اللائحة - هذه عملية يتم خلالها قياس كمية ، تسمى الكمية الخاضعة للرقابة ، باستمرار ، ومقارنة القيمة المقاسة بقيمة كمية أخرى ، تسمى الكمية الرئيسية ، واعتمادًا على نتيجة هذه المقارنة ، الكمية الخاضعة للرقابة من أجل تقليل الاختلاف بينه وبين الكمية الرئيسية. تتم عملية التأثيرات هذه في حلقة مغلقة تسمى حلقة أو نظام التحكم.
نظام التنظيم التلقائييتكون من كائن تحكم ومنظم تلقائي. في عملية التنظيم ، يكون المنظم وموضوع التنظيم مترابطين ، وبالتالي ، تعتمد جودة التنظيم على خصائص هذا الكائن وخصائص وخصائص المنظم والهيئة التنظيمية. أنظمة التحكم الآلي خطية وغير خطية ، اعتمادًا على الاعتماد الرياضي لقيم الإدخال والإخراج المترابطة للنظام.
في نظرية التحكم الآلي ، يتم النظر في ثلاثة أنظمة: نظام واحد ، يتكون من كائن واحد للتنظيم ومنظم واحد ؛ التحكم الآلي غير المرتبط - هذا هو العمل الذي لا يكون فيه عمل العديد من المنظمين مترابطًا ، ولا يمكنهم التفاعل إلا من خلال هدف مشترك من التنظيم ؛ إن التحكم الأوتوماتيكي المقترن هو الذي يتم فيه توصيل وتنسيق عمل العديد من المنظمين في كائن واحد مع بعضهم البعض.
يجب أن يفي كل نظام تحكم بالمتطلبات التالية: أن يكون مستقرًا في جميع أوضاع تشغيل المنشأة ؛ يجب أن تكون انحرافات القيمة المنظمة في عملية القضاء على الانتهاك صغيرة قدر الإمكان ؛ يجب أن يكون وقت القضاء على الاضطراب في حده الأدنى ؛ يجب أن يتعامل المنظم مع المهمة وألا يتجاوز انحرافات القيمة الخاضعة للرقابة ؛ يجب أن يكون الخطأ في الحفاظ على القيمة الخاضعة للرقابة هو الأصغر.
يمكن أن يؤدي التقليل من الخصائص المحددة لشيء ما ، على ما يبدو كعامل صغير ، إلى تشغيل غير مرض للنظام بأكمله. لذلك ، عند تصميم نظام تحكم آلي واختيار منظم ، من الضروري مراعاة الميزات المحددة للكائن المنظم. تعد مسألة اختيار وحدة التحكم وخصائصها هي القضية الرئيسية في عملية تصميم أنظمة التحكم الآلي.
لنفترض أنه في محرك الاحتراق الداخلي الذي تم اختباره على الحامل ، نظرًا لزيادة الحمل ، زاد انتقال الحرارة إلى الماء. سيؤدي ذلك إلى اضطراب نظام التحكم الآلي ، منذ ذلك الحين طاقة حراريةО ستزداد مقارنة بقيمتها في لحظة حالة التوازن. نتيجة لذلك ، ترتفع درجة حرارة الماء في نظام تبريد المحرك ، وبدلاً من القيمة المحددة +80 درجة مئوية ، ستكون ، على سبيل المثال ، مساوية لـ + 85 درجة مئوية. القيمة الفعلية للمتغير المتحكم فيه
يؤدي عدم الاتساق إلى تنشيط وحدة التحكم ، وقد تحدث العديد من حالات التنظيم اعتمادًا على خصائص الكائن نفسه ووحدة التحكم ، فضلاً عن صحة إعداده.
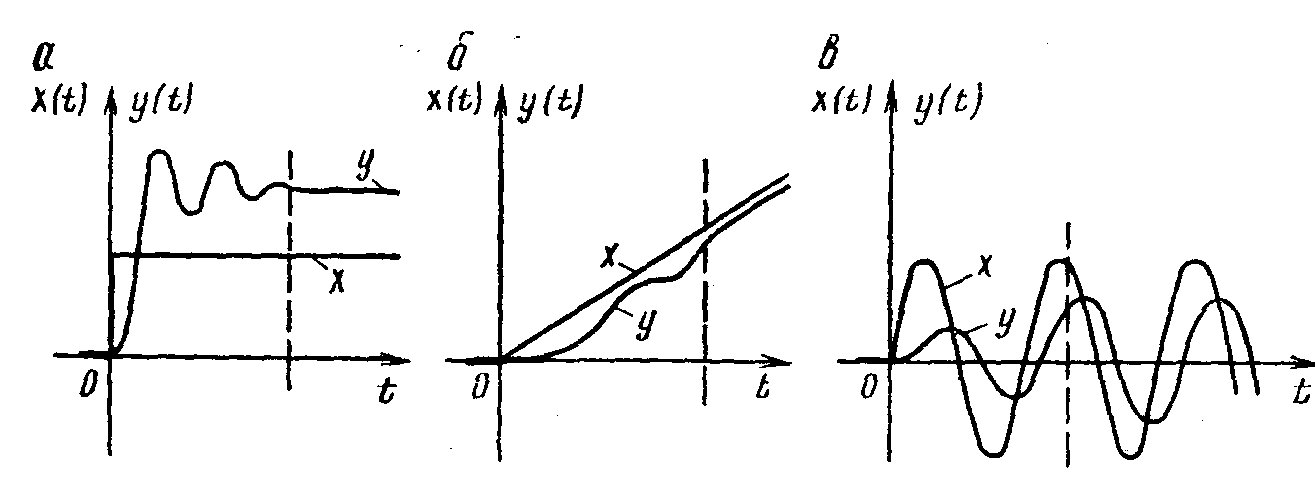
عملية غير دورية - عملية تتميز بحقيقة أنه بعد انحراف المتغير الخاضع للرقابة عن قيمة ثابتة ، فإنه يعود بشكل غير دوري إلى قيمة جديدة.
عملية تذبذبية ذات سعة مخففة - عملية يتغير فيها المتغير المتحكم فيه بالنسبة إلى القيمة المحددة بسعة مخمد.
هذه العمليات التنظيمية مستدامة ، أي بعد الاضطراب الناتج ، تأتي العملية في حالة توازن.
أنظمة غير مستقرة - هذه أنظمة تكون فيها القيمة الخاضعة للرقابة بعد الاضطراب وتشغيل المنظم. يرتكب الاهتزازات التوافقيةبالقرب من القيمة المحددة بسعة وتردد ثابتين ، أو تحدث التذبذبات التي تتباعد بسعة متزايدة باستمرار. في بعض الحالات ، يُسمح بالتنظيم غير المستقر ذي الطبيعة التوافقية للتغير في الحجم ، ولكن مع اتساع ضئيل للتقلب ، في الممارسة العملية ، على سبيل المثال ، مع تنظيم ثنائي الموضع لدرجة حرارة الماء.
هناك ثلاث طرق لتحديد ثبات نظام التحكم الآلي ، والتي وفقًا لها يتم اختيار وحدات التحكم المناسبة: رسومية وتحليلية وعملية ،
طريقة الرسم. وفقًا لهذه الطريقة ، من الضروري أولاً إيجاد قيم الكميات التالية تجريبيًا: كسب الكائن K0 ؛ ثابت وقت الكائن - T0 ؛ وقت التحكم ثابت - Tr ؛ كسب تحكم Kp ؛ وقت تأخير الكائن ر.
معامل الكسب للكائن Ko - هو نسبة الانحراف الأقصى لقيمة sigmamax إلى حجم الاضطراب lambda0 الذي تسبب في هذا الانحراف.
معامل كسب الكائن Ka هو المعاملة بالمثل لمعامل التسوية الذاتية p. التسوية الذاتية للعملية الخاضعة للرقابة هي خاصية الكائن الخاضع للرقابة بعد حدوث اضطراب للسعي للعودة إلى حالة التوازن دون تدخل خارجي .
كسب وحدة التحكم Kp هو نسبة قيمة الإخراج إلى قيمة انحراف delta_sigma المستلمة عند إدخالها.
الثابت الزمني للعنصر Т0 هو الوقت الذي يتم خلاله سرعة ثابتةسيصل التغيير في قيمة الأخير إلى قيمته المحددة بعد الاضطراب.
كو و إلى - الثوابتمميزة لهذا الكائن. Kr و Tr - يتم ضبطهما عند ضبط المنظم. بناءً على هذه الرسوم البيانية ، يمكن استخلاص الاستنتاجات التالية:
بالنسبة إلى Kp ، تؤدي الزيادة في القصور الذاتي لوحدة التحكم إلى نقل النظام إلى منطقة عملية التذبذب ؛
كلما طال الوقت Tr ، تأخر وحدة التحكم فيما يتعلق بالوقت الثابت T0 ، كلما كانت العملية أقل استقرارًا.
وبالتالي ، من أجل الحصول على نظام تحكم أوتوماتيكي مستقر ، من الضروري استخدام عناصر حساسة لا تعمل بالقصور الذاتي لتقليل Тр أو تثبيت هذه العناصر بعيدًا عن مكان الهيئة التنظيمية ، والتي ستزيد 0.
تتمثل الطريقة التحليلية في حل معادلات نظام التحكم الآلي. هذه الحسابات معقدة للغاية وهي قضية خاصة بنظرية التحكم الآلي ، وبالتالي لم يتم تناولها في هذه الورقة.
تتمثل الطريقة العملية في الحصول على منحنى لتسجيل عملية التحكم في كائن التشغيل ودراسة شدة توهين تذبذبات المتغير المتحكم فيه. عند دراسة المنحنى الناتج ، يجب الانتباه إلى شدة التخميد للتذبذبات. إذا حدث التخميد بشكل رتيب ، دون تقلبات ، فهذا يعني أن النظام غير دوري.
لتحديد استقرار العملية ، يتم تقديم مفهوم درجة التوهين.
درجة التوهين هي القيمة التي تميز توهين عملية التحكم ، يساوي النسبةالفرق بين سعتين متجاورتين مع الأولى.
درجة التوهين للعملية غير الدورية تساوي 100٪ ، حيث أن النصف الثاني من فترة التذبذب غائب.
في الممارسة العملية ، يتم تحديد درجة التوهين بواسطة معامل التوهين K ، والذي يتم تعريفه على أنه نسبة حجم التوهين الحالي إلى غير الدوري ، والذي يُؤخذ مساويًا لواحد. عند K = 1 ، تكون العملية غير دورية ؛ في K.< 1 процесс колебательный затухающий; при К - 0 процесс колебательный незатухающий; при К >حول هذه العملية متذبذبة ومتباينة. كلما زادت قيمة K ، زادت استقرار العملية.
يتم أخذ العملية العادية فيما يتعلق بالاستقرار عندما يكون معامل التوهين 0.5 عند درجة التوهين - = 80-95٪. يجب أن يؤخذ في الاعتبار أنه على الرغم من تقريب K> 1 ، تصبح العملية أكثر استقرارًا ، ولكن في نفس الوقت تزداد سعة التحكم الأولى ، مما يؤدي إلى تدهور الجودة ، وبالتالي ، عند ضبط وحدة التحكم ، كلا هذين العاملين يجب أن تؤخذ في الاعتبار.
عند psi - 0.8 ، t ، e ، عند K.< 0,5, процесс становится колебательным.
تتميز جودة التنظيم بالوقت الذي يقضيه في تثبيط الاضطراب المكتشف ، وانحراف القيمة عن القيمة المحددة ، والخطأ الثابت (الانحراف المتبقي للقيمة).
لا توجد معايير لهذه الأنواع من المؤشرات. يتم تحديد قيمها المثلى على وجه التحديد لكل كائن تجريبيًا ، بينما يجب على المرء أن يسعى لتقليل فترة الانتقال وتقليل الخطأ الثابت.
تتميز جودة التنظيم ليس فقط باستقرار النظام ، ولكن أيضًا أصغر القيمأمه وأوست. وبالتالي ، كلما كان التجاوز أصغر وكلما كانت الفترة الانتقالية أقصر أو أصغر انحراف سيجما عن سيجما المعين ، زادت جودة التنظيم.
بالنسبة لبعض أنظمة التحكم الآلي ، يمكن أن يصل الخطأ الثابت إلى قيم مهمة ، مما يشير إلى الاستخدام غير الصحيح لوحدات التحكم التناسبية ، والتي يجب استبدالها بوحدات تحكم ذات خاصية إجراء مختلفة.
في بعض الحالات ، لتحديد جودة التنظيم ، يتم رسم منحنى مثالي على الرسم البياني ، أي المنحنى المرغوب في عملية تنظيم معينة. بعد ذلك ، بمقارنة منحنى القياس الفعلي للمتغير الخاضع للرقابة e بالمنحنى المثالي ، يتم تحديد جودة التنظيم.
من الممكن تحسين جودة التنظيم من خلال زيادة ثبات التنظيم من خلال اختيار سرعة التنظيم والحساسية (المنظم الستاتيكي) ، ودرجة التفاوت ، واستخدام ما يسمى بأجهزة التمايز التي تغير معدل تغير القيمة ؛ استخدام المنظمين حول الترقب.
كائنات التنظيم. الخصائص الرئيسية لأجسام التحكم هي السرعة والتسوية الذاتية والتأخير ووقت التسريع.
قدرة الكائن المنظم هي مخزون الطاقة المتراكمة للجسم أو المادة المتراكمة فيه.
تؤثر الاضطرابات من نفس الحجم على التغيير في المتغير المتحكم به بطرق مختلفة. سيكون هناك نوعان مختلفان من أنظمة التبريد لمحركات الاحتراق الداخلي مع نفس التأثيرات المزعجة (تغيير الحمل) معان مختلفةمعدل تغير درجة الحرارة. وبالتالي ، كلما زادت سعة الكائن الخاضع للتنظيم ، كلما كان ذلك أبطأ ، في ظل ظروف أخرى مختلفة ، ستتغير القيمة الخاضعة للرقابة ، أي أن الكائنات ذات السعة الأكبر تكون أكثر استقرارًا.
يساهم التسوية الذاتية في استقرار الكائن الخاضع للرقابة ويسهل تشغيل المنظم.
تأخر العملية في كائن - هذا هو وقت تغيير القيمة المضبوطة ، التي تحسب من لحظة الفعل المزعج. التأخير متأصل ليس فقط في الكائن المنظم ، ولكن أيضًا في وحدة التحكم ، ويعتمد على القصور الذاتي للعنصر الحساس ، وحركية محرك الهيئة التنظيمية ونظام نقل الأوامر.
دفعة.
وقت تسريع الكائن - هذا هو الوقت الذي تتغير فيه القيمة الخاضعة للرقابة من الصفر إلى القيمة المحددة مع اضطراب لحظي بنسبة 100٪ من العامل المنظم ، بشرط أن يظل معدل تغير القيمة خلال هذا الوقت ثابتًا ولا يوجد حمل.
كلما زادت السعة ، زاد وقت التسريع. المنظمين. إن خاصية عمل الجهة المنظمة هي اعتماد حركة الهيئة التنظيمية على التغيير في القيمة المنظمة.
المنظمون المتقطعون هم. جهاز التحكم في العمل النبضي - جهاز تحكم به ارتباط نبضي يحول التغيير في متغير التحكم إلى سلسلة من النبضات ، تعتمد سعة أو مدتها أو ترددها على وضع التشغيل المحدد للرابط.
تحكم الموقف - منظم ، حيث يمكن أن يكون للتأثير على المشغل عدد معين من القيم المقابلة لعدد مواضع انحراف المتغير المتحكم فيه عن القيمة المحددة ، وتعتمد علامته على علامة الانحراف.
تشغيل / إيقاف منظم - منظم ، عندما تمر القيمة الخاضعة للرقابة من خلال القيمة المحددة ، ينقل الهيئة المنظمة من موضع متطرف إلى آخر ، مثل "مفتوح - مغلق".
تشمل المنظمات المستمرة ما يلي.
منظم متكامل (I-controller) والتي تتميز بغياب علاقة محددة بين التغيير في المتغير المتحكم به وحركة الهيئة التنظيمية.
تحكم نسبي (P-controller) ، حيث تؤدي انحرافات القيمة الخاضعة للرقابة إلى تشريد الهيئة التنظيمية التي تتناسب مع الحجم والسرعة.
تحكم PI (وحدة تحكم PI) - وحدة تحكم يتم فيها دمج خصائص وحدات التحكم النسبية (الثابتة) والمتكاملة ، مما يضمن الحفاظ على القيمة الخاضعة للرقابة عند قيمة معينة دون انحراف متبقي.
المشتق النسبي والضوابط المشتقة النسبية والتناسبية (وحدة تحكم PD و PID) هي وحدة تحكم متناسبة أو متكاملة ، حيث تتأثر حركة العنصر المنظم بشكل إضافي بمعدل تغير القيمة.
اختيار المنظمين . القضية الرئيسية في اختيار وحدات التحكم هي مسألة صحة تحديد الخصائص المطلوبة لعمل وحدة التحكم فيما يتعلق بالخصائص الديناميكية للكائن. في حالة عدم وجود وحدة تحكم ، يجبر الاضطراب قيمة الكائن على التغيير على طول منحنى معين متأصل في خصائص هذا الكائن. يعتمد أقصى انحراف للقيمة في ظل هذه الظروف على حجم الاضطراب: sigmamax \ u003d po * lambdao
يتم تحديد مدة الانحراف من خلال مدة الاضطراب. إذا تم تضمين هذا الكائن في النظام التنظيمي ، فمن الممكن تقليله قيمه مطلقهالانحراف سيجما والوقت الذي سيستمر خلاله الانحراف. ومع ذلك ، فإن وحدات التحكم ذات خصائص الحركة المختلفة تعطي نتائج تحكم مختلفة ، مما يجعل من الضروري اختيارها وفقًا لخصائص الكائن.
مع منظم تم اختياره بشكل صحيح وإعداده المناسب ، يجب أن تكون درجة التوهين في عملية التنظيم مساوية تقريبًا إلى 0.75.
في حالة عدم وجود معلومات حول الخصائص الديناميكية للكائن المصمم ، يتم اختيار المنظمين عن طريق القياس مع الكائنات الموجودة أو على أساس الاعتبارات الافتراضية حول خصائص هذا الكائن ، مع مراعاة معيار اختيار المنظمين ، باستخدام الأدبيات المرجعية.
بالنسبة لجسم تشغيل في وجود منحنيات تسريع ، أو خصائص تردد ، أو لكائن مصمم حديثًا ، حيث يتم أخذ منحنيات التسارع من كائن مشابه موجود ، يجب اختيار المنظمين على أساس الحسابات المقدمة في دورات خاصة حول نظرية التحكم الآلي.
تعمل كل محطة للتزود بالوقود بالتسلسل التالي:
بعد وصول السيارة إلى الموقع ، تقوم الناقلة ، بعد استلام بوليصة الشحن ، بوضعها في خلية عداد الغاز وتشغيل صمام التحكم. في نفس الوقت ، يتم توصيل شبكة مجاري الهواء من الضاغط. يقوم السائق بتثبيت فوهة التزود بالوقود في عنق الخزان والضغط على زر "بدء التشغيل". يؤدي هذا إلى تشغيل التتابع الوسيط K ، ويقوم z-contact K بتشغيل المغناطيس الكهربائي ، والذي يحول الصمام ثلاثي الاتجاهات إلى الموضع عندما هواء مضغوطمن الشبكة عبر الرافعة يدخل الغرفة الهوائية. هذا يفتح الطريق للوقود من خلال الصمام إلى البندقية. عند ملء الخزان ، يعمل العوامة على صمام إبرة الإغلاق ويفتحه عند مستوى معين ، ويطلق الهواء من الغرفة. عندما ينخفض الضغط في الغرفة الهوائية ، يقوم المفتاح بإيقاف تشغيل دائرة إمداد الطاقة لمحول K. يغلق الصمام مسار الوقود إلى البندقية.
تم تجهيز البندقية بصمام إغلاق غير رجعي ، والذي في لحظة انخفاض ضغط الوقود في الغرفة ، يغلق فجأة منطقة تدفق البندقية وبالتالي يمنع تسرب الوقود من البندقية. ل التوقف في حالات الطوارئيتم توفير مفتاح إيقاف والإمكانية التحكم اليدويصمام. في وضعية العمل ، يتم ضبط ضغط ~ 0.2 kgf / cm 2 في الغرفة الهوائية عن طريق مخفض الضغط. يتم تثبيت فتحة معايرة عند مخرج علبة التروس. المقطع العرضي لهذه الفتحة 2.5 مرة أصغر من منطقة تدفق صمام إبرة البندقية. هذا يضمن انخفاضًا في الضغط في الحجرة عند فتح صمام الإبرة.
في هذا المخطط ، يعمل المسدس الأوتوماتيكي الذي يمنع تدفق الوقود على النظام الهوائي للمخطط ، والذي يوقف إمداد الوقود. وتجدر الإشارة إلى أنه نظرًا لسلامة العمل ، من الضروري إعطاء الأفضلية للدائرة الكهرومائية الموصوفة.
هناك مجموعة متنوعة من الأنظمة التي تحل محل النشاط البشري. يتم استخدامها للتحكم وإدارة مجموعة واسعة من عمليات الإنتاج في جميع مجالات التكنولوجيا ، وكذلك في جميع مجالات النشاط البشري. تجمع هذه الأنظمة بين أجهزة ميكانيكية وهوائية وهيدروليكية وكهربائية وهندسة الراديو وأجهزة أخرى متنوعة للغاية ، مما يشكل مجموعة معقدة من العناصر التي تتفاعل مع بعضها البعض. نتيجة لذلك ، يختلف كل نظام عن الآخر. مخطط الرسم البياني، الغرض ، معلمة التحكم أو الإدارة ، مبدأ التشغيل ، طبيعة العمل.
مع هذا التنوع ، تفقد الدراسة التفصيلية لجميع الأجهزة معناها وضرورتها ، لأن هذا سيؤدي إلى عبء غبي على ذاكرة الطالب. ومع ذلك ، فإن مبادئ بناء هذه الأنظمة وطرق دراسة خصائصها تشترك في الكثير. لذلك ، على سبيل المثال ، يتكون نظام الحصول على معلومات حول حالة جهاز الإنتاج من عناصر قياسية متصلة في سلسلة لنقل الإشارات من جهاز الإنتاج إلى جهاز عرض المعلومات ، وعلى العكس من ذلك ، فإن نظام التحكم في عملية الإنتاج لديه سلسلة متسلسلة من العناصر لنقل التأثير على جهاز الإنتاج. لكن يمكن أن يحتوي كلا النظامين على عناصر متطابقة في الغرض.
في هذا الصدد ، وفقًا للميزة الوظيفية ، يمكن تمييز الأنواع الثلاثة الرئيسية لأنظمة الأتمتة: نظام التحكم (SC) ، ونظام التحكم (CS) ، ونظام التحكم الآلي (ACS).
نظام التحكم
يُفهم التحكم على أنه مجموعة من الأساليب والأدوات التي توفر معلومات حول حالة عملية الإنتاج والمرفق الذي يتم فيه تنفيذ العملية. يحرر نظام التحكم الشخص من المراقبة المباشرة لعملية الإنتاج ، حالة وحدة الإنتاج. بفضل استخدام أنظمة التحكم ، يتم استبدال بعض الأنشطة البشرية بوسائل تقنية ، وبالتالي يسمى هذا التحكم تلقائيًا.
تنشأ حاجة خاصة للتحكم الآلي عندما تتطلب عملية التحكم ، نظرًا لتعقيدها ، وقتًا طويلاً جدًا ، أو عندما تكون دقة التحكم عالية مطلوبة ، أو تتغير القيمة الخاضعة للرقابة بسرعة عالية تتجاوز القدرات البدنية للشخص. في كثير من الأحيان ، يكون التحكم ضروريًا بسبب عدم إمكانية وصول الشخص إلى موضوع التحكم بسبب تفاصيل تقنية الإنتاج.
تقيس أنظمة التحكم الآلي الكميات الفيزيائية المختلفة: درجة الحرارة ، والضغط ، والتدفق ، الجهد الكهربائيوالحالية ، الإجهاد الميكانيكي (الحمل) ، مستوى السائل و المواد السائبةوحركة الهيئات العاملة للآليات وأنظمة نقل التدفق. بفضل هذا ، يتحكمون في حجم وجودة منتجات المعالجة ، وفرز المنتجات ورفضها ، وحساب المنتجات النهائية ، والتحكم في حركة المرور ، والإشارة إلى ظروف الطوارئ. عمليات الانتاجإلخ.
يوضح الشكل 1 ثلاثة أنظمة تحكم في ممهدة الصفوف.
يتحكم النظام 1 في كمية الوقود في الخزان الموجود أسفل مقعد السائق (المشغل) في الممهدة. يتكون النظام من جهاز أساسي 1 أ وجهاز ثانوي 1 ب وكائن تحكم (خزان). هذا النظام ضروري للغاية بسبب حالة عدم إمكانية وصول المشغل إلى المنشأة وضمان استمرارية الممهدة. بدون هذا النظام ، يجب على السائق (المشغل) الدخول إلى الخزان بطريقة ما وتحديد إمداد الوقود بأعضاء الرائحة واللمس المرتبط بالتسمم السام ، خطر الحريقوالانفجار.
النظام 1 يعمل مثل هذا. عندما تكون فارغة خزان الوقوديتم إنزال العوامة إلى أسفل ، ويكون شريط التمرير المتغير لمستشعر Rd في الموضع الأقصى الأقصى ومقاومته القصوى. تحققت المعادلة (1):
طريق R1 = R2 R3 (1)
ثم تتساوى إمكانات القمم A و B لدائرة الجسر ، ويظهر الجهاز V1 صفرًا. عند ملء الخزان بالوقود ، يرتفع المستوى ، يتحرك طريق المحرك لأسفل ويحول جزءًا من طريق جهاز استشعار مقاومة متغيرة ، مما يقلل من مقاومته الكلية. نتيجة لهذا ، فإنه يزيد كهرباءمن المصدر حتى R3 ، Rd ، يزداد انخفاض الجهد عبر R3 وفقًا لذلك وتتغير إمكانات الذروة B ، بينما تظل إمكانات الذروة A دون تغيير. نتيجة لذلك ، يوجد فرق محتمل بين القمتين A و B ، والذي يظهر بالمؤشر V1 ، ويكون هذا الاختلاف الأقصى عند امتلاء الخزان. مع انخفاض استهلاك الوقود ، ينخفض الطفو ، يتحرك طريق محرك المستشعر لأعلى ، ويزداد طريق المقاومة ، وينخفض التيار عبر Rd ، R3 وتقترب إمكانات الذروة B من إمكانات الذروة A ، ويتحرك سهم المؤشر V1 إلى الصفر.
يتحكم النظام 2 في زاوية شفرة ممهدة الطرق. يتكون من جهاز أساسي 2 أ وجهاز ثانوي 2 ب. هذا النظام ضروري للغاية ، لأنه بدونه سيتمكن المشغل من تحديد ميل الموقع المخطط بشكل تقريبي للغاية. ومن الممكن هنا حدوث انحرافات كبيرة تؤدي إلى وقوع حوادث سيارات. يعمل النظام 2 بشكل مشابه للنظام الأول ، ويتم تحقيق القراءة الصفرية للمؤشر V2 فقط في الموضع الأوسط لشريط تمرير المستشعر Rd. ثم تحمل المساواة:
(R1 + 0.5Rd) R4 = (R2 + 0.5Rd) R3 (2)
يؤدي تغيير زاوية ميل المخطط بالنسبة إلى الأفقي بمساعدة خط راسيا إلى تحريك شريط التمرير ويغير نسبة الأجزاء 0.5Rd ، منتهكًا المساواة 2 ، مما يتسبب في ظهور فرق محتمل بين القمم A و B و ، وفقًا لذلك ، انحراف سهم المؤشر V2.
