يمكنك تحسين دقة التنظيم بشكل كبير من خلال تطبيق قانون PID (قانون التنظيم النسبي-المتكامل-التفاضلي).
لتنفيذ قانون PID ، يتم استخدام ثلاثة متغيرات رئيسية:
P - النطاق النسبي ،٪ ؛
أنا - وقت التكامل ، ق ؛
D هو وقت التمايز ، s.
الإعداد اليدويتعد وحدة التحكم PID (تحديد قيم المعلمات P ، I ، D) ، والتي توفر الجودة المطلوبة للتنظيم ، معقدة للغاية ونادراً ما تستخدم في الممارسة العملية. توفر وحدات التحكم PID من سلسلة UT / UP ضبطًا تلقائيًا لمعلمات PID لعملية تحكم محددة ، مع الحفاظ على إمكانية الضبط اليدوي.
يفترض المثال أدناه أن المتغير هو درجة الحرارة ، وهي الأكثر شيوعًا ، لكن المبادئ تنطبق بالتساوي على جميع المتغيرات التناظرية. يوضح الرسم التخطيطي دورة التحكم في درجة الحرارة التلقائية.
يتكون من مستشعر درجة الحرارة وجهاز تحكم ومنظم طاقة. تقارن وحدة التحكم درجة الحرارة المقاسة بدرجة الحرارة المطلوبة ، والتي تسمى "نقطة الضبط" ، وتضبط طاقة الخرج لجعلها متماثلة. يسمى الفرق بين نقطة الضبط والقيمة المقاسة "إشارة الخطأ".
متناسب
في النطاق المتناسب ، الذي يحدده المعامل P ، ستتغير إشارة التحكم بما يتناسب مع الفرق بين نقطة الضبط والقيمة الفعلية للمعامل (عدم التطابق):
إشارة التحكم = 100 / P E ،
حيث E هو عدم التطابق.
معامل التناسب (الكسب) K يتناسب عكسيا مع P:
تتطلب وحدة التحكم التلقائية بعض الوسائل لقياس قيمة العملية. سيتم تنفيذ الخطية للقيمة المقاسة ، إذا لزم الأمر ، في وحدة التحكم. تستخدم تطبيقات درجة الحرارة عادةً مقياس حرارة مزدوجًا أو ترمومتر مقاومة. سيعتمد النوع على نطاق درجة الحرارة والبيئة التي سيتم تشغيله فيها.
في التطبيقات التي يصعب فيها تركيب مستشعر درجة حرارة ثابتة ، يمكن إجراء قياس درجة حرارة عدم التلامس باستخدام مقاييس البيرومتر الضوئية أو بالأشعة تحت الحمراء. تستخدم تطبيقات التحكم في العمليات الكبيرة عادةً مكيفات الإشارة لتحويل قياس المستشعر إلى إشارة من 4 إلى 20 مللي أمبير أو من 0 إلى 10 فولت. التيار المباشرليتم إرسالها إلى وحدة التحكم.
يتم تعريف النطاق المتناسب فيما يتعلق بنقطة ضبط التحكم المحددة ، وضمن هذا النطاق تتغير إشارة التحكم من 0 إلى 100٪ ، أي إذا كانت القيمة الفعلية ونقطة الضبط متساويتين ، فإن إشارة الخرج ستكون لها قيمة 50٪.
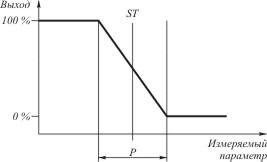
حيث P هي النطاق النسبي ؛
ST - نقطة ضبط التنظيم.
على سبيل المثال:
نطاق القياس 0 ... 1000 درجة مئوية ؛
نقطة ضبط التحكم ST = 500 درجة مئوية ؛
النطاق النسبي P = 5٪ ، وهي 50 درجة مئوية (5٪ من 1000 درجة مئوية) ؛
عند درجة حرارة تبلغ 475 درجة مئوية وأقل ، ستكون قيمة إشارة التحكم 100٪ ؛ عند 525 درجة مئوية وما فوق - 0٪. في النطاق 475 ... 525 درجة مئوية (في النطاق المتناسب) ، ستتغير إشارة التحكم بما يتناسب مع قيمة عدم التطابق مع كسب K = 100 / P = 20.
يؤدي تقليل قيمة النطاق المتناسب P إلى زيادة استجابة وحدة التحكم لعدم التطابق ، أي أن عدم التطابق الصغير سيتوافق مع قيمة أكبرإشارة التحكم. ولكن في نفس الوقت ، بسبب الكسب الكبير ، تأخذ العملية طابعًا متذبذبًا حول قيمة نقطة الضبط ، ولا يمكن تحقيق التحكم الدقيق. مع الزيادة المفرطة في النطاق المتناسب ، سوف تتفاعل وحدة التحكم ببطء شديد مع عدم التطابق الناتج ولن تكون قادرة على تتبع ديناميكيات العملية. من أجل التعويض عن عيوب التحكم التناسبي ، تم تقديم خاصية زمنية إضافية - المكون المتكامل.
