع.
متحكمات الموقف.قد تشغل الهيئة التنظيمية وظيفتين أو ثلاثة مناصب محددة. تلقى المنظمون ذوو المركزين والثلاثية أكبر طلب.
المنظمات التناسبية (الثابتة).تغير الهيئة التنظيمية موقفها وفقًا لنفس النمط الذي تتغير فيه القيمة المنظمة ؛ تتناسب سرعة حركة الجسم المنظم مع معدل تغير المتغير المتحكم فيه.
منظمات ثابتة.عندما ينحرف المتغير المتحكم به عن القيمة المحددة ، يتحرك عنصر التحكم ببطء أكثر أو أقل ودائمًا في نفس الاتجاه حتى
حتى يصل المتغير المتحكم به إلى القيمة المحددة.
منظمات متساوية.فهي تجمع بين خصائص المنظمين الاستاتيكيين والاستاتيكيين وتضمن الحفاظ على القيمة المحددة للمتغير المتحكم فيه دون انحراف متبقي. يمكن للهيئة المنظمة أن تحتل أي مكان في نطاق عملها.
المنظمون ، مع التقدم.لديهم جهاز إضافي ، بفضله تستمر عملية التنظيم مع مراعاة معدل تغيير القيمة المنظمة. في هذه المتحكمات ، إلى الإجراء النسبي ، يتم إضافة تأثير إضافي من معدل تغير المتغير المتحكم فيه ، مما يتسبب في تحرك الهيئة المنظمة مع قيادة معينة ، والتي تزيد مع زيادة معدل تغير المتغير المتحكم فيه . مع انخفاض معدل تغير المتغير المتحكم فيه ، تتناقص هذه الحركة الرائدة أيضًا وتتوقف تمامًا عندما يتوقف المتغير المتحكم فيه عن التغيير.








")
