يقيس النظام 3 ضغط التشغيل في النظام الهيدروليكي لغرف المكبس (PC). يدفع هذا الضغط شفرة الممهدة على طول المنحدر. النظام 3 هو مقياس ضغط زنبركي تقليدي ، والعنصر الحساس فيه هو زنبرك مجوف أحادي الدورة (نصف حلقة). يتم تطبيق الضغط المقاس داخل الزنبرك ويعمل بشكل موحد على سطحه الداخلي. لأن السطح الخارجينصف الحلقة أكبر من الحلقة الداخلية ، ثم تعمل قوة الضغط المقاس على تقويم الزنبرك. أحد حوافه ثابت بلا حراك ، والثاني يدور المؤشر من خلال وصلة ميكانيكية حتى يتم موازنة الضغط المقاس بالقوة المرنة للزنبرك المجوف.
تضمن الأنظمة الثلاثة مجتمعة أن جهاز التسوية يعمل في الوضع القياسي وفقًا للمعلمات الثلاثة المسماة. يعمل النظام الأول بشكل مستقل عن الثاني والثالث. يعتمد النظام الثاني بشكل غير مباشر على النظام الثالث ، لأنه إذا أعطى النظام الثالث نتيجة أقل من القاعدة ، فإن إمكانية تغيير زاوية ميل الشفرة بسبب حالة الخمول لمحركات الأقراص الهيدروليكية للكمبيوتر الشخصي مستبعدة.
الصورة 1
يتشابه النظامان الأول والثاني في تكوين العناصر الهيكلية. لديهم طريق حساس ريوستاتيكي ، كلاهما يستخدم ما يسمى بدوائر الجسر ويستخدم كلاهما نفس المؤشرات. يحتوي النظام الثالث على عناصر هيكلية مختلفة تمامًا على شكل مجموعة من الروافع والينابيع الميكانيكية. لكن جميع الأنظمة الثلاثة تحتوي على نفس الوحدات الوظيفية النموذجية. تظهر في الشكل 2.
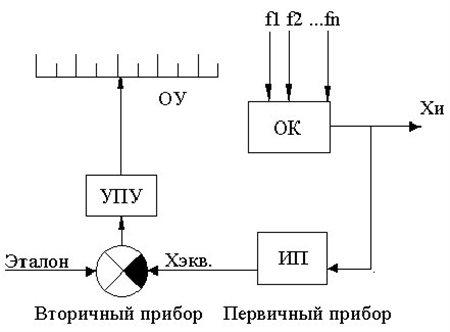
الشكل 2 - رسم تخطيطي لنظام التحكم.
حسنًا - هدف التحكم هو الجهاز (وحدة الإنتاج ، المعدات التكنولوجيةأو عناصرها الهيكلية) التي يتم فيها تنفيذ عملية الإنتاج الخاضعة للرقابة. عملية الإنتاج عبارة عن مجموعة من الإجراءات التي تؤدي إلى تكوين منتج شبه نهائي أو المنتجات النهائية. تتميز عملية الإنتاج بالمعايير القياسية - وهي كميات مادية تضبط نمط عملية الإنتاج. يتم إدراك إحدى هذه القيم بواسطة مستشعر (TS) ، والذي يسمى محول طاقة القياس ، لأنه يدرك التغيير في معلمة الكائن ، ويقيس هذه المعلمة ، ثم يحول الإشارة المستقبلة إلى شكل آخر مناسب للإرسال إلى جهاز ثانوي. محول الطاقة القياس هو أول من يستجيب لتغيير في حالة الكائن ، وبالتالي فإن IP يسمى الجهاز الأساسي. يقبل قيمة معلمة موجودة في أي هذه اللحظةزمن. هذه القيمة تسمى القيمة الحقيقية ويرمز لها تشي. بعد محول الطاقة القياس ، يتم تشكيل إشارة مكافئة لمعامل الكائن (Xeq). لكل معلمة ، هناك IP الخاص به ، والذي له انتقائية ، أي القدرة على تحديد (الشعور) بمعامل واحد فقط من الكائن. هذه المعلمة تسمى الخاضعة للرقابة. لا يتم قياس المعلمات الأخرى التي تؤثر على طريقة تشغيل عنصر التحكم أو كائن الإدارة ويطلق عليها اسم غير متحكم فيه. اعتمادًا على IP المستخدم ، يتم تشكيل الغرض من نظام التحكم واسمه: نظام التحكم في الضغط ؛ نظام التحكم في درجة الحرارة نظام التحكم في المستوى.
على سبيل المثال ، في النظامين 1 و 2 (الشكل 1) ، يدرك طريق المستشعر المتغير حركة العوامة في النظام الأول وحركة خط الشاقول (زاوية الميل) في النظام الثاني. النظام الأول يسمى نظام التحكم في المستوى ، والثاني يسمى نظام التحكم في زاوية الميل. لكن في كلا النظامين ، تؤدي حركة المحرك إلى حدوث تغيير في المقاومة الأومية - وهذه إشارة من نوع مختلف. يمكن نقله إلى الجهاز الثانوي عبر الاتصال السلكي.
في النظام 3 ، يدرك المستشعر (الزنبرك المجوف) الضغط - وهذا هو عمل القوة العمودية لكل وحدة سطح. الزنبرك المجوف غير مجوف بالضغط من الداخل ويعطي حركة الطرف الفضفاض للزنبرك. هذا نوع مختلف من المعلمات ، لكن الإزاحة تتناسب مع قيمة الضغط المقاس ، أي هيكف = تشي.
يتم تغذية الإشارة من خرج MT إلى عنصر المقارنة EC ، والذي يقارن إشارة المستشعر بالمعيار وبالتالي معايرة إشارة المستشعر.
في النظامين 1 و 2 (الشكل 1) ، يكون عنصر المقارنة هو دائرة الجسر. المرجع هو المقاومات R1 ، R2 ، R3 ، R4. وفقًا للمعادلتين (1 و 2) ، يتم تحديد قيمة مقاومة المستشعر باستخدام دائرة جسر.
في النظام 3 ، يكون عنصر المقارنة عبارة عن زنبرك مجوف ذو دورة واحدة. المعيار هو مقدار القوة المرنة لهذا الربيع. تعمل القوة المرنة على موازنة الضغط المقاس وفي لحظة تساويها يصبح الضغط المقاس معروفًا.
في الأجهزة الصناعية ، يتم استخدام العناصر النموذجية كعناصر مقارنة. دوائر القياس: الجسر ، المحولات التفاضلية والتعويض (قياس الجهد).
بعد عنصر المقارنة ، يتم تحديد الإشارة ويجب عرضها على بعض المؤشرات - جهاز قراءة 0U لتقديم المعلومات إلى المشغل. أكثر وسائل القراءة شيوعًا هي الأنظمة التالية: مؤشر المقياس (أداة الإشارة) ، مخطط القلم (جهاز التسجيل الذاتي) ، مؤشرات الإنارة أو المؤشرات الميكانيكية (أداة البيان). ولكن عند خرج ES ، تكون الإشارة منخفضة الطاقة. لا يكفي تحريك السهم على الميزان أو القلم على الرسم التخطيطي ، لذلك يجب تضخيم الإشارة. للقيام بذلك ، بعد ES ، غالبًا ما يتم تضمين جهاز تحويل تضخيم (ACD). في النظامين 1 و 2 (الشكل 1) ، لا تظهر هذه الكتلة.
وبالتالي ، فإن نظام التحكم يحتوي على الوحدات الوظيفية التالية:
كائن التحكم - حسنًا ؛
محول القياس - IP (المستشعر) ؛
عنصر المقارنة - ES ؛
جهاز تحويل تضخيم - UPU ؛
جهاز القراءة - OU.
التأثيرات f1 ... fn على الكائن ، والتي لا تعتمد على نظام المراقبة أو التحكم ، تسمى اضطرابات. هم من نوعين: الحمل والتداخل. يرجع وجود الحمل إلى تشغيل الكائن. من حيث المبدأ ، لا يمكن حماية الكائن من الحمل ، حيث يتم وضعه بواسطة التكنولوجيا نفسها في الكائن. يرتبط التداخل بالجانب ، والظواهر غير المرغوب فيها ، وأي تدابير للتخفيف منها (التدريع) تعمل على تحسين تشغيل الكائن.
من الناحية الهيكلية ، ينقسم نظام التحكم (SC) إلى قسمين: الأجهزة الأولية والثانوية. يقع الجهاز الأساسي دائمًا داخل الكائن أو بالقرب منه. يوجد الجهاز الثانوي عادةً على لوحة تحكم وإدارة خاصة ، لذلك يتم تشكيل مسافة بين الكائن واللوحة ، يتم من خلالها وضع خط اتصال بين الأجهزة الأساسية والثانوية. يدرك الجهاز الأساسي حدوث تغيير في حالة عنصر التحكم والإدارة ، ويعالج الجهاز الثانوي المعلومات الواردة من الجهاز الأساسي ويقدم النتيجة إلى المشغل ، أو ينقل النتيجة إلى أجهزة ثانوية أخرى ، أو وحدات تحكم دقيقة ، أو أجهزة كمبيوتر ، أو إلى دائرة التحكم في الكائن من خلال أجهزة التحكم.
نظام التحكم
تُفهم الإدارة على أنها تنظيم للعملية التي تضمن الطبيعة المحددة للعملية. في هذه الحالة ، تكون العملية نفسها موضوعًا للتحكم ، وتسمى الكميات الفيزيائية المتغيرة التي تميز حالة العملية المتغيرات الخاضعة للرقابة أو يمكن السيطرة عليها (قابل للتعديل) كميات /واحد/. تتم عملية الإنتاج في بعض الأجهزة ، وبالتالي فإن هذا الجهاز مع العملية يسمى موضوع التنظيم. في الواقع ، هذا هو نفس موضوع السيطرة.
إذا كان الكائن يتحكم فيه شخص (مشغل) ، فإن هذا التحكم يعتبر يدويًا. إذا تم التحكم في الكائن دون تدخل بشري ، فإن هذا التحكم يكون تلقائيًا.
يمكن أن يكون التحكم محليًا ، وفي هذه الحالة توجد لوحة التحكم مع معدات التحكم بالقرب من المنشأة وعن بُعد ، حيث يتم تثبيت عناصر الطاقة لنظام التحكم في المنشأة ، وتكون لوحة التحكم على مسافة ما من المنشأة في نقطة ملائمة لإدارة مجمع موقع الإنتاج ، ورشة العمل ، المصنع.
من حيث المبدأ ، يعمل نظام التحكم (CS) على نقل الإجراء التنظيمي للطاقة إلى الكائن الخاضع للتنظيم (OR) من المشغل أو المنظم لتغيير معلمة الكائن وفقًا لقانون معين وإعادته إلى قيمة محددة مسبقًا. في هذا الإتصال هذا النظاملديها في تكوين وحدات الطاقة. يظهر هيكل بناء نظام تحكم في الشكل 3/2 /.
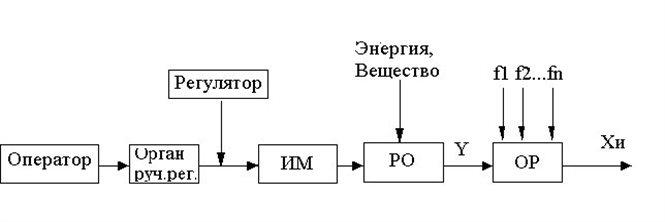
الشكل 3 - الرسم التخطيطي الهيكلي لنظام التحكم (CS)
كائن التحكم، أو التنظيم (OR) ، أو موضوع التحكم (OK) هو ماديًا واحد ونفس الشيء. يمكن تمثيل موضوع التنظيم بواسطة جهاز تقني أو نظام تحكم أبسط. في الحالة الأخيرة ، نتحدث عن بعض أنظمة التحكم الهرمية ، حيث يشتمل نظام التحكم الأكثر تعقيدًا على نظام أبسط أو نظام فرعي يتحكم فيه.
الهيئة التنظيمية (RO) هي جهاز يؤثر بشكل مباشر على تدفق الطاقة أو المواد الموردة للكائن الخاضع للرقابة. يمكن أن يكون هذا الجهاز النموذجي صمامًا ، صمام بوابة ، مخمدًا. يمكن أن تكون وحدات الإنتاج بأكملها أيضًا هيئة تنظيمية: ناقل ، وجرافة ، وجرافة أو شفرة ممهدة وغيرها من هيئات الآليات العاملة. كل هذا يتوقف على الغرض الوظيفي لجهاز معين أو عقدة أو جهاز.
المشغل (IM) هو وحدة طاقة قادرة على خلق قوة لحركة الهيئة التنظيمية. عادة ما يتم استخدام محركات مختلفة هنا: غرف المكبس والغشاء ، والمغناطيسات الكهربائية ، والمحركات الكهربائية ، ومحركات الاحتراق الداخلي ، وما إلى ذلك. المشغل ، الذي يتلقى إجراء تحكم من المشغل أو المنظم ، يحولها إلى تأثير قوة على الهيئة التنظيمية.
إذا شكل المشغل إجراء التحكم (التنظيمي) ، فإن نظام التحكم يسمى يدويًا. إذا تم تشكيل إجراء التحكم بواسطة المنظم ، فإن نظام التحكم يسمى تلقائي. يقوم المنظم بإنشاء إجراء تنظيمي باستخدام عنصر المقارنة أو باستخدام أداة تشكيل خاصة ، وكذلك بمساعدة UPA و IM و RO. يولد المشغل التأثير بمساعدة جسم التحكم اليدوي (ORR) ، والذي يستخدم كمفاتيح ، ومفاتيح ، ومقاومات متغيرة ، وأجهزة اتصال مرحل ، وصمامات ، ومخمدات ، إلخ.
النظام في الشكل 3 قيد التشغيل بالطريقة الآتية. الاضطرابات f1… .fn تغير حالة الكائن الخاضع للرقابة وتتغير القيمة الحقيقية للكمية الخاضعة للرقابة Xi. يحدد العامل حالة الكائن من خلال قيمة Chi ، ويقارن هذه القيمة مع المعطى. نتيجة لذلك ، يحدد المشغل انحراف Xi عن مهمة Xs. وفقًا لحجم الانحراف وعلامة الانحراف ، يوفر المشغل الطاقة أو المادة (Y) للكائن بمساعدة جسم التحكم اليدوي (ORR) وعناصر الطاقة IM ، RO حتى اللحظة Xi = Xs متساوية. وبالتالي ، يعيد المشغل Xi إلى القيمة المحددة بدقة معينة ويطبيع حالة الكائن الخاضع للتنظيم. يحدث هذا التنظيم من خلال وجود إشارة انحراف ويسمى مبدأ انحراف.
نظام التحكم الموضح في الشكل 3 هو حلقة مفتوحة ، لأن التغييرات في القيمة الخاضعة للرقابة Xi لا تنتقل إلى مدخلات النظام ولا تغير من قيمة إجراء التحكم. عادة ما يعطي مثل هذا النظام تحكمًا صارمًا وفقًا لانتظام معين. عادةً ما يتم تنفيذ التنظيم في نظام الحلقة المفتوحة بمشاركة مشغل بشري يطبق إجراءً تنظيميًا باستخدام ORR وفقًا لبرنامج معين ، أو من خلال مراقبة حالة الكائن الخاضع للتنظيم ، يحدد المشغل الإجراء التنظيمي باستخدام ORR ضروري لضمان وضع التشغيل المحدد للكائن المنظم. في هذه الحالة ، يمكن أتمتة خطوات التحكم الفردية.
تُستخدم أنظمة التحكم ذات الحلقة المفتوحة على نطاق واسع في الممارسة العملية لضمان بدء أو إيقاف أو تسلسل تشغيل محركات الطاقة المختلفة للآليات. لقد تم استخدامها على نطاق واسع بشكل خاص مع إدخال المحركات الكهربائية في الصناعة ، والتي تُستخدم لدفع أنظمة نقل التدفق ، وخلاطات الخرسانة ، والكسارات ، وآليات الرفع ، والمضخات ، وآلات المعالجة ، إلخ.
كمثال ، ضع في اعتبارك دائرة لبداية متغيرة لمحرك كهربائي لمضخة قوية لنظام إمداد المياه. إن تيار البدء في المحركات عالية الطاقة مرتفع جدًا لدرجة أنه يمكن أن يتلف ملفات المحرك. بالإضافة إلى ذلك ، يؤدي تيار تدفق كبير إلى حدوث ارتفاعات حالية في شبكة إمداد الطاقة العامة وهذا يؤثر على عمل المستهلكين الآخرين. طاقة كهربائية. لذلك ، للحد من تيار البدء ، يتم إدخال مقاومات إضافية في دائرة حديد التسليح (R1 و R2 في الشكل 4 أ و ب).
في دائرة التحكم اليدوي في الشكل 4 أ ، المفاتيح K1 ، K2 ، K3 هي هيئات تحكم يدوية ، المرحلات الكهرومغناطيسية 1P ، 2P تشكل مشغلًا ، ملامسات التتابع 1P: 1 ، 2P: 1 تشكل هيئة تنظيمية ، المحرك الكهربائي سوف أن تكون موضوعًا للتنظيم. ستكون معلمة التحكم هي تيار البدء للمحرك الكهربائي.
يغلق المشغل أولاً المفتاح K1 ويربط ملفات المحرك (D) بمصدر الطاقة من خلال المقاومة R1 ، R2. التيار المسحوب بواسطة المحرك مقيد بالمقاومات. يبدأ المحرك في الدوران ومع تسارعه ، يتم إحداث المزيد والمزيد من emf العكسي في المحرك الخاص به ، ثم ينخفض التيار المستهلك. ولكن لكي يستمر المحرك في التسارع إلى السرعة المطلوبة ، من الضروري إيقاف تشغيل المقاومة الإضافية R1 و R2 بدورهما.
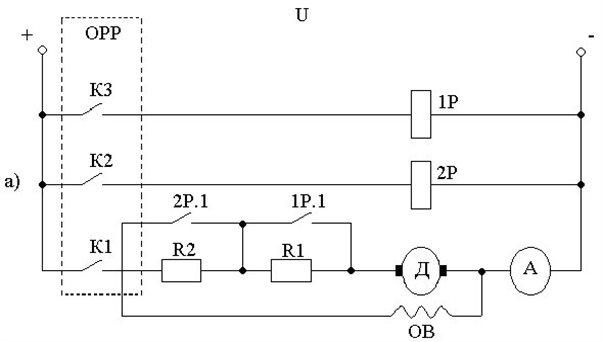
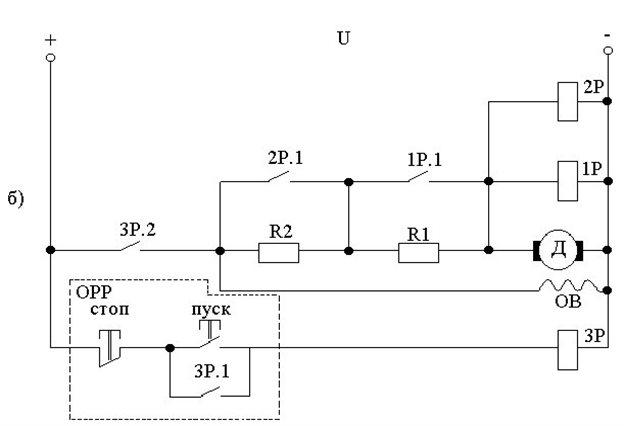
الشكل 4 - أ) رسم تخطيطي لبداية ريوستاتيك يدوي لمحرك كهربائي ، ب) رسم تخطيطي لبدء مقاومة متغيرة أوتوماتيكية لمحرك كهربائي
يلاحظ المشغل الانخفاض في التيار (يحدد الانحراف) بواسطة مقياس التيار الكهربائي (A) إلى حد أدنى معين ، ويغلق المفتاح الثاني K2 ، الذي ينشط مرحل 1P ، ويحول R1 مع اتصاله 1P: 1 ، التيار من خلال الزيادات الحركية والتسارع مستمر. مع زيادة التسارع ، تزداد قوة emf الخلفية مرة أخرى ، وينخفض تيار المحرك ويصل إلى نفس الحد الأدنى ، يغلق المشغل مفتاح K3 ويحول المقاومة الإضافية R2 مع التلامس 2P: 1. تم تشغيل المحرك.
إذا كانت عملية بدء التشغيل تلقائية ، فسيتم توفير عرض أكثر دقة للحظات التحويل للمقاومات المحددة. وفقًا لذلك ، لا يُسمح بالحمل الزائد الحالي للمحرك ، مما يحافظ على عزل اللفات ويزيد من عمر الخدمة.
يوضح الشكل 4 ب دائرة البدء التلقائي. هيئات التحكم اليدوي (ORR) هنا هي أزرار "ابدأ" و "إيقاف". عند الضغط على زر "ابدأ" ، يتم تشغيل التتابع 3P ، ثم يتم إغلاق الاتصال 3P: 2 ويبدأ المحرك في الدوران. مع تسارع المحرك ، يتم إحداث زيادة emf خلفية في المحرك الخاص به ، مما يزيد من الجهد على ملف المحرك ، والذي يتم من خلاله تشغيل المرحلات 1P و 2P. جهد تشغيل مرحل 1P أقل من جهد تشغيل مرحل 2P. لذلك ، يتم تنشيط التتابع 1P أولاً ويحول المقاومة R1 من خلال الاتصال 1P: 1. مع زيادة سرعة الدوران ، يتم تنشيط مرحل 2P ومع اتصاله 2P: 1 يحول المقاومة R2. وبالتالي ، لتنفيذ برنامج بدء التشغيل ، يحتاج المشغل فقط إلى الضغط على زر "ابدأ". جهة الاتصال 3P: يعمل أحد التتابع الثالث على منع زر البدء ، مما يجعل من الممكن إعادة الزر إلى موضعه الأصلي عند تحريره. الضغط على زر "Stop" يوقف المحرك مع إيقاف التشغيل العادي.
مثال آخر. يمكن استخدام المخطط الوارد في الشكل 4 ب للتحكم برمجيًا في نظام نقل التدفق المكون من ثلاثة ناقلات تنقل البضائع بالتتابع إلى بعضها البعض. سيحرك المحرك D الموضح في هذا النظام الناقل الثالث (النهائي). سوف يقوم Relay 1P بتشغيل محرك الناقل الثاني ، ويغذي الحمل إلى الناقل الثالث ، وسيقوم المرحل 2P بتشغيل محرك الناقل الأول ، واستقبال حمل التدفق. سيضمن مثل هذا النظام توريد البضائع للناقلات المتحركة بالفعل ، مما يلغي الحمل الزائد للمحركات عن طريق بدء التيار.
1.3 نظام التحكم الآلي (ACS)
تحكم تلقائىالخامس الحالة العامةيجب أن تضمن أي قوانين للعملية الخاضعة للرقابة وأي طرق تشغيل لعنصر التحكم. لذلك ، يُفهم التحكم الآلي على أنه مجموعة من الإجراءات المختارة من مجموعة متنوعة من الإجراءات الممكنة والتي تهدف إلى تثبيت أو تحسين أداء كائن التحكم. يغطي التحكم الآلي قضايا مثل التكيف أو الضبط الذاتي لنظام التحكم وفقًا للتغييرات في معلمات الكائن أو التأثيرات الخارجية. قضايا تشكيل إجراءات التحكم المثلى واختيار أفضل طرق تشغيل كائن التحكم / 2،3 /. إذا تم تصميم التحكم الآلي لضمان تغيير أو استقرار المتغير الخاضع للرقابة وفقًا لقانون معين ، فإنه يسمى التحكم الآلي. لذلك ، يمكن اعتبار التحكم الآلي نوعًا خاصًا من التحكم الآلي. إنها مجموعة من الأساليب والوسائل التي تضمن قياس حالة كائن التحكم أو الاضطرابات التي تعمل على الكائن والتشكيل اللاحق لتأثير منتظم على كائن التحكم.
لا يمكن توفير أتمتة عملية الإنتاج ، كقاعدة عامة ، على المستوى المناسب دون استخدام مجموعة من أنظمة التحكم الآلي (ACS). لذلك ، على سبيل المثال ، تحتوي وحدة واحدة فقط من آلة بناء الطرق - محرك الاحتراق الداخلي (ICE) على: ACS لمستوى الوقود في غرفة المكربن ؛ توقيت اشتعال ATS ؛ جهد مولد ATS ؛ درجة حرارة ACS لنظام تبريد محرك الاحتراق الداخلي ، إلخ.
لقد أتاح التطور السريع لتكنولوجيا الكمبيوتر ، بما في ذلك المعالجات الدقيقة ، إنشاء ACS استنادًا إلى وحدات التحكم الدقيقة متعددة الوظائف ، والتي يتم إدخالها على نطاق واسع في الإنتاج في الوقت الحالي.
في أبسط الحالات ، فإن ACS عبارة عن مجموعة من الأجهزة التقنية التي توفر التحكم التلقائي. يؤدي هذا النظام واجبات الأنظمة التي تمت مناقشتها أعلاه ، وبالتالي فهو يعتمد على العناصر الهيكلية لهذه الأنظمة.
يظهر الرسم التخطيطي للكتلة الهيكلية لـ ACS في الشكل 5. ويتكون من جزأين رئيسيين: الهدف التكنولوجي للتنظيم (التحكم) (OR) وجهاز التحكم الآلي (AR).
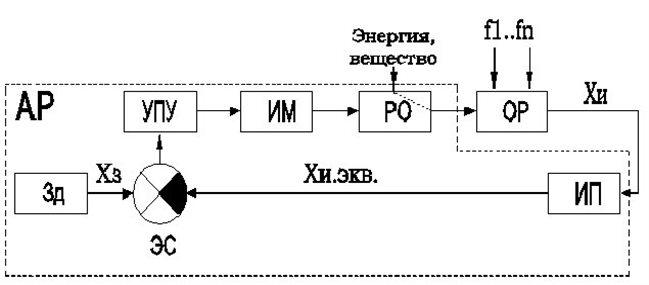
الشكل 5 - الرسم التخطيطي الهيكلي لنظام التحكم الآلي
يشتمل المنظم على العناصر التالية: محول طاقة للقياس (MT) ، عنصر مقارنة (EC) ، رئيسي (Zd) ، جهاز تحويل تضخيم (ACU) ، مشغل (IM) ، هيئة تنظيمية (RO). يتم تمثيل كل عنصر في وحدة تحكم حقيقية بواسطة جهاز مادي واحد أو آخر ، يتم تحديده من خلال خصوصية موضوع التنظيم والتكنولوجيا. قد تكون هذه الأجهزة كهربائية ، وهيدروليكية ، وهوائية ، وإلكترونية ، وما إلى ذلك. بدوره ، يحدد التنفيذ الفني للعناصر خصائص وخصائص خصائص البنادق ذاتية الدفع.