تتطلب وحدة التحكم الأوتوماتيكية بعض الوسائل لتغيير قوة التسخين أو معدل التدفق أو الضغط من أجل التحكم في العملية. مرحل يستخدم للتحكم في الموصل أو صمام الملف اللولبي في أنظمة التدفئة والتبريد. المزايا: عمر خدمة طويل ، لا صيانةوالقدرة على التبديل السريع للسخانات ذات الكتلة الحرارية المنخفضة. كما أنها مثالية لوضع المحرك مواقد الغاز. هناك ثلاثة أنواع رئيسية من التحكم.
يتم تشغيل ناتج التسخين بالكامل عندما تكون درجة الحرارة أقل من القيمة المحددة ، أو يتم إيقاف تشغيله تمامًا عندما تكون أعلى. نتيجة لذلك ، تتقلب درجة الحرارة حول نقطة التحديد. السعة والفترة الزمنية للتذبذبات تعتمد على التأخير الحراري بين مصدر التسخين ومستشعر درجة الحرارة. لمنع الثرثرة الناتجة عندما تتجاوز درجة الحرارة المقاسة نقطة الضبط ، لا يتم تشغيل أو إيقاف تشغيل وحدة التحكم في نفس النقطة تمامًا. بدلا من ذلك ، يتم تطبيق تفاضل صغير يعرف باسم "التخلفية".
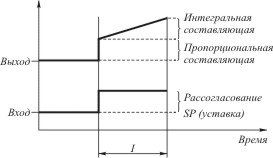
جزء متكامل
يتم تحديده من خلال ثابت وقت التكامل I ، وهو دالة للوقت ويوفر تغييرًا في الكسب (تحول النطاق المتناسب) خلال فترة زمنية معينة.
إشارة التحكم = 100 / P E + 1 / I ∫ E dt.
غالبية العمليات الصناعيةمثل بثق البلاستيك أو تشغيل المعادن أو معالجة أشباه الموصلات تتطلب تحكمًا ثابتًا في درجة الحرارة "بخط مستقيم" ، كما هو موضح أدناه. ناتج وحدة التحكم هو مجموع الشروط الثلاثة المذكورة أعلاه. الناتج المشترك هو دالة على حجم ومدة إشارة الخطأ ومعدل تغير درجة الحرارة أو قيمة العملية.
حساب معاملات متحكم PID
يوفر المصطلح النسبي مخرجات تتناسب مع حجم إشارة الخطأ. لن تتحكم أجهزة التحكم المتناسبة فقط بشكل عام في نقطة الضبط بالضبط ، ولكن مع إزاحة تقابل النقطة التي يكون عندها ناتج الطاقة مساويًا لفقدان الحرارة من النظام.
كما يتضح من الشكل ، إذا كان المكون النسبي لقانون التحكم لا يوفر انخفاضًا في عدم التطابق ، فإن المكون المتكامل يبدأ في زيادة المكسب تدريجيًا خلال الفترة الزمنية الأولى. بعد فترة زمنية ، تتكرر هذه العملية. إذا كان عدم التطابق صغيرًا (أو يتناقص بسرعة) ، فلن يزيد الكسب ، وإذا كانت قيمة المعلمة تساوي الإعداد المحدد ، فستأخذ بعض القيمة الدنيا. في هذا الصدد ، يتم التحدث عن المكون المتكامل كوظيفة الاغلاق التلقائيأنظمة. في حالة التحكم PID ، ستكون استجابة الخطوة للعملية تقلبات تتحلل تدريجياً نحو نقطة الضبط.
يزيل المصطلح المتكامل تعويضات التحكم في الحالة الثابتة عن طريق زيادة أو تقليل إشارة الخرج بما يتناسب مع اتساع ومدة إشارة الخطأ. يجب أن تكون سرعة المنحدر أكبر من وقت العملية الثابت لتجنب التقلبات.
يتناسب المصطلح المشتق مع معدل التغير في درجة الحرارة أو قيمة العملية. يتم استخدامه لمنع التجاوز والنقص في التحميل على نقطة الضبط واستعادة قيمة العملية بسرعة إلى نقطة التحديد إذا كان هناك تغيير مفاجئ في الطلب ، على سبيل المثال إذا تم فتح باب الفرن.
مصطلح مشتق
العديد من كائنات التحكم بالقصور الذاتي بما فيه الكفاية ، أي أنها تتأخر في الاستجابة للإجراء المطبق (الوقت الميت) وتستمر في الاستجابة بعد إزالة إجراء التحكم (وقت التأخير). ستتأخر وحدات تحكم PID على هذه الكائنات دائمًا مع تشغيل / إيقاف تشغيل إشارة التحكم. للقضاء على هذا التأثير ، يتم إدخال مكون تفاضلي ، والذي يتم تحديده بواسطة ثابت وقت التمايز D ، ويتم توفير التنفيذ الكامل لقانون التحكم PID. المكون التفاضلي هو المشتق الزمني لعدم التطابق ، أي أنه دالة لمعدل تغير معامل التحكم. في حال أصبح عدم التطابق قيمة ثابتة، يتوقف المكون التفاضلي عن التأثير على إشارة التحكم.
هيكل ومعلمات كائن التحكم
يقومون على التوالي بتعيين عدد الدرجات أعلى وأسفل نقطة الضبط التي ستبدأ عندها وحدة التحكم في زيادة أو تقليل طاقة الخرج. تتغير نسبة الوقت٪ على مرات الإخراج المرحل والتيرستورات والمنطق لتوفير خرج طاقة متغير من 0 إلى 100٪. توضح الرسوم البيانية أدناه المبدأ.
يجب أن يكون وقت الدورة قصيرًا بما يكفي للسماح للكتلة الحرارية للحمل بالتخفيف من نبضات التبديل. 20 ثانية نموذجية. تتطلب الأنظمة ذات الكتلة الحرارية المنخفضة أوقات دورات أسرع مما يمكن توفيره بواسطة المرحل. في هذه الحالات ، يتم استخدام مرحل الحالة الصلبة عادةً مع وقت دورة يصل إلى ثانيتين.
إشارة التحكم = 100 / P E + 1 / I ∫ E dt + D d / dt E.
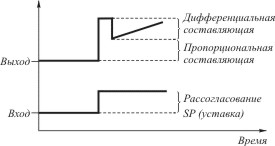
مع إدخال المكون التفاضلي ، تبدأ وحدة التحكم في مراعاة الوقت الميت ووقت التأخير ، وتغيير إشارة التحكم مسبقًا. هذا يجعل من الممكن تقليل تقلبات العملية بشكل كبير حول قيمة نقطة الضبط وتحقيق إنجاز أسرع للوقت.
وبالتالي ، عند إنشاء إشارة تحكم ، تأخذ وحدات التحكم PID في الاعتبار خصائص كائن التحكم نفسه ، أي تحليل عدم التطابق مع حجم ومدة ومعدل التغيير. بمعنى آخر ، "تتوقع" وحدة التحكم PID رد فعل الكائن الخاضع للرقابة على إشارة التحكم وتبدأ في تغيير إجراء التحكم ليس عند الوصول إلى القيمة المحددة ، ولكن مسبقًا.
تحتوي الصمامات الآلية على ملفين ، أحدهما لفتح الصمام والآخر لإغلاقه. يتحقق التحكم عن طريق إرسال نبضات معززة أو أقل إلى الملف المناسب. بعض الصمامات مجهزة بمقياس جهد تعليقللإشارة إلى موقفهم ، في حين أن الآخرين لا يفعلون ذلك.
تعمل هذه الخوارزمية بشكل جيد مع أو بدون مقياس جهد التغذية المرتدة للموضع. يتم إعطاء معادلات التحكم المقابلة أدناه. كلتا المعادلتين متساويتان ، أي إنها قابلة للتبديل. يتم ذلك عن طريق المكون التفاضلي لوحدة التحكم. لذلك ، فهي مناسبة بشكل خاص لأنظمة التحكم البطيئة. إنها ليست مناسبة للأنظمة التي يتم التحكم فيها بسرعة كبيرة أو الأنظمة الخاضعة للرقابة ذات المتغيرات النابضة التي يتم التحكم فيها.
5. وظيفة النقل التي يتم تمثيل الارتباط لها: K (p) \ u003d K / Tr
عند إنشاء أجهزة أتمتة مختلفة ، غالبًا ما تكون المهمة هي توفير سرعة دوران معينة لعمود المحرك ، بغض النظر عن الحمل الحالي.
ليس من الصعب أن نرى أن سرعة دوران عمود المحرك لا تعتمد فقط على الجهد على المحرك ، ولكن أيضًا على التأثيرات الخارجية غير المعروفة على المحرك ، مثل قوة الاحتكاك المتغيرة ، وتغير الحمل ، ودرجة الحرارة ، وجودة التشحيم ، و عوامل اخرى. لذلك ، يتم تقليل مهمة توفير سرعة دوران معينة لعمود المحرك إلى مهمة توليد مثل هذا الجهد على المحرك الذي من شأنه أن يوفر سرعة دوران معينة للمحرك ، بغض النظر عن تأثير العوامل العشوائية الخارجية.
ترشيح إشارة الإدخال ، معادلة الإشارة ، الوظيفة الجذر التربيعي. يحتوي هذا الجهاز أيضًا على مدخلات رقمية يمكن استخدامها لثلاثة أغراض: تبديل نقطة الضبط والتحكم في التشغيل / الإيقاف. أو خارج. التبديل بين التشغيل اليدوي والتلقائي.