كميات فيزيائية(معلمات الكائن التكنولوجي للتنظيم) التي يدركها محول الطاقة (MT) تسمى قيم الإدخال لوحدة التحكم ، ويسمى العنصر المادي لـ MT نفسه مدخلات وحدة التحكم.
من المنظم التلقائي بمساعدة الهيئة التنظيمية ، يتلقى الكائن إجراء تنظيميًا (U). يطلق عليه قيمة خرج المنظم ، ويسمى العنصر المادي RO إخراج المنظم.
يتكون تشغيل ACS في الشكل 5 من مجموعة من الإجراءات الموضحة أعلاه لنظام التحكم في الشكل 3. ومع ذلك ، يتم استبدال إجراءات المشغل هنا بمنظم تلقائي (AR).
ضع في اعتبارك تشغيل النظام في الشكل 5. لنفترض أنه في الحالة الأولية ، كان للكائن الخاضع للتنظيم معلمات قياسية ، أي كانوا على مستوى المهمة. ثم يعطي محول طاقة القياس ، الذي يدرك القيمة الحقيقية (Xi) لمعلمة الكائن ، إشارة تساوي المرجع (Xs) لعنصر المقارنة. تعطي المساواة Xi = Xz فرقًا يساوي الصفر ، وبالتالي ، على طول سلسلة الكائن ، لا توجد تغييرات في الإجراء التنظيمي. تحافظ ATS على حالة ثابتة. يطلق عليه التوازن أو التوازن. سيستمر هذا إلى ما لا نهاية في غياب الاضطرابات f1… .fn. ومع ذلك ، فإن الاضطرابات تعمل على الكائن طوال الوقت وتنحرف حالة الكائن عن الحالة المعيارية. ثم تنحرف قيمة Xi عن الوظيفة Xs وتظهر إشارة الفرق D X = Xi-Xs عند إخراج عنصر المقارنة. وفقًا لحجم وعلامة هذه الإشارة ، يتم تشكيل إجراء تنظيمي (Y) وتطبيقه على كائن التحكم في شكل طاقة أو تدفق مادة. ثم تدخل ACS في حالة ديناميكية ، وتبدأ عملية التنظيم. تتغير معلمات ACS بمرور الوقت وينتقل النظام من حالة إلى أخرى. هذا الوضع يسمى ديناميكي. يستمر حتى يعود Chi إلى القيمة المحددة بدقة معينة.
يتكون تكوين التأثير (I) ، أولاً ، من تعزيزه بواسطة كتلة UPU ، وثانيًا ، في إنشاء نمط معين من التغيير في هذا التأثير. يتم توفير ذلك من خلال كتل UPU و IM و RO.
النمط المذكور له أهمية أساسية ، لأنه يؤثر على جودة التنظيم. يحدد هذا النمط اسم المنظم (نسبي ، متكامل ، تفاضلي).
على وجه التحديد ، في هذه العملية ، تقوم الهيئة التنظيمية (RO) بتزويد الطاقة أو المادة مباشرة إلى الكائن (OR) ، وفقًا لنمط معين ، ويضمن المشغل (IM) حركة الهيئة التنظيمية.
وبالتالي ، يتم تنفيذ ثلاث إجراءات مرحلية في عملية تشغيل ATS.
أول عمل. الإدراك المستمر للقيمة الحقيقية (تشي) للمتغير المتحكم فيه.
الفصل الثاني. مقارنة إشارة Chi المستلمة بالمعيار أو بالمهمة (Zd) وعزل إشارة الانحراف.
الفصل الثالث. من حيث حجم وعلامة إشارة الانحراف ، يتم تشكيل الإجراء التنظيمي المقابل للانحراف (U) وتزويد هذا التأثير بجسم التحكم حتى يتم تعويض الانحراف بدقة معينة.
1.4 مبادئ وقوانين التنظيم
يحدد مبدأ التنظيم طريقة تشكيل تأثير التحكم (التنظيمي) في البنادق ذاتية الدفع.
ويترتب على مبدأ تشغيل النظام في الشكل 5 أن وجود انحراف يتسبب في عملية التنظيم ، والتي تنتهي بعد انخفاض الانحراف إلى قيمة مقبولة. أي أن وجود انحراف يؤدي إلى تشكيل إجراء تحكم ، وبالتالي يسمى هذا التنظيم مبدأ التنظيم عن طريق الانحراف.
تم تصميم أنظمة التحكم الآلي الحديثة على أساس المبادئ الثلاثة التالية:
تنظيم الانحراف
تنظيم الاضطرابات
التنظيم المشترك.
لكل مبدأ مزاياه وعيوبه ، والتي تؤثر بشكل كبير على جودة التنظيم. لذلك ، يتم تحديد استخدام مبدأ أو آخر من خلال الشروط المحددة لعملية الإنتاج ، والتي يتم التحكم فيها بواسطة CAP.
دعونا نحلل ميزات كل مبدأ تنظيمي.
عندما تنظم بالانحرافينشأ إجراء التحكم نتيجة لانحراف المتغير المتحكم فيه عن القيمة المحددة ، ولتحديد الانحراف ، يتم نقل المتغير المتحكم به إلى مدخلات النظام من خلال دائرة التغذية الراجعة. يحدث الانحراف مع أي اضطرابات في الكائن ، لذلك يأخذ التحكم في الانحراف في الاعتبار جميع الاضطرابات ويعمل مع أي اضطرابات. هذه هي ميزة مبدأ التحكم في الانحراف.
ولكن هذا هو بالضبط سبب ظهور عيب كبير في مبدأ التنظيم عن طريق الانحراف. الحقيقة هي أن الانحراف ACS يسمح أولاً بالانحراف ، ثم يعوض عنه. ثم ، مع الاستلام المتكرر للاضطرابات بشأن موضوع التنظيم ، يزداد الوقت الإجمالي لوجود الانحراف ، وبالتالي ، انتهاك التكنولوجيا في الكائن. جودة التنظيم آخذ في التدهور.
ومع ذلك ، فإن ضمان عملية التنظيم في ظل أي اضطرابات يعطي عالمية مبدأ التنظيم عن طريق الانحراف ويستخدم على نطاق واسع.
عندما تنظم بدافع السخطينشأ الإجراء التنظيمي من ظهور الاضطراب نفسه على موضوع التنظيم ، وحتى قبل ظهور الانحراف ، فإن الإجراء التنظيمي يعوض عن تأثير الاضطراب الذي يدخل الكائن. اتضح أن التأثير التنظيمي للجهة التنظيمية يعوض الانحراف المتوقع.
لتنفيذ التنظيم عن طريق الاضطراب في الرسم التخطيطي (الشكل 5) ، من الضروري فصل محول طاقة القياس (MT) عن الكائن وتثبيته في المكان الذي يحدث فيه الاضطراب. بعد ذلك ، سيقيس المنظم هذا الاضطراب ، ووفقًا لحجمه ، سيزود الجسم بتدفق من الطاقة أو المادة (Y) ، مساويًا تمامًا للاضطراب وموجهًا عكس الاضطراب. نتيجة لذلك ، يتم الاحتفاظ بحالة الكائن دون تغيير. لا يحدث الانحراف عند أي تواتر للاضطراب الذي يصل إلى الجسم ، ولكن يحدث فقط للانحراف الذي يمتلك المنظم حساسًا له. هذا يحسن دقة التحكم ويسلط الضوء على ميزة مبدأ التحكم هذا.
ومع ذلك ، لا تقوم ACS بتحليل حالة الكائن الخاضع للرقابة عن طريق الاضطراب ، لأنه لا يحتوي على عنصر حساس لهذا الغرض. تبدأ عملية التنظيم فقط عند ظهور الاضطراب ، الذي تم تكوين ACS لقياسه (عن طريق تثبيت المستشعر المناسب). وبالتالي ، لن تتم معالجة الاضطرابات الواردة الأخرى بواسطة النظام. سوف يتسببون في انحراف حالة الكائن عن الحالة المعيارية وسيتم كسر التكنولوجيا الموجودة في الكائن. هذا عيب كبير في مبدأ التحكم في الاضطرابات. علاوة على ذلك ، من المستحيل مراعاة جميع الاضطرابات. لذلك ، هناك دائمًا احتمال لانحراف معلمات الكائن الخاضع للرقابة بفعل الاضطرابات غير المحسوبة. في هذا الصدد ، يتم استخدام التحكم في الاضطرابات بشكل محدود للغاية وفقط في الحالات التي يمكن فيها تمييز أحد أقوى الاضطرابات ، ويمكن إهمال الباقي أو عزله عن الكائن.
في الأنظمة التنظيم المشتركيتم استخدام كلا المبدأين - التنظيم عن طريق الانحراف والاضطراب. تجمع هذه ATS بين مزايا مبدئي التنظيم المذكورين أعلاه. لكن هيكلها أكثر تعقيدًا.
للحصول على تحكم مشترك في الدائرة الموضحة في الشكل 5 ، يجب تركيب محولي طاقة قياس. قم بتثبيت محول طاقة واحد في كائن التحكم لقياس القيمة الخاضعة للرقابة Xi ، ويجب تثبيت محول طاقة القياس الآخر في المكان الذي يحدث فيه الاضطراب. ثم يقوم المنظم بتشكيل الإجراء التنظيمي على إشارتين وتنفيذ كلا مبدئي التنظيم.
يمكن أيضًا تنفيذ مبادئ التنظيم في نظام التحكم اليدوي بواسطة مشغل بشري وفقًا للمخطط في الشكل 3.
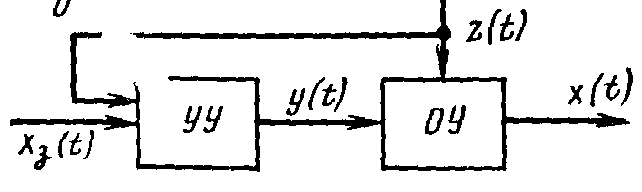
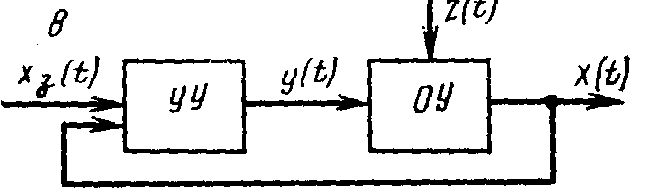
دعنا نوضح بمثالين للتحكم في مستوى السائل في الخزان وفقًا لمبدأ الاضطراب (الشكل 6 أ) والانحراف (الشكل 6 ب).
سيكون موضوع التحكم هنا عبارة عن خزان به سائل. لنفترض أن هذه هي الغرفة العائمة للمكربن لمحرك الاحتراق الداخلي (ICE).
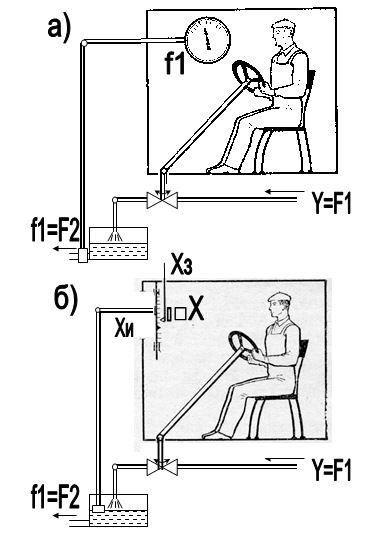
الشكل 6
العامل الرئيسي المربك للجسم هو استهلاك الوقود (F2) من الغرفة بواسطة المحرك. ستكون القيمة الخاضعة للرقابة هي مستوى الوقود في الغرفة. سيكون إجراء التحكم هو تدفق الوقود (Y = F 1) إلى الغرفة.
عند التنظيم عن طريق الاضطراب (الشكل 6 أ) ، لا يتلقى المشغل معلومات حول مستوى السائل الذي يهمه ، ولكنه يعرف من الأداة حول استهلاك الوقود F2 ويعتمد على تغيير المستوى على التدفق. بقياس استهلاك الوقود F2 ، يحسب المشغل الموضع المطلوب للصمام وفقًا للاعتماد المذكور ويضبط الفتح المقابل للصمام الذي يوفر التدفق (Y = F1) للسائل الذي يساوي معدل التدفق (F2 = f1) . نتيجة لذلك ، لا ينحرف مستوى الوقود في غرفة الطفو ويظل عند القيمة القياسية.
تم تكوين نظام التحكم هذا لإزعاج واحد فقط - استهلاك الوقود F2. يتم ضمان ذلك من خلال تركيب نظام تحكم (مقياس التدفق).
إذا ظهر اضطراب آخر ، على سبيل المثال ، تم فك قابس تصريف حجرة الطفو بسبب الاهتزازات ، فسيظهر اضطراب ثانٍ إضافي f2 - استهلاك الوقود F3. المشغل ليس لديه معلومات حول هذا ، المصاريف الثانية F3 ، ولا يصدر أي تأثير تنظيمي على الكائن. سينخفض مستوى الوقود في الغرفة ، وسيظهر انحراف عن القيمة الخاضعة للرقابة ، o
التي لا يعرفها المشغل أيضًا ، وستظل التكنولوجيا في المنشأة معطلة.
عند الضبط عن طريق الانحراف (الشكل 6 ب) ، يتلقى المشغل معلومات حول مستوى الوقود (تشي). لهذا ، يتم تثبيت نظام التحكم في المستوى (مقياس المستوى). من خلال مراقبة تغيير المستوى ، يحدد المشغل انحراف مستوى DX عن القاعدة ، واعتمادًا على حجم الانحراف وعلامة الانحراف ، يغير موضع الصمام الذي ينظم تدفق الوقود (F1) إلى الغرفة. نتيجة لذلك ، يتم استعادة مستوى الوقود في الحجرة إلى قيمة محددة مسبقًا.
مع التنظيم المشترك ، يتلقى المشغل المعلومات من جهازين: من مقياس التدفق ومقياس المستوى. يغير موضع الصمام بناءً على إشارتين: تدفق F2 ومستوى الطاقة. إذا تلقى الكائن اضطرابًا f1 = F2 ، فحينئذٍ يحرك المشغل الصمام وفقًا للتغيير في هذا الاضطراب. إذا حدثت اضطرابات أخرى في الكائن ، فلن يعرف المشغل أي شيء عنها ، لأنه ليس لديه أدوات لذلك. ثم ستسبب هذه الاضطرابات انحرافًا عن المستوى Xi ، ووفقًا لحجم انحراف المستوى ، يغير المشغل موضع الصمام ، ويعيد المستوى إلى الوضع الطبيعي.
في أنظمة التحكم الآلي ، إجراء التحكميمكن أن تختلف (Y) وفقًا للأنماط المختلفة التي تؤثر على جودة العملية التنظيمية. في هذا الصدد ، من المهم معرفة هذه الأنماط. بالنسبة لمنظم معين ، فإن هذا النمط مؤكد. يتم تحديده من خلال العلاقة الوظيفية بين قيم المدخلات والمخرجات لوحدة التحكم ويسمى قانون التنظيم.
إذا قمنا بتعيين انحراف القيمة المضبوطة عن القيمة المحددة DX , والتغيير في العمل المضطرب من خلال د F،ثم يمكن تمثيل مجموعة قوانين الرقابة الممكنة لمبادئ الرقابة المذكورة أعلاه بشكل عام على النحو التالي:
يعد تعريف قانون تنظيم أو آخر هو أهم مهمة يجب حلها في تطوير المنشطات الأمفيتامينية. التطبيق الفني لبعض القوانين التنظيمية مقيد بخصائص العناصر الفنية التي تشكل المنظم. أدناه سننظر في القوانين الرئيسية للتنظيم وأنواع المنشطات الأمفيتامينية والهيئات التنظيمية.
1.5 أنواع مختلفة من أنظمة التحكم الآلي
لا تسمح مجموعة متنوعة من ATS الحديثة بتحديد تصنيفها الذي لا لبس فيه ، منذ الأنظمة أنواع مختلفةلها خصائصها الوظيفية الخاصة. ومع ذلك ، فإن ارتباط CAP في مجموعات التصنيف ضروري لتسهيل دراستهم وتقليل حجم المادة المدروسة.
ضع في اعتبارك الأنواع الرئيسية من المنشطات الأمفيتامينية.
تنقسم أنظمة التحكم إلى مغلقو افتح.
في الأنظمة المغلقةيتشكل التأثير التنظيمي بالاعتماد المباشر على القيمة المنظمة للكائن الخاضع للتنظيم.
نظام التحكم الموضح في الشكل 5 مغلق. ستتضمن السلسلة الرئيسية (المباشرة) للتأثيرات التي تنتقل إلى إخراج وحدة التحكم (إلى الكائن) ودائرة التغذية الراجعة من الكائن إلى إدخال وحدة التحكم (المستشعر) ، والتي تسمى التعليقات الرئيسية. يتم اختيار وإنشاء السلسلة الرئيسية للتأثيرات وفقًا للغرض الرئيسي للنظام. تتكون هذه السلسلة من العناصر: UPU ، IM ، RO. إنه يعمل على إحداث تأثير منتظم على موضوع التنظيم من أجل الوصول إلى معاييره إلى قيمة معينة. من خلال دائرة التغذية الراجعة ، يتم تقديم المعلومات من الكائن المنظم إلى وحدة التحكم ، أي العودة إلى السلسلة الرئيسية. تتكون السلسلة العكسية من العناصر: IP ، ES ، Zd. يوفر معلومات حول نتائج تأثير المنظم على الكائن. من خلال هذه الدائرة ، يتحكم المنظم ويصحح تأثيره على الكائن. . نظرًا للدائرة الرئيسية ودائرة التغذية الراجعة ، تولد وحدة التحكم إجراءات التحكم هذه التي تميل إلى تقليل عدم التطابق بين Chi و Xs. نتيجة لذلك ، يتم إغلاق سلسلة انتقال التأثير من المنظم إلى الكائن ، ثم العودة إلى المنظم ، في حلقة.
تسمى أنظمة الحلقة المغلقة أنظمة التغذية الراجعة أو أنظمة التحكم في الانحراف. بسبب انغلاق سلسلة نقل التأثيرات ، تنشأ الظروف للحفاظ تلقائيًا على القيمة الخاضعة للرقابة Xi عند مستوى معين Xs. بالإضافة إلى التعليقات الرئيسية التي تغلق النظام بأكمله في حلقة ، هناك ردود فعل محلية تغطي فقط جزء من العناصر الهيكلية. أنها تعمل على تصحيح خصائص ATS.
الدائرة المغلقة للنظام ، من حيث المبدأ ، ليس لها مدخلات ومخرجات ، ولكن من أجل دراسة خصائص النظام ، يتم كسرها ويتم تمييز المدخلات والمخرجات المذكورة أعلاه بشكل تقليدي. يتم إجراء الفاصل بسهولة عن طريق فصل محول طاقة القياس عن موضوع التنظيم.
في الأنظمة المفتوحةيتم تعيين متغير التحكم دون مراعاة القيمة الحقيقية للمتغير المتحكم فيه. يتم تشكيلها على أساس هدف التحكم وخصائص الكائن والتأثيرات المزعجة المعروفة.
في أنظمة التحكم ذات الحلقة المفتوحة ، لا توجد استجابة من النظام للاضطرابات غير المنضبطة ، حيث لا تؤخذ حالة الكائن في الاعتبار.
يمكن أن يكون النظام الموضح في الشكل 5 مثالًا على نظام التحكم في الحلقة المفتوحة ، إذا تم فصل محول طاقة القياس عن الكائن الخاضع للتنظيم وتم تثبيته في المكان الذي يحدث فيه الاضطراب. في هذه الحالة ، يمكن استبدال المستشعر بآخر مقبول للاضطراب المتوقع. ثم ستحدد وحدة التحكم حجم الاضطراب. وفقًا لهذه القيمة ، سيتم تطبيق إجراء تنظيمي على الكائن يساوي الاضطراب ، لكن وحدة التحكم لن تتلقى استجابة من الكائن ، نظرًا لأن وحدة التحكم لن تحتوي على عنصر IP حساس في الكائن. نقلناه إلى مكان السخط. لا توجد حلقة من سلسلة مغلقة لانتقال التأثيرات.
هنا تتحقق السيطرة من خلال اضطراب معروف.
وفقًا لانتظام الوصف الرياضي لنظام التحكم ، يتم تقسيمهم إلى خطي وغير خطي.
بالنسبة للوصف الرياضي للاعتماد (3) ، تُستخدم المعادلات التفاضلية عادةً. النظام الموصوف المعادلات الخطيةأي طلب يسمى خطي.في الأنظمة الخطية ، يتم تحقيق مبدأ التراكب ، والذي يتكون من حقيقة أن رد فعل النظام على مجموع التأثيرات الخارجية يساوي مجموع ردود الفعل على كل من هذه التأثيرات. نتيجة لذلك ، تم تبسيط تحليل الاعتماد (3).
إذا كان النظام يحتوي على عنصر واحد على الأقل موصوف بواسطة معادلة غير خطية ، فسيتم استدعاؤه غير خطي.يحاولون عدم استخدام الأنظمة غير الخطية ، فهم خطيون بواسطة عناصر التصحيح.
حسب العدد تعليقتنقسم ATS إلى واحد ومتعدد الطبقات.
في نظرية التحكم الآلي ، تسمى السلسلة المغلقة لنقل التأثيرات حلقة التحكم. في النظام الموضح في الشكل 5 ، توجد دائرة واحدة فقط ، لذا فإن هذا النظام عبارة عن دائرة مفردة. إنه يعمل على معلمة تحكم واحدة ويعطي إجراء تحكم على أحد المخرجات. هناك أيضًا أنظمة متعددة الدوائر يوجد فيها أكثر من دائرة عمل مغلقة واحدة. تتكون هذه الأنظمة من عنصر تحكم واحد وواحد أو أكثر من وحدات التحكم الأوتوماتيكية. لكن الشيء الرئيسي هو أن هذا النظام يمد الكائن بتأثيرات تنظيمية من خلال عدة قنوات تشكل حلقات مغلقة. للحصول على نظام متعدد الحلقات في الشكل 5 ، من الضروري توصيل مشغل واحد آخر على الأقل (IM) وهيئة تنظيمية (RO) بإخراج وحدة التحكم ، والتي سيتم توصيلها بالتوازي مع تلك الموضحة بالفعل.
مثال على نظام التحكم متعدد الحلقات هو وحدة التحكم في سرعة الطرد المركزي لمحرك الاحتراق الداخلي. عندما تنخفض سرعة المحرك ، يفتح المنظم المثبط المكربن ، ويزيد من تدفق الخليط القابل للاحتراق ويمنع انخفاض السرعة - وهذا إجراء تحكم واحد لحلقة التحكم الأولى. بالتزامن مع فتح المثبط ، يقوم نفس المنظم بتشغيل المضخة - المسرع ، مما يزيد من إمداد البنزين إلى الخليط القابل للاحتراق - وهذا هو إجراء التحكم الثاني في الدائرة الثانية.
تعد الأنظمة متعددة الحلقات أكثر تعقيدًا في التصميم ، ولكنها في بعض الأحيان ضرورية للغاية ، لأنها توفر تحكمًا متزامنًا في العديد من معلمات الكائن المنظم وتحافظ على النسبة المثلى بين هذه المعلمات. تم تحسين كفاءة التنظيم.
وفقًا لقانون تغيير القيمة المنظمة ، يمكن للمرء أن يفردها:
استقرار CAP
برنامج CAP ؛
متابع CAP.
الخامس الممارسة الصناعيةفي أغلب الأحيان ، يتم استخدام التحكم الآلي للحفاظ على معلمة كائن عند قيمة معينة. اتضح أنه في هذه الحالة ، تحتفظ ACS (تستقر) معلمة الكائن عند مستوى معين. يسمى هذا النظام استقرار.يفي بأي انحرافات ناشئة عن القيمة المنظمة عن القيمة المحددة.
في مثل هذا النظام ، يتم تعيين قيمة ثابتة للمتغير المتحكم فيه باستخدام أداة الضبط (Zd) ، مما يجعل من الممكن تغيير قيمة معلمة التحكم وفقًا للظروف التكنولوجية للعملية الخاضعة للرقابة. توفر كل وحدة تحكم تلقائية تحديد المهمة من قبل المشغل باستخدام نقطة الضبط (Zd).
أمثلة على أنظمة التثبيت في آلات إنشاء الطرق (SDM) هي: نظام التحكم في مستوى الوقود في غرفة عوامة المكربن ICE ، ونظام التحكم في جهد الشبكة SDM على متن الطائرة ، ونظام التحكم في درجة الحرارة ICE (ترموستات) ، إلخ.
ومع ذلك ، في الممارسة العملية ، هناك أيضًا كائنات يكون من الضروري فيها تغيير القيمة الخاضعة للرقابة وفقًا لقانون محدد مسبقًا (برنامج) ، غالبًا كدالة للوقت ، وفي كثير من الأحيان - معلمة نظام أخرى. تُستخدم هذه الأنظمة للتحكم في العمليات ، والتي تُعرف طبيعتها مسبقًا. انهم يسمى البرمجيات.
لتنفيذ التحكم في البرنامج ، عادةً ما يتم استخدام إعداد وحدة تحكم متغيرة ، والتي تتأثر باستمرار بحيث تتغير القيمة الخاضعة للرقابة وفقًا لقانون محدد مسبقًا. للقيام بذلك ، يتم توفير إعداد وحدة التحكم مع عنصر برنامج خاص يقوم تلقائيًا بتغيير إعداد (إعداد) النظام وفقًا للقانون المطلوب.
مثال على نظام التحكم الآلي في البرنامج هو مخطط التحكم في درجة الحرارة لفرن للمعالجة الحرارية لأجزاء SDM (الشكل 7).
يتم تحديد الانتظام المطلوب للتغيير في درجة حرارة الفرن مع مرور الوقت من خلال ملف تعريف مخطط المبرمج. يتم تحريك الرسم البياني من اليسار إلى اليمين بواسطة آلية الساعة (1). تتدحرج الأسطوانة على طول ملف الرسم التخطيطي ، والذي يحرك القضيب (2) وفقًا للملف الشخصي ويدير الرافعة (3) بملامسات K1 و K2 حول دعمها. يتم توصيل جهة الاتصال الوسطى المتحركة ميكانيكياً بمؤشر مقياس الحرارة وتتحرك مع المؤشر. يلاحظ انخفاض درجة حرارة الفرن بواسطة المزدوج الحراري TP وينقل إشارة إلى الجهاز الثانوي لمقياس الحرارة ، الذي يتحرك سهمه إلى اليسار ويغلق جهة الاتصال K1. يقوم هذا التلامس بتشغيل المشغل Dv لفتح الصمام لتزويد الفرن بالوقود. زيادة إمداد الوقود
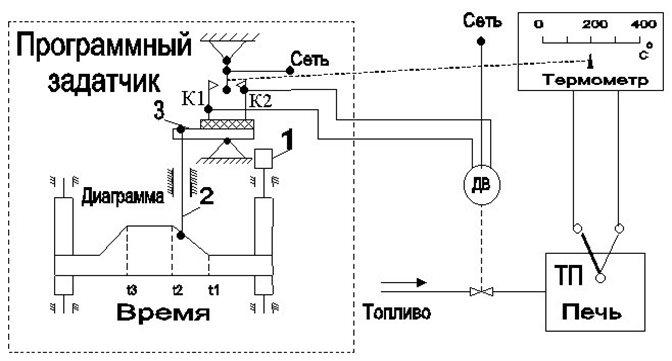
الشكل 7 - نظام التحكم الآلي في درجة حرارة الفرن
درجة الحرارة ، ثم يتحرك سهم مقياس الحرارة إلى اليمين ويغلق جهة الاتصال K2 ، والتي تقوم بتشغيل المشغل Dv للإغلاق. ينخفض إمداد الوقود وتتوقف درجة الحرارة عن الارتفاع. خلال هذه العملية ، يدور ذراع التلامس (3) حول نقطة ارتكازه وفقًا لملف تعريف الرسم التخطيطي ، وبالتالي يضمن لحظة تبديل جهات الاتصال K1 و K2 وفقًا للرسم التخطيطي الموجود انقسامات مختلفةموازين الحرارة. أي ، يتم تغيير نقطة ضبط درجة الحرارة التي سيتم عندها التحكم في إمداد الوقود.