من الواضح أن الحصة النسبية هي المسؤولة عن الانحراف الحالي. يفترض الجزء المتكامل جميع الاختلافات في القواعد في الماضي ، بينما يتنبأ الجزء التفاضلي بالتغييرات في العملية في المستقبل. إن الجمع بين هذه المكونات الثلاثة يجعل استراتيجية التحكم في العملية.
حل هذه المشكلة بدون نظرية تحكم تلقائىمستحيل. حل المشكلة هو الحساب والتنفيذ تحكم سرعة PID. يتمتع اختصاصيو Dean-Soft بخبرة في حل مثل هذه المشكلات.
توفر وحدة التحكم PID سرعة معينة على المشغل (المحرك) ، بغض النظر عن الحمل الثابت أو المتغير ببطء الذي يعمل عليه.
بالإضافة إلى ذلك ، يتم استخدامها في تنظيم الضغط والرطوبة والتدفق والعمليات الأخرى في مجال الأتمتة والتحكم التكنولوجي. المفاعل الدفعي هو نظام مغلق يكون فيه احتمال الفشل منخفضًا جدًا. هذه العملية لها طابع القصور الذاتي للغاية. نظرًا لأن كمية الحمض أو المادة الكاوية صغيرة مقارنة بحجم السائل ، فإن الأس الهيدروجيني يتغير ببطء.
- التحكم في درجة الحرارة في مفاعل دفعي.
- بالإضافة إلى ذلك ، عادة ما يتم إضافة الحرارة في مثل هذه الأنظمة وليس طرحها.
- ديناميات مثل هذه العملية أصغر أيضًا وغير خطية.
- لهذا السبب ترتفع درجة الحرارة. حتى مع الإعداد العالي ، بشكل تدريجي فقط.
وحدة التحكم PID هي وحدة تحكم تفاضلية تناسبية متكاملة. يتكون جهاز التحكم PID على التوالي من المتناسب ( ك ص )، أساسي ( ك و / س ) والتفاضلية ( ك د س ) ، كل منهم له مكاسبه الخاصة (الشكل 1).
أرز. 1. مخطط هيكلي لنظام تحكم مزود بوحدة تحكم PID.
وبالتالي ، إذا تم تعيين أحد المعاملات الثلاثة على 0 ، فلن يتم تضمين الحصة المقابلة في خوارزمية التحكم. للقيام بذلك ، يحتاج جهاز التحكم إلى معلومات حول الحالة الحالية للنظام في شكل قيمة مُقاسة. من هذا ، يتم إنشاء إشارة فرق. إذا تساوت القيمتان ، فلا حاجة إلى تصحيح ولن يغير ترددها.
ومع ذلك ، فإن العيب هو أنه كلما اقتربنا من نقطة الضبط وردود الفعل ، كان التصحيح أصغر. يؤدي هذا إلى إبطاء سلوك التحكم. من الناحية النظرية ، لا يتم الوصول إلى نقطة الضبط. يعمل أولاً كـ "ابدأ" ، لكنك تحدد أن نسبة إخراج التحكم يجب أن تكون في البداية. الوظيفة: تعيين نقطة الضبط. . يتم حساب قيمة الإخراج لمحرك الأقراص بالطريقة الآتية.
هنا: س هو مشغل لابلاس (يشار إليه أحيانًا باسم ص ). إذا استخلصنا من تحويلات لابلاس ، فإن السجلات K p و K و / س و ك د س يجب أن يؤخذ فقط كتسمية للرابط المقابل ، وليس كتعبير رياضي. وبالتأكيد لا يجب أن تبحث عن المعنى س ، لأنه ، كما ذكرنا سابقًا ، عامل وليس متغيرًا.
بالإضافة إلى ذلك ، بعض السمات للتخصيص. ينص هذا على أن القراءات لن تؤدي إلا إلى حدوث حدث إذا تغيرت بالفعل. يتم تشغيله عندما لا تتغير القراءة لفترة طويلة من الوقت: على سبيل المثال ، إذا لم تتغير الرغبة لعدة ساعات ، فلن يتم إطلاق أي حدث.
- حدد تردد الإخراج بواسطة محرك الأقراص بـ 15 دقيقة.
- تشير القيمة بعد النقطتين إلى أدنى تغيير.
- إذا كان هذا مفقودًا ، يؤدي كل تغيير إلى تشغيل حدث.
في نظام PID ، السرعة الفعلية الخامس (ر)يتم قياس المحرك باستخدام المستشعر.
في مدخلات النظاموصول نقطة ضبط السرعة V الحمار(ر)بنفس وحدات السرعة الفعلية.
عامل التغذية الراجعةتطرح من إشارة السرعة المرجعية الحمار الخامس (ر)إشارة السرعة الفعلية الخامس (ر)ويولد إشارة خطأ e (t) عند الإخراج:
ثم حدد مخططًا بناءً على المثال التالي. هذا له عيب أنه بعد تقليل فرق التحكم ، قد يكون هناك فترات طويلةالانتظار حتى آلية التشغيللا تتفاعل. تحقيقا لهذه الغاية ، تم تطوير الاستراتيجية التالية.
هذا ممكن وفقا ل الجملة التالية. مصدر الخطأ: نظام التدفئة غير جيد التهوية. في هذه الحالة ، تؤدي فقاعات الهواء في النظام إلى إعاقة تدفق المبرد. يسخن المبرد جزئيًا فقط أو "قرقرة". تم الإعلان عن مروحة المبرد هنا.
يتم إرسال إشارة الخطأ إلى متناسب, أساسيو التفاضليروابط وحدة تحكم PID.
ارتباط نسبييضاعف إشارة الخطأ e بعامل ك صويولد إشارة خرج ص ص.
ارتباط متكامليدمج الإشارة e (t) بمرور الوقت ، يضرب بعامل ك وويولد إشارة خرج ذ و.
مصدر الخطأ: المنطقة الميتة على محرك الأقراص
بالطبع ، قد تكون فقاعات الغاز في مكان آخر. عادة ، تضمن مجاري الهواء الأوتوماتيكية أن الغاز يمكن أن يفشل. لكنهم أيضًا "يتكلسون" بمرور الوقت. ومع ذلك ، يمر الوقت وبالتالي تتأثر جودة الرقابة.
مصدر الخطأ: عدم تطابق هيدروليكي
إذا كانت لدوائر التسخين الفردية مقاومة تدفق منخفضة جدًا ، فقد يحدث أن دوائر التسخين ذات المقاومة الأعلى لا يتم استبدالها مؤقتًا. فقط عندما تغلق دوائر التسخين المختارة جيدًا الصمامات ، يتم تزويد دوائر التسخين بمقاومة عالية كافية.
الارتباط التفاضلييميز إشارة الخطأ فيما يتعلق بالوقت e (t) ، بضرب النتيجة في الرقم ك دوتشكيل إشارة الخرج ذ د.
مجمع تحكم PIDيجمع الإشارات ص ص(ر), ذ و(ر)و ذ د(ر)ويولد إشارة خرج ص (ر):
من وجهة نظر تقنية التحكم ، من المنطقي تمامًا استخدام مضخات صديقة للبيئة وذات كفاءة عالية. ضغط مرتفعفي دائرة التسخين. إنها توفر ضغطًا ثابتًا للخط مع استهلاك منخفض جدًا للطاقة. يمكنك زيادة مقاومة التدفق للثرموستات الفردية بشكل انتقائي عن طريق الحد من فتح الصمام الأقصى.
هذا يعادل زيادة المقاومة الهيدروليكية بسبب صمامات التسخين المحددة أثناء الموازنة الهيدروليكية. الإعداد الصحيحتتطلب وحدة التحكم الكثير من الخبرة والمعرفة. إذا كنت تعمل فقط مع محركات السائر ، فأنت لا تحتاج حقًا إلى وحدة تحكم. لأن محركات السائر تقع مباشرة دون ردود فعل. الميزة ، بالطبع ، هي أنه يمكنك تغيير ديناميكيات المحرك من خلال وحدة التحكم. في تنظيم الكلمات ، قيل بالفعل أن المرء لديه نظام مغلق ، وأن المعنى الفعلي يعود مرة أخرى إلى شكل Nachstellen.
PWM ومفتاح الطاقةمصمم لنقل إشارة الخرج المحسوبة إلى المحرك ص (ر).
حساب معاملات متحكم PID
ليس من الصعب أن نرى أن المتحكم PID يتميز بثلاثة معاملات ك ص, ك وو ك د. لحساب هذه المعاملات ، من الضروري معرفة معلمات كائن التحكم ، في هذه القضيةمحرك.
هيكل ومعلمات كائن التحكم
من وجهة نظر نظرية التحكم الآلي ، يتم وصف محرك التيار المستمر تقريبًا بواسطة: رابطان غير دوريين مع ثابت زمني كهربائي تي هوثابت الزمن الميكانيكي تي م. الكسب العام للمحرك محرك ك(الصورة 2). في الواقع ، يعد مخطط كتلة المحرك أكثر تعقيدًا ، لكن هذا ليس مهمًا جدًا بالنسبة لنا في هذه الحالة.

أرز. 2. رسم تخطيطي للمحرك من وجهة نظر نظرية التحكم الآلي.
وظيفة نقل المحرك، مكتوبة من حيث عامل لابلاس س، الأتى:

كسب المحركمحرك ك يحدد التناسب بين سرعة دوران عمود المحرك عند الخمول والجهد المطبق على الإدخال. ببساطة ، النسبة تساوي نسبة السرعة حركة الخمول الخامس xxو الفولطيةمحرك يو ن.
يتم ضبط الجهد على المحرك في تقنية المعالجات الدقيقة في وحدات الجهد التقليدية ، ويتم أخذ السرعة بوحدات السرعة التقليدية.