إذا قمت بإزالة عنصر البرنامج (الرسم التخطيطي) وقمت بإصلاح الرافعة (3) في موضع معين ، فسيحدد هذا الوضع قيمة درجة حرارة واحدة ، بالنسبة إلى إجراء التحكم الذي سيتم تشكيله وسيتم اختناق إمداد الوقود. بدقة معينة ، سيتم الحفاظ على قيمة درجة حرارة محددة وسيستقر النظام.
في المثال المدروس ، سيكون الفرن موضوعًا للتنظيم. ستكون جميع عناصر الدائرة الأخرى عبارة عن وحدة تحكم برمجية:
المزدوجة الحرارية TP - قياس محول الطاقة ؛
الجهاز الثانوي لمقياس الحرارة هو عنصر مقارنة ؛
الرافعة (3) بجهاز اتصال - عنصر التحويل الخاص بـ UPU ، المعروف أيضًا باسم جهاز الضبط ؛
المحرك الكهربائي هو آلية تشغيل.
صمام - هيئة تنظيمية ؛
قيمة قابلة للتعديل - درجة الحرارة ؛
إجراء التحكم هو إمداد الفرن بالوقود.
هناك أيضًا أنظمة تحكم تلقائية في البرنامج تتغير فيها القيمة المحددة لمولد البرنامج اعتمادًا على بعض القيم الأخرى. اتضح أن نظام التحكم في البرنامج يراقب التغيير في هذه القيمة الأخرى. تسمى هذه الأنظمة متابع.
حسب القدرة على التكيف ACS لظروف ديناميات عملية التنظيم ، أي القدرة على تغيير قانون التنظيم ومعلمات المنظم تلقائيًا اعتمادًا على التغيير في معلمات تقنية عملية الإنتاج المنظمة ، يتم تقسيم الأنظمة في التكيف والعادية.
نظرًا للديناميكية العالية وعابرة الإنتاج الحديث ، أصبحت الأنظمة التكيفية شائعة بشكل متزايد. هناك حالة خاصة من الأنظمة التكيفية هي الأنظمة المثلى ، والغرض منها هو العثور على الوضع الأمثل لتشغيل كائن التحكم والحفاظ عليه ، فضلاً عن تكوين نظام بهيكل متغير.
الأنظمة المذكورة أعلاه عادية. تعد الأنظمة التكيفية أكثر تعقيدًا في التصميم وأكثر تنوعًا في الوظائف.
الأنظمة التكيفية تحل مشكلتين رئيسيتين.
المهمة الأولى هي الحفاظ على الحد الأقصى للقيمة الخاضعة للرقابة. التحدي الثاني هو الحفاظ عليها الأداء الأمثل ATS حسب شروط استيفاء مؤشرات جودة التنظيم.
أصبح انتقال الأنظمة التكيفية إلى مستوى جديد نوعيًا ممكنًا بسبب الاستخدام الواسع النطاق لأدوات المعالجات الدقيقة في التحكم في العمليات ، وكذلك بسبب تطوير محولات التطبيع التي تسمح بتنسيق تشغيل منظم واحد مع الأجهزة الطرفية المختلفة: أجهزة استشعار مختلفة القيم ومحركات الطاقات المختلفة ومنافذ الإدخال والإخراج للمعلومات وما إلى ذلك.
على سبيل المثال ، يتم استخدامه على نطاق واسع في الصناعة نظام المعالجات الدقيقة "Remikont"، مصمم للتحكم في العمليات التكنولوجية التي يكون من الضروري فيها حل مهام التحكم في تشغيل وإيقاف قنوات التحكم الفردية ، والتغيير التلقائي للإعدادات مع تكييف نظام التحكم مع الديناميكيات المتغيرة العملية التكنولوجية.
يتضمن Remikont R-110 ثلاث مجموعات من الوحدات: كمبيوتر معالج دقيق (MC) ، ووحدات للتواصل مع كائن ، ووحدات للتواصل مع عامل (الشكل 8).
تتضمن بنية كمبيوتر المعالج الدقيق: معالج التحكم ، وذاكرة القراءة فقط (ROM) ، وذاكرة الوصول العشوائي (RAM).
كل شئ البرمجياتوحدة التحكم "مضمنة" في ذاكرة القراءة فقط وتحتوي على:
برنامج التحكم (المراقبة) ؛
برامج خوارزميات التحكم المختلفة ؛
برامج الصيانة للمشغل والأجهزة الخارجية ؛
برنامج التشخيص الذاتي.
تشمل وحدات الاتصال (MC) مع الكائن: محول تناظري إلى رقمي ومن رقمي إلى تناظري ، ومحول منفصل إلى رقمي ، ومحول نبض رقمي ، وفواصل كلفانية.
تأتي إشارات الإدخال عبر جهاز الإدخال إلى معالج التحكم (CP) ، والذي يستدعي خوارزمية التحكم المناسبة من المكتبة ويصدر إشارات التحكم إلى عناصر التحكم من خلال جهاز الإخراج. تتيح لك وحدة التحكم P-110 التحكم في قنوات متعددة من خلال إيقاف التشغيل وتشغيل قنوات التحكم الفردية ، فضلاً عن التغيير التلقائي للإعدادات وتكييف نظام التحكم مع ديناميكيات عملية الإنتاج المتغيرة.
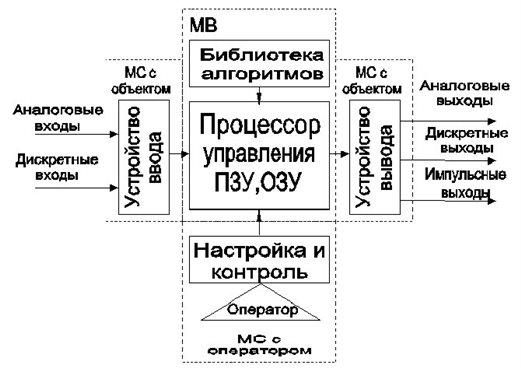
الشكل 8 - رسم تخطيطي هيكلي لوحدة تحكم المعالج الدقيق
ريميكونت R-110
ل الإعداد اليدويجهاز التحكم والتحكم في تشغيل نظام التحكم هناك وحدة تحكم المشغل.
يتم تشكيل إشارات التحكم إلى الكائن بواسطة وحدة التحكم ، والتي تؤدي وظائف مختلفة لتنظيم ومعالجة الإشارات القادمة من الكائن. في الوقت نفسه ، يتم إجراء ستة أنواع من التحولات الوظيفية:
تنفيذ قانون التحكم النسبي-المتكامل-التفاضلي للإشارات التناظرية وإشارات الدخل النبضي ؛
التحولات الديناميكية وغير الخطية ؛
إجراء العمليات الحسابية وتطوير الإجراءات التنظيمية.
يمكن إنشاء إشارات تحكم تناظرية وإشارتين منفصلتين عند خرج جهاز التحكم.
في الوقت الحاضر ، يتم إدخال المتحكمات الدقيقة Simatic ، Adam ، الأكثر تقدمًا من حيث الوظيفة ، في الإنتاج. لديهم سرعة عالية ، والقدرة على خدمة حوالي مائتي كائن في وقت واحد ، ولديهم إشارات خرج قوية يمكنها التحكم الآليات التنفيذيةبدون معدات بدء إضافية.
تختلف أنظمة التهوية وتكييف الهواء وهم يعرفون أنه يمكن الجمع بينهما ، وعادة لا يتذكرون أي شركة في سانت بطرسبرغ تقوم بتركيب مثل هذه الأنظمة. عند تركيب أنظمة التهوية والتكييف في المنظمات فإن العامل الأكثر أهمية في اختيار المقاول هو جودة العمل والاحتراف. وإذا تم الكشف عن الاحتراف في سياق محادثات العملاء ...
اتجاه الرياح وسرعتها) ، بالإضافة إلى الضغط الصغير المتاح ، لا يسمحان بحل جميع المهام المعقدة والمتنوعة في مجال التهوية بمساعدتهم. تصنيف أنظمة التهوية الميكانيكية. التهوية الميكانيكية. تهوية طبيعيةاعتمادًا على درجة الحرارة الخارجية وسرعة الرياح ، لا يمكن دائمًا توفير تبادل الهواء المطلوب. لذلك عند الحاجة ...
تمكنا من حل التناقض ، ولكن من الواضح أيضًا أن المزيد من الوقت سيمضي ، وسيتعين علينا مرة أخرى التحدث عن الحاجة إلى زيادة سرعة نظام الذاكرة الفرعي. لذا ، فإن عملية تطوير أنظمة الكمبيوتر هي حل التناقضات ، مع مراعاة نطاق المشاكل وقائمة التناقضات التي يجب حلها. 2.8 حلول الأجهزة والبرامج كما تعلم ، يمكن حل العديد من المشكلات ...
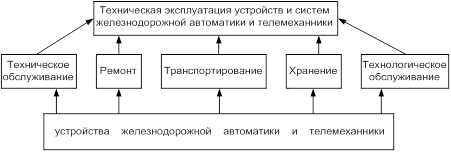
بناءً على طلب رئيس أو مرسل مسافة الإشارة والاتصال ، يعطي أمرًا لسائق القاطرة بإيقاف القطار من أجل توصيل الموظفين بمسافة الإشارة والاتصال من وإلى مكان العمل ، متجهًا إلى القضاء على بالفشل. الإجراء الخاص بإنتاج العمل الذي يجب تنفيذه متى فنى تشغيلأجهزة وأنظمة ZHAT ، بما في ذلك عند التخلص من إخفاقاتها ، للامتثال ...
الوكالة الاتحادية للتعليم
ولاية مؤسسة تعليمية
أعلى فائق التعليم المهني
"المحيط الهادئ جامعة الدولة»
أساسيات التحكم الآلي
دورات قصيرةمحاضرات لطلبة التخصصات الهندسية والفنية بقسم المراسلات
خاباروفسك
قسم A&S PNU
محاضرة تمهيدية
1. موضوع الدورة
1.1 الغرض ، والملاءمة ، والدور الحالي من TAU.
نظرية دراسات التحكم الآلي مبادئ عامةبناء الأنظمة الآلية وطرق دراستها بغض النظر عن الطبيعة الفيزيائية للعمليات التي تحدث فيها. TAU هو الأساس النظري للأنظمة الآلية في مختلف مجالات التكنولوجيا. يوفر الأساس النظري الأساسي لدراسة وتصميم أي تلقائي و أنظمة مؤتمتةفي كافة مجالات التقنية والاقتصاد الوطني. تدرس TAU عمليات التحكم ومهام إنشاء أي أنظمة مع التغذية الراجعة.في القرن العشرين ، في ظل ظروف الثورات التقنية والإعلامية ، حرر الناس من أداء المهام الروتينية. أنواع العمالة الرتيبة والثقيلة ، أي إنتاج مشبع بوسائل الميكنة والأتمتة. لذلك ، في عملية العمل ، يجب على المهندس من أي تخصص أن يشارك في تصميم أو حساب أو دراسة نظام التحكم الآلي أو تشغيل المرافق المجهزة بمثل هذا الأجهزة الأوتوماتيكية.
في البداية ، تم إنشاء TAU لدراسة إحصائيات وديناميكيات عمليات التحكم الآلي في الأشياء - الصناعية ، والطاقة ، والنقل ، إلخ. تم الحفاظ على معناه الرئيسي في عصرنا.
2. جوهر مشكلة التحكم الآلي وتعريف المفاهيم
^
2.1. الأنشطة وأنواع العمليات المختلفة
في اللغة الروسية ، يشمل مصطلح "الإدارة" مجموعة واسعة جدًا من المفاهيم ، بما في ذلك: الحكومة العليا للدولة ، وإدارة الدولة الوحدة الإقليمية، فرع من الاقتصاد الوطني ، مؤسسة ، مؤسسة ، ورشة عمل ، بشكل عام ، أي عملية إنتاج.
يمكن تقسيم النشاط البشري الهادف لتلبية الاحتياجات المختلفة إلى فئتين من العمليات: عمليات العمل وعمليات الإدارة.
ل عمليات العمل ربط الإجراءات اللازمة مباشرة لتنفيذ العملية وفقًا للقوانين الطبيعية التي تحدد مسار العملية (دوران عمود المحرك ، وإزالة الرقائق)
^ يسمى استبدال العمل البشري في عمليات العمل الميكنةوالغرض منها تحرير الإنسان من العمليات الثقيلة والضارة الرتيبة.
النشاط البشري
عمليات العمل
عمليات الإدارة
مكننة
أتمتة
إدارة الكائن هي عملية التأثير عليه من أجل ضمان التدفق المطلوب للعمليات في الكائنأو التغيير المنشود في حالته.
عمليات التحكم - توفر العمليات الزمنية اللازمة لبدء العمليات الفردية وتسلسلها وإنهائها ، مع تحديد المعلمات الضرورية للعملية نفسها.
تشكل مجموعة عمليات التحكم عملية التحكم. قد يشمل عمليات مثل مراقبة التشغيل الصحيح للأجهزة ، وضمان سلامة الأعطال ، وبدء التشغيل والإيقاف ، وتشغيل الأجهزة المساعدة الزائدة عن الحاجة ، وتوفير المعلمات المساعدة المطلوبة التي تميز عملية الإنتاج الخاضعة للرقابة.
^ يسمى استبدال العمالة البشرية في عمليات الإدارة بالأتمتة. ، أ الأجهزة التقنية، إجراء عمليات التحكم - الأجهزة الآلية. القيام بجميع العمليات الإدارية دون مشاركة مباشرة من شخص ما يسمىتحكم تلقائى ، والنظام الذي ينفذه هونظام التحكم الآلي (ACS) .
يُطلق على النظام الذي يتم فيه تشغيل جزء فقط من عمليات الإدارة تلقائيًا ، ويتم تنفيذ الجزء الآخر (عادةً ما يكون الأكثر مسؤولية) بواسطة الأشخاص نظام التحكم الآلي (ACS).
^
2.2. موضوع السيطرة والتأثير
التأثيرات المقلقة 
المديرين
تأثير
عطلة نهاية الاسبوع
كميات
^ كائن التحكم - مجموعة من الوسائل التقنية - الآلات والأدوات وأدوات الميكنة التي تؤدي هذه العملية .
تمارس البيئة الخارجية بالفعل العديد من التأثيرات على كل كائن تحكم ، وإذا كان الكائن لديه "صلابة هيكلية" و "قوة ديناميكية" (أداء الوظائف بالدقة المطلوبة ، على الرغم من خصائص القصور الذاتي والتداخل الحتمي) ، فلا داعي للتحكم الآلي.
من المستحيل عمليا أن تأخذ في الاعتبار جميع التأثيرات على الكائن ، لذلك فقط أولئك الذين لديهم التأثير الأكبر على قيم المخرجات يظلون في مجال الرؤية ويطلق عليهم تأثيرات المدخلات. تنقسم إجراءات الإدخال من حيث تأثيرها على تصرفات الكائن ، على قيم مخرجاته إلى مجموعتين رئيسيتين. تلك التي توفر التغيير المطلوب في سلوك الكائن تسمى المديرين. في غيابهم ، لا يوجد حل لمشكلة السيطرة على الإطلاق. من خلال التحكم اليدوي ، يتم تنظيم التأثير على الكائن بواسطة المشغل ، ومع التحكم التلقائي ، يتم التحكم في جهاز التحكم. تلك التأثيرات التي تتداخل مع تحقيق الهدف ، وعادة ما يكون من المستحيل تغييرها ، تسمى مقلقة.
تتمثل مهمة التحكم ، في جوهرها ، في تشكيل مثل هذا القانون للتغيير في إجراءات التحكم ، حيث يتم تحقيق السلوك المطلوب للكائن ، بغض النظر عن وجود اضطرابات.
^
3. مهام نظرية التحكم الآلي
تتمثل المهام الرئيسية لـ TAU في دراسة الخصائص الثابتة والديناميكية للأنظمة الأوتوماتيكية وتطوير الأنظمة التي تلبي المتطلبات الفنية المحددة.
تستكشف TAU مهمتين رئيسيتين:
تحليل أنظمة التحكم الآلي
توليف أنظمة التحكم الآلي.
أولها ، مهمة التحليل ، هي دراسة عملية تشغيل نظام تحكم أوتوماتيكي معين بهيكل معين وعناصر لمعلمات مختلفة للعناصر وأنواع مختلفة من التأثيرات على النظام. تشمل مهمة التحليل دراسة استقرار الأنظمة ، ودراسة الانحرافات الديناميكية والثابتة التي تحدث أثناء عمليات التحكم.
المهمة الثانية ، التوليف ، أكثر تعقيدًا وتتألف من بناء نظام تحكم آلي ؛ يتضمن اختيار مخطط جهاز التحكم وعناصره ومعلماته.
من الناحية النظرية ، يمكن اعتبار أي نظام ACS كنظام لتحويل إشارات القيادة والإزعاج إلى إشارة لقيم الإخراج.
يترك س = (x 1 , x 2 …., x ن ) - مجموعة من الإحداثيات المضبوطة للعملية (قيم المخرجات) ، Z = (ض 1 , ض 2 …., ض ن ) - تأثيرات مزعجة ، يو = (ش 1 , ش 2 …., ش ن ) - إجراءات التحكم.
كميات X ، U ، Zاعتمادًا على طبيعة الكائن ، ترتبط ببعض التبعيات الرياضية المختلفة. على العموم
X = W (Z ، U) ، (1)
حيث W هو عامل يحدد نوع التبعية.
مهمة التحليل: يتم إعطاء Z و U و W وهو مطلوب للعثور على X. عادة ما تكون هذه مهمة سلبية ، مطلوب X فقط هنا دون التدخل في العملية.
المهمة التجميعية: لها شخصية نشطة. - بالنظر إلى U و Z والشكل المطلوب من X ، يلزم العثور على W من أجل تلبية متطلبات X.
توليف التحكم النشط: بالنظر إلى W والشكل المطلوب لـ X. مطلوب العثور على U بحيث يلبي X المتطلبات.
^
3.1 مهام TAP الخطي:
تتضمن مهمة الإدارة المعقدة والمتعددة الاستخدامات ، في الغالبية العظمى من الحالات ، مهمة ضيقة من التنظيم. منذ التحكم الآلي لديها حاليا قيمة عملية، لذلك سننظر في الأمر أكثر.
تتميز أي عملية إنتاج بعدد من المؤشرات - معلمات قابلة للتعديل .
يُطلق على التوفير التلقائي للقيم المطلوبة للمعلمات القابلة للتعديل التي تحدد مسار عملية الإنتاج في الكائن الخاضع للرقابة وفقًا لقانون محدد مسبقًا التنظيم التلقائي ، والذي يوفره نظام التحكم الآلي (ACS).يسمى قسم TAU الذي يتعامل مع هذا بـ TAP. في دورتنا "أساسيات نظرية التحكم الآلي" سوف نتعامل مع المشاكل التالية لـ TAP.
قياس الخصائص والخصائص الديناميكية لأنواع مختلفة من الوصلات للأنظمة الآلية مهما كانت طبيعتها وتصميمها ؛
تشكيل المخططات الوظيفية والهيكلية لأنظمة التحكم والتنظيم الأوتوماتيكية ؛
بناء الخصائص الديناميكية لهذه الأنظمة ؛
تحديد الأخطاء ومؤشرات دقة الأنظمة المغلقة ؛
دراسة استقرار الأنظمة المغلقة.
تقييم مؤشرات الجودة لعمليات الإدارة ؛
تحديد حساسية الأنظمة للتغيرات في البارامترات والعوامل الأخرى ؛
دراسة أنواع مختلفةإدخال الأجهزة التصحيحية في الأنظمة لتحسين الدقة وتحسين الصفات الديناميكية.
إنشاء التردد والجذر وطرق أخرى لتركيب الأجهزة التصحيحية والطرق المختلفة لتحسين الأنظمة من حيث مؤشرات الجودة
^
4. تعيين أنظمة التحكم الآلي (C A R)
. الغرض يكمن في الأسماء نفسها ، والاختلافات واضحة من شكل وظيفة التعريف.
نظام التحكم الأوتوماتيكي لتحقيق الاستقرار هو نظام مصمم للحفاظ على ثبات أي معلمة لكائن ما.
تم تصميم النظام الآلي للبرامج لتغيير قيمة المتغير المتحكم فيه وفقًا لوظيفة زمنية معروفة مسبقًا (على الرغم من أنه يمكن تغيير المعلمات الأخرى).
تم تصميم نظام التتبع التلقائي لتغيير المتغير المتحكم فيه وفقًا للتغيير في متغير آخر يعمل عند مدخلات النظام وقانون التغيير غير معروف مسبقًا.
في أنظمة التثبيت والبرنامج والمؤازرة ، فإن الهدف من التحكم هو ضمان المساواة أو قرب القيمة الخاضعة للرقابة من القيمة المعينة ، والتي يتم تنفيذها من خلال الحفاظ على x (t) »x s (t) ، يسمى اللوائح.
^
5. مبادئ بناء ATS (المبادئ الأساسية للإدارة)
يحدد مبدأ التحكم الآلي كيف وعلى أساس المعلومات التي يتم تشكيل إجراء التحكم فيها. إحدى السمات الرئيسية التي تميز مبدأ التنظيم هي معلومات العمل اللازمة لتطوير التحكم في التأثير وهيكل سلسلة انتقال التأثيرات في النظام.
^
5.1 مبدأ الحلقة المفتوحة
يكمن جوهر المبدأ في حقيقة أن خوارزمية التحكم تم تطويرها فقط على أساس خوارزمية التشغيل ولا يتم التحكم فيها بواسطة عوامل اضطراب أخرى أو إحداثيات إخراج للعملية. رسم بياني وظيفيظاهر أدناه
يتم ضمان القرب من X و X o فقط من خلال تصميم واختيار القوانين الفيزيائية التي تعمل في العناصر. على الرغم من أوجه القصور الواضحة ، يتم استخدام المبدأ على نطاق واسع. العناصر المدرجة في الدائرة المفتوحة هي جزء من أي نظام ، لذلك يبدو المبدأ بسيطًا جدًا بحيث لا يتم تمييزه دائمًا كأحد المبادئ الأساسية. 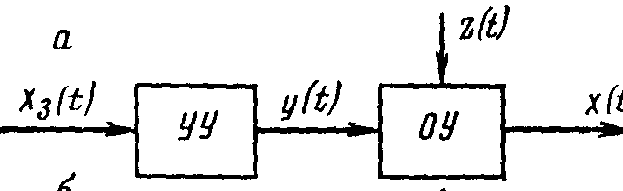
xض (ر)
- يحدد خوارزمية الأداء.
تتضمن عناصر النوع المفتوح:
العناصر المنطقية ، أو ، أو لا ، مستشعرات البرنامج وآلية البرنامج نفسها ، أي جهاز بدء التشغيل ، على سبيل المثال ، آلية كام مبرمجة ، عد العناصر.
^
5.2 مبدأ التحكم في الاضطرابات (التعويض)
وهو يتألف من حقيقة أنه من بين الاضطرابات المختلفة التي تعمل في النظام ، يتم اختيار واحد رئيسي ، والذي يتفاعل معه ACS. في هذه الحالة ، عوض تأثير خارجيعلى المعلمة الخاضعة للرقابة للإزعاج الرئيسي فقط ، ويتم إنشاء إجراء التحكم في النظام اعتمادًا على نتائج التغيير في الاضطراب الرئيسي الذي يعمل على الكائن.
عيوب:
يقتصر التطبيق على الكائنات التي تُعرف خصائصها.
نظرًا لأن النظام ، في الواقع ، حلقة مفتوحة ، تظهر انحرافات المتغير المتحكم فيه مع تغيير في خصائص الكائن وعناصر النظام
القضاء على التأثير الذي خلق قنوات التعويض.
^
5.3 مبدأ التحكم في الانحراف (مبدأ Polzuvov-Watt)
مزايا:
1) يقلل من انحراف القيمة المضبوطة بغض النظر عن العوامل التي تسببت في هذا الانحراف.
2) أقل حساسية للتغيرات في معاملات عناصر النظام مقارنة بالأنظمة المفتوحة.
عيوب:
1) في أنظمة الدائرة الواحدة البسيطة ، لا يمكن تحقيق الانعكاس المطلق.
2) هناك مشكلة استقرار.
يتم إنشاء إجراء التحكم (التنظيم) على أساس الفرق بين القيم المضبوطة والقيم المحددة. الارتباط المعرف بشكل فريد يسمى الارتباط الرئيسي. يتم تغذية المعلمة المتحكم بها من خلال التغذية المرتدة الرئيسية لمدخلات وحدة التحكم مع الإشارة المعاكسة فيما يتعلق بـ q (t). لذلك ، تعتبر العلاقة الرئيسية سلبية.
الميزة السلبية للنظام المغلق هي تنوعه. يؤدي أي انحراف للمعامل المتحكم به عن القيمة المحددة إلى ظهور إجراء تحكم ، بغض النظر عن عدد الاضطرابات ونوعها ومكانها.
في الأنظمة التي تعمل على مبدأ الانحراف ، يكون الخطأ ضروريًا لتشكيل إجراء تحكم. هذا في حد ذاته يعتبر عيبًا ، حيث إنه الخطأ الذي يحتاج إلى تغيير من قبل المنظم. عند التحكم في كائنات بالقصور الذاتي المعقدة ، عندما لا يمكن أن يتسبب إجراء التحكم في حدوث تغيير فوري في المعلمة الخاضعة للرقابة ، فقد يكون الخطأ الناتج كبيرًا بشكل غير مقبول.
^
5.4. التنظيم المشترك
كل من الأمثلة المذكورة أعلاه لها مزاياها وعيوبها. لذلك ، لإنشاء أنظمة أوتوماتيكية عالية الدقة ، عادةً ما يتم استخدام مبدأ التنظيم المشترك ، والذي يجمع بين كلا المبدأين. 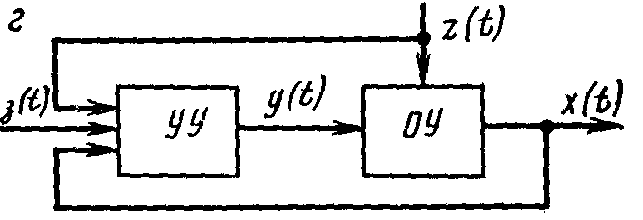
في النظام المدمج ، يتم تعويض الإجراء الخارجي عن طريق الإجراء التنظيمي وفقًا لتغييره ، ويتم استخدام إجراء الانحراف لإزالة الأخطاء الناتجة عن التنظيم غير الدقيق.
^
5.5 مبدأ التكيف
تُستخدم مبادئ التكيف (التكيف) في الضبط الذاتي للمنشطات الأمفيتامينية. تكمن خصوصيتها في أنها تتكيف تلقائيًا مع ظروف التشغيل المتغيرة وتختار تلقائيًا قانون التحكم الأمثل. لا يمكن أن توفر ACS التي تم النظر فيها مسبقًا مع إعداد ثابت للمعلمة الخاضعة للرقابة ، والتي يتم فيها تقليل عملية التحكم إلى القضاء على الانحراف عمل عاديموضوع التنظيم إذا تغيرت خصائصه الثابتة والديناميكية بمرور الوقت. في مثل هذه الحالات ، من الضروري تغيير إما إعدادات وحدة التحكم ، أو خصائص ومعلمات العناصر الفردية للنظام ، أو مخطط العناصر ، أو حتى تشغيل عناصر جديدة.
المحاضرة رقم 2
إجراءات الإدخال النموذجية وخصائص الروابط.
^
1. الأثر وأنواعها.
كما هو مذكور أعلاه ، تمتلك ACS تأثيرات تحكم (إعداد) ومقلقة ، ونتيجة لذلك تحدث عملية عابرة في النظام ، مما يؤدي بالنظام إلى حالة مستقرة جديدة. في الظروف الحقيقية ، يمكن أن تكون التأثيرات عشوائية. لدراسة الخصائص الديناميكية للعناصر والأنظمة ، يتم اختيار مثل هذه الإجراءات النموذجية التي من شأنها أن تعكس عن كثب أهم ميزات الإجراءات الحقيقية قدر الإمكان. يمكن أن تكون هذه التأثيرات على الأرجح، أو الأكثر الآثار السلبية. علاوة على ذلك ، يمكن تقسيمها إلى منتظمة وعشوائية ومستمرة ومنفصلة.
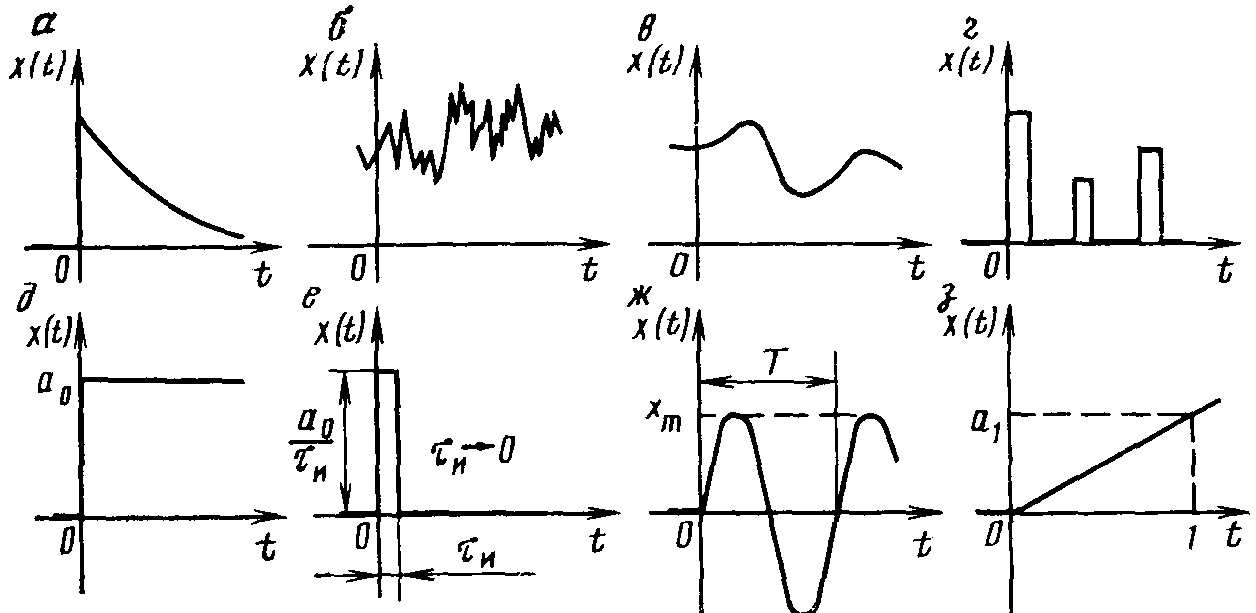
للتحليل ، تم اختيار التأثيرات النموذجية التي تعرض بشكل كامل وتوضيحي ميزات الروابط المختارة. يتم قبول التزايد التدريجي ، التوافقي ، الخطي كنموذجي.
يمكن أن تحدث قفزة واحدة عندما يتم إغلاق الشبكة أو فتحها على الفور التيار المباشربسبب تطبيق أو فصل الأحمال.
عمل خطوة واحدة
 .
.
العمل النبضي الفردي
 لذا
لذا  .
.
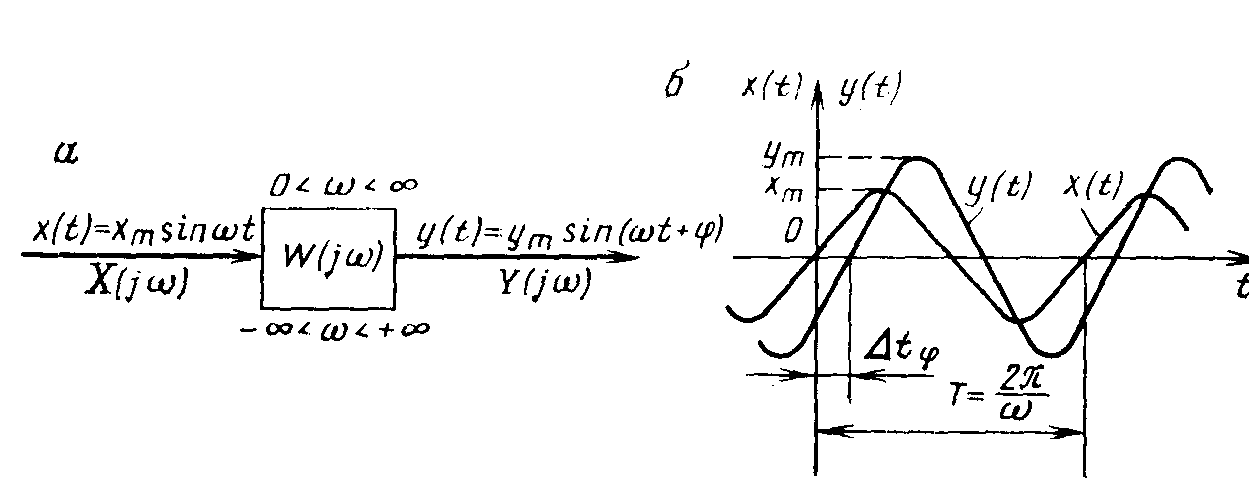
التأثير التوافقي هو وظيفة تتغير وفقًا لقانون الجيب أو جيب التمام. يتم استخدامه في تحليل الخصائص الديناميكية للـ ACS بواسطة طرق التردد. تتكون طريقة التردد من تكوين خصائص التردد.
x(ر) = 1 (ر) xم الخطيئة ثر.
بالنسبة لأنظمة المؤازرة والبرامج ، يكون الإجراء الخطي النموذجي
x(ر) = 1 (ر) أ ر.
تظهر أوضاع انتقال ACS من حالة إلى أخرى في الشكل.
^
2. التوقيت
يتم تقديم تمثيل مرئي لخصائص الارتباط من خلال وظيفة تمثل حلًا لمعادلة تفاضلية. لكن يمكن أن يكون للمعادلة التفاضلية نفسها العديد من الحلول ، والتي يعتمد شكلها المحدد على الشروط الأولية وطبيعة الوظيفة التي تحدد الإجراء. لذلك ، من المعتاد وصف الخصائص الديناميكية لعناصر النظام بحل يتوافق مع الظروف الأولية الصفرية وأحد الإجراءات النموذجية المذكورة أعلاه. يتم الحصول على التمثيل المرئي الأكثر للخصائص الديناميكية لعنصر من خلال استجابته العابرة.
الخاصية العابرة h (t) هي التغيير في قيمة المخرجات التي تحدث بعد تطبيق تغيير مفاجئ في قيمة الإدخال على الإدخال في ظل ظروف أولية صفرية.
^ الاستجابة النبضية w (t) هي التغيير في قيمة المخرجات التي تحدث بعد إدخال دالة دلتا تحت ظروف أولية صفرية.
الاستجابة النبضية تساوي مشتق الاستجابة العابرة
ث(ر) = د(ر)/ د,
على العكس من ذلك ، فإن الاستجابة العابرة تساوي تكامل الاستجابة النبضية.
خصائص عابرة وتسمى أيضا مؤقتة.
^
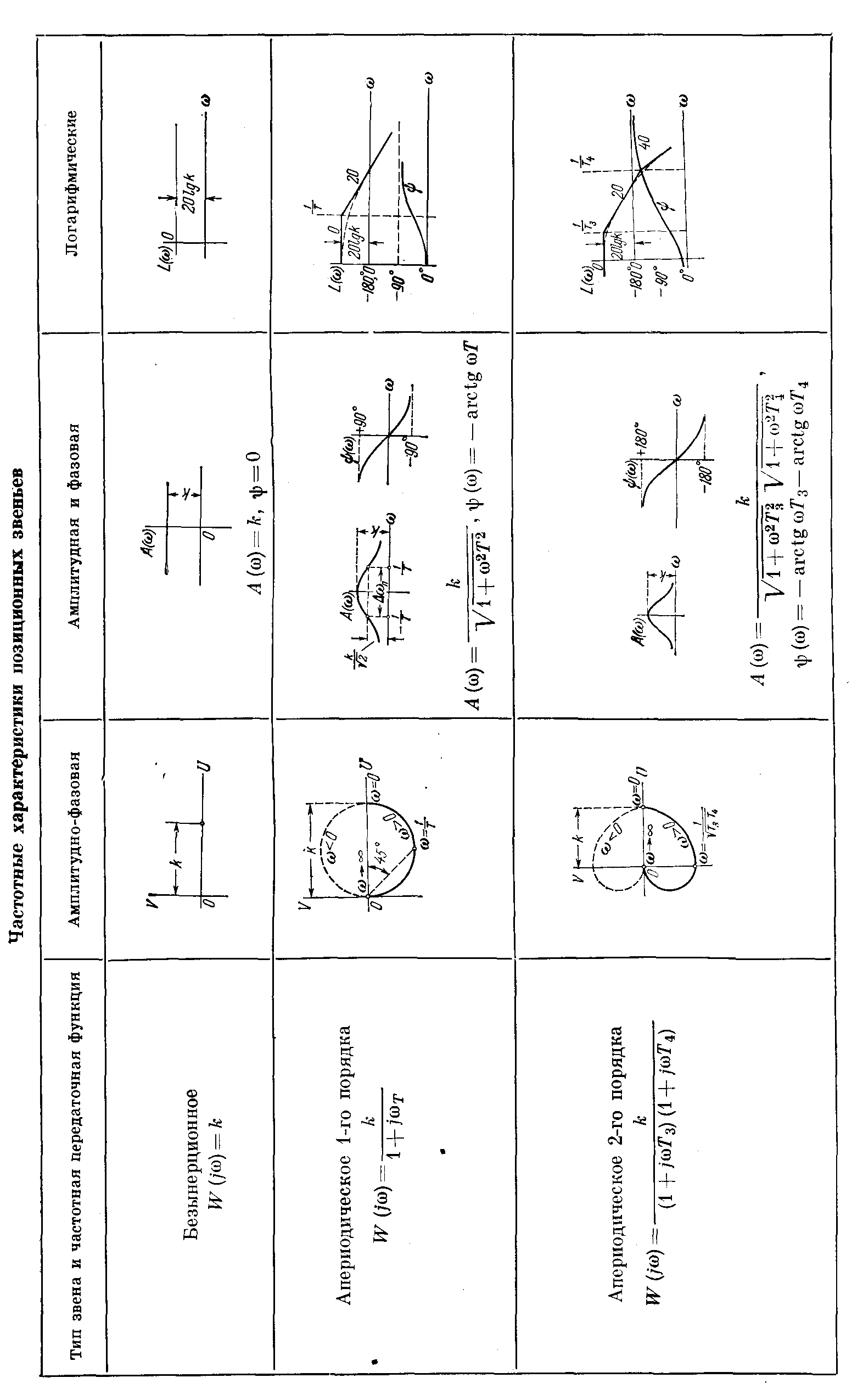
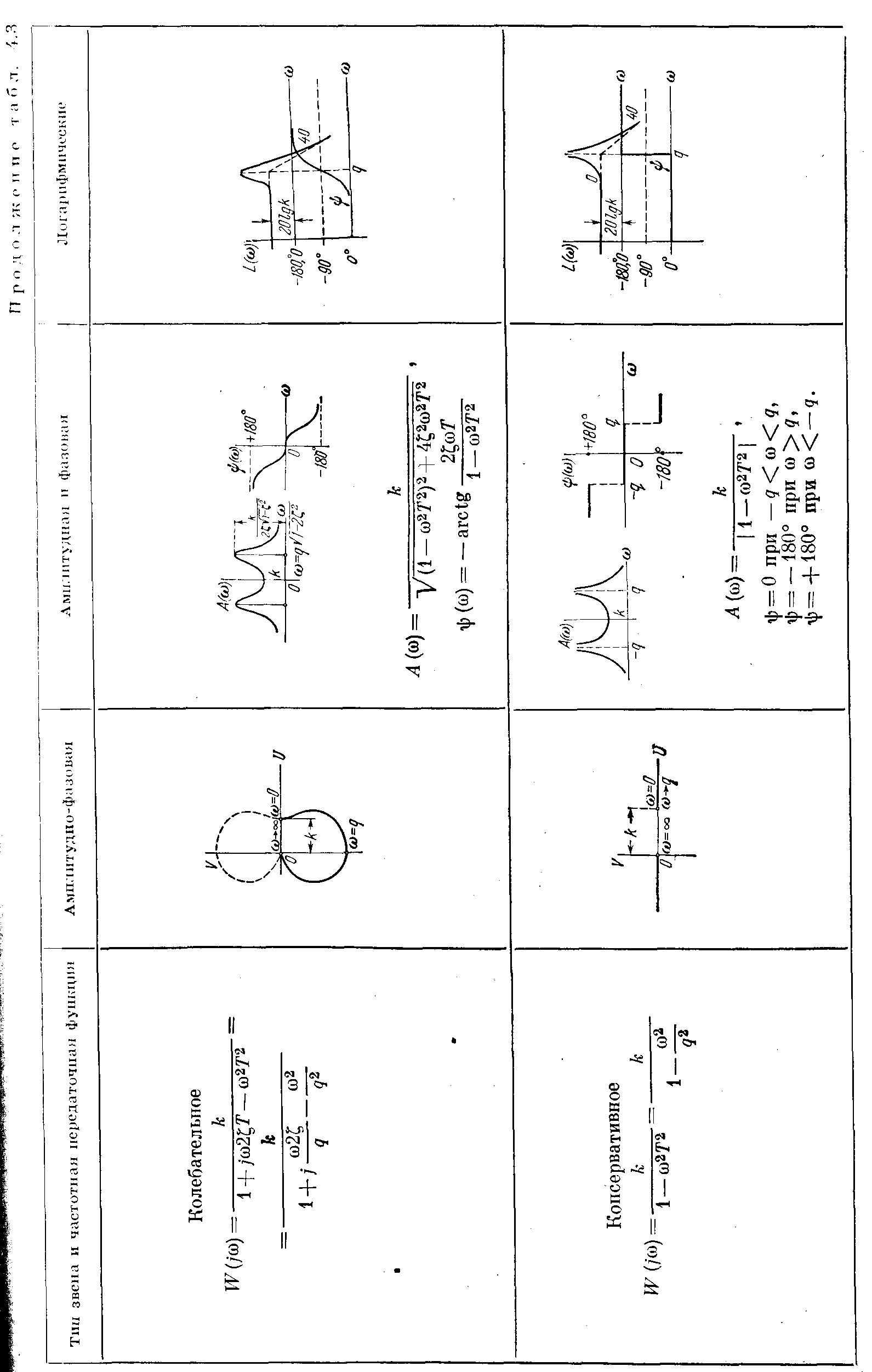
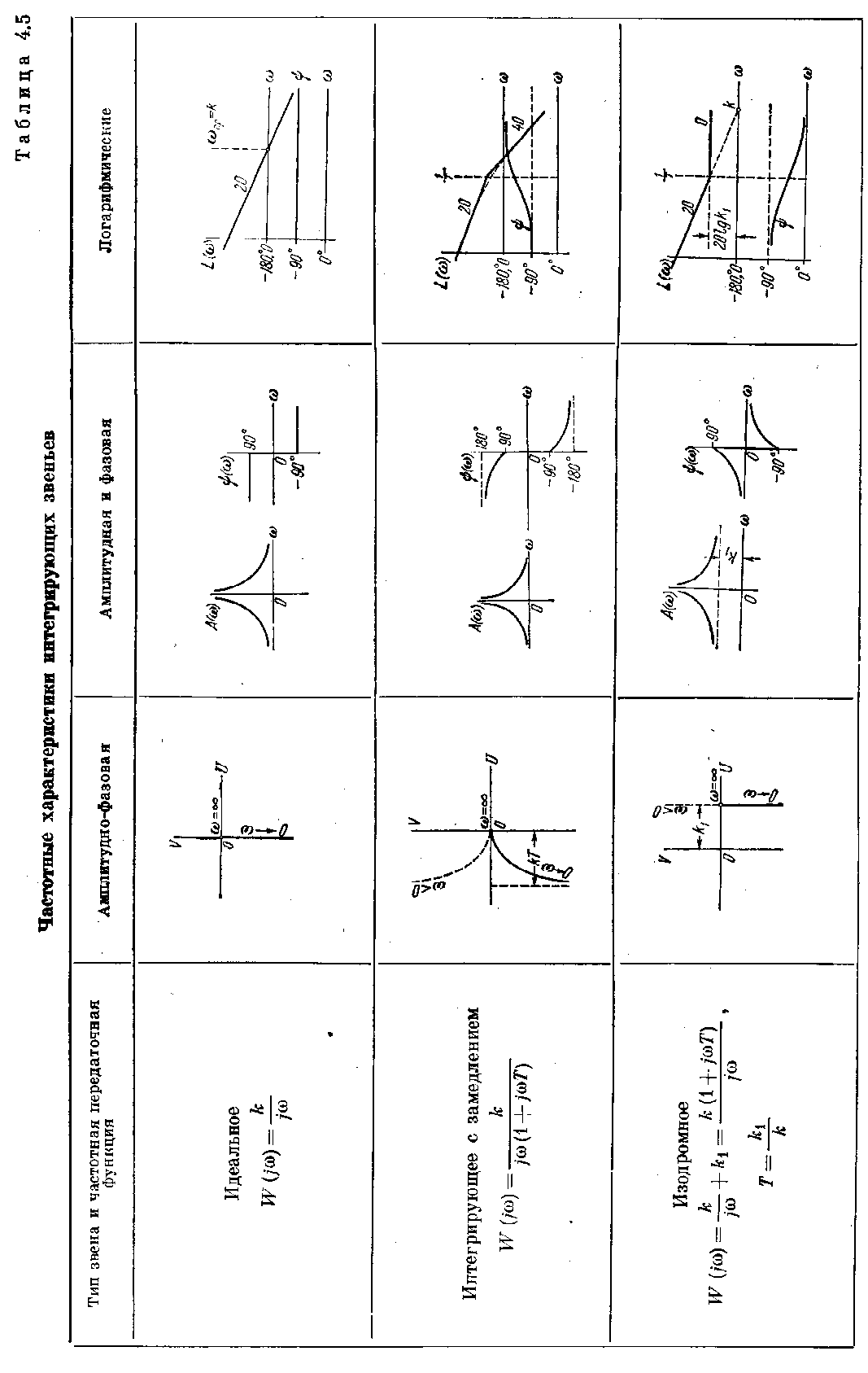
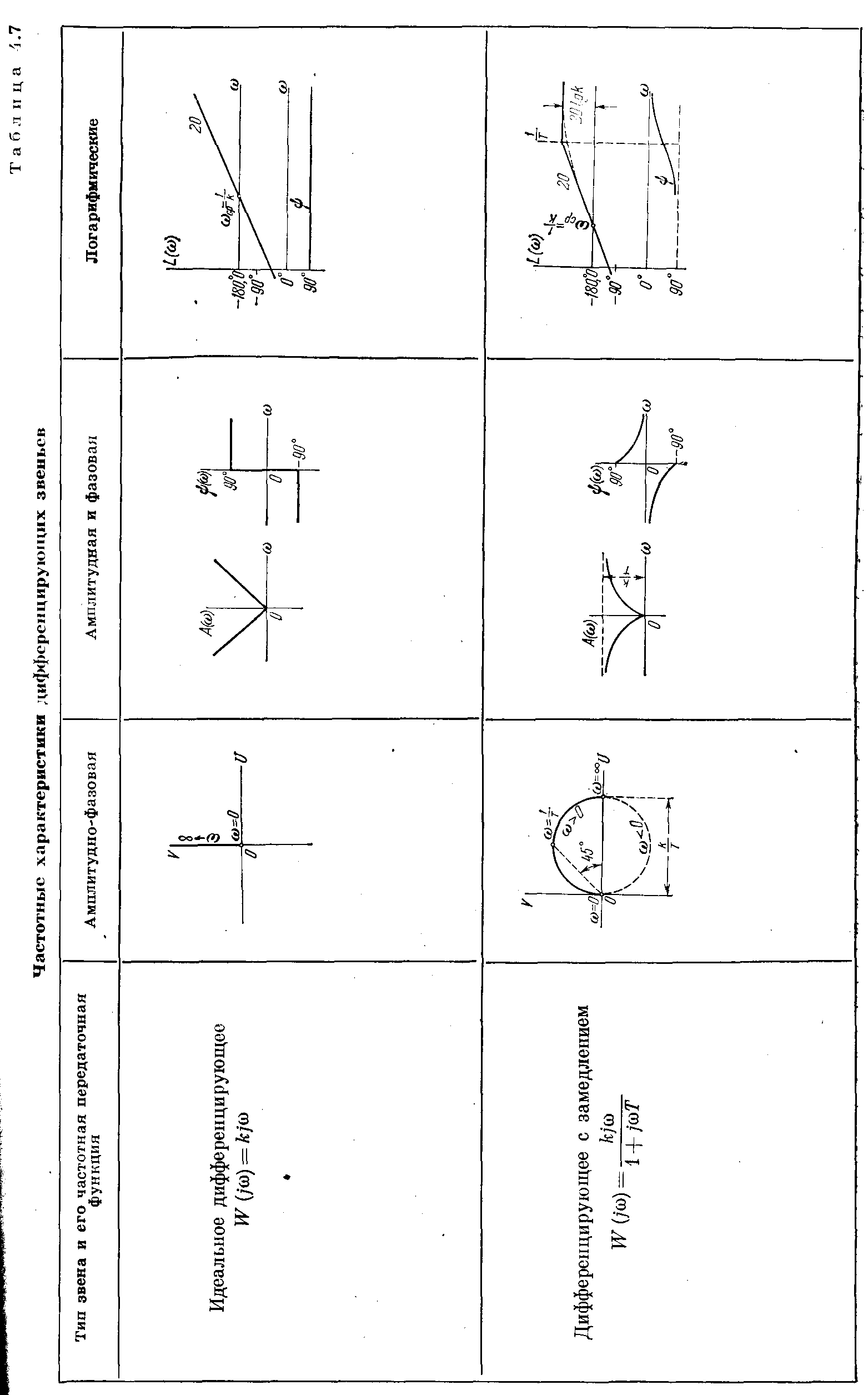
3. خصائص التردد
تسمى خصائص التردد التبعيات التي تربط قيم الإدخال والإخراج نظام خطيفي حالة ثابتة ، عندما يتغير إجراء الإدخال وفقًا للقانون التوافقي x (t) = وزن الخطيئة مع التردد والسعة الثابتة أ. عند إخراج النظام بعد الانتهاء من التذبذبات الجيبية العابرة ، يتم إنشاء y (t) = b sin (wt + j). على المستوى المعقد ، يتم تحديد كميات المدخلات والمخرجات لكل مرة t بواسطة المتجهين a و b.
في شكل مثلثي معقد
X = a (cos wt + j sin wt)
ص = ب.
باستخدام صيغة أويلر e jwt = cos wt + j sin wt نحصل عليها
X (t) = ae jwt ؛ y (t) = be j (wt + j).
إذا تم ترك سعة التذبذبات لقيمة الإدخال دون تغيير ، وتغير التردد w من صفر إلى ¥ ، فإن قيمًا معينة لسعة التذبذب b وإزاحة الطور j عند خرج النظام سوف تتوافق مع كل قيمة تردد. هذا يعني أن نسبة السعة وفرق الطور هما من وظائف التردد ، أي:
ب / أ = أ (ث) ؛ ي = ي (ث).
ترتبط خصائص الوقت والإرسال والتردد المذكورة أعلاه ببعضها البعض بشكل فريد من خلال تحويلات لابلاس وفورييه المباشرة والمعكوسة. ينعكس هذا في الجدول.
جدول.
المراسلات المتبادلة للخصائص الديناميكية.
| الشخصيات | ح (ر) | ث (ر) | W (ع) | دبليو (يث) |
| انتقالية ح (ر) = |
| إل -1
(W (ع) / ع) | F -1
(دبليو (يث) / يث}
|
|
| نبض ث (ر) = | dh (t) / dt | إل -1
(W (ع)) | F -1
(دبليو (يث)}
|
|
| هيأ W (ع) = | pL (ح (ر)) | L (w (t)) | دبليو (يث)
½ ع = ي ث |
|
| تكرار دبليو (يث)=
| يثF (ح (ر)) | F (ث (ر)) | W (ع)½ ع = ي ث |
4. وصلات نموذجية للعناصر وخصائصها
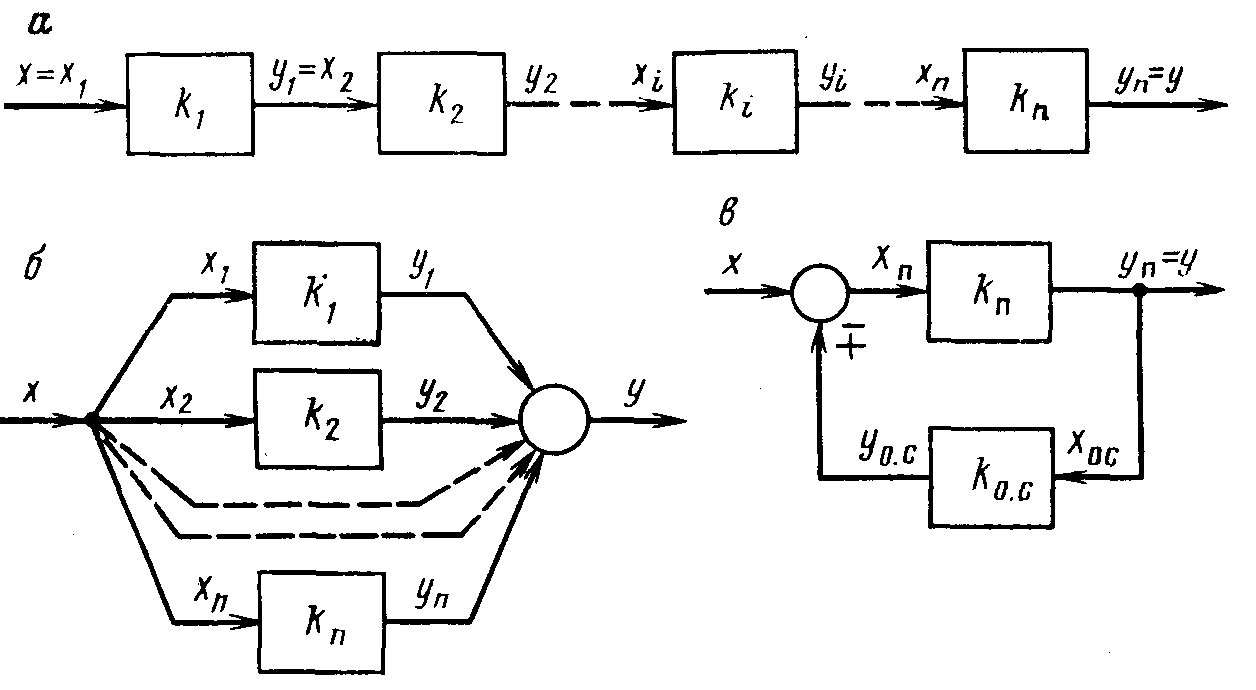
الهيكل الخوارزمي لأي ACS هو مزيج من ثلاثة وصلات ارتباط نموذجية ؛ سلسلة ، متوازية ، ومتتالية (تغطية التغذية الراجعة) ، كما هو موضح في الشكل.