إذا تم استخدام PWM 7 بت لتوليد الجهد على المحرك (انظر أدناه) ، ثم للحساب محرك كقيمة الجهد المقنن هي 128 وحدة جهد تقليدية.
السرعة البطيئة ث xx، المحددة في بيانات جواز السفر للمحرك ، يجب إعادة قراءتها بوحدات السرعة التقليدية الخامسxxيتم تحديده من خلال طريقة تنفيذ مستشعر السرعة.
على سبيل المثال ، افترض أنه تم استخدام مشفر تزايدي لقياس السرعة ، وهو موجود على عمود المحرك وله 512 علامة لكل ثورة. دع السرعة في الوحدات التقليدية تقاس بعدد العلامات لكل دورة حساب د ر. دع دورة الحساب ، التي تم الحصول عليها من خلال تقييم أداء الخوارزمية ، تساوي 0.001 ثانية. دع سرعة المحرك في وضع الخمول ث xx= 5000 دورة في الدقيقة.
دعنا نترجم سرعة المحرك إلى علامات استشعار ، نحصل على: 5000x512 = 2560000 علامة / دقيقة. لنحول الدقائق إلى دورات حسابية:
إذا كانت معلمات المحرك غير معروفة ، فسيتم تحديد سرعة الخمول بشكل تجريبي. للقيام بذلك ، في وضع الخمول ، يتم تطبيق أقصى جهد على المحرك ويتم أخذ القراءات من مستشعر السرعة الخامس xx.
ثابت الوقت الميكانيكي تي م يعتمد على لحظة القصور الذاتي في عمود المحرك ، وعلبة التروس ، والقصور الذاتي جهاز تنفيذي. عادة لا يكون من الممكن حساب قيمته تحليليًا. لذلك ، يتم قياسه تجريبياً.
للقيام بذلك ، يتم تطبيق الحد الأقصى للجهد بشكل مفاجئ على المحرك عند حمله المقنن ويتم إزالة العملية المؤقتة لتغيير السرعة الخامس (ر).
يتم أخذ السرعة من مستشعر السرعة في أوقات منفصلة ، ويتم تسجيلها في ذاكرة الوصول العشوائي للمعالج الدقيق ، ثم يتم نقلها إلى جهاز كمبيوتر شخصي. يعيد الكمبيوتر الشخصي بناء الرسم البياني لتغيير السرعة الخامس (ر)(تين. 3).
 |
أرز. 3. عملية عابرة في محرك DC.
وفقًا للرسم البياني العابر ، من الممكن تحديد سرعة الخمول أولاً الخامس xxوثانياً ، وقت التنظيم ر ص. يتم تحديد وقت التحكم من خلال وقت انتهاء العملية المؤقتة (الوقت الذي يختلف فيه المنحنى العابر بأقل من 1٪ عن قيمة الحالة الثابتة).
إذا أهملنا التأثير الصغير لثابت الزمن الكهربائي تي ه، وعادة ما يكون ترتيبًا من حيث الحجم أصغر من ثابت الوقت الميكانيكي تي م، ثم يمكن اعتبار العملية العابرة في محرك DC غير دورية مع ثابت تي م.
من المعروف أن وقت عملية عابرة غير دورية أطول بخمس مرات من وقتها الثابت. أولئك.:
ومن ثم نحصل على حالتنا:
في حالتنا ، وقت التحكم ر ص، وفقًا للرسم البياني ، يساوي 1.5 ثانية. ثم ثابت الزمن الميكانيكي تي م= 1.5 / 5 = 0.3 ثانية.
وهكذا ، بعد رسم الرسم البياني للعملية العابرة ، نجد ثابت الوقت الميكانيكي تي م.
ثابت الزمن الكهربائيتي ه يحدد القصور الذاتي لمغنطة المحرك المحرك ويساوي نسبة محاثة المحرك إلى مقاومة لفه:
من الناحية العملية ، يصعب قياس معلمات محاثة المحرك ، ثم تأخذ ثابت الوقت الكهربائي بترتيب مقدار أقل من ثابت الوقت الميكانيكي:
هذا صحيح بالنسبة لمعظم المحركات.
حساب معاملات متحكم PID.
لحساب معاملات وحدة التحكم PID ، يجب على المرء أن يحل مشكلة الديناميكيات العكسية. للقيام بذلك ، نستخلص من وحدة تحكم PID. سنفترض أن هيكل وحدة التحكم ، أي وظيفة النقل الخاصة به دبليو ص(ق) ، غير معروف لنا. لهذا ، فإن وظيفة النقل لكائن التحكم معروفة دبليودي في(س)(الشكل 4).

أرز. 4. مخطط أولي لحساب وحدة التحكم لمحرك DC.
نكتب وظيفة النقل للنظام المغلق ث (س):
دعونا نحدد ما هي العملية العابرة في النظام التي تناسبنا؟ نحن راضون تمامًا عن غير الدورية عملية الانتقالفي النظام. هذه هي الطريقة التي يجب أن يستجيب بها النظام للتغيرات في السرعة والحمل.