الاتصال المتسلسل هو اتصال تكون فيه قيمة الإخراج لكل عنصر سابق هي المدخلات إلى العنصر التالي. منذ لكل عنصر من عناصر معادلة الإحصائيات نكتب
ذ أنا = ك أنا ذ أنا -1 , ()
الذي - التي إجمالي معامل الإرسال للوصلات المتصلة بالسلسلة يساوي ناتج معاملات الإرسال الخاصة بها

 . ()
. ()
وفقًا لذلك ، وظيفة النقل المكافئة اتصال تسلسليعدد n من الروابط يساوي منتج وظائف نقل n للروابط
 . ()
. ()
الاتصال المتوازي هو اتصال يتم فيه تطبيق نفس الإجراء على مدخلات جميع الروابط ، ويتم تلخيص قيم مخرجاتها. حسب هذا التعريف
س = س 1 =… = س أنا =… = س ن , ()
ص = ذ 1 +… + ذ أنا +… + ذ ن , ()
ذ أنا = ك أنا x أنا , ()
ومن بعد إجمالي معامل الإرسال للوصلات المتصلة المتوازية يساوي مجموع معاملات الإرسال الخاصة بها
 . ()
. ()
وفقًا لذلك ، وظيفة النقل المكافئة اتصال موازيةعدد الروابط n يساوي مجموع وظائف النقل n للروابط
 . ()
. ()
الاتصال المضاد المتوازي لرابطين (اتصال التغذية المرتدة) هو اتصال يتم فيه تغذية إشارة خرج الارتباط الأول بمدخل الثاني ، وتضاف إشارة خرج العنصر الثاني إلى إشارة الإدخال الشائعة. يسمى الارتباط الأول ارتباط السلسلة المباشر ، ويسمى العنصر الثاني ارتباط التغذية الراجعة. اعتمادًا على علامة إشارة التغذية المرتدة ، يتم تمييز الردود الإيجابية والسلبية. وفقًا لتعريف مفهوم التغذية الراجعة ، يمكننا كتابة المعادلات التالية:
اتصال مباشر
ذ ص = ك ص x ص , ()
تعليق
ذ o.s. = ك او اس ذ, ()
وعقدة الجمع
 . ()
. ()
بالتعويض ، نحصل على معادلة احصائيات الاتصالات مع التغذية الراجعة
 . ()
. ()
من هنا وصلنا
 . ()
. ()
معامل التحويل الكلي للرابط الذي تغطيه التغذية الراجعة ، يساوي المعاملدارة أمامية مقسومة على واحد زائد حاصل ضرب معاملات الأمام ومعاملات التغذية الراجعة.
علاوة على ذلك ، فإن العلامة "+" تتوافق مع ردود الفعل السلبية ، والعلامة "-" - إيجابية.
وفقًا لذلك ، تكون وظيفة النقل المكافئة لاتصال الحلقة المغلقة هي
 ()
()
حيث تتوافق علامة "+" مع الملاحظات السلبية ، وعلامة "-" تشير إلى إيجابية.
المحاضرة رقم 3
الروابط النموذجية وخصائصها
- ^
الأوصاف والخصائص العامة
أ 0 ذ "" (ر) + أ 1 ذ " (ر) + أ 2 ص (ر) = ب 0 x " (ر) + ب 1 س (ر). (1)
من المعتاد إحضار معادلة الارتباط إلى النموذج القياسي في تدوين رمزي:
أين تي 2 2 =أ 0 /أ 2 ; تي 1 = أ 1 /أ 2 ; ر =ب 0 /ب 1 - ثوابت الوقت. ك = ب 1 /أ 2 .
تذكر كيف يمكنك الحصول على خصائص الروابط:
ثابت ، معادلة المشتقات الزمنية بالصفر ،
متحرك: ... .
W (p) = R (p) / Q (p) = k (tp + 1) / (T. 2 2 ص 2 + ت 1 ص + 1) , (2)
للحصول على استجابة عابرة ح (ر)البحث عن قرار مشتركتتكون من جزأين. الاستجابة النبضية هي المشتق الزمني للاستجابة العابرة w (t) = dh (t) / dt.
من نظرة عامةمعادلة أو وظيفة النقل ، يمكنك استخلاص بعض الاستنتاجات حول خصائص الروابط. إذا كانت المعاملات أ 2 و ب 1 لا تساوي الصفر ، فهذه الروابط تسمى ثابتة أو موضعية ، مما يدل على وجودها معادلات احصائيات. بخلاف ذلك ، تكون الروابط ثابتة من الترتيب n ، حيث n هي درجة عامل التمايز ، الذي يميز استاتيكية الارتباط أو النظام.
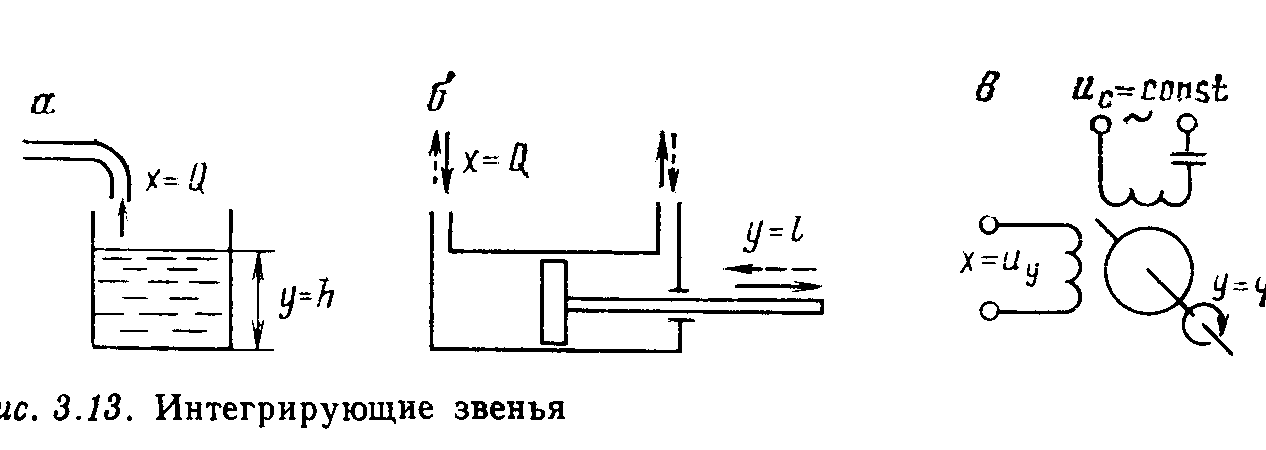
يُطلق على عدد من الروابط اسم أولي ، أي القصور الذاتي ، والتمييز بشكل مثالي والتكامل بشكل مثالي.
شكل
^
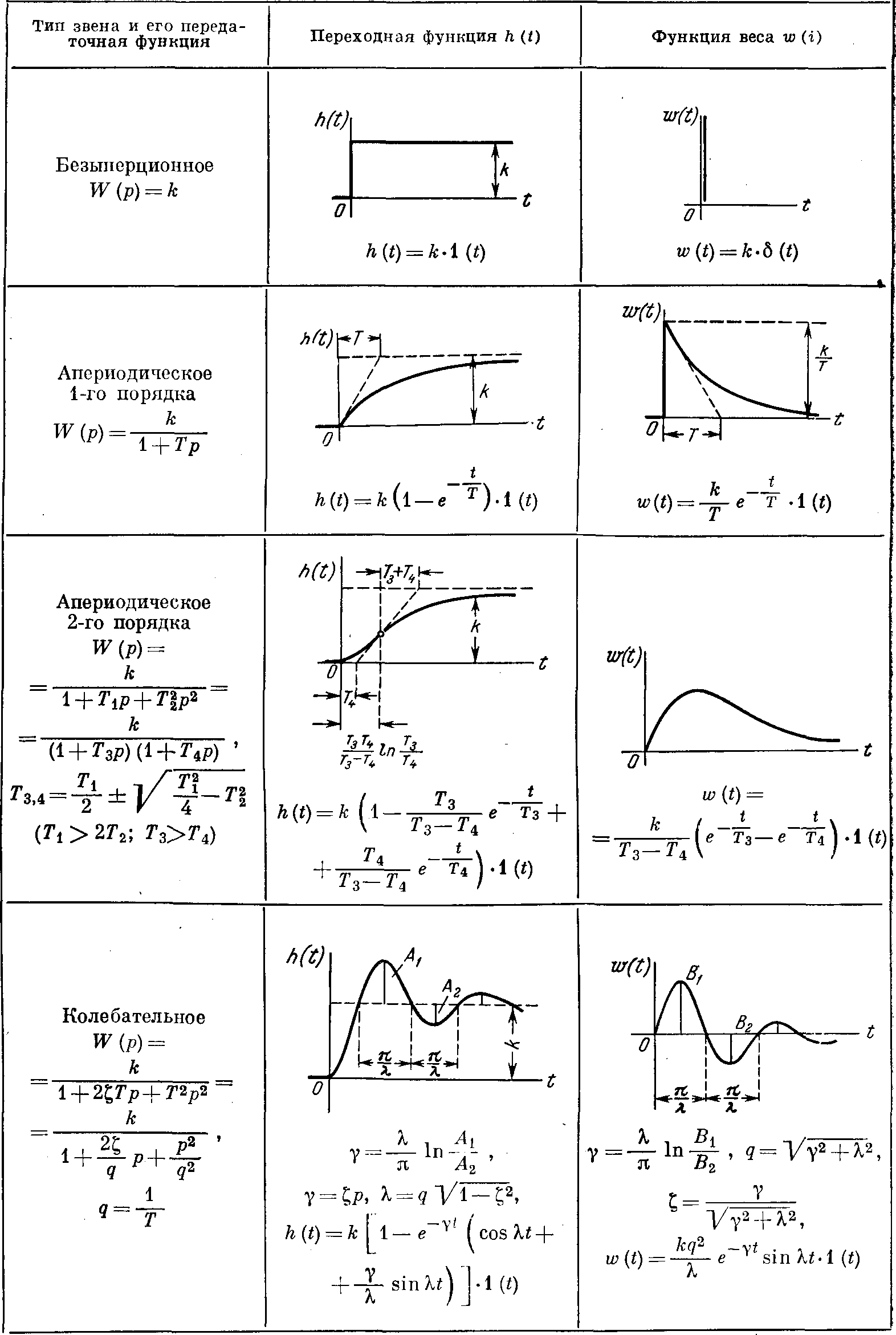
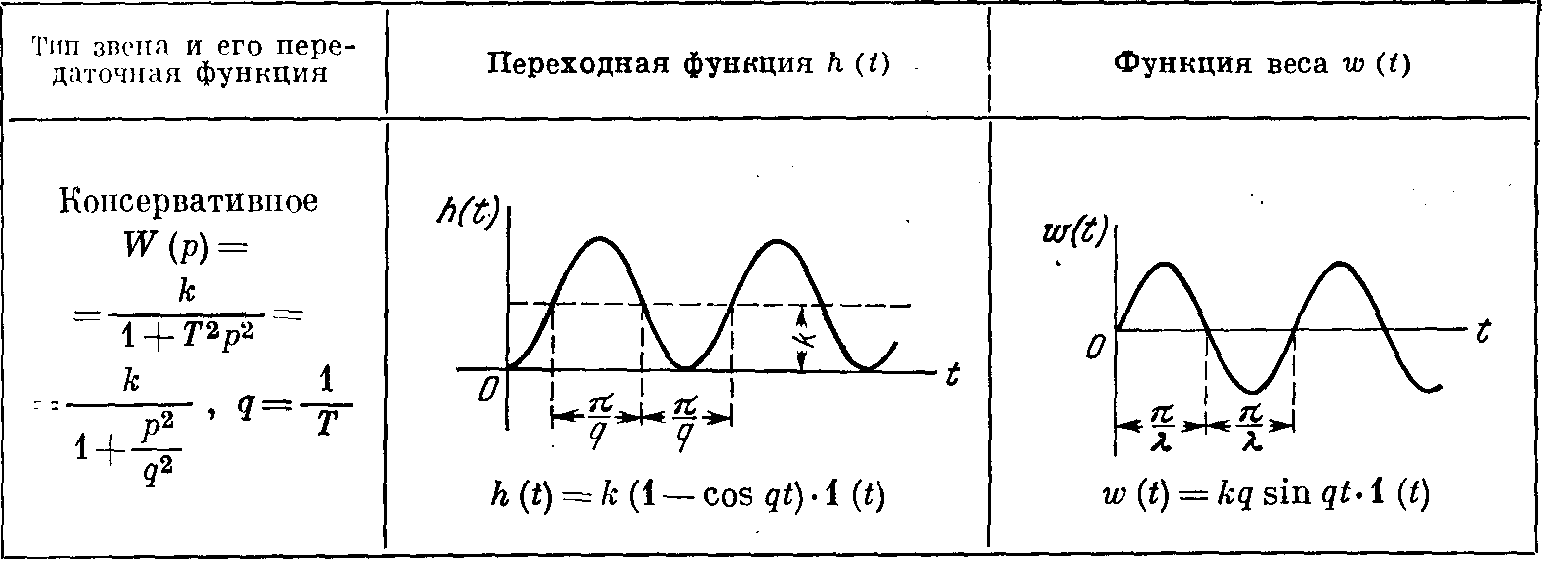
2. نظرة عامة وأمثلة
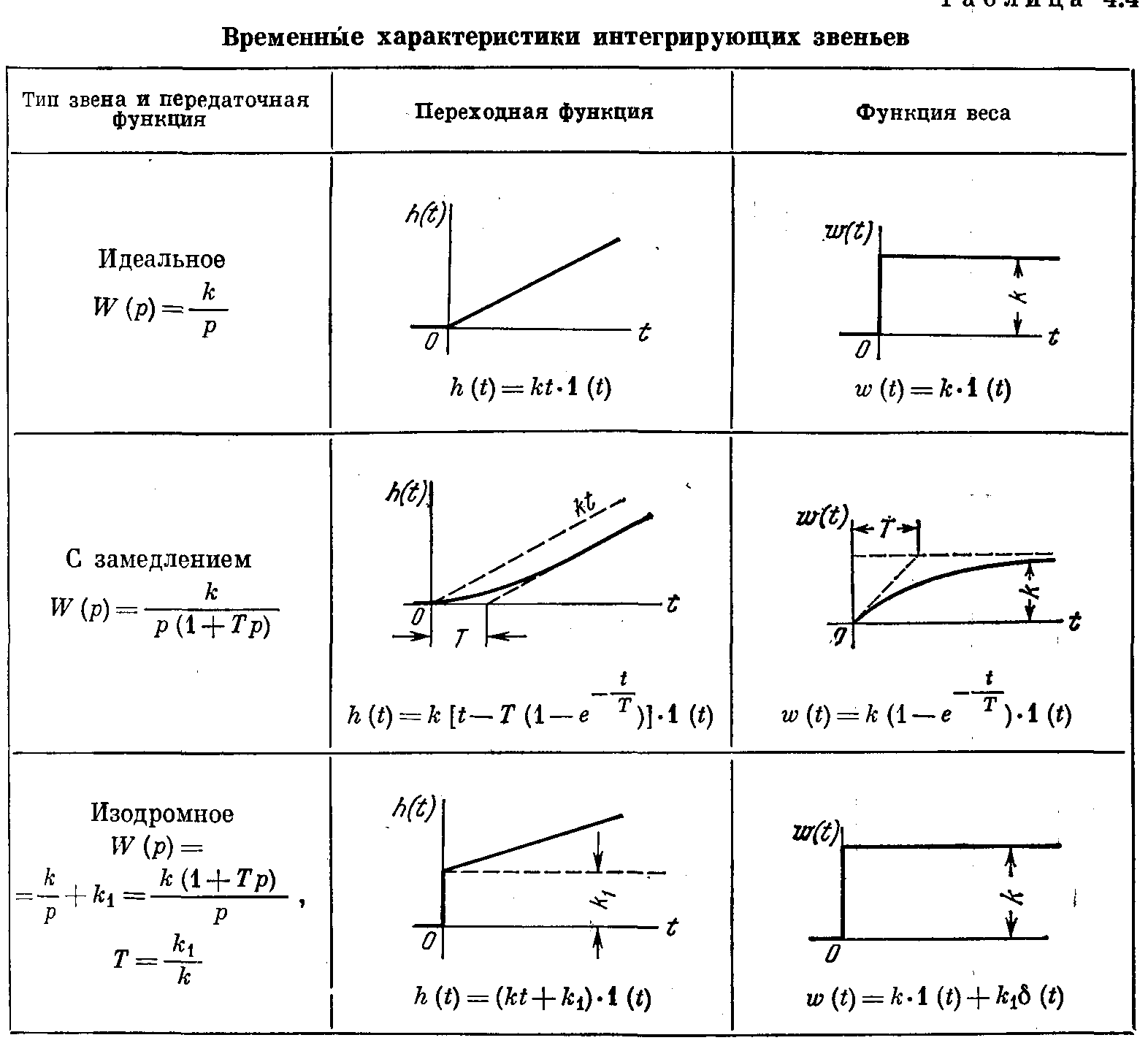
الجدول 3.1
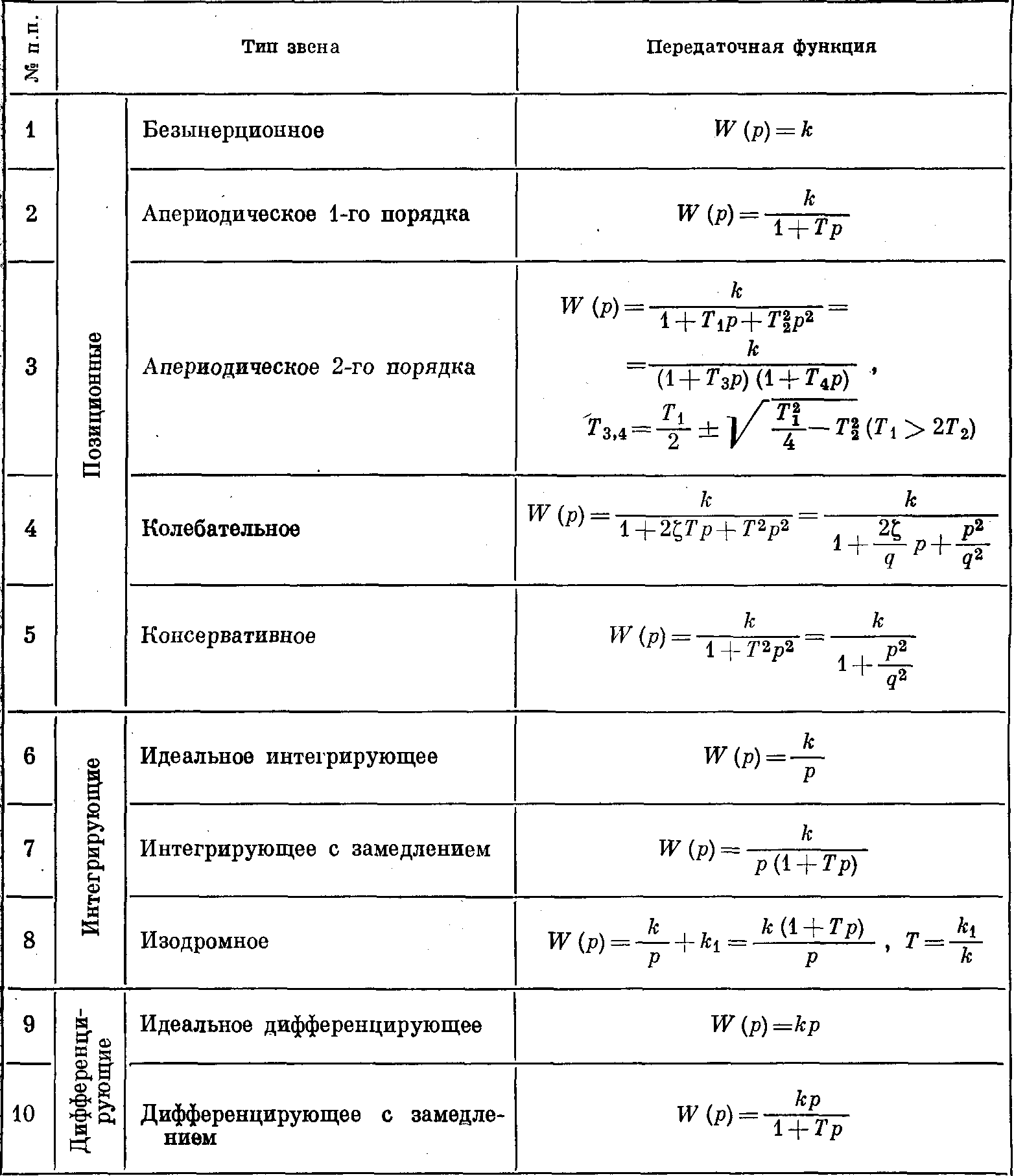
الجدول 3.2 خصائص التوقيت للوصلات الموضعية
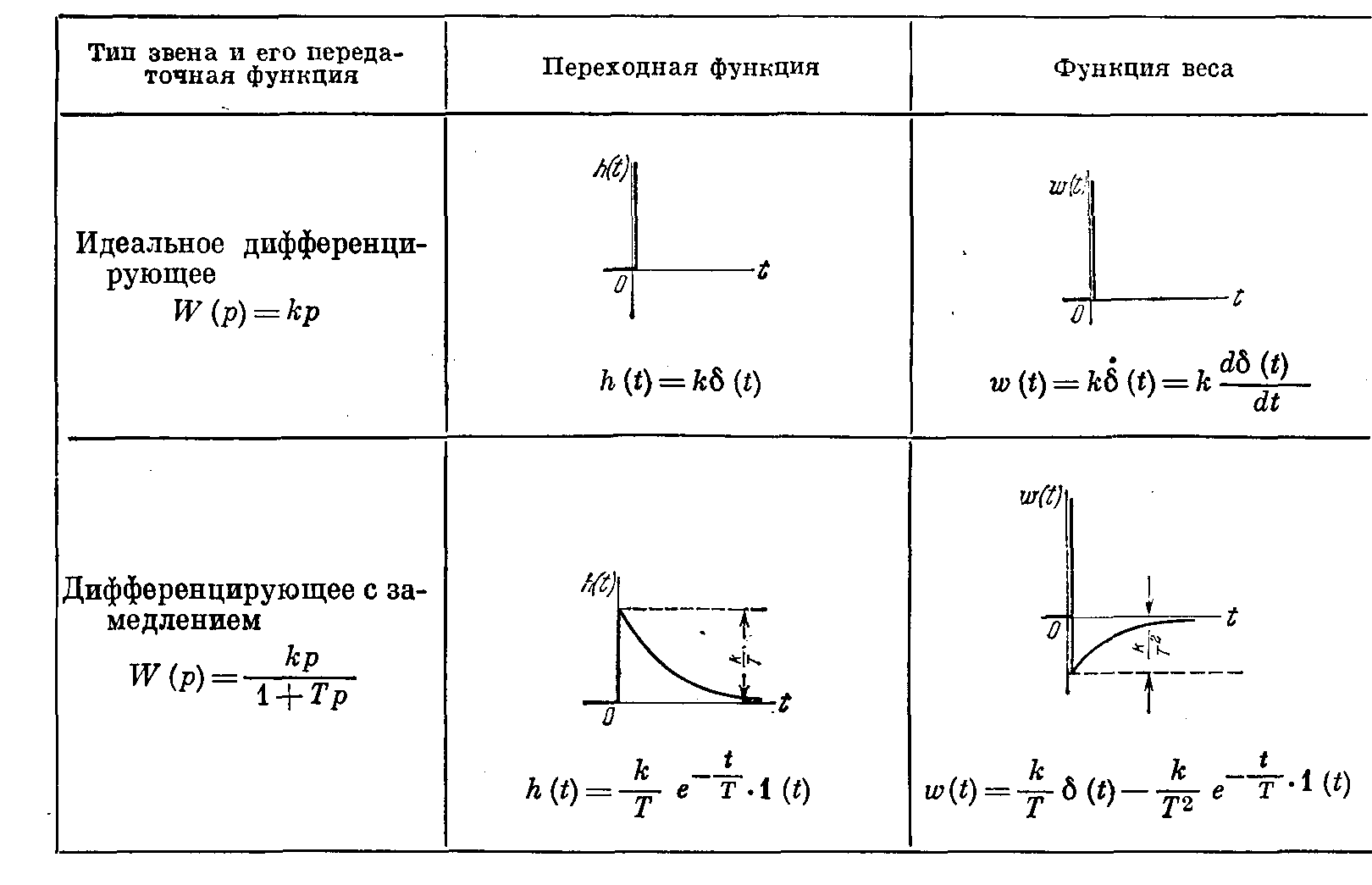
الجدول 3.6
الخصائص الزمنية للروابط المتمايزة
^
3. تطبيقات الروابط
المحاضرة رقم 4
^
استقرار أنظمة التحكم
4.1 مفهوم الاستقرار وأنواعه وشرطته العامة
الاستقرار هو أحد أهم خصائص نظام التحكم الآلي إلى جانب الدقة. علاوة على ذلك ، إذا كانت مؤشرات الدقة تحدد درجة فائدة وكفاءة النظام ، فإن أداء النظام يعتمد على الاستقرار. لذلك ، فإن مشكلة استقرار النظام هي واحدة من المشاكل المركزية في نظرية التحكم الآلي.
دعونا فتح المعنى الماديمفهوم "الاستدامة". استقرار النظام التلقائي هو خاصية للنظام للعودة إلى حالته الأصلية من التوازن بعد توقف التأثير الذي أخرج النظام من هذه الحالة. لا يعود النظام غير المستقر إلى حالته الأصلية ، بل يبتعد عنه باستمرار.
يحدث عدم استقرار أنظمة التحكم الآلي ، كقاعدة عامة ، بسبب الإجراء غير الصحيح أو القوي جدًا للتعليقات الرئيسية. عادةً ما يحدث التشغيل غير الصحيح للتعليقات الرئيسية عندما يكون الاتصال إيجابيًا (بدلاً من السالب) بسبب خطأ حدث أثناء تثبيت النظام ، مما يجعل النظام غير مستقر لأي معلمات تقريبًا. النتيجة يسمى عدم الاستقرار ثابت .
نوع أكثر تعقيدًا وانتشارًا من عدم الاستقرار هو عدم الاستقرار الديناميكي. يتجلى في أنظمة ذات ردود فعل سلبية ، مع ما يكفي أهمية عظيمة نسبة والعتاددارة مفتوحة وعدد وصلات القصور الذاتي لا تقل عن ثلاثة. عادة ما يكون سبب عدم الاستقرار الديناميكي هو القصور الذاتي الكبير لعناصر الحلقة المغلقة ، والتي بسببها ، في وضع التذبذب في النظام ، تتخلف إشارة التغذية المرتدة الرئيسية بشكل كبير عن إشارة الإدخال وتكون في طور معها. هذا يعني أن الاتصال ، الذي تم إجراؤه بشكل بناء على أنه سلبي (في الوضع الثابت!) ، في الديناميات (في وضع التذبذبات التوافقية) يظهر عند تردد معين على أنه إيجابي.
تأمل الجوهر الرياضي للاستقرار وعدم الاستقرار. وفقًا للتعريف المادي الوارد أعلاه ، يعتمد الاستقرار فقط على طبيعة الحركة الحرة للنظام. يتم وصف الحركة الحرة لنظام خطي أو خطي بواسطة معادلة تفاضلية متجانسة
أ 0 X(ن ) (ر)+ أن -1 X(ن -1 ) (ر)+…+ أن -1 X¢ (ر)+ أن X (ر)= 0. (4.1)
أين X (ر) = Xج (ر) - مكون مجاني لقيمة إخراج النظام.
المكون القسري لقيمة المخرجات ، والذي يعتمد على نوع التأثير الخارجي والجانب الأيمن من المعادلة التفاضلية ، لا يؤثر على استقرار النظام.
دعونا نعطي تعريفًا رياضيًا لمفهوم "الاستقرار". يكون النظام مستقرًا إذا كان المكون المجاني x ج (ر) يميل عابر إلى الصفر بمرور الوقت ، أي إذا
 , (4.2)
, (4.2)
أ إذا زاد المكون المجاني إلى أجل غير مسمى ، أي إذا
 , (4.3)
, (4.3)
الذي - التي النظام غير مستقر . أخيرًا ، إذا كان المكون الحر لا يميل إلى الصفر ولا إلى اللانهاية ، إذن النظام على حافة الاستقرار .
من الواضح ، في هذه الحالة ، أن قيمة مخرجات النظام ستميل إلى المكون القسري ، الذي يحدده التأثير الخارجي والجانب الأيمن من المعادلة. هذا الاستقرار يسمى مقارب .
دعونا نجد حالة عامة يكون فيها النظام الموصوف في المعادلة (8.1) مستقرًا. حل المعادلة يساوي المجموع
 , (4.4)
, (4.4)
أين جك - الثوابت حسب الشروط الأولية ؛ صك - جذور المعادلة المميزة
أ 0 صن + أن -1 صن -1 +… + أن -1 ص + أن = 0. (4.5)
يمكن أن تكون جذور المعادلة المميزة حقيقية (صك = أك) ، وهمي (صك = يبك) ومعقدة صك = أك + يبك , علاوة على ذلك ، فإن الجذور المعقدة دائمًا ما تكون مترافقة زوجيًا مع بعضها البعض: إذا كان هناك جذر بجزء تخيلي موجب ، فلا بد من وجود جذر له نفس المعامل ، لكن الجزء التخيلي السالب.
المكون العابر (8.4) في ر ® ¥ تميل إلى الصفر فقط إذا كان كل مصطلح في النموذج مع ك ه أكيلو طن ® 0. تعتمد طبيعة وظيفة الوقت هذه على نوع الجذر صك . ضع في اعتبارك كل شيء الحالات الممكنةترتيبات الجذر صك على المستوى المركب (الشكل 8.1) والوظائف المقابلة لها xك ( ر) ، والتي تظهر داخل الدوائر (كما في شاشة الذبذبات).
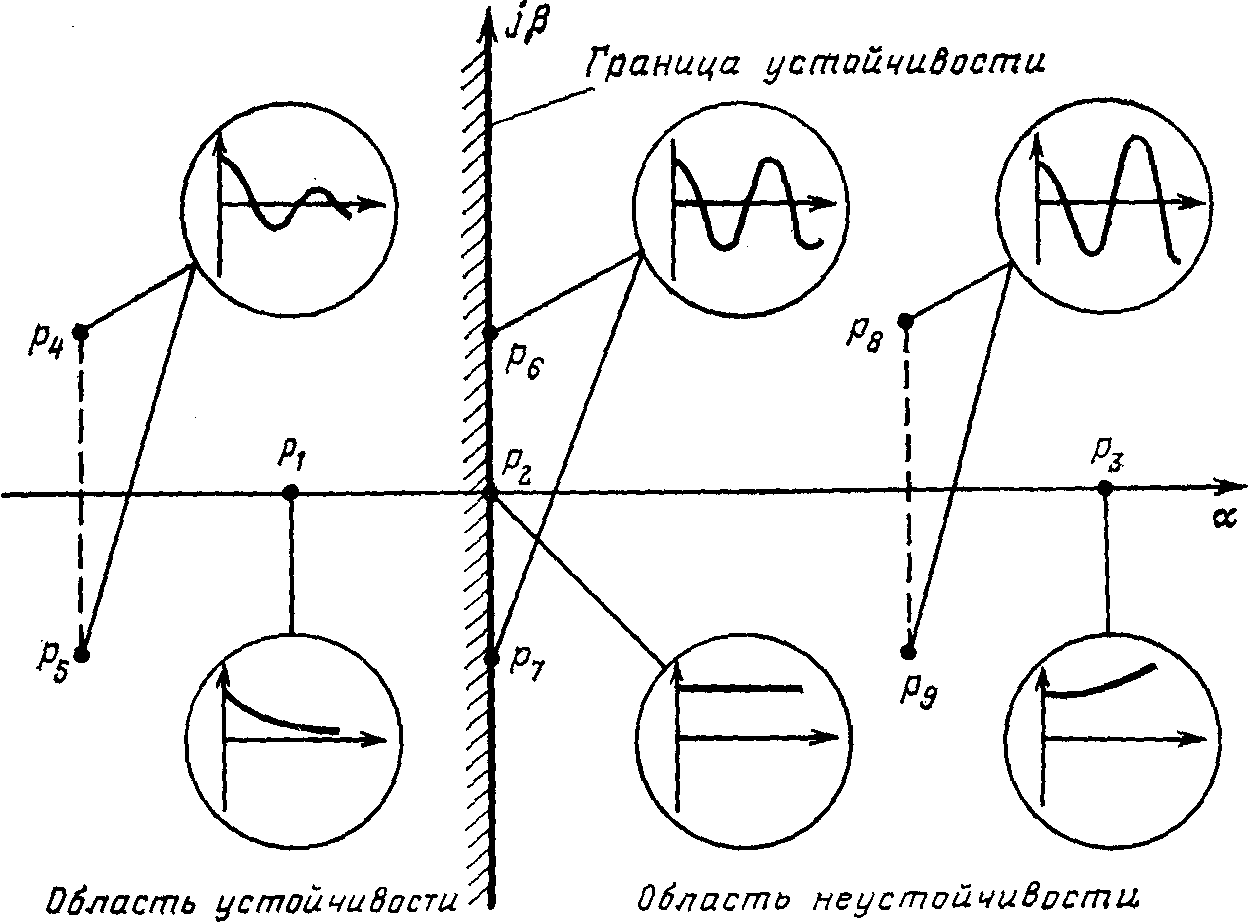
أرز. 4.1تأثير جذور المعادلة المميزة للنظام على مكونات حركته الحرة
1. لكل جذر حقيقي صك =
أ k في الحل (8.4) يتوافق مع مصطلح من النموذج
xك ( ر) = مع ك ه أكيلو طن. (4.6)
إذا أك< 0 (корень ص 1 ), ثم تعمل (8.6) من أجل ر®¥ يميل إلى الصفر. إذا أك> 0 (الجذر ص 3 ), ثم تزيد الوظيفة إلى أجل غير مسمى. إذا أك = 0 (جذر ص 2 ), ثم تظل هذه الوظيفة ثابتة.
2. كل زوج من الجذور المعقدة المترافقة صك = أك + يبك و صك = أك- يبتتوافق k في الحل (8.4) مع حدين يمكن دمجهما في مصطلح واحد
xك ( ر) = مع ك ه أكيلوطن خطيئة ( بك ر+ كيه). (4.7)
الوظيفة (8.7) شبيهة بالجيوب ذات التردد ب k والسعة التي تختلف أسيًا بمرور الوقت. إذا كان الجزء الحقيقي من اثنين من الجذور المعقدة أك (انظر الشكل 4.1 ، الجذور ص 4 و ص 5 ) ثم المكون التذبذب (8.7) سوف يتحلل. إذا أك> 0 (الجذور ص 8 و ص 9 ), ثم ستزداد سعة التذبذبات إلى أجل غير مسمى. أخيرًا ، إذا أك == 0 (الجذور ص 6 و ص 7), أي إذا كان كلا الجذور المترافقة خيالي ( صك = يبك , صك = - يبحسنا xك ( ر) هو شبيه الجيب غير المخمد بتردد بك .
إذا كان من بين جذور المعادلة المميزة (4.5) هناك لجذور متساوية ص ل , ثم في الحل (8.4) بدلاً من لشروط النموذج مع ك ه أسيحتوي kt على مكون واحد
(ج 0 +
ج 1
ر +
ج 2 ر
2 +…+
أ ل -1
ر ل -1
)  =
0. (4.8)
=
0. (4.8)
معتبرا أن وظيفة النموذج ه- bt لأي ب ينخفض أسرع من شروط النموذج ر ص , يمكن إثبات أنه في حالة تعدد الجذور ، فإن الحل (4.4) سيميل إلى الصفر فقط إذا كان الجزء الحقيقي من الجذور المتعددة سالبًا ص ل .
بناءً على التحليل الذي تم إجراؤه ، من الممكن صياغة عام حالة الاستقرار:
من أجل استقرار نظام التحكم الآلي الخطي ، من الضروري والكافي أن تكون الأجزاء الحقيقية لجميع جذور المعادلة المميزة للنظام سالبة.
إذا كان لجذر واحد على الأقل جزء حقيقي إيجابي ، فسيكون النظام غير مستقر. يعتمد استقرار النظام فقط على شكل جذور المعادلة المميزة ولا يعتمد على طبيعة التأثيرات الخارجية على النظام. الاستقرار هو خاصية داخلية للنظام ، متأصلة فيه ، بغض النظر عن الظروف الخارجية.
باستخدام التمثيل الهندسي للجذور على المستوى المركب (انظر الشكل 4.1) في شكل متجهات أو نقاط ، يمكننا إعطاء صيغة ثانية الحالة العامةالاستقرار (يعادل الاستقرار الرئيسي):
من أجل استقرار النظام الخطي ، من الضروري والكافي أن تكون جميع جذور المعادلة المميزة في نصف المستوى الأيسر.
المحور التخيلي يب هي حدود الاستقرار في مستوى الجذر. إذا كانت المعادلة المميزة لها زوج واحد من الجذور التخيلية البحتة (صك = +يب، صك + أنا = - يب ك) ، وجميع الجذور الأخرى في النصف الأيسر من المستوى ، ثم التذبذبات التوافقية غير المثبطة بتردد دائري w = | b k | في هذه الحالة ، يُقال أن النظام موجود في حد الاستقرار الاهتزازي .
النقطة ب = 0 على المحور التخيلي تقابل ما يسمى جذر الصفر. إذا كانت المعادلة تحتوي على جذر صفري واحد ، فسيكون النظام قيد التشغيل حد الاستقرار غير الدوري . إذا كان هناك نوعان من هذه الجذور ، فإن النظام يكون غير مستقر.
يجب ألا ننسى أن المعادلات الخطية أنظمة حقيقيةالنوع (4.1) ، كقاعدة عامة ، يتم الحصول عليه نتيجة التبسيط والتبسيط الخطي للمعادلات غير الخطية الأصلية. السؤال الذي يطرح نفسه: إلى أي مدى يكون تقدير الثبات وفقًا للمعادلة الخطية صالحًا لنظام حقيقي ، هل سيكون لشروط التمدد التي تم تجاهلها أثناء الخطية تأثير كبير على نتيجة التحليل؟ تم الرد عليها من قبل عالم الرياضيات الروسي أ. م. ليابونوف في عام 1892 في عمله "المشكلة العامة لاستقرار الحركة". لقد صاغ وأثبت النظرية التالية: إذا كانت المعادلة المميزة لنظام خطي لها جذر واحد على الأقل أو زوج واحد من الجذور الوهمية ، فمن المستحيل الحكم على استقرار نظام حقيقي من معادلة خطية. وبالتالي ، للحكم على استقرار النظام الخطي ، يكفي تحديد علامات الأجزاء الحقيقية لجذور المعادلة المميزة فقط.
في نظرية التحكم الآلي ، تم تطوير عدد من القواعد التي يمكن استخدامها للحكم على علامات الجذور دون حل المعادلة المميزة ودون إيجاد القيم العددية للجذور نفسها. تسمى هذه القواعد معايير الاستدامة .
يمكن أن تكون معايير الاستقرار جبريًا وترددًا. المعايير الجبرية وضع الشروط اللازمة والكافية لسلبية الجذور في شكل قيود مفروضة على مجموعات معينة من معاملات المعادلة المميزة. معايير التردد تحديد العلاقة بين استقرار النظام وشكل خصائص تردد النظام.
عند تحليل استقرار أنظمة التحكم ، عادةً ما يتم حل مهمة واحدة أو أكثر:
تقييم ما إذا كان النظام مستقرًا أم لا وفقًا لمعايير معينة ؛
تحديد مدى اختلاف البعض معلمات غير محددة الأنظمة.
^
4.2 معايير الاستقرار الجبري
أبسط معيار الاستقرار هو شرط لإيجابية معاملات المعادلة المميزة . إيجابية معاملات المعادلة (8.4) شرط ضروري (لكنه غير كاف!) لاستقرار النظام. هذا يعني أنه إذا كانت جميع المعاملات موجبة ، فيمكن أن يكون النظام إما مستقرًا أو غير مستقر. ولكن إذا كان معامل واحد على الأقل من المعادلة سالبًا أو يساوي صفرًا ، فإن النظام يكون غير مستقر.
الأكثر شيوعًا في الممارسة الهندسية هي معايير Hurwitz و Routh.
^ معيار هورويتز تم صياغته وإثباته في عام 1895 من قبل عالم الرياضيات الألماني أ. هورويتز ، الذي طور معياره من خلال حل مشكلة رياضية بحتة - مشكلة دراسة استقرار الحلول لمعادلة تفاضلية خطية. كما هو مطبق على مشاكل نظرية التحكم ، يمكن صياغة معيار Hurwitz على النحو التالي:
النظام الآلي الموصوف بواسطة المعادلة المميزة 8.5 إذا كان مستقرًا 0 >0 جميع المحددات موجبةد أنا طيب القلب
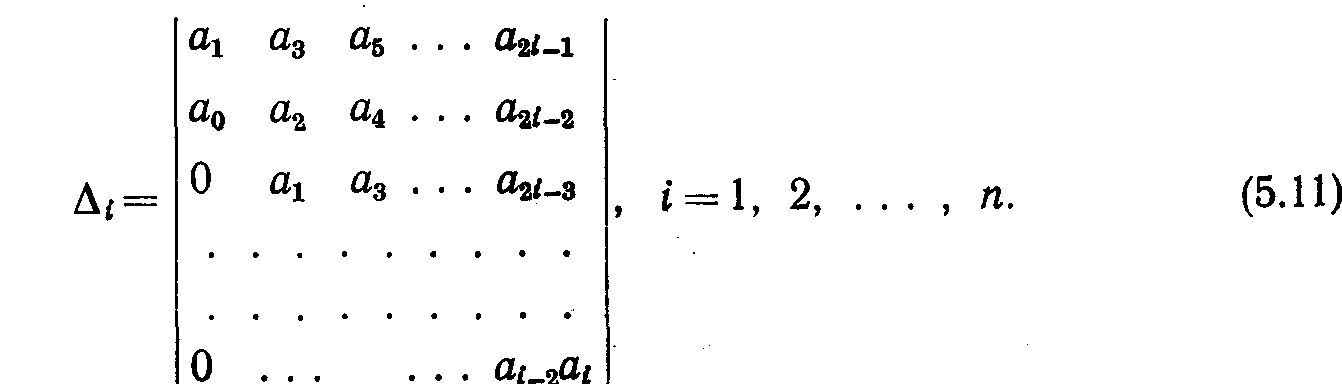
(4.9)
(كيف هو محدد المصفوفة أنا * أنا ).
إذا كان أحد المحددات على الأقل (4.9) ، يسمى محددات Hurwitz ، سلبيًا ، فهذا يعني أن النظام غير مستقر.
نظرًا لأن العمود الأخير من المحدد الرئيسي D n يحتوي دائمًا على عنصر واحد فقط أ ن، ثم وفقًا للخاصية المعروفة للمحددات D n = أ ند ن -1.
إذا كان المحدد الرئيسي D n == 0 وكانت جميع المحددات الأخرى موجبة ، إذن النظام قيد التشغيل حد الاستقرار . مع الأخذ في الاعتبار التعبير (4.12) ، ينقسم هذا الشرط إلى قسمين: أ ن = 0 و D ن -1 = 0.
حالة أ ن. = 0 يتوافق مع جذر صفري واحد ، أي حد الاستقرار غير الدوري ، والشرط د ن -1 = 0 - زوج جذور خيالية ، أي حد الاستقرار التذبذب .
من المناسب استخدام معيار Hurwitz لتحليل استقرار الأنظمة التي لا تزيد عن المرتبة الخامسة. في ص> 5 ، يصبح حساب المحددات مرهقًا.
^ معيار روث، الذي اقترحه عالم الرياضيات الإنجليزي إي جيه روس عام 1877 ، يُنصح باستخدامه في تحليل استقرار الأنظمة فوق المرتبة الرابعة. للقيام بذلك ، من معاملات المعادلة المميزة (4.5) تشكل جدولًا (الجدول 4.1) ، في السطر الأول ( أنا= 1) حيث يتم كتابة معاملات المعادلة ذات المؤشرات الزوجية ، في الثانية ( أنا= 2) - مع مؤشرات فردية ، في الأسطر اللاحقة ( أنا> 3) يتم وضع معاملات روث ، التي يتم الحصول عليها كمجموعات من معاملات الصفين الأعلى وفقًا للصيغة
ص ik = صط -2 ، ك + 1 - ( صط - 2 ، 1 صط -1 ، ك + 1 / صط -1 ، 1) ، (4.10)
أين أنا- رقم السطر، ك- رقم العمود. تم صياغة المعيار نفسه على النحو التالي: النظام التلقائي مستقر إذا. جميع معاملات العمود الأول من جدول روث موجبة (بما في ذلك أ 0 و أ 1 ).
الجدول 4.1معاملات روث
إذا لم تكن جميع معاملات العمود موجبة ، فهذا يعني أن النظام غير مستقر. في هذه الحالة ، يتغير عدد العلامات بين هذه المعاملات يتوافق مع عدد الجذور اليمنى للمعادلة المميزة. من السهل برمجة خوارزمية حساب المعاملات (4.10) ، لذلك يتم استخدام معيار Routh لتحليل الأنظمة عالية الترتيب ( ن> 5) بمساعدة الكمبيوتر.
تتمثل ميزة معايير Hurwitz و Routh في إمكانية استخدامها لتقييم استقرار كل من الأنظمة المغلقة والمفتوحة. الاستنتاج حول الاستقرار عند تطبيق هذه المعايير يتم إجراؤه فيما يتعلق بالنظام (مغلق أو مفتوح) ، يتم تحليل معادلته.
العيب هو ضعف الرؤية.
^
8.3 معايير ميخائيلوف
ينتمي معيار ميخائيلوف إلى مجموعة معايير ثبات التردد. تمت صياغته وإثباته في عام 1936 من قبل العالم السوفيتي أ. ف. ميخائيلوف في عمله "الطريقة التوافقية في نظرية التحكم" ، والذي كان موضع تقدير كبير وكان بمثابة بداية الاستخدام الواسع النطاق لطرق التردد في نظرية التحكم الآلي.
يعتمد معيار ميخائيلوف ، وكذلك معايير Hurwitz و Routh ، على تحليل المعادلة المميزة للنظام ، وبالتالي ، يمكن استخدامه للحكم على استقرار الأنظمة المغلقة والمفتوحة.
دع الجانب الأيسر من المعادلة المميزة ، يسمى كثير الحدود المميز ، له الشكل
و (ع) = أ 0 صن + أن -1 صن -1 +… + أن -1 ص + أن. (4.11)
دعونا نستبدل في هذا كثير الحدود جذرًا وهميًا بحتًا بدلاً من المتغير p ، والذي سيتم الإشارة إليه فيما يلي يث. ثم نحصل على دالة المتغير المركب
F(يث ) = أ 0 (يث ) ن + أن -1 (يث ) ن -1 +… + أن -1 يث + أن ، (4.12)
والتي يمكن تمثيلها بنفس طريقة خاصية السعة-المرحلة كمجموع الأجزاء الحقيقية والخيالية:
F(يث ) = ص(ث ) + جي كيو(ث ). (4.13)
جزء حقيقي ص(ث ) يحتوي فقط على قوى زوجية للمتغير w:
ص(ث ) = أن- أن - 2 W2 + أن - 4 ث 4 -. . . ، (4.14)
والجزء التخيلي س(ث ) - الفردية فقط:
س(ث ) = أن -1 ث - أن - 3 ث 3 + أن - 5 ث 5 -. . . . (4.15)
تتوافق كل قيمة ثابتة للمتغير w مع رقم مركب يمكن تمثيله كمتجه على المستوى المركب. إذا قمنا الآن بتغيير المعلمة w من 0 إلى ¥ ، فإن نهاية المتجه F(يث ) يصف خطًا معينًا (الشكل 4.2 ، أ) يسمى المنحنى المميز أو مخطط ميخائيلوف. يمكن استخدام شكل هذا المنحنى للحكم على استقرار النظام.
صياغة معيار ميخائيلوف:
يكون نظام التحكم الآلي الموصوف في معادلة الترتيب التاسع مستقرًا إذا ، عند التغيير ث من 0 إلى ¥ سوف يدور المتجه المميز للنظام F (jw) عكس اتجاه عقارب الساعة بزاوية n p / 2 دون التلاشي.
هذا يعني أن المنحنى المميز للنظام المستقر يجب أن يمر على التوالي من خلال تغيير w من 0 إلى صالأرباع. من التعبيرات (4.14) و (4.15) يتبع ذلك المنحنى F(يث ) يبدأ دائمًا عند نقطة على المحور الحقيقي ، بعيدًا عن الأصل بقيمة أن.
المنحنيات المميزة المقابلة للأنظمة المستقرة (الشكل 4.2 ، ب)لها شكل حلزوني ناعم وانتقل إلى اللانهاية في هذا الربع ، وعددها يساوي ترتيب المعادلة. إذا مر المنحنى المميز صالأرباع ليست متسلسلة أو تمر بعدد أقل من الأرباع ، فإن النظام غير مستقر (الشكل 4.2 ، ج). 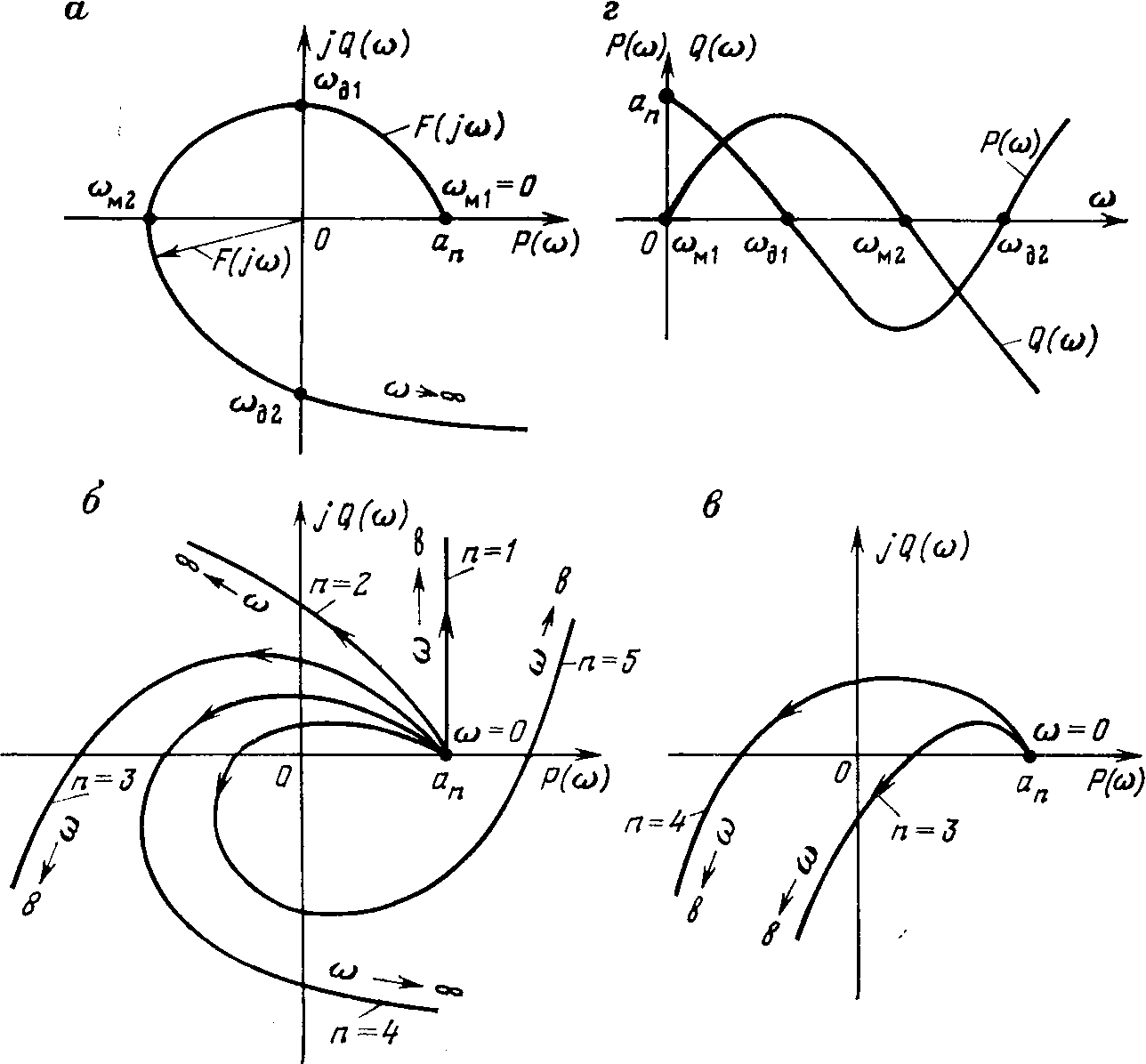
أرز. 4.2منحنيات مميزة (hodographs) ميخائيلوف
إذا كان المنحنى F(يث )
يمر عبر الأصل ، ثم يكون النظام على حدود الاستقرار. في الواقع ، إذا كانت المعادلة المميزة لها جذر صفري واحد ص k = 0 (حد الاستقرار غير الدوري) أو زوج واحد من الجذور الوهمية البحتة صك =
± يبك (حد الاستقرار التذبذب) ، ثم الوظيفة F(يث )
لـ w = 0 أو w = بسيذهب k إلى الصفر.