دع الوقت المطلوب ثابتًا للوقت تيستكون متساوية تقريبًا تي م. أولئك. وظيفة النقل للنظام المطلوب ث(س) مساوي ل:
مساواة وظيفة النقل للنظام المغلق بوظيفة النقل للنظام المطلوب:
من خلال التحولات الرياضية البسيطة ، نعبر من هنا عن التعبير الخاص بوظيفة النقل لوحدة التحكم دبليو ص(س):
عوّض القيمة محرك دبليو(س):
دعنا نقدم المعاملات:
نحن نحصل:
ليس من الصعب أن نرى أننا حصلنا على المعامل للتو ج 1 ، المعامل قبل الارتباط لا يتجزأ مع 2 والمعامل أمام وصلة التفاضل ج 3. أولئك. حصلنا على هيكل تحكم PID الكلاسيكي مع المعلمات ك ص=مع 1 , ك و=ج 2 و ك د=ج 3 :
تنفيذ متحكم PID على معالج دقيق رقمي
يتم حاليًا تنفيذ الأنظمة التي تحتوي على وحدات تحكم PID رقميًا فقط ، ويتم حساب قوانين التحكم بواسطة معالجات دقيقة رخيصة لسلسلة AVR أو MCS -51. لاحظ أن المعالجات الدقيقة هي عدد صحيح ولا تدعم عمليات الفاصلة العائمة. هذا يتطلب من المبرمج تكييف الخوارزميات وفقًا لذلك.
في نظام PID ، يتم قياس سرعة المحرك باستخدام جهاز استشعار. السرعة الحقيقية تقاس بعدد صحيح من وحدات السرعة الشرطية. عادة ، يتم اختيار وحدات السرعة التقليدية بطريقة تجعل السرعة في c.u. تغيرت في النطاق من -127 إلى 127 (بايت واحد) ، في الحالات القصوى من -15 إلى 15 (يتم أخذ السرعة بهامش). لكن على أي حال ، يجب ألا يقل عدد زيادات السرعة عن عدد السرعات المطلوب.
يمكن قياس السرعة بواسطة المستشعرات التالية:

يتم إدخال السرعة المحددة إلى النظامفي نفس الوحدات التقليدية مثل السرعة الحقيقية. عادة ما يتم إرسال السرعة المحددة من معالج تحكم عالي المستوى أو كمبيوتر شخصي ، ويتم تخزينها في خلايا الذاكرة المناسبة للمعالج الدقيق.
عامل التغذية الراجعةتطرح من السرعة المحددة V الحمارالسرعة الحقيقية الخامسويستقبل ما يسمى بإشارة الخطأ ه:
معتبرا أن السرعة V الحمارو الخامسهي أعداد صحيحة في النطاق -127 إلى 127 ، يتم تنفيذ هذه العملية بكل بساطة على معالج دقيق عدد صحيح. يجب التأكد من أن النتيجة. إذا كان البريد<-127 , то e =127, а если e >12 7 ، ثم e = 127.
اشارة خطأ هيدخل إدخال وحدة تحكم PID ، أي على ارتباط نسبي ، متكامل وتفاضلي.
ارتباط نسبييولد إشارة خرج ص صبضرب إشارة الخطأ اللحظية بعامل ك ص.
معامل في الرياضيات او درجة ك صعادة ما يمثل قيمة غير صحيحة بين 0.5 و 2. لذلك ، لضرب عدد صحيح من عدد بايت واحد هلهذا المعامل استخدم الجدول ك ف ،أنا، والتي يتم حسابها مسبقًا:
ل أنا =-127...127علاوة على ذلك ، فإن الأرقام الواردة في الجدول تأخذ في الاعتبار القيود المفروضة على النتيجة ، والتي يجب أن تتحول أيضًا إلى بايت واحد ، ولا تتجاوز القيمة 127. أي إذا كانت نتيجة الضرب أكبر من 127 ، فخذها تساوي 127 ، وإذا كانت أقل من -127 ، فاعتبرها تساوي -127.
يجب أن يفهم المبرمجون أن المعالج يعتبر رقمًا موقّعًا أناكفهرس جدول بدون إشارة ، لذا فإن عناصر الجدول التي تحتوي على فهارس من -128 إلى -1 ستكون في الواقع في نطاق الفهرس من 128 إلى 255.
ثم الضرب بالمعامل ك صاستبداله باختيار عنصر الجدول ك ف ،أنامع الفهرس هـ:
عادة ما يتم حساب الجدول على جهاز كمبيوتر شخصي ويومض في ذاكرة المعالج الدقيق.
ارتباط متكامليولد إشارة خرج ذ ومن خلال دمج إشارة الخطأ هبالوقت والضرب بمعامل ك و.
هنا: تي- الوقت من بداية العمل.