في العمليات الحسابية العملية مريحة للاستخدام نتيجة طبيعية لمعيار ميخائيلوف: يكون النظام مستقرًا إذا اختفت الأجزاء الحقيقية والخيالية للدالة المميزة F (jw) بدورها (الشكل 8.2 ، د) ، أي إذا كانت جذور المعادلات P (w) = 0 و Q (w) = 0 متناثرة .
يأتي هذا مباشرة من صياغة معيار ميخائيلوف - من حالة المرور المتتالي للمنحنى F(يث ) بجانب صالأرباع.
معيار ميخائيلوف مناسب للتطبيق على تحليل استقرار الأنظمة عالية الترتيب (ص > 5).
^
4.4 معايير نيكويست
تمت صياغة المعيار في عام 1932 من قبل الفيزيائي الأمريكي هـ. نيكويست ، وتم إثباته وتطبيقه على تحليل أنظمة التحكم الآلي بواسطة Mikhailov A.V.
يتيح معيار Nyquist الحكم على استقرار النظام من خلال خاصية مرحلة الاتساع للدائرة المفتوحة للنظام. هذه ميزة مهمة للمعيار ، حيث أن بناء خاصية طور السعة لدائرة مفتوحة لمعظم الأنظمة الحقيقية تبين أنه أبسط من بناء هودوغراف ميخائيلوف. تم تبسيط هذا البناء بشكل خاص للأنظمة أحادية الحلقة التي تتكون من روابط قياسية. وفي الحالات التي غير معروفوصف رياضي لعدة العناصر الهيكليةلا يمكن تقييم خصائصها إلا من خلال التحديد التجريبي لخصائص التردد ، ومعيار نيكويست هو المعيار الوحيد المناسب.
الصيغة الأساسية لمعيار نيكويست هي:
يكون نظام التحكم الأوتوماتيكي مستقرًا إذا كانت خاصية طور الاتساع W (jw) للدائرة المفتوحة لا تغطي النقطة بالإحداثيات (-1 ؛ j0).
هذه الصيغة صالحة للأنظمة المستقرة في الحالة المفتوحة. هذه هي غالبية الأنظمة الحقيقية التي تتكون من عناصر مستقرة.
على التين. يوضح الشكل 4.3 ، a خصائص مرحلة الاتساع لدائرة مفتوحة ، تقابل ثلاث حالات مختلفة: النظام مستقر (منحنى 1) ؛ النظام على حدود الاستقرار الاهتزازي (منحنى 2) ؛ النظام غير مستقر (منحنى 3).
يمكن تفسير معيار نيكويست ماديًا على النحو التالي. افترض أنه عند إدخال النظام (الشكل 4.3 ، ب) توجد إشارة توافقية ز (ر)
== زم الخطيئة ث ربسعة صغيرة زم. اجعل التردد w مساويًا للتردد w p الذي فيه إزاحة الطور j ( يث) تم إنشاؤه بواسطة الارتباط دبليو(يث) يساوي - ص. ثم ستكون إشارة التغذية الراجعة السلبية في طور الإشارة ز (ر) ،وسيتم تلخيص القيم اللحظية للإشارات. 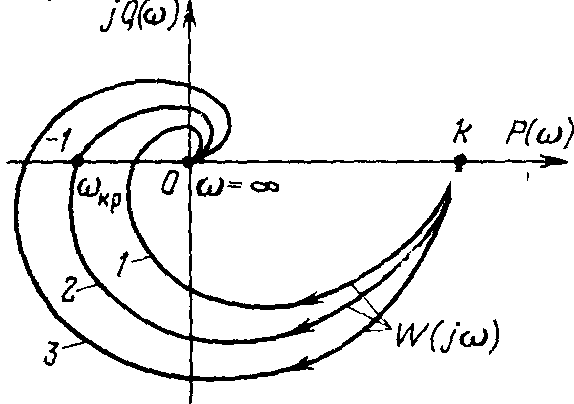
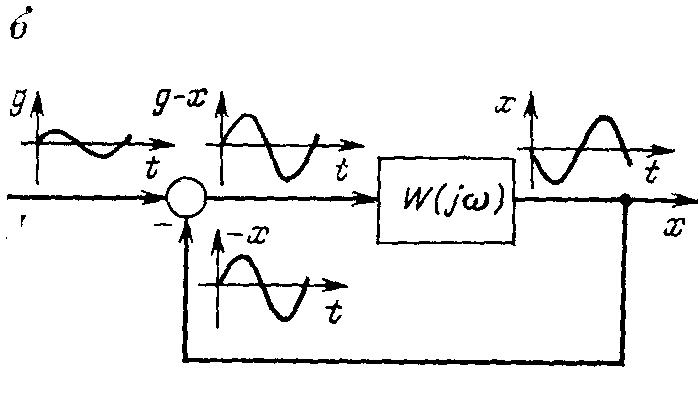
أرز. 4.3 خصائص مرحلة الاتساع لدائرة مفتوحة (أ) والتفسير المادي (ب) لمعيار نيكويست
إذا كان التردد w = w p ، الوحدة النمطية | دبليو (يث) | = 1 (لا يوجد تضخيم ولا قمع) ، ثم يتم الحفاظ على التذبذبات غير المخمد في دائرة النظام حتى بعد اختفاء التأثير الخارجي ز (ر) ،أي أن النظام سيكون على حدود الاستقرار. صفة مميزة دبليو(يث) يمر بالنقطة (-1 ؛ ي 0). إذا كانت عند التردد w = w p module | دبليو(يث) |< 1 (подавление есть), то после исчез-новения внешнего воздействия колебания в контуре затухнут, т. е. система устойчива, характеристика не охватывает точку (-1; ي 0). إذا كانت الوحدة النمطية | دبليو(يث) | > 1 (هناك ربح) ، ثم يزداد اتساع الإشارات في الدائرة إلى أجل غير مسمى ، أي أن النظام سيكون غير مستقر. صفة مميزة دبليو (يث) في هذه الحالة سوف تغطي النقطة (-1 ؛ ي 0).
وهكذا ، فإن الدور الخاص للنقطة (-1 ؛ ي 0) يكمن في حقيقة أنه ، أولاً ، يتوافق مع تحويل التغذية المرتدة السلبية إلى ردود فعل إيجابية ، وثانيًا ، هو الحد الفاصل بين أوضاع التضخيم والتوهين للإشارات بواسطة الارتباط دبليو (يث).
^
المحاضرة 5 . قوانين نموذجية لتنظيم ودقة البنادق ذاتية الدفع
5.1 خوارزميات التحكم النموذجية ACS
ضع في اعتبارك خوارزميات التحكم النموذجية (قوانين التنظيم) المستخدمة في الأنظمة الآلية الخطية.
1. يتم تطبيق أبسط قانون للمراقبة باستخدام رابط القصور الذاتي مع وظيفة النقل
دبليوص (ع) = ص (ع) /ه(ع) = كص = كص. (5.1)
وفقًا لهذا التعبير ، يتناسب إجراء التحكم في كل من الإحصائيات والديناميكيات مع إشارة الخطأ ه. لذلك ، يسمى قانون التنظيم هذا متناسب (ف).
مزايا وحدة التحكم P هي البساطة والسرعة ، والعيوب محدودة الدقة (خاصة عند التحكم في الأشياء ذات القصور الذاتي والتأخير العالي).
2. قانون التنظيم الذي يتوافق مع وظيفة النقل
دبليوص (ص)= كو / ص = كع / تيو ص (5.2)
اتصل متكامل (و). مع قانون تنظيم متكامل ، عمل الرقابة فييتناسب في كل لحظة مع تكامل إشارة الخطأ ه. لذلك ، تتفاعل وحدة التحكم I بشكل أساسي مع الانحرافات طويلة المدى للمتغير المتحكم فيه عن القيمة المحددة. يتم تسوية الانحرافات قصيرة المدى من خلال مثل هذا المنظم.
مزايا القانون المتكامل هي الأفضل (الدقة في ظروف الحالة المستقرة ، والعيوب هي أسوأ الخصائص في الظروف العابرة (سرعة أبطأ وتذبذب أكبر).
3. تم توزيع أكبر توزيع في الأتمتة الصناعية تكاملي نسبي قانون تنظيم (PI)
دبليوص (ص)= كص + كو / ص = كص + كع / تيو ص = كص (تيو ص + 1)/تيو ص. (5.3)
نظرًا لوجود مكون متكامل ، يوفر قانون التحكم PI دقة عالية في ظروف الحالة المستقرة ، ونسبة معينة من المعاملات كن و كو يوفر أداءً جيدًا في ظروف عابرة.
4. يتم تحقيق أفضل أداء مع التفاضل النسبي قانون تنظيم (PD)
دبليوص (ص)= كص + كد ص = كص + كص تيد ص. (5.4)
لا تستجيب وحدة التحكم PD ليس فقط لحجم إشارة الخطأ ، ولكن أيضًا لمعدل تغييرها. نتيجة لهذا ، يتم تحقيق تأثير التحكم. عيب قانون التنظيم النسبي التفاضلي هو الدقة المحدودة.
5. أكثر قوانين التنظيم مرونة (في فئة القوانين الخطية) هو مشتق متناسب متكامل قانون (PID)
دبليوص (ص)= كص + كو / ص + كد ص = كص (تيو ص + 1 + تيو تيد ص 2 )/تيو ص, (5.5)
الذي يجمع بين مزايا قوانين أبسط.
يتم استدعاء المعاملات والثوابت الزمنية المضمنة في وظائف النقل لوحدات التحكم النموذجية ضبط المعلماتولها الأسماء التالية: كص , كو، كد - معاملات الأجزاء المتناسبة والتكاملية والتفاضلية ؛ كص - معامل النقل للمنظم ؛ تيو - ثابت وقت التكامل ؛ تيد هو ثابت وقت التفاضل.
المعلمات المدرجة في الإدخالات المختلفة (5.1) و (5.5) من قانون PID مترابطة بالعلاقات:
كص =
كص
;
كو = كع /
تيو
;
كد =
كص
تيد. (5.6)
^
5.2 أنواع دقة تشغيل البنادق ذاتية الدفع
7.2.1. دقة ثابتة.
في الوضع الثابت ، تحدث الأخطاء فقط في النظام الثابت ، وفي النظام الاستاتيكي تكون مساوية للصفر ، لذلك لا يتم تقييم الدقة الثابتة إلا عند تحليل الأنظمة الثابتة.نظام التحكم الثابت هو نظام يكون الكائن ووحدة التحكم فيه عناصر ثابتة، بمعنى آخر.
دبليوس (0) = كأوه و دبليوع (0) = كص. (5.7)
الاستبدال في معادلات ديناميكيات المتغير الخاضع للرقابة (4.15) وللخطأ (4.24) لنظام أحادي الحلقة р == 0 والإعداد من أجل البساطة xن = 0 و xج = 0 ، نحصل على معادلات ثابتة لنظام ثابت:
للمتغير المتحكم فيه
x = xح كص كس (1 + كص كس) + ذالخامس كس (1 + كص كس) ؛ (5.8)
لإشارة الخطأ
ه = xح (1 + كص كس) -1 - ذالخامس كس (1 + كص كس) -1. (5.9)
المصطلح الأول على الجانب الأيمن من المعادلة (4.32) يصف الخطأ الثابت من حيث إجراء القيادة ، والثاني - الخطأ الثابت في الاضطراب. كل من هذه الأخطاء هي أكبر ، وكلما زادت التأثيرات الخارجية ، وأصغر ، زاد المقام (1 + كص كس). لذلك ، فإن دقة النظام الثابت هي الأفضل ، وكلما زاد كسب الحلقة المفتوحة.
عادة ما يتم تقدير دقة النظام الساكن بمعامل التدلي
س== د Xعالية الدقة Xص ، (5.10)
أين د Xع - انحراف القيمة الخاضعة للرقابة Xمن القيمة المحددة الناتجة عن الاضطراب فيفي = في v0 مع حلقة تحكم مفتوحة ؛ د Xح - انحراف القيمة الخاضعة للرقابة الناتج عن نفس الاضطراب في 0 في نظام مغلق. يوضح معامل droop عدد المرات التي يكون فيها انحراف قيمة الإخراج للكائن المتحكم فيه أقل من انحراف هذه القيمة للكائن غير المتحكم فيه (لنفس قيمة التأثير المزعج). من الواضح أن د Xع = د ذ in0 كس و د Xح = د ذ in0 كس / (1 + كص كس). ومن هنا العامل الساكن
س == (1 + كص كس) -1 == (1 + ك) -1 , (5.11)
أين ك = كص ك o - معامل التحويل لدائرة مفتوحة.
تعتبر دقة النظام الساكن مرضية إذا كان المعامل س= 0.1 -0.01. لذلك ، يجب أن يكون معامل التحويل الكلي للحلقة المفتوحة للنظام الثابت في حدود 10-100
^
5.3 مفهوم ومؤشرات إدارة الجودة
يتم تحديد جودة نظام التحكم الآلي من خلال مجموعة من الخصائص التي تضمن الأداء الفعال لكل من كائن التحكم نفسه وجهاز التحكم ، أي نظام التحكم بأكمله ككل. في نظرية التحكم الآلي ، تستخدم مصطلحات "جودة التحكم" بالمعنى الضيق: فهم يعتبرون فقط الخصائص الثابتة والديناميكية للنظام
. هذه خصائص النظام ,
حدد الكمية ,
اتصل مؤشرات جودة الإدارة
. هؤلاء تحدد الخصائص مسبقًا دقة الحفاظ على القيمة الخاضعة للرقابة عند مستوى معين في أوضاع ثابتة وعابرة، أي ضمان فعالية عملية الإدارة.
على وجه الخصوص ، لقد نظرنا دقة النظام في حالة ثابتة . الآن سننظر في مؤشرات الجودة التي تميز دقة النظام في الظروف العابرة .
يتم تقييم دقة النظام في الظروف العابرة باستخدام مؤشرات مباشرة وغير مباشرة. المؤشرات المباشرة يتم تحديده وفقًا لجدول العملية المؤقتة التي تحدث في النظام بإجراء خارجي متدرج. مؤشرات غير مباشرة يتم تحديد الصفات من خلال توزيع جذور المعادلة المميزة أو من خلال خصائص تردد النظام.
فئة خاصة من مؤشرات الجودة تشمل ما يسمى ب تقديرات متكاملة , والتي يتم حسابها إما مباشرة من دالة الانتقال للنظام ، أو من معاملات دالة النقل للنظام.
تذكر أنه وفقًا للمحاضرة ، يتم تحديد دقة النظام في الظروف العابرة بحجم انحرافات المتغير المتحكم فيه X (ر) من القيمة المحددة Xح (ر)ومدة وجود هذه الانحرافات. يعتمد حجم ومدة الانحرافات على طبيعة العملية المؤقتة في النظام. تعتمد طبيعة العملية المؤقتة بدورها على خصائص النظام والمكان الذي يتم فيه تطبيق الإجراء الخارجي.
في التقييم الأكثر عمومية للجودة ، يتم إيلاء الاهتمام بشكل أساسي لشكل عملية الانتقال. هناك العابرين نموذجية التالية (الشكل 5.1): تذبذبي(منحنى 1) ، روتيني(منحنى 2) و غير دوري(منحنى 3).
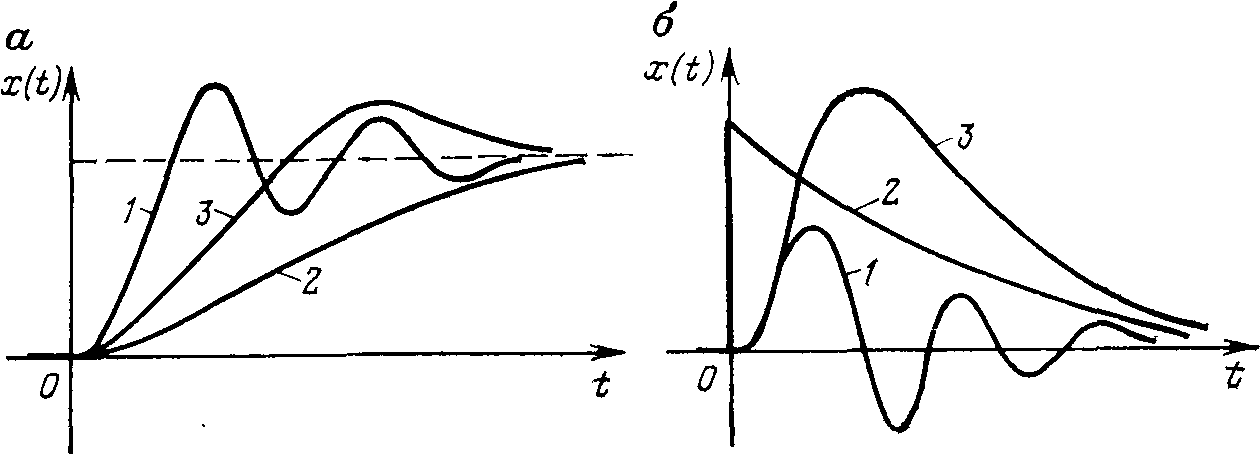
أرز. 5.1العابرين النموذجية:
أ -في مهمة؛ ب - من السخط
كل واحد من الثلاثة عمليات نموذجيةلها مزاياها وعيوبها ، ويتم تفضيل شكل أو آخر من العملية مع مراعاة خصائص الكائن المُدار. لذلك ، على سبيل المثال ، في الكائنات الكهروميكانيكية ذات النقل الحركي المعقد ( المصاعد، الحفارات ، منشآت الرفع) القوى المتناوبة الحادة غير مرغوب فيها ، وبالتالي ، عند اختيار إعدادات أنظمة التحكم لمثل هذه الأشياء ، فإنها تميل إلى عمليات غير دورية ورتيبة. في نظام التحكم في جهاز التخصيب الذي نعتبره ، يُسمح بالعمليات المتذبذبة العابرة ، لأن الانحرافات قصيرة المدى للقيم الخاضعة للرقابة لا تؤدي إلى تفاقم أداء التخصيب بشكل كبير.
^
10.2. المؤشرات المباشرة.
دعونا ننظر في المؤشرات الرئيسية لجودة التحكم فيما يتعلق بنظام التحكم النموذجي أحادي الحلقة.
على الرسوم البيانية العابرين، بسبب تغيير تدريجي في القوة الدافعة Xح ( ر) (الشكل 5.2 ، أ) والاضطرابات فيج ، تعمل عند مدخلات الكائن (الشكل 5.2 ، ب) ، لأصل قيمة الإخراج X(ر) القيمة المقبولة X(- 0) ، والتي كانت قبل تطبيق خطوة التأثير. 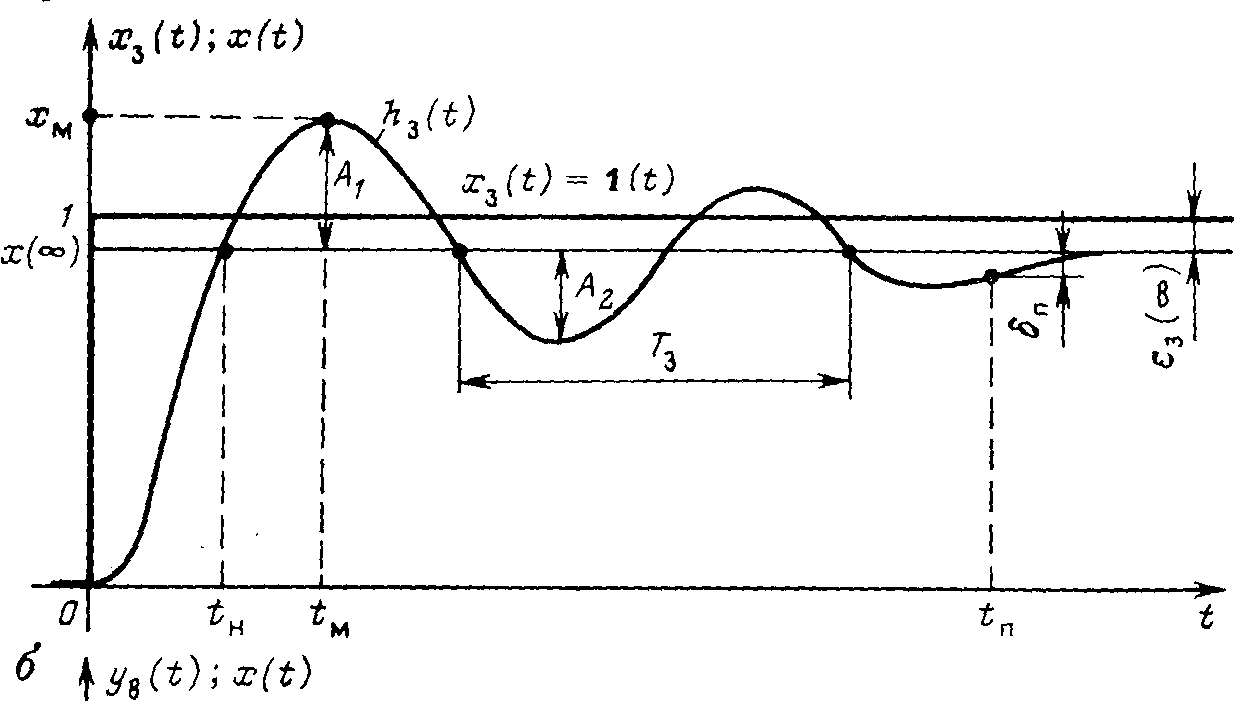
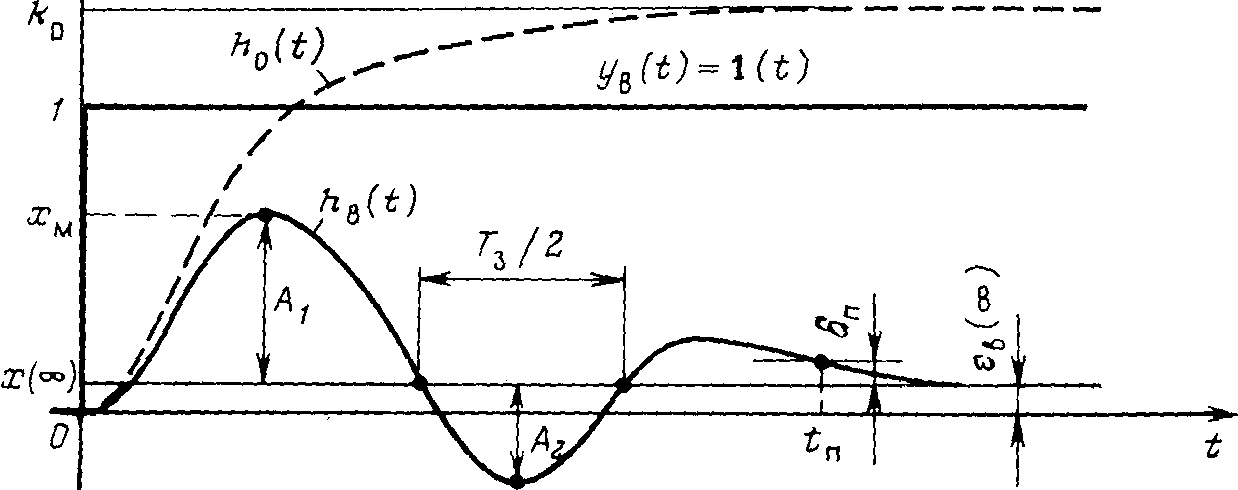
أرز. 5.2المؤشرات المباشرة لجودة العملية التنظيمية:
أ - في قناة المهمة ؛ ب-بيقناة اضطراب
أحد المؤشرات الرئيسية المباشرة للجودة هو التجاوز s (٪
),
والتي تساوي نسبة الحد الأقصى الأول للانحراف للمتغير المتحكم فيه س (ر)من قيمته الثابتة X (¥
) لقيمة الحالة المستقرة هذه (انظر الشكل 5.2 ، أ):
س = 100 (Xم - X(¥)) / X(¥) = 100 أ 1 / X(¥). (5.1)
تعتبر جودة المراقبة مرضية إذا لم يتجاوز التجاوز 30-40 %.
للعمليات العابرة الناجمة عن العمل المضطرب فيعند إدخال الكائن (انظر الشكل 5.2 ، ب)يمكن تعريف التجاوز على أنه نسبة الانحراف الأقصى (السلبي) الثاني أ 2 إلى أقصى انحراف أول أ 1:
س = 100 أ 2 / (Xم - X(¥)) = 100 أ 2 / أ 1 . (5.2)
يُطلق أيضًا على المؤشر المحسوب بهذه الصيغة للعمليات العابرة على طول قناة الاضطراب تقلب .
اخر خاصية مهمةهذه العمليات تخدم عامل التحكم الديناميكي R د (%) ، الذي يساوي النسبةأول أقصى انحراف Xم لانحراف متغير الإخراج X(ر) من كائن غير منظم ناتج عن نفس الاضطراب ، أي
ص د = 100 Xم / كا. (5.3)
معامل في الرياضيات او درجة ص د يوضح مدى فعالية الإجراء التعويضي للجهة المنظمة على الكائن.
لاحظ أن أول حد أقصى للانحراف Xم , الناشئة عن اضطراب في مدخلات الكائن ، هو مؤشر الجودة. عند تكوين متطلبات النظام ، تتم الإشارة إلى القيمة المسموح بها للانحراف الأقصى.
مدة وجود الانحرافات الديناميكية للمتغير المتحكم فيه X (ر) Xيتم تقدير (¥) عادة باستخدام عدة لحظات مميزة من الوقت. أهم هذه المؤشرات هو مدة عابرة (وقت التنظيم) ر ص - الفترة الزمنية من لحظة تطبيق إجراء الخطوة إلى اللحظة التي تليها انحرافات المتغير المتحكم فيه X (ر) من قيمته الحالة المستقرة الجديدة X(¥) تصبح أقل من عدد معين د ص ، أي حتى اللحظة التي بعدها الشرط | س (ر) - س (¥) | < d п. В промышленной автоматике величину d п принимают обычно равной 5 % от установившегося значения X(¥). عند تقييم مدة العمليات العابرة الناتجة عن تأثير واحد مزعج في c عند إدخال الكائن (انظر الشكل 5.2 ، ب) ، يمكن أن تؤخذ قيمة d p مساوية لـ 5٪ من قيمة معامل النقل للكائن ك o، "fr": ["JGHiExQGxqo"])





")



