يحسب المعالج الدقيق الرقمي التكامل عن طريق التكامل التدريجي بخطوة تساوي دورة الساعة للمؤقت D ر. وبالتالي ، بالنسبة للحالة المنفصلة ، يتم استبدال الصيغة بما يلي:
هنا k هو عدد دورات الحساب التي مرت منذ بداية العمل.
ضع في اعتبارك مجموع الكل هك. في الأساس ، إنه مجرد مجموع كل القيم ه ،وردت في كل دورة. هذا المبلغ يسمى المجموع المتكامل. س (لا ينبغي الخلط بينه وبين س - عامل لابلاس). يتم تنفيذ المجموع المتكامل كمتغير عالمي ويتم زيادته في كل دورة بالقيمة الحالية لإشارة الخطأ هـ:
عند حساب وحدة تحكم PID ، المعامل ك وعادة بين 0.05 و 2. دورة الحساب د ريتراوح من 0.0001 إلى 0.002 ثانية. وهكذا ، فإن المعامل ك ود رمن 5 · 10 -6 إلى 4 · 10 - 3. لأن هذا المعامل أقل بكثير من 1 ، ثم تنشأ مشكلة الضرب الصحيح به ، منذ ذلك الحين بعد الضرب سيكون دائمًا صفرًا.
لحل هذه المسألة ، دعونا نحاول ضرب المعامل ك ود ربالنسبة للبعض رقم ضخم أ ، وقسم المجموع المتكامل على نفس الرقم:

دلالة على المنتج ك ود ر · أ من خلال المعامل ب :
دعنا نختار رقمًا أ ، من مضاعفات العدد 256 xإلى النسبة ب كانت في النطاق من 0.05 إلى 5.
من أجل حساب النسبة S / A قم بتوسيع علامة الرقم س :
تنفيذ عملية حسابية 16 بت س، لو أ =256;
تنفيذ عملية حسابية 24 بت س، لو أ =256 2 ;
تنفيذ عملية حسابية 32 بت س، لو أ =256 3 .
ليس من الصعب إضافة رقم موقع 16 أو 24 أو 32 بت س رقم 8 بت موقع ه. لا تنسى ذلك إذا هإذا كانت موجبة ، فإن امتداد الإشارة سوف يملأ البتات عالية الترتيب بالأصفار ، وإذا كان سالبًا ، فسيتم ملء البتات عالية الترتيب بأخرى. للحد من تراكم المجموع المتكامل ، نطبق حدًا أعلى وأقل. عادة ما يتم ذلك على النحو التالي: إذا كانت البتة (علامة) الأكثر أهمية لا تساوي البتة قبل الأخيرة ، فيجب تعليق نمو المجموع المتكامل.
تذكر أن قسمة أي رقم على الرقم 256 xيعادل التحول الصحيح بمقدار xبايت على اليمين. دعونا نستخدم هذه القاعدة. خذ فقط البايت العالي من المجموع المتكامل س : في حالة العد 16 بت ، هذا يعادل إزاحة بمقدار بايت واحد ، في حالة العد 24 بت - 2 بايت ، في حالة العد 32 بت - بثلاثة بايت.
هكذا:
أين: س كبير- عدد البايت العالي س .
الضرب بعامل ب تنفذ في شكل جدول ب أنا، على غرار حساب معامل الارتباط النسبي:
الارتباط التفاضلي
دارة مشتقة تحسب إشارة الخرج y d - e 0 ننفذ في شكل جدول ج أناكما في حساب الارتباط النسبي:
مجمع تحكم PID
يضيف الأفعى بعد وحدة التحكم PID القيم اللحظية للإشارات ص ص, ذ وو ذ دويولد إشارة خرج ذ:
عند الجمع ، يجب التأكد من أن النتيجة في النطاق من -127 إلى +127 ، من خلال تنفيذ ، على سبيل المثال ، تجميع 16 بت. إذا كانت النتيجة أكبر من 127 ، فيجب أن تؤخذ تساوي 127 ، وإذا كانت أقل من -127 ، فستساوي -127.
يتم إنشاء إشارة PWM تلقائيًا بواسطة معالجات AVR. معالج دقيق واحد قادر على توليد ما يصل إلى 3 إشارات PWM للأجهزة. بالإضافة إلى ذلك ، يمكن إنشاء إشارة PWM برمجيًا بواسطة جهاز ضبط الوقت.
من الملائم تشكيل PWM 7 بت. في هذه الحالة ، يمكن توصيل مفتاح طاقة التحكم وفقًا للمخطط الموضح في الشكل. 4.
أرز. 4. طريقة توصيل مفتاح الطاقة بإخراج PWM.
ارتفاع (تسجيل) بت من النتيجة ذالإخراج من خلال أي دبوس I / O إلى أحد مدخلات مفتاح الطاقة ، ويمكن تحميل 7 بت المتبقية (آخر بت على صفر) دون أي تحويل في سجل تشكيل القطع لـ PWM.
دعنا نثبت ذلك.
Q.E.D.








")















